一种微小芯片节距调整装置
文献发布时间:2023-06-19 11:49:09
技术领域
本发明属于微小电子元器件技术领域,涉及一种微小芯片节距调整装置。
背景技术
随着微小超高清显示技术的发展,由于超高清显示需要超高密度的LED像素,每个像素均由对应的LED芯片组成,因此超高清的LED显示产品的制作需要将巨量的LED芯片的批量快速矩阵转移到对应的基板上。目前的转移技术较为成熟的还是采用机械结构的“吸→放”过程,即采用吸头将芯片从Wafer上吸起,然后转移到对应的基板上的对应位置,但在此过程中,无法对芯片的位置进行调整和纠正,虽然可以实现快速转移,但是转移之后,大量的芯片位置存在行列不齐的现象,影响了后续操作;降低了微型芯片快速巨量转移过程中的精度,远远不能满足超高清、超小像素间距的显示产品制作要求。
发明内容
本发明克服了现有技术的不足,提出一种微小芯片节距调整装置。目的是提高微型芯片快速巨量转移过程中的位置精度。
为了达到上述目的,本发明是通过如下技术方案实现的。
节距调整装置包括固定框架,所述固定框架内设置有可左右移动的节距调整机构,所述节距调整机构包括多个平行的节距执行板,相邻两个节距执行板之间的间距在推动机构下可等距离拉长和收缩,所述固定框架内设置有限位机构,所述限位机构用于节距执行板在拉长或收缩后的定位,所述节距执行板用于插入吸盘上微小芯片的行或列内进行节距调整。
进一步的,所述节距执行板中间布置有运动让位孔,丝杆上依次连接有出力板、动节距调整板、多个节距执行板,所述动节距调整板与出力板相连接,丝杆连接出力板的一端连接有驱动装置,出力板在驱动装置的作用下带动所述的动节距调整板沿丝杆进入运动让位孔,所述动节距调整板逐级推动多个节距执行板,用于使节距执行板之间拉伸至相同间距;远离出力板的节距执行板上连接有节距执行回位套,所述节距执行回位套在丝杆带动下用于推动多个节距执行板向出力板方向收回。
进一步的,所述动节距调整板的上下边缘对称设置有第一台阶,从出力板至节距执行板的方向所述第一台阶朝丝杆方向逐级内缩,所述固定框架内的上下壁对称设置有定节距调整板,所述定节距调整板边缘设置有与所述第一台阶相啮合的第二台阶;所述多节执行板的高度与上下第二台阶之间的距离依次相匹配。
更进一步,所述的限位机构包括原位固定板、原位节距限位套和固定弹片;所述原位固定板设置在固定框架的上下壁,且位于动节距调整板和邻近动节距调整板的节距执行板之间,用于节距执行板回缩时整体限位;所述原位节距限位套设置在连接多个节距执行板的导杆上,且位于相邻两个节距执行板之间,用于相邻两节距执行板之间的限位;所述固定弹片设置在第二台阶上。
优选的,所述节距调整装置得另一种结构:所述固定框架内一侧设置有出力板,所述出力板连接在丝杆上,所述丝杆连接有驱动装置,所述丝杆两侧设置有轨道;所述节距调整机构包括网状伸缩臂和多个节距执行板,所述网状伸缩臂包括依次滑动连接在所述轨道上的主动关节、多个滑动关节和主定关节,所述多个滑动关节之间连接有网状臂,所述网状臂通过多个中间关节实现伸缩;所述主动关节与出力板相连接,所述主定关节固定连接在远离出力板的一端;所述主动关节、滑动关节、主定关节均携带一节距执行板。
进一步的,所述主定关节通过固定板设置在固定框架上。
所述节距调整装置连接有拍齐运动机构,所述拍齐运动机构用于带动节距调整装置整体左右运动以拍齐微小芯片。
本发明相对于现有技术所产生的有益效果为。
本发明通过节距调整装置可简单快速的实现微小芯片节距调整,与多种转移装置相配合使用,提高了转移的效率和精度,无需复杂的设备即可完成,大量节约成本。本发明即适用于微小晶片,也适用于其他矩阵分布的其他微小芯片。
附图说明
为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,结合以下附图进行说明:
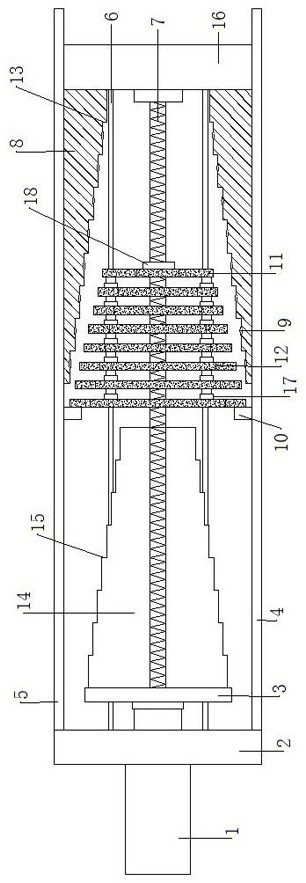
