自动抽梗分梗装置及方法
文献发布时间:2023-06-19 11:52:33
技术领域
本发明涉及烟草加工领域,尤其涉及一种自动抽梗分梗装置及方法。
背景技术
在卷烟制造工序中,对于物料进行相关检测是极为重要的一环,例如需要对同一批次内的烟叶进行含梗率检测,而为了实现含梗率检测需要在检测前对烟叶进行抽梗分梗处理。
目前多采用如下两种方法进行抽梗分梗操作:
(一)打叶法
该方法是采用较为占具空间的打叶风分设备,将待测烟叶样品打碎至较小粒度,再通过风分箱将打碎的烟片和烟梗进行分离,最后由人工收集烟梗后采用多层筛分装置筛分出粗梗和细梗。
而在烟草工业对工艺质量指标检测、控制实时性、在线性和准确性等要求越来越高的背景下,该方法凸显以下不足:(1)打碎操作相对较为“粗暴”,可能导致造碎的烟片和烟梗过于零散,影响梗叶分离效果;(2)被破坏的检测样品难以回掺至原配方继续使用,增大原料消耗;(3)使用该方法处理后进行含梗率检测,其检测结果受打叶参数、风分参数、筛分参数等诸多因素的稳定性影响,尤其是收集及筛分粗细梗的过程也容易受到人工操作影响;(4)设备结构复杂,维护工作繁琐。
(二)手撕法
该方法是通过人工手撕将叶梗分离,然后人工采用卡尺等工具,区分出不同粗细的烟梗。相比前述打叶法,该方法相对更为精细,且避免了因造碎过程而丢失掉一部分应当用于含梗率计算的可用烟梗。但是,该方法的不足之处则在于人工效率较低且同样掺入人工影响因素,而且由于纯手工操作难免剥离不净,导致烟叶残留进而影响后续的检测。
发明内容
鉴于上述,本发明旨在提供一种自动抽梗分梗装置及方法,以综合解决现有抽梗分梗方式的不足之处。
本发明采用的技术方案如下:
第一方面,本发明提供了一种自动抽梗分梗装置,其中包括:
传送带、视觉定位部件、机械臂以及第一收集盒;
所述视觉定位部件以及所述机械臂分别设于所述传送带的预设处理区域,所述第一收集盒设于所述传送带的输送终点的一侧;
所述传送带用于将烟叶样品传送至所述预设处理区域;
所述视觉定位部件用于采集位于所述预设处理区域的烟叶样品的图像并向所述机械臂传输识别出的烟叶梗部定位信号;
所述机械臂上设有用于夹持烟叶样品的梗部的夹持机构、用于将烟梗和叶片分离的抽梗机构以及用于将完整烟梗切为烟梗段的分梗机构;
所述第一收集盒用于收集由所述机械臂切分后掉落的烟梗段。
在其中至少一种可能的实现方式中,所述视觉定位部件包括CCD相机。
在其中至少一种可能的实现方式中,所述第一收集盒内设有多个隔断部件,所述隔断部件将所述第一收集盒分为若干个容置空间,不同的容置空间用于放置不同直径区间的烟梗段。
在其中至少一种可能的实现方式中,所述装置还包括第二收集盒,用于收集由所述机械臂抽梗后掉落的叶片;
所述第二收集盒设于所述机械臂上或者与所述第一收集盒集于一体。
在其中至少一种可能的实现方式中,所述预设处理区域靠近所述输送终点。
在其中至少一种可能的实现方式中,所述装置还包括设于所述预设处理区域的烟叶感应部件,所述烟叶感应部件包括独立的光纤传感器或者与所述视觉定位部件集于一体。
在其中至少一种可能的实现方式中,所述装置还包括基座,所述传送带、所述视觉定位部件、所述机械臂以及所述第一收集盒均安装在所述基座上。
