自动扶梯机器人的广告投放方法及装置
文献发布时间:2023-06-19 11:52:33
技术领域
本申请涉及机器人领域,尤其涉及一种自动扶梯机器人的投放方法及装置。
背景技术
广告作为一种宣传方式,已成为一种最为有效地商业营销手段。通过广告将产品广而告之,吸引顾客,从而为商家带来客源,但传统的广告主要通过广告牌、滚动广告栏等投放方式,且投放的地点在商场、地铁、车站等人流量较多的地方,能够达到较好的宣传的作用,然后现有的广告的投放方式都固定在一个位置,且不具有针对性,容易被部分顾客忽略,无法根据顾客类型定向播送广告,广告推送效率低。
发明内容
有鉴于此,本申请提供一种自动扶梯机器人的投放方法及装置,能够解决现有技术中广告投放位置单一,广告针对性差的问题。
为解决上述技术问题,本申请采用以下技术方案:
第一方面,本申请实施例提供了一种自动扶梯机器人的投放方法,所述方法包括:获取预乘自动扶梯的顾客的特征,其中顾客的特征可以包括顾客的面部特征、顾客的姿态、动作,和身体的高矮胖瘦、穿着、打扮等特征;根据所述顾客的特征判断所述顾客的感兴趣的广告信息,例如根据顾客的面部特征判断顾客年龄在20岁,可以向顾客推送20岁左右年纪的化妆品、衣服的广告等;向所述顾客推送所述感兴趣的广告信息。
根据本申请的实施例,可以针对顾客自身特征,有针对性地投放广告。
作为本申请的第一方面的一个实施例,所述方法还包括获取周围环境信息;根据所述周围环境信息判断自动扶梯的移动方向和地理位置;监测顾客的移动方向和移动轨迹;根据所述顾客的移动方向和移动轨迹以及所述自动扶梯的地理位置判断所述顾客是否预乘坐所述自动扶梯,若判断所述顾客预乘坐所述自动扶梯时,向所述自动扶梯和所述顾客移动,并获取所述顾客的特征。
由此,机器人可以判断顾客是否乘坐自动扶梯并向顾客移动。
当判断所述顾客乘坐所述自动扶梯时,移动至所述自动扶梯的始发层,并跟随所述顾客乘坐自动扶梯,以持续向顾客推送其感兴趣的广告信息。
由此,机器人可跟随顾客乘坐自动扶梯。
获取所述自动扶梯的加速度信息和自身与所述自动扶梯的距离;判断所述距离是否在预定距离内,当所述距离在所述预定距离内,结合所述自动扶梯的加速度信息开启对应的站扶梯模式以使自身固定在自动扶梯的始发层。
由此,机器人可以固定乘坐在自动扶梯上。
监测所述自动扶梯的加速度信息和自身在所述自动扶梯上的位置;根据所述加速度信息和自身在所述自动扶梯上的位置,判断自身是否到达所述自动扶梯的终点层,并在到达所述终点层时,开启下扶梯模式,以使自身离开所述自动扶梯。
由此,机器人可以在自动扶梯终点结束乘坐自动扶梯。
优选地,判断顾客对自身的感兴趣程度,并根据所述顾客对自身的感兴趣程度确定是否继续投放广告,所述感兴趣程度通过所述顾客的观看所述广告信息的时间长短,或者,所述顾客远离所述机器人的距离超过预设距离。
优选地,所述顾客的特征包括:面部特征、身体特征和动作特征中一种或多种。
第二方面,本申请实施例提供了一种自动扶梯广告投放装置,所述装置包括第一获取模块和处理模块。
第一获取模块,用于获取预乘自动扶梯的顾客的特征;
处理模块用于根据所述顾客的特征判断所述顾客的感兴趣的广告信息;
所述处理模块向所述顾客推送所述感兴趣的广告信息。
作为本申请第二方面的一个实施例,还包括第二获取模块和监测模块。
第二获取模块用于获取周围环境信息;
所述处理模块根据所述周围环境信息判断自动扶梯的移动方向和地理位置;
监测模块用于监测顾客的移动方向和移动轨迹;
所述处理模块用于根据所述顾客的移动方向和移动轨迹以及所述自动扶梯的地理位置判断所述顾客是否预乘坐所述自动扶梯,若判断所述顾客预乘坐所述自动扶梯时,向所述自动扶梯和所述顾客移动,并获取所述顾客的特征。