图1是实施例1所述的节距调整装置在节距执行板收缩状态时的侧视图。
图2是图1的俯视图。
图3是实施例1所述的节距调整装置在节距执行板伸长状态时的侧视图。
图4是图3的俯视图。
图5是实施例2所述的节距调整装置在节距执行板伸长状态时的侧视图。
图6是图5的俯视图。
图7是实施例2所述的节距调整装置在节距执行板收缩过程中状态的俯视图。
图8是实施例2所述的节距调整装置在节距执行板收缩后状态的俯视图。
图9是拍齐前的晶片。
图10是拍齐后的晶片。
图中,1为伺服马达,2为马达安装板,3为出力板,4为下挡板,5为上挡板,6为导杆,7为丝杆,8为定节距调整板,9为固定弹片,10为原位固定板,11为节距执行板,12为动节距板运动让位孔,13为定节距板台阶,14为动节距调整板,15为动节距调整板台阶,16为右挡板,17为原位节距限位套,18为节距执行回位套,19为晶片拍齐伺服马达,20为晶片拍齐运动机构,21为晶片;
06为轨道板,07为马达出力板,09为轨道槽,100为主动关节,110为滑动关节,120为中间关节,130为主定关节,140为固定板,150为网状机械臂。
具体实施方式
为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,结合实施例和附图,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。下面结合实施例及附图详细说明本发明 的技术方案,但保护范围不被此限制。
实施例1
本实施例是一种基于微真空加UV解离的方式批量转移微小LED芯片的方法。LED芯片经过外延生长、电极制作后形成整张的GaN或GaAs的Wafer,将Wafer晶元贴上蓝色胶膜,再经由激光切割或刀片切割后形成矩阵排列的单颗LED芯片,均匀分布在蓝色UV胶膜粘接面上。LED芯片经过点测筛选出不良品后,余下的良品为待转移Wafer片,也可以是芯片厂经过测试分选并重新排布的Wafer片。所述晶片电极外层材质为锡,厚度约5~30μm,Wafer晶元单颗均匀分布在UV胶膜上,电极朝上。
接下来就需要将整张Wafer的单颗晶元转移到对应的基板焊位上。
第一步:将Wafer经过可控精准扩张的扩晶机,将Wafer上单颗的晶片行列均匀的拉开一定的距离,便于后续的节距调整。
第二步:采用超硬钨钢等合金金属制成的微真空吸盘,吸盘表面要求光洁度与平整度达到0.5~5μm之间,理想状况是控制在2μm以内;吸盘上面密布巨量微孔,孔径在1~20μm,孔与孔间距控制在5-20μm,根据晶片大小选择合适的孔径与孔距,确保每个晶片能对应20个左右的的微孔,以确保晶片能够有效吸附在盘面上,并保持位置固定;吸盘通上真空,真空要求达到-70Kpa以上,确保每颗晶片牢固吸附在对应位置。
第三步:将扩张开的UV Wafer晶元,固定在UV架上垂直向下对准微真空吸盘(微真空吸盘盘面朝上),使UV胶膜Wafer缓慢贴近微真空吸盘面,打开真空。
第四步:从UV胶膜背面照射UV光,调整UV光功率大小,使UV胶粘接力下降到足以释放单颗晶片,晶片粘接力下降后受微真空吸附到吸盘面上,晶片与UV胶膜脱离。晶片电极朝上避免下步调整节距时划伤电极;电极朝向吸盘面。
第五步:使用节距调整装置,调整芯片行列节距,使芯片节距与基板矩阵行列一致。
第六步:再倒一次UV胶膜,将芯片电极倒向UV胶膜面。方法如下所述,采用透明玻璃凸点载板,将UV胶膜加热贴紧凸点载板,将凸点载板带着UV胶膜靠近微真空吸盘晶片,使晶片背面紧贴UV胶膜粘接面,减小真空直至关闭,使整面晶片转移至凸点载板上,每个晶片对应一个凸点;电极朝上。
第七步:本项目采用的基板晶片固定焊点表面喷锡工艺,所述锡层厚度为5~30μm,在晶片两个固定焊点中间点上晶片固定粘接胶,胶量大小控制在确保晶片贴附后不得接触到焊点范围。
第八步:将凸点载板UV胶膜上的凸点与晶片对应平贴到基板上晶片固定位置,使晶片电极面中间位置基板上所点的晶片固定粘接胶粘连,晶片两个锡电极与基板晶片固定位喷锡焊点相对应,误差为±5μm;晶片电极与基板各个晶片固定焊点接触。