在其中至少一种可能的实现方式中,所述视觉定位部件包括支架,且所述支架的一端安装在所述基座上。
第二方面,本发明提供了一种相应于上述装置的自动抽梗分梗方法,其中包括:
驱动传送带将预处理后的烟叶样品运送至预设处理区域,其中,所述预处理包括在放置烟叶样品至传送带之前按预设的含水率进行烟叶回潮处理;
触发视觉定位部件采集位于预设处理区域的烟叶样品的图像并进行梗部识别定位;
接收烟叶梗部定位信号后,控制机械臂的夹持机构夹持烟叶样品的梗部;
控制机械臂的抽梗机构从该烟叶样品的烟梗的粗端向细端移动,将叶片从烟梗上剥离;
控制机械臂的分梗机构由抽出的完整烟梗的细端逆向移动至粗端,并在移动过程中将完整烟梗切分为若干烟梗段。
在其中至少一种可能的实现方式中,所述在移动过程中将完整烟梗切分为若干烟梗段具体包括:
在分梗机构逆向移动过程中,持续检测所述完整烟梗的直径;
基于预设的直径区间值,在所述完整烟梗的不同直径处,控制分梗机构切断烟梗,得到若干所述烟梗段。
本发明的构思在于构造一套由传送带、视觉定位部件、机械臂以及第一收集盒等多个组件结合的自动抽梗分梗装置架构,该装置中不同的组件各司其职且可以相互配合,以实现对烟叶样品的自动输送、识别定位、夹持抽梗分梗以及收集烟梗段等一系列服务于后续含梗率检测的操作。相比于现有技术,本发明可以在提升抽梗分梗效率的同时,提高叶梗分离的准确度,有效克服了打碎烟叶或手动抽梗分梗的诸多弊端,进而在显著改善抽梗分梗精度、提升操作处理效率的同时,还能够保留剥离后的完整叶片以进行资源再利用。
附图说明
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步描述,其中:
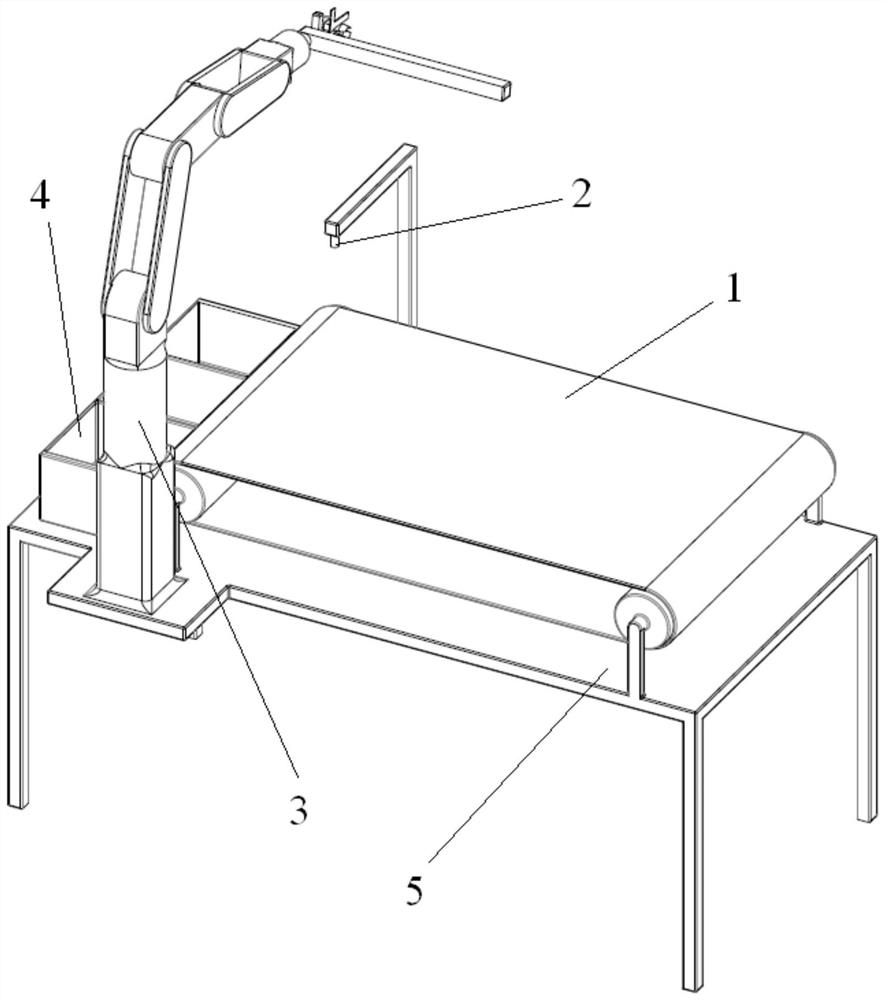
图1为本发明实施例提供的自动抽梗分梗装置的结构示意图;
图2为本发明实施例提供的自动抽梗分梗方法的流程图。
具体实施方式
下面详细描述本发明的实施例,实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能解释为对本发明的限制。
本发明提出了一种自动抽梗分梗装置的实施例,参照图1所示,具体可以包括如下部件:传送带1、视觉定位部件2、机械臂3以及第一收集盒4。其中,所述视觉定位部件2以及所述机械臂3分别设于所述传送带1的预设处理区域,所述第一收集盒4设于所述传送带1的输送终点的一侧。可以理解的是,这里提及的设于预设处理区域,并非是指所述视觉定位部件2以及所述机械臂3设于所述传送带1上,而是可以预先划定一个用于进行抽梗分梗操作的区域,当所述传送带1将烟叶样品传送至该预设处理区域时再进行抽梗分梗操作,可以理解的是,优选如图1示意的,将该预设处理区域设定在靠近传送带1的输送终点处,也即是使得机械臂3具有一个更为合理且不干扰周围其他环境的较佳操作范围。