当所述处理模块判断所述顾客乘坐所述自动扶梯时,所述处理模块驱动底盘移动至所述自动扶梯的始发层,并跟随所述顾客乘坐自动扶梯,以持续向顾客推送其感兴趣的广告信息。
所述第二获取模块具体还用于:获取所述自动扶梯的加速度信息和自身与所述自动扶梯的第一距离;
所述处理模块判断所述第一距离是否在预定距离内,当所述第一距离在所述预定距离内,结合所述自动扶梯的加速度信息开启对应的站扶梯模式以使自身固定在自动扶梯的始发层。
作为本申请第二方面的一个实施例,还包括惯性监测模块。
惯性监测模块用于监测所述自动扶梯的加速度信息;
第二获取模块获取的自身在所述自动扶梯上的位置;
所述处理模块根据所述加速度信息和自身在所述自动扶梯上的位置,判断自身是否到达所述自动扶梯的终点层,并在到达所述终点层时,开启下扶梯模式,以使自身离开所述自动扶梯。
作为本申请第二方面的一个实施例,还包括判断顾客对自身的感兴趣程度,并根据所述顾客对自身的感兴趣程度确定是否继续投放广告。
优选地,所述感兴趣程度通过所述顾客的观看所述广告信息的时间长短,或者,所述顾客远离所述装置的距离超过预设距离。
优选地,所述顾客的特征包括:面部特征、身体特征和动作特征中一种或多种。
本申请的上述技术方案至少具有如下有益效果之一:
根据本申请实施例的自动扶梯广告机器人的投放方法及装置,在商超相对封闭的自动扶梯上下行过程中,能够针对商场顾客的特征,选择性地播放顾客感兴趣的广告,吸引顾客,从而为商家带来客源。
附图说明
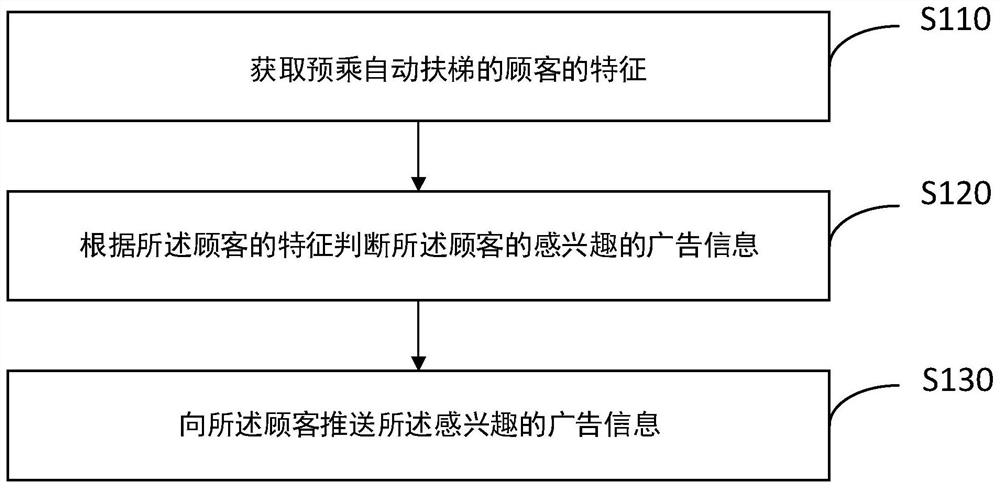
图1为本申请实施例的自动扶梯广告机器人的投放方法的流程图;
图2为本申请实施例的自动扶梯广告机器人的装置的示意图。
具体实施方式
为了使本申请的内容更容易被清楚地理解,下面将结合附图和实施例,对本申请的具体实施方式作进一步详细描述。以下实施例用于说明本申请,但不用来限制本申请的范围。
下面结合附图对本申请实施例的自动扶梯机器人的广告投放方法进行描述,图1示出了自动扶梯机器人的广告投放方法的流程图,如图1所示,该投放方法包括如下步骤:
S110,获取预乘自动扶梯的顾客的特征;
具体地,顾客的特征可以是面部特征、姿体特征、动作特征、穿着打扮等特征,下面以面部特征为例,机器人可以通过摄像头或红外传感器获取顾客画面,根据人脸抽特征算法,基于机器学习和深度学习,在人脸识别的同时,将捕捉到人脸和训练好的人脸模型比对,推断顾客的性别、年龄、穿戴、气质等特征。例如,顾客年龄约20岁,女性,戴眼镜、身高160、阳光爱笑;顾客年龄约10岁,男性、身高130、戴帽子、可爱活泼。本申请的其他实施例中,顾客特征也可以是顾客的身体特征和动作特征,在此并不作为唯一限定。
S120,根据顾客的特征判断顾客的感兴趣的广告信息;
其中,通过将上一步骤捕捉到的顾客人脸和人脸模型比对,找到与顾客特征相匹配的广告内容,例如,顾客年龄约20岁,女性,戴眼镜、阳光爱笑,会循环播放与20岁年纪相匹配的纯天然护肤品、服装衣帽等广告,顾客年龄约10岁,男性、戴帽子、可爱活泼,会循环播放10岁儿童大概率喜欢的童装、玩具、故事书等广告。
S130,向顾客推送感兴趣的广告信息。
其中,向顾客推送广告的方法可以是显示屏播放广告画面,广告画面包括广告物品与店铺地址,喇叭播放广告画外音,广告画外音描述商品的效果和促销活动,进而实现有针对性的广告投放,提高广告宣传的效率。
根据本申请实施例的自动扶梯机器人的广告投放方法,还包括如下步骤:
S210,获取周围环境信息;
具体地,可以通过摄像头或激光雷达扫描周围环境,运用SLAM技术,获取周围环境信息,其中包括机器人自身的定位和周围环境的障碍物、自动扶梯的位置、顾客的位置及运行轨迹等。在机器人移动的过程中,可针对周围环境信息定位自身即将移动的轨迹,在达到目标地点位置时,可以避免碰触周围环境的障碍物。
