非接触相位差式扭矩传感装置
文献发布时间:2023-06-19 11:52:33
技术领域
本发明涉及一种扭矩传感装置,尤其涉及一种非接触相位差式扭矩传感装置。
背景技术
电单车与目前国内理解的“电动自行车”最本质的区别在于,国内大多数所谓的电动自行车已经取消自行车的脚踏设计,变成了“电摩”,也就是“电动摩托车(ElectricMotorcycle)”,单纯使用电力作为动力来源,完全取代了人力。而电单车是“人力+电力”的混合运行模式,电力的加入不是为了取代人力,而是对人力进行加强,因此如果不踩脚踏,电力是无法单独驱动车辆前行的。另外电单车与“电摩”最大的一个区别在于,电单车从外观上几乎等同于自行车。并且电单车在断电或者关闭电源之后,就变成了一辆普通的自行车,仍然可以自由骑行。
现有的电助力车核心部件为力矩传感器,它可以去检测人力的输出力矩,然后调用电机输出力矩来辅助人力。衡量一套动力辅助系统是否足够优秀的标准就是“动力的输出是否符合使用者的力量需求”。人力输出大,动力输出相应提高,人力输出减小,动力输出也相应减少,动力总是随人力的变化而线性的变化,这样才能在骑行时达到最佳的动力辅助,同时最大化的利用好人力与电力,让人骑行变轻松,同时不浪费电力。但是由于力矩传感器装配在中轴上,中轴为一个旋转件,难以通过有线连接传感器的形式实现。应变片式扭矩传感器通过采集扭杆上的形变反应踩踏的扭矩变化,但是在应变片的贴设,以及信号传递方面存在着技术复杂的问题,成本较高。具体来说就是需要进行无线供电以及无线的信号传输。
发明内容
发明目的:本发明的目的在于提供一种可以实现转矩信号的非接触传递,在高转速下精确测距的相位差式扭矩传感装置。
技术方案:本发明的非接触相位差式扭矩传感装置,包括中轴、扭杆、输出端、传感器和至少两个光栅;
所述中轴用于连接踏板,作为动力输入端。
所述扭杆套设在中轴上,扭杆的一端与输出端连接;
所述至少两个光栅分别间隔设置在扭杆上;
每两个所述光栅对应设置一个传感器,用于检测光栅之间的相位差。
进一步地,所述光栅包括输入侧光栅和输出侧光栅,所述输入侧光栅设置在扭杆与中轴连接部分上;所述输出侧光栅设置在扭杆与输出端连接部分上;
进一步地,所述输入侧光栅的一侧设有备用光栅。
进一步地,所述输出端包括离合器、齿轮组和牙盘;所述离合器的一端与扭杆连接,另一端与齿轮组连接,齿轮组与牙盘连接。
进一步地,所述输出端包括牙盘;所述牙盘与扭杆连接。
进一步地,所述扭杆内部设置有花键,中轴外部也设置有花键,扭杆套设在中轴上通过花键连接。
进一步地,所述扭杆上设有传感器保持架,所述扭杆与保持架可以相对转动,所述传感器设置在传感器保持架上。
一种设有所述的非接触相位差式扭矩传感装置的电机前置助力自行车。
一种设有所述的非接触相位差式扭矩传感装置的扭矩中置电机助力自行车。
一种设有所述的非接触相位差式扭矩传感装置的电机后置助力自行车。
有益效果:与现有技术相比,本发明具有如下显著优点:
(1)相较于传统的相位差传感器采用的是齿轮,本发明的非接触相位差式扭矩传感装置使用光栅代替齿轮,实现了无接触式测量,精度高,信号传递简便。
(2)与应变片式扭矩传感器相比,无需进行无线供电以及无线的信号传输,技术简化,成本较低。
(3)本发明的非接触相位差式扭矩传感装置应用领域广泛,可以完美契合于中轴传感器前置自行车、扭矩中置电机助力自行车、电机后置助力自行车等各类自行车。