具体来说,传送带1的驱动方式属于现有技术,可以按需对传送带1的速度进行调整,例如可以是匀速传送,并且需指出的是,如何驱动传送带1运转、如何控制传送带1的速度皆不是本发明的侧重点,可以在实施时借鉴已有的成熟技术,在实际操作中,传送带1的控制单元既可以是独立的,也可以是与视觉定位部件2和/或机械臂3集于一体,对此本发明可以不作限定和赘述。
关于所述视觉定位部件2,其作用是采集位于所述预设处理区域的烟叶样品的图像,并向所述机械臂3传输识别出的烟叶梗部定位信号,当然这图像采集并处理得到烟叶梗部定位信号已在本领域存在成熟的现有技术,这里涉及的图像处理过程,同样非本发明的侧重点,而需要说明的是,在实际操作中,所述视觉定位部件2可以有多种选型,例如但不限于该视觉定位部件2可包括工业CCD相机,分辨率可以采用0.2mm×0.2mm等,对此本发明不作限定。
进一步地,由于本发明提出是由传送带1将烟叶样品输送至预设处理区域,如图1所示,视觉定位部件2采集的图像中,该预设处理区域的背景是传送带1的带体,因而为了便于获得更为清晰的烟叶样品图像,以及便于精确识别定位到烟叶样品的烟梗,优选地,传送带可以选择与烟叶颜色(类黄色)和烟梗颜色(类黑色)形成明显反差色彩的材质,例如但不限于采用浅绿色PVC材质的传送带1的带体。
接续前文,所述机械臂3可以采用与机器人领域相关的现有技术,例如其可以多方向自由旋转、移动等,并且结合本发明场景,可以为其设置用于夹持烟叶样品的梗部的夹持机构、用于将烟梗和叶片分离的抽梗机构以及用于将完整烟梗切为烟梗段的分梗机构,以使得机械臂3实现夹持、抽梗、分梗的操作,同样需指出的是,机械臂(机器人)的控制方式属于成熟技术,并且可以按照实际所需对其附带的机械部件进行控制,因而如何驱动机械臂3旋转、移动、附带机构的运行等也不是本发明的侧重点,只要配置了相关的执行机构,便可以遵循现有的机器人控制技术实施本发明场景所需的动作,并且,还可以说明的是,机械臂3通常具有其控制单元,因而可以理解的是前述视觉定位部件2可以与机械臂3的控制单元信号连接,当然本发明也不排除将传送带1的驱动控制部件也与机械臂3的控制单元信号连接,或者,可以为上述组件独立配置其各自的控制单元,这些控制技术均有成熟方案供参考,因此本发明可以不作赘述和限定。
接着,关于所述第一收集盒4,其作用是收集由所述机械臂3切分后释放掉落的烟梗段,可以理解的是,在不同的场景中可能需要将剥离叶片的完整烟梗按预设的直径区间进行切分,所以该第一收集盒4在一些实施例中,如图1示例,可以内设有多个隔断部件,所述隔断部件将所述第一收集盒4分为若干个容置空间,不同的容置空间则可以用来收集不同直径区间的烟梗段,第一收集盒4也可以理解为是由多个独立的容置空间组成的。这里还需要指出的是,由于烟梗本身即具备直径变化的固有属性(梗部较粗且逐渐向叶端变细),所以如何按不同的直径区间进行分梗操作也可以有多种选择,例如机械臂3按既定的长度值将完整烟梗切断成若干烟梗段、也可以按既定的分段数切分、还可以更佳地按照直径测量值进行切分等,对此本发明不做限定。