S220,根据周围环境信息判断自动扶梯的移动方向和地理位置;
例如,周围环境信息中获取自动扶梯的向上移动或向下移动,以进一步判断顾客和自身是需要上扶梯或是下扶梯。
S230,监测顾客的移动方向和移动轨迹;
其中,通过摄像头或激光雷达扫描周围环境,监测顾客的移动方向和移动轨迹,例如,顾客向自动扶梯方向由远及近移动,或者背离自动扶梯由近及远移动,或者是顾客始终固定在某一个位置,又或者来回独步等,进而判断顾客的移动方向和移动轨迹是否与自动扶梯所在方向一致。
S240,根据顾客的移动方向和移动轨迹以及自动扶梯的地理位置判断顾客是否预乘坐自动扶梯,若判断顾客预乘坐自动扶梯时,向自动扶梯和顾客移动,并获取顾客的特征。
其中,通过摄像头或激光雷达扫描周围环境,运用SLAM技术,定位机器人自身所在位置,获取周围环境中自动扶梯的移动方向和地理位置,同时监测顾客的移动方向和移动轨迹,当顾客的移动方向和移动轨迹与自动扶梯的方向和地理位置一致时,判断顾客选择乘坐自动扶梯,机器人向自动扶梯和顾客方向移动,进一步地,当判断顾客朝向自动扶梯所在的位置移动时,可以进一步通过顾客与自动扶梯之间的间隔是否达到指定阈值,例如当判断顾客由远及近距离自动扶梯的第一个台阶达到5米,则判断该顾客预乘自动扶梯,或者是,在机器人刚启动时,顾客已经处于5米内的距离,则判断该顾客为预乘自动扶梯。此时,向顾客移动,并获取顾客的特征,如执行上述步骤S110通过摄像头或红外传感器获取顾客的特征进而向顾客推送顾客感兴趣的广告。
根据本申请实施例的自动扶梯机器人的广告投放方法,还包括如下步骤:
S310,当判断顾客乘坐自动扶梯时,移动至自动扶梯的始发层,并跟随顾客乘坐自动扶梯,以持续向顾客推送其感兴趣的广告信息。
具体地,当摄像头或激光雷达监测到顾客乘坐自动扶梯时,机器人移动至自动扶梯的始发层,跟随顾客乘坐自动扶梯,并持续向顾客推送其感兴趣的广告,当人较多时,可以首先判断空间位置是否允许,若空间位置允许,移动至自动扶梯的始发层。
根据本申请实施例的自动扶梯机器人的广告投放方法,还包括如下步骤:
S410,获取自动扶梯的加速度信息和自身与自动扶梯的距离;
具体地,可以通过惯性测量单元获取自动扶梯的加速度信息,结合SLAM技术,获取机器人自身与自动扶梯的距离。
S420,判断距离是否在预定距离内,当距离在预定距离内,结合自动扶梯的加速度信息开启对应的站扶梯模式以使自身固定在自动扶梯的始发层。
其中,判断步骤S410获取的距离是否在预定距离内,当距离在预定距离内,结合惯性测量单元确定加速度信息与SLAM技术,当判断机器人已经移动至自动扶梯的始发层,开启对应的站扶梯模式,例如,启动自动锁止机构,将机器人与自动扶梯固定连接,增强机器人乘坐扶梯时安全性。
根据本申请的一个实施例,自动扶梯机器人的广告投放方法,还包括如下步骤:
S510,监测自动扶梯的加速度信息和自身在自动扶梯上的位置;
具体地,机器人在乘坐自动扶梯的过程中,通过惯性测量单元监测自动扶梯的加速度,结合SLAM技术,判断机器人自身在自动扶梯的位置。
S520,根据加速度信息和自身在自动扶梯上的位置,判断自身是否到达自动扶梯的终点层,并在到达终点层时,开启下扶梯模式,以使自身离开自动扶梯。
其中,通过惯性测量单元监测自动扶梯的加速度,结合SLAM技术,判断机器人是否到达自动扶梯的终点层,并在到达终点层时,开启下扶梯模式,例如,关闭自动锁止装置,使机器人与自动扶梯解除固定连接,离开自动扶梯。
根据本申请的一个实施例,判断顾客对自身的感兴趣程度,并根据顾客对自身的感兴趣程度确定是否继续投放广告。