第九步:打开UV光并调整UV功率照射透明凸点载板,使UV胶膜粘附力下降至小于晶片与基板晶片固定位的晶片粘接胶的粘接力,则整面晶片电极朝向焊点并转移至基板对应位置上。重复以上,继续转移其他晶片。
第十步:调整激光焊接头多束平行激光束间距与激光功率,使激光头的多束激光对准基板上的晶片电极,激光焊接头采用高速磁悬浮马达精准驱动,配合影像识别定位,多束激光束在晶片电极处瞬间加热到250~350℃,使晶片电极锡熔化再与基板焊位锡熔融形成连接,每个电极焊接时间约10~60ms可调,焊接完后及形成显示装置成品。
其中,第五步使用的节距调整装置,如图1-4所示,节距调整装置包括由左侧的马达安装板2,以及上挡板5、下挡板4、右挡板16围成的固定框架;伺服马达1安装在马达安装板2上,其中原位固定板10安装在上挡板5与下挡板4上,以在八块节距执行板11回位时限位。固定框架的中间轴向安装有丝杆7,丝杆7上下对称安装有两根圆形导杆6,导杆6为出力板3、动节距调整板14、以及八块节距执行板11提供运动导向,出力板3安装在丝杆7上可以左右运动,导杆6、丝杆7确保出力板3和节距执行板11运动不偏位。伺服马达1通过联轴器带动丝杆7运动,丝杆7带动出力板3出力,八块平行的节距执行板11也安装在丝杆7上,运动时丝杆7带动八块节距执行板11水平向右运动。动节距调整板14安装于出力板3上。节距执行板11、原位节距限位套17交替装配在导杆6上,每块节距执行板11通过丝杆7加两根导杆6形成三角支撑稳定结构,确保节距执行板11之间保持平行。节距执行板11中间布置有动节距板运动让位孔12,其中从左到右的第1-7块节距执行板11中间的动节距板运动让位孔12略大于动节距调整板14对应的台阶宽度,使动节距调整板14可以穿过对应的节距执行板11;另外第八块节距执行板11中间的动节距板运动让位孔12小于动节距调整板14末端,以使动节距调整板14向右运动时可以推动第八块节距执行板11向右运动,直到碰到定节距调整板8最右的台阶。动节距调整板14从左向右第1个台阶大于第七块的节距执行板11的让位孔,以可推动第七块节距执行板11向右运动,动节距调整板14的第2个台阶推动第六块节距执行板11向右运动,依次如此运动。当出力板3带动动节距调整板14推动八块节距执行板11向右运动,到依次接触定节距调整板8上的各个台阶,并被定节距调整板8上的固定弹片9固定住,完成节距变化调整。当节距需要回原位时,伺服马达1带动出力板3、丝杆7回位,出力板3带动动节距调整板14向左运动;丝杆7带动节距执行回位套18向左运动,节距执行回位套18带动节距执行板11克服固定弹片9阻力后向左运动,直到第一块节距执行板11碰到原位固定板10,然后依次原位节距限位套17碰到左边节距执行板11,最终第1-8块的节距执行板11全被回到初始位,每块节距执行板11之间的间距为原位节距限位套17的长度。
上述节距调整装置整体安装在晶片拍齐运动机构20上,并由晶片拍齐伺服马达19驱动,由晶片拍齐运动机构20带动节距调整装置做左右往复运动。本节距调整装置可实现两种节距变化调整,节距执行板11在左边原位为一种节距,向右运动到碰到定节距调整板8各个台阶时为一种节距。晶片拍齐运动机构20为现有的实现左右震动或晃动的机械装置。
原理:机构不动作时,伺服马达1带动节距执行回位套18使节距执行板11接触原位固定板10而限定在原位,节距执行板11间距为m。如图10所示,晶片经过精准扩张到要求间距m±0.02mm时,经过微真空吸盘吸住晶片后,由节距执行板11插入微真空吸盘上的晶片的行或列间隔,通过晶片拍齐伺服马达19驱动晶片拍齐运动机构20带动上述机构整体左右或移动,对晶片进行行或列拍齐。