而可以进一步补充的是,为了放置前述组件,可以考虑所述装置还包括图1示出的基座5,并且可将所述传送带1、所述视觉定位部件2、所述机械臂3以及所述第一收集盒4均安装在所述基座5上,该基座5起到了支撑各相关组件的作用。由此构思,还可以指出的是,前述视觉定位部件2还可以包含支架,并且所述支架的一端安装在所述基座5上,实施采集的视觉拾取部件则可以安装在所述支架的另一端且朝向传送带1的表面,更为具体地,朝向前述预设处理区域。
最后还可以补充两点:
其一、在将叶片从烟梗剥离后,可以考虑对剥离的叶片予以收集,也即是本发明通过自动控制的机械设备进行梗叶分离,相比传统的打叶法能够保证获得较为完整的叶片,因而可以考虑在所述装置中设计第二收集盒,用来收集由所述机械臂3抽梗后释放掉落的叶片,当然,第二手机盒可以设置在多个位置,例如但不限于将所述第二收集盒设于所述机械臂3上,或者也可以考虑将第二收集盒与所述第一收集盒4集于一体,在实际操作中可以将前述优选示例中所述第一收集盒的某一个容置空间作为所述第二收集盒。
其二、由于本发明的构思中,是要求传送带1需将烟叶样品输送至特定的预设处理区域才进行梗部识别、机器人抽梗分梗等操作,因而可以考虑如何实现使传送带1将烟叶样本运送到位,具体而言,可以通过既定传送带1的前进距离或者前进时间或者前进速度等,当然,从硬件角度考虑,还可以在所述预设处理区域处设置烟叶感应部件来监测传送带1上的烟叶样品,具体实现手段例如但不限于包括设置独立的光纤传感器,或者与所述视觉定位部件2集于一体,也即是将视觉定位部件2作为烟叶感应部件。这里涉及到的传感控制、光纤监测、图像检测等技术本身皆有大量成熟技术供参考,例如通过光纤传感器检测到传送带1上存在烟叶样品,则控制传送带1停止运转,以便后续图像采集、抽梗分梗等操作,这对于本领域技术人员来说并非难事。
由前文可知,上述装置实施例的提出仅是站位于硬件角度提供一套由传送带、视觉定位部件、机械臂以及第一收集盒等多个组件结合的自动抽梗分梗装置架构,该装置框架中不同的组件各司其职且可以相互配合,以实现对烟叶样品的自动输送、识别定位、夹持抽梗分梗以及收集烟梗段等一系列服务于后续含梗率检测的操作。这其中涉及的电气控制、图像识别算法、机器人操控等技术均可以借鉴现有技术,并且具体的机械臂执行的旋转、移动、夹持、抽梗、分梗等动作,也可以按实际应用所需,并结合成熟的机器人控制技术进行灵活配置。
综上所述,本发明相比于现有技术,本发明可以在提升抽梗分梗效率的同时,提高叶梗分离的准确度,有效克服了打碎烟叶或手动抽梗分梗的诸多弊端,进而在显著改善抽梗分梗精度、提升操作处理效率的同时,还能够保留剥离后的完整叶片以进行资源再利用。
基于上述各实施例及优选方案,本发明还提供了一种结合上述装置的自动抽梗分梗方法的实施例,如图2所示,具体可以包括如下步骤:
S1、驱动传送带将预处理后的烟叶样品运送至预设处理区域;
其中,所述预处理包括在放置烟叶样品至传送带之前按预设的含水率(例如15%~20%)进行烟叶回潮处理。
S2、触发视觉定位部件采集位于预设处理区域的烟叶样品的图像并进行梗部识别定位;
S3、接收烟叶梗部定位信号后,控制机械臂的夹持机构夹持烟叶样品的梗部;
S4、控制机械臂的抽梗机构从该烟叶样品的烟梗的粗端向细端移动,将叶片从烟梗上剥离;
