一种使用激光雷达对输电线路进行巡检的数据处理方法
文献发布时间:2023-06-19 11:49:09
技术领域
本发明涉及数据处理技术领域,具体说是一种使用激光雷达对输电线路进行巡检的数据处理方法。
背景技术
差分GPS系统可量测传感器的位置和速率,具有高精度、误差不根据时间积累的优点,但是也存在以下问题:动态性能差,易失锁,输出频率低,不能量测瞬间快速变化,没有姿态量测功能;而IMU数据具有姿态量测功能,能够完全自主、无信号传播,但是存在误差随着时间迅速积累增长的问题,因此两个系统可以说是优缺点互补,但是现在并没有很好的将两个系统进行综合的数据处理方法。
发明内容
为解决上述问题,本发明的目的是提供一种使用激光雷达对输电线路进行巡检的数据处理方法。
本发明为实现上述目的,通过以下技术方案实现:
一种使用激光雷达对输电线路进行巡检的数据处理方法,包括以下步骤:
①根据基站GPS和机载/车载GPS计算差分GPS,然后所得差分GPS与IMU数据联合处理后得到航迹文件,所述航迹文件包括影像航迹和激光航迹;
②原始激光数据结合步骤①所得激光航迹生成激光点云,对激光点云进行分类后,一方面进行危险源分析,另一方面处理得到数字高程模型DEM;
③原始影像结合步骤①所得影像航迹进行比对处理后,与步骤②所得数字高程模型DEM进行正射纠正,得到数字正射影像图DOM。
优选的,步骤①中所得差分GPS与IMU数据联合处理的过程为在差分GPS获取高精度的定位信息后,再将定位数据与IMU数据进行卡尔曼滤波,得到航迹文件。
优选的,步骤②中激光点云分类的内容为根据建模的对象类别,将激光点云分为地表、植被、建筑、山峰和河流。
优选的,步骤②中原始激光数据结合步骤①所得激光航迹生成激光点云的步骤采用GeoLAS V 1.0软件进行处理。
本发明相比现有技术具有以下优点:
本发明的使用激光雷达对输电线路进行巡检的数据处理方法,在差分GPS获取高精度的定位信息后,再将定位数据与IMU测量数据进行卡尔曼滤波处理,得到航迹文件(组合导航数据),包括航迹上每个采样点的精确坐标和三个姿态角(翻滚、俯仰、航向),此航迹文件可以为激光测距值提供解算大地坐标的依据,同时提供每张影像的外方位元素。
本发明的使用激光雷达对输电线路进行巡检的数据处理方法,既具有DGPS系统高精度,误差不随时间积累的优点,又具有IMU数据姿态量测功能,能够完全自主、无信号传播,因此该方法既能定位测速,又能快速量测传感器瞬间的移动,实现两个系统的综合,得到高精度的位置、速率和姿态数据。
本发明的使用激光雷达对输电线路进行巡检的数据处理方法,和传统的图像处理有较大的区别,得到的数据是目标实体的三维点云信息,激光雷达扫描时通过发射和接收的激光束扫描目标实体,利用激光束中心点来定位,并计算出每个点的三维坐标,使得点云数据包括三维坐标和目标实体表面丰富的摄影信息。