也就是说,在机器人向顾客播放广告的过程中,通过摄像头或红外传感器捕捉顾客的面部表情或动作特征,如果通过面部表情或行为特征显示顾客对正在播放的广告不感兴趣,则选择切换其它类型的产品广告。其中,感兴趣程度可通过顾客的观看广告信息的时间长短来判断,或者,顾客远离机器人的距离超过预设距离来判断。
也就是说,在机器人向顾客播放广告的过程中,通过摄像头或红外传感器捕捉顾客的面部表情或动作特征,其中,面部表情可以是顾客眼睛是否观看广告信息,看到广告时,专注的眼神,即长时间观看广告屏的时间的长短,当顾客长时间注视广告时,如可以在顾客注视广告的时间超过5秒以上,判断顾客对正在播放的广告感兴趣,广告播放结束后,顾客依然在注视,可以选择继续播放同类型商品的广告。当顾客眼睛回避广告时,如注视广告的时间不超过5秒,则判断顾客对正在播放的广告不感兴趣,可以选择切换其他其它类型的产品广告,当顾客运行轨迹远离机器人时,判断顾客对正在播放的广告不感兴趣,可以选择下一位顾客以对其他顾客投放广告。
因此,通过上述广告投放方法步骤,可以实现顾客在商超乘相对封闭的自动扶梯过程中,机器人能够捕捉到顾客乘坐自动扶梯的动作,并跟随顾客乘坐自动扶梯,通过人脸识别获取顾客的特征,选择性地播放顾客感兴趣的广告,吸引顾客,从而为商家带来客源。
基于上面的描述,下面结合具体实施例对本申请的自动扶梯广告投放装置进行说明,如图2所示,本申请实施例的自动扶梯广告投放装置,该装置包括:
第一获取模块1001,获取预乘自动扶梯的顾客的特征,其中,顾客的特征包括面部特征、身体特征和动作特征中一种或多种;
处理模块1002,用于根据顾客的特征判断顾客的感兴趣的广告信息;
处理模块1002向顾客推送感兴趣的广告信息。
根据本申请实施例一个实施例,自动扶梯广告投放装置,还包括:
第二获取模块1003,用于获取周围环境信息,例如第二获取模块1003可以是摄像头或激光雷达等,结合运用SLAM技术等到详细的周围环境信息。
处理模块1002根据周围环境信息判断自动扶梯的移动方向和地理位置;
监测模块1004,用于监测顾客的移动方向和移动轨迹;
处理模块1002用于根据顾客的移动方向和移动轨迹以及自动扶梯的地理位置判断顾客是否预乘坐自动扶梯,若判断顾客预乘坐自动扶梯时,向自动扶梯和顾客移动,并获取顾客的特征。
优选地,当处理模块1002判断顾客乘坐自动扶梯时,处理模块驱动底盘移动至自动扶梯的始发层,并跟随顾客乘坐自动扶梯,以持续向顾客推送其感兴趣的广告信息。
优选地,第二获取模块1003具体还用于:获取自动扶梯的加速度信息和自身与自动扶梯的第一距离;
处理模块1002判断第一距离是否在预定距离内,当第一距离在预定距离内,结合自动扶梯的加速度信息开启对应的站扶梯模式以使自身固定在自动扶梯的始发层。
根据本申请实施例的自动扶梯机器人的广告投放装置,还包括:
惯性监测模块1005,用于监测自动扶梯的加速度信息;
第二获取模块1003获取的自身在自动扶梯上的位置;
处理模块1002根据加速度信息和自身在自动扶梯上的位置,判断自身是否到达自动扶梯的终点层,并在到达终点层时,开启下扶梯模式,以使自身离开自动扶梯。
根据本申请实施例的自动扶梯机器人的广告投放装置,处理模块1002还包括:
判断顾客对自身的感兴趣程度,并根据顾客对自身的感兴趣程度确定是否继续投放广告。
优选地,感兴趣程度通过顾客的观看广告信息的时间长短,或者,顾客远离装置的距离超过预设距离。
需要说明的是,本申请实施例提供的自动扶梯广告投放装置的具体工作过程在上述实施例中已经详细的说明,具体可参见上述实施例的,对此不在重复赘述。