S5、控制机械臂的分梗机构由抽出的完整烟梗的细端逆向移动至粗端,并在移动过程中将完整烟梗切分为若干烟梗段。
结合前文提及的按不同的直径区间得到多个烟梗段的构思,步骤S5所述的在移动过程中将完整烟梗切分为若干烟梗段可以具体包括:在分梗机构逆向移动过程中,持续检测所述完整烟梗的直径,然后基于预设的直径区间值,在所述完整烟梗的不同直径处,控制分梗机构切断烟梗,得到若干所述烟梗段。
举例来说,当分梗机构沿着完整烟梗从细端移动到预设的1.5mm(直径,可以预先按长度设定,也可以用测量手段实现,对此不作限定)时,则可以控制机械臂移动到第一收集盒的小于1.5mm的容置空间上,并触发分梗机构执行切断动作,将1.5mm以下烟梗剪切并释放掉落到该容置空间中。接着,分梗机构继续向粗端移动,当移动到预设的1.5mm-2.38mm直径区间时(这里的区间是指切割的烟梗段位于1.5mm-2.38mm这个直径范围,实际操作中,可以先从1.5mm处切断后,在移动到2.38mm处执行切断),按上述方式执行切断操作,并由第一收集盒获取到1.5mm-2.38mm烟梗剪切到对应的容置空间中,最后,机械臂移动到大于2.38mm烟梗收集盒,不执行切断操作,直接释放夹持机构,将大于2.38mm的烟梗段释放到对应的容置空间中。
以上仅是一种实施参考的示意,这里再结合更为具体的机械臂部件,进行如下说明,在夹持机构夹持到梗部后,分离机构可贴在烟梗的表面,从烟梗的粗端向细端移动同时将叶子剥离,接着分梗机构从细端处贴合完整烟梗的表面并向粗端移动,在移动过程中按烟梗属性既定的位移距离或者实时检测的直径值,一旦检测到已至预设位置(例如但不限于前述直径1.5mm处)则停止移动,并由机械臂整体移动到第一收集盒的对应位置后,控制分梗机构作出剪切动作,之后再继续移动,以此类推。
以上仅为实施示意,例如在其他示例中还可以按既定的另一种控制方式先将夹持了烟叶样品的机械臂整体移动至预设的第一个容置空间上方,然后再执行抽梗、分梗的操作,上述控制过程皆可按需配置,本发明对此不作限定。
本发明实施例中,“至少一个”是指一个或者多个,“多个”是指两个或两个以上。“和/或”,描述关联对象的关联关系,表示可以存在三种关系,例如,A和/或B,可以表示单独存在A、同时存在A和B、单独存在B的情况。其中A,B可以是单数或者复数。字符“/”一般表示前后关联对象是一种“或”的关系。“以下至少一项”及其类似表达,是指的这些项中的任意组合,包括单项或复数项的任意组合。例如,a,b和c中的至少一项可以表示:a,b,c,a和b,a和c,b和c或a和b和c,其中a,b,c可以是单个,也可以是多个。
以上依据图式所示的实施例详细说明了本发明的构造、特征及作用效果,但以上仅为本发明的较佳实施例,需要言明的是,上述实施例及其优选方式所涉及的技术特征,本领域技术人员可以在不脱离、不改变本发明的设计思路以及技术效果的前提下,合理地组合搭配成多种等效方案;因此,本发明不以图面所示限定实施范围,凡是依照本发明的构想所作的改变,或修改为等同变化的等效实施例,仍未超出说明书与图示所涵盖的精神时,均应在本发明的保护范围内。
- 自动抽梗分梗装置及方法
- 一种自动抽梗装置