附图说明
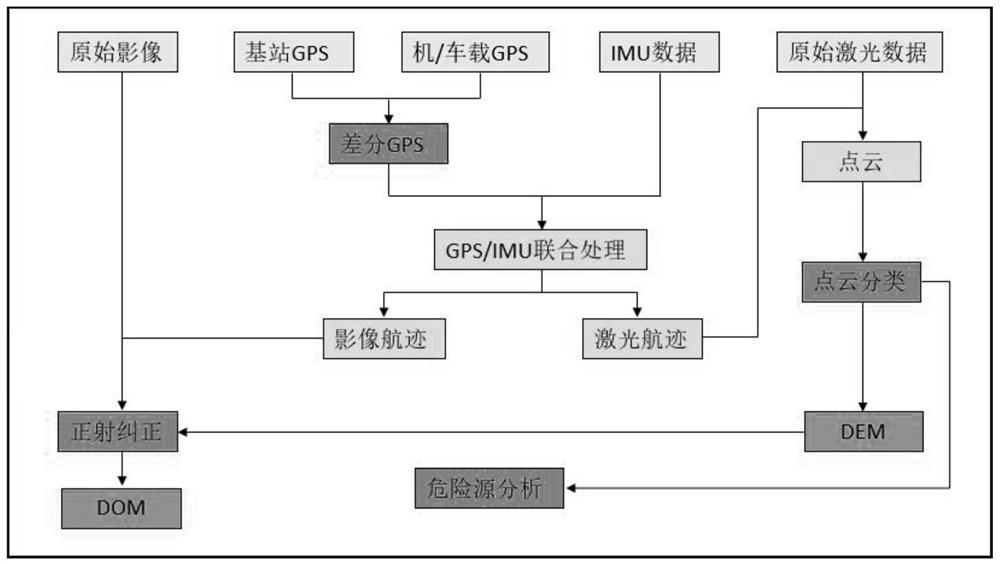
图1为使用激光雷达对输电线路进行巡检的数据处理方法的流程示意图。
具体实施方式
以下结合具体实施例来对本发明作进一步的描述。
一种使用激光雷达对输电线路进行巡检的数据处理方法,包括以下步骤:
①根据基站GPS和机载/车载GPS计算差分GPS,然后所得差分GPS与IMU数据联合处理后得到航迹文件,所述航迹文件包括影像航迹和激光航迹;
②原始激光数据结合步骤①所得激光航迹生成激光点云,对激光点云进行分类后,一方面进行危险源分析,另一方面处理得到数字高程模型DEM;
③原始影像结合步骤①所得影像航迹进行比对处理后,与步骤②所得数字高程模型DEM进行正射纠正,得到数字正射影像图DOM。
优选的,步骤①中所得差分GPS与IMU数据联合处理的过程为在差分GPS获取高精度的定位信息后,再将定位数据与IMU数据进行卡尔曼滤波,得到航迹文件。
优选的,步骤②中激光点云分类的内容为根据建模的对象类别,将激光点云分为地表、植被、建筑、山峰和河流。
优选的,步骤②中原始激光数据结合步骤①所得激光航迹生成激光点云的步骤采用GeoLAS V 1.0软件进行处理。
实施例1
激光雷达系统中有数据实时处理软件,所以在巡检过程中,即可得到赋有RGB色彩的点云数据,在飞行结束后,拷贝原始数据的同时可将成果数据一同拷贝出来,且在配数据链路情况下能够根据数据链将实时生成的LAS格式彩色点云数据传输地面站,然后在进入以下数据处理流程;
一种使用激光雷达对输电线路进行巡检的数据处理方法,如图1所示,包括以下步骤:
①根据基站GPS和机载/车载GPS计算差分GPS,然后所得差分GPS与IMU数据联合处理后得到航迹文件,所述航迹文件包括影像航迹和激光航迹;
②原始激光数据结合步骤①所得激光航迹生成激光点云,对激光点云进行分类后,一方面进行危险源分析,另一方面处理得到数字高程模型DEM;
③原始影像结合步骤①所得影像航迹进行比对处理后,与步骤②所得数字高程模型DEM进行正射纠正后,得到数字正射影像图DOM。
所得差分GPS与IMU数据联合处理的过程为在差分GPS获取高精度的定位信息后,再将定位数据与IMU数据进行卡尔曼滤波,得到航迹文件;航迹文件包括航迹上每个采样点的精确坐标和三个姿态角(翻滚、俯仰、航向),该航迹文件可以为激光测距值提供解算大地坐标的依据,同时提供每张影响的外方位元素。
步骤②中激光点云分类的内容为根据建模的对象类别,将激光点云分为地表、植被、建筑、山峰和河流。
- 一种使用激光雷达对输电线路进行巡检的数据处理方法
- 一种使用垂直起降固定翼无人机对输电线路进行巡检的方法