根据本申请的一些实施例,公开了一种机器人,具体地,机器人可以包括:机器人主体包括机器人躯干,机器人躯干顶部设有机器人头部,机器人躯干底部设有机器人底盘;
机器人头部设有用于获取顾客特征的摄像头,以及广告投放装置,其中摄像头可以为人脸识别摄像头,其中,广告投放装置可以包括广告屏(触摸屏)、视频通话摄像头和视频通话麦克风,触摸屏、视频通话摄像头、视频通话麦克风和视频通话模块电连接;
机器人躯干的正面设有用于获取并分析环境中的人体位置信息的体感摄像头或激光雷达,以及设置在躯干内部的控制系统,该处理器与人脸摄像头、体感摄像头或激光雷达、和广告投放装置电连接;
机器人躯干上设有若干广告屏,该广告屏与控制系统连接;
机器人躯干底部设有可移动的机器人移动底盘;
自动扶梯广告机器人还包括:人脸识别模块,人脸识别模块、人脸识别摄像头、控制系统电连接,当人脸摄像头获取顾客的面部特征时,可以通过人脸识别模块识别顾客,例如,用于将获取到的顾客面部特征与预存的用户面部特征模型进行比对进而得到与该顾客相似的顾客的人群,以向该顾客推送顾客可能感兴趣的广告。
当用户面部特征与预存的顾客面部特征模型进行比对成功时,可以通过广告屏切换至与顾客面部特征模板对应的页面的广告播放模块,以通过广告播放模块向广告屏发送对应的广告。
根据本申请的一个实施例,该机器人还包括:规划机器人移动底盘的运动路径并控制机器人移动底盘运动的启停的底盘驱动模块,底盘驱动模块与体感摄像头和机器人移动底盘电连接。
优选地,底盘上设有与控制系统电连接的自锁模块,如,自动锁止机构,在机器人需要上下楼梯时,可以通过自锁模块将机器人固定在自动扶梯上,或从松开自动扶梯。
优选地,机器人底盘上设有用于在搭乘自动扶梯时获取第一加速度信息的惯性测量单元,惯性测量单元、自锁模块和控制系统电连接;第一加速度信息包括自动扶梯的起始位置和加速度,进而判断上自动扶梯时,需要移动的速度,避免自身移动速度与电梯速度差距过大,影响站立,且可以判断电梯是否到达终点层位置,以确定自身下扶梯速度。
根据本申请的一个实施例,机器人躯干四周设有与控制系统电连接的超声波传感器和红外防跌落传感器以获取障碍物、自动扶梯的方位以及距离,进而可以根据实际情况判断周围的环境,以使自身能够安全的精准到达目的地。
根据本申请的一个实施例,机器人本体内设有电源,当电源电压低于预设值,广告机器人进入充电模式。当电源电压高于预设值,广告机器人进入工作模式。以实现机器人主动的持续的工作。
优选地,机器人头部设有语音交互麦克风组,机器人控制系统还包括用于获取语音指令、并将语音指令与预存的语音指令模板进行比对的语音交互模块,语音交互模块电连接机器人控制系统和语音交互麦克风组。
根据本申请的一个实施例机器人头部设有第一喇叭,机器人躯干设有第二喇叭,分别用于语音播报。
需要说明的是,本申请实施例提供的机器人与上述方法相对应,上述方法的实施细节同样适用于上述机器人,本申请实施例不再对上述机器人进行详细说明。
由此,根据本申请实施例的自动扶梯机器人的广告投放方法及装置,在商超相对封闭的自动扶梯上下行过程中,能够针对商场顾客的特征,选择性地播放顾客感兴趣的广告,吸引顾客,从而为商家带来客源。
根据本申请实施例自动扶梯机器人的广告投放方法及装置的其他结构和操作对于本领域技术人员而言都是可以理解并且容易实现的,因此不再详细描述。
以上所述是本申请的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本申请所述原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本申请的保护范围。
- 自动扶梯机器人的广告投放方法及装置
- 一种广告投放的方法、装置及广告机器人