启动伺服马达1带动出力板3出力,推动动节距调整板14向右移动,从左向右依次穿过第一块至第七块节距执行板11中间的动节距运动让位孔12,动节距调整板14右边边碰到最右侧的第八块节距执行板11,动节距调整板14的出力台阶15再碰到第一至第七块节距执行板11,使节距执行板11的间距变为n,节距执行板11被定节距调整板8上的固定弹片9固定住,从而将晶片行或列间距条为间距n。再通过晶片拍齐伺服马达19驱动晶片拍齐运动机构20带动节距调整装置左右往复运动2次,使节距执行板11带动晶片行或列整体运动,从而完成节距变更与拍齐。要重复进行下一次动作时,伺服马达1回转带动节距执行回位套18拉动节距执行板11克服固定弹片9阻力,依次往左运动,节距执行板11接触到原位节距限位套17,并直到第一块节距执行板11碰到原位固定板10,节距调整装置停止运动,节距执行板间距变更为m,再重复下一次动作。需要调整不同节距时,只需更滑动节距调整板与定节距调整板、原节距限位套即可。
实施例2
如图5-8所示,是另一种节距调整装置,伺服马达1安装在马达安装板2上,马达安装板2与上挡板5、下挡板4、右挡板16形成固定框架。固定框架内一侧安装有马达出力板07,马达出力板07连接在丝杆7上,所述丝杆7连接有伺服马达1,在上挡板5、下挡板4之间有两块轨道板06,且两块轨道板06设在丝杆7两侧;在轨道板06中间分别有开一条轨道槽09。伺服马达1通过联轴器带动丝杆7转动,马达出力板07安装在丝杆7上,伺服马达1转动驱动马达出力板07左右运动。
节距调整装置还包括网状伸缩臂和多个节距执行板11,所述网状伸缩臂包括依次滑动连接在所述轨道槽09上的主动关节100、六个滑动关节110和主定关节130;主动关节100、六个滑动关节110和主定关节130之间连接有网状机械臂150,网状机械臂150通过多个中间关节120实现伸缩;主动关节100与马达出力板07相连接,主定关节130通过固定板140设置在右挡板05上。所述主动关节100、滑动关节110、主定关节130均携带一节距执行板11。马达出力板07通过主动关节100连接网状伸缩臂。
伺服马达1出力带动传动丝杆7运动,丝杆7带动马达出力板07左右运动,马达出力板07再推动网状伸缩臂做左右运动,带动节距执行板11运动,从而改变节距执行板11之间的节距。
上述节距调整装置整体安装在晶片拍齐运动机构20上,并由晶片拍齐伺服马达19驱动,由晶片拍齐运动机构20带动节距调整装置做左右往复运动。从而带动节距调整装置在合适的节距上拍齐晶片。晶片拍齐运动机构20为现有的实现左右震动或晃动的机械装置。
伺服马达1带动通过丝杆7带动马达出力板07运动,马达出力板07带动主动关节100沿轨道板06的轨道槽09运动,带动网状机械臂150与滑动关节110也沿轨道槽09运动,而主定关节130在固定板140的固定下不动,伺服马达1带动网状机械臂150做伸缩运动,网状机械臂150驱动节距执行板11变化不同节距。在伺服马达1拉动网状机械臂150往左运动时,节距执行板11间距为变大,图6中所示为a;伺服马达1推动节距执行板11往右运动时,节距执行板11节距逐步变小,运动到中间时,如图7所示,间距为b;当伺服马达1推动马达出力板07带动网状机械臂150运动到最右边时,节距执行板11间距最小,如图8所示,为c,节距大小依次为a>b>c。
具体运用时,晶片经过精准扩张到要求间距时,经过微真空吸盘吸住晶片后,由马达驱动出力板07带动网状机械臂150与节距执行板11调整到合适间距,使节距执行板11可以插入微真空吸盘上的晶片的行或列间隔中,再通过晶片拍齐伺服马达19带动晶片拍齐运动机构20驱动节距调整装置整体运动,拍齐晶片行或列。再通过节距调整装置的伺服马达1驱动节距执行板11调整到需要的间距即可。
以上内容是结合具体的优选实施方式对本发明 所做的进一步详细说明,不能认定本发明的具体实施方式仅限于此,对于本发明 所属技术领域的普通技术人员来说,在不脱离本发明的前提下,还可以做出若干简单的推演或替换,都应当视为属于本发明由所提交的权利要求书确定专利保护范围。
- 一种微小芯片节距调整装置
- 微小芯片节距调整装置