附图说明
图1为本发明扭矩传感装置的结构示意图;
图2为本发明扭矩传感装置的立体图;
图3为本发明扭杆与光栅位置关系的剖视图;
图4为本发明扭矩传感装置采用三个光栅的结构示意图;
图5为本发明扭矩传感装置应用于后置电机的车辆的示意图;
图6为本发明扭矩传感装置应用于前置电机的车辆的示意图;
图7为本发明扭矩传感装置应用于中置电机的车辆的示意图。
具体实施方式
下面结合附图对本发明的技术方案作进一步说明。
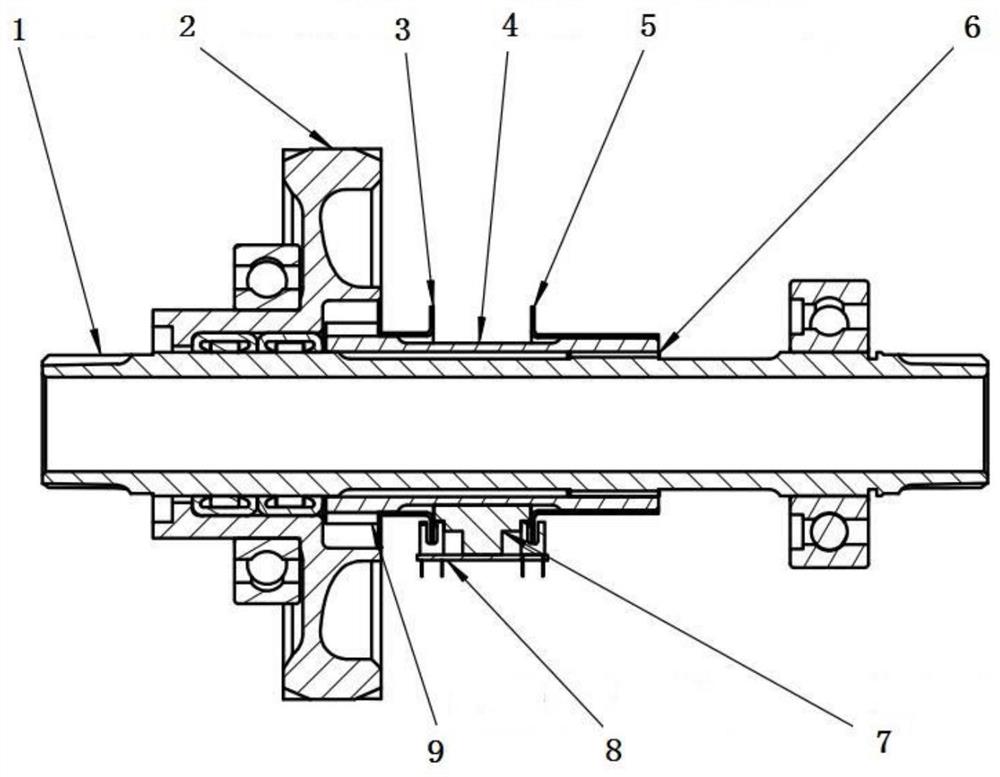
如图1、图2所示,本发明的非接触相位差式扭矩传感装置包括中轴1、扭杆4、输入侧光栅5、输出侧光栅3、输出端和传感器8;中轴1两端分别设有踏板,作为动力输入端;如图2所示,扭杆4分为两个部分,一个部分通过花键与中轴1连接,另一个部分与输出端连接。与中轴1连接的部分上设置有输入侧光栅5,与离合器9或其他输出部分设置有输出侧光栅3。传感器8与输入侧光栅5、输出侧光栅配合3,用于检测输入侧光栅5和输出侧光栅3的相位差。
当本装置应用于中置电机中,输出端包括离合器9以及齿轮组2,动力通过离合器9传递给齿轮组2,齿轮组2与中置电机外侧牙盘连接,将动力输出。其中离合器9单向将动力传递给外部,同时阻断外部动力传递给中轴1,以免影响踏板工作,造成中轴1带着踏板转动,造成使用者受伤。
本发明的工作流程如下:人力踩踏踏板,将动力传递给中轴,此时由于扭杆与中轴通过花键连接,故此扭杆又将力传递给牙盘,进而传递给链条将车辆带动。
当本装置应用于中置电机中时,扭杆将动力传递给离合器,之后传递给齿轮组,进而传递给牙盘,最终通过链条传递给动力轮。
在扭杆传动的时候会发生形变,造成编码盘分别在输出侧和输入侧的光栅采集的信号异步,具体来说就是产生相位差,而这种相位差通过编码盘进行捕捉,进而得到具体的参数,这个参数可以反映扭杆的形变情况,将其转为电信号,用于电机控制。
当踩踏踏板时,力会按照中轴、扭杆、外部输出装置(当扭杆与牙盘连接就是牙盘,与中置电机内离合连接时就是离合,最终都会传递给外部的动力轮)的顺序进行传递。此时扭杆会发生形变,在扭杆上间隔设置的输出侧和输入侧光栅就会产生相对的转动,此时两侧的光电信号存在相位差,以此来判断踩踏力度的大小。
相位差时扭转传感器就是扭转角相位差式传感器,它的原理就是根究磁电相位差式转矩测量技术,才弹性轴的两端安装两组齿数、形状及安装角完全相同的齿轮,齿轮外侧安装接近传感器。当弹性轴旋转时,两组传感器的波形产生相位差,从而计算出扭矩。它的特点主要是实现了转矩信号的非接触传递,检测的信号是数字信号,转速较高。本申请中正是利用这种非接触的特点才来采集扭矩,为电机控制提供支持。
如图4所示,传感器分别采集三个光栅的相位差,相互比较得到相邻的两两差值,通过差值的比较可以得到扭矩是否在扭杆上均匀分配,反馈扭杆是否因外力过大造成塑性形变。三个光栅同时可以使用两个一个留作备用,当其中一个损坏时开启,保证设备正常运转。
图5至图7分别为非接触相位差式扭矩传感装置应用于后置电机助力自行车、前置电机助力自行车和中置电机自行车的实例。
本发明的传感器具体应用场景包括但不限于中轴传感器的前置、后置电机助力自行车,以及扭矩中置电机助力自行车。
- 非接触相位差式扭矩传感装置
- 非接触相位差式扭矩传感器