一种生物样品全自动封装装置
文献发布时间:2023-06-19 11:54:11
技术领域
发明涉及真空保藏技术领域,尤其涉及一种生物样品全自动封装装置。
背景技术
许多不稳定的生物和化学样品需要在真空干燥下保存,如真菌、活性蛋白等等。
目前在对样品进行真空干燥保存时,将玻璃容器在真空状态下通过火焰熔融封口较常规材料的真空密封能保持更长期的气密性,特别是冷冻干燥后真空熔封的生物和化学样品可以在4℃冰箱甚至常温下长期保存而不变质和失活。
但是,目前实验室这类玻璃容器分装样品的真空熔封由于缺乏相应的设备而只能采用手工方法,需要熟练的玻璃工进行操作,设计不合理。
发明内容
有鉴于此,有必要提供一种生物样品全自动封装装置,解决现有技术中需要通过人手工对装有样品的玻璃容器进行真空熔封的技术问题。
为达到上述技术目的,发明的技术方案提供一种生物样品全自动封装装置,包括:
旋转机构,所述旋转机构用于夹持试管并可驱使所述试管绕自身轴线转动,所述旋转机构形成有与被夹持的所述夹持试管相连通的气道通路;
气压机构,所述气压机构连接于所述旋转机构并经所述气道通路与被夹持的所述试管相连通,用于向所述试管施加正压或者负压;
熔封机构,所述熔封机构相对所述旋转机构上被夹持的所述试管设置,用于对旋转的所述试管进行加热软化;
夹持臂机构,所述夹持臂机构活动设于被夹持的所述试管的一侧,用于拉伸受热软化所述试管。
进一步的,所述旋转机构包括旋转单元,所述旋转单元可绕自身轴线转动,所述旋转单元沿轴向开设有所述气道通路,所述旋转单元的一端与所述试管的开口端可拆卸连接,且所述气道通路的一端与被夹持的所述试管相连通;
所述气压机构与所述气道通路的另一端相连通;
所述熔封机构对所述试管进行加热的一端可沿靠近或者远离所述试管的方向移动;
所述夹持臂机构还可以将试管朝靠近所述旋转机构的方向传输并供所述旋转机构夹持所述试管。
进一步的,所述旋转机构包括固定架、磁流体旋转密封件、驱动单元及夹持套,所述磁流体旋转密封件的空心转轴可转动连接于所述固定架,所述驱动单元连接于所述空心转轴和所述固定架,用于驱动所述空心转轴绕自身轴线转动,所述夹持套连接于所述空心转轴,用于夹持所述试管。
进一步的,所述驱动单元包括第一电机、第一带轮、皮带,所述第一电机固定于所述固定架,所述第一带轮固定套设于所述第一电机的输出轴,所述皮带的两侧分别套设于第一带轮和所述空心转轴。
进一步的,所述气压机构包括连接管、真空发生器及空气压缩器,所述连接管的一端与所述空心转轴相连通,所述真空发生器的进气端和所述空气压缩器的出气端可选择性的与所述连接管的另一端相连通。
进一步的,所述夹持套具有弹性,所述夹持套远离所述空心转轴的一端为波形管。
进一步的,所述夹持臂机构包括所述夹持单元包括两个夹持件和夹紧件,两个所述夹持件间隔设置,所述夹紧件分别连接于两个所述夹持件,用于驱动两个所述夹持件张开或者合拢。
进一步的,所述夹持件包括夹持臂和两个固定柱,所述夹持臂相对另一所述夹持件的一侧开设有两个相互平行的凹槽,所述固定柱与所述凹槽一一对应设置,所述固定柱的一侧嵌设于所述凹槽并连接于所述夹持臂。
进一步的,所述生物样品全自动封装装置还包括支架,所述夹持臂机构还包括X轴运动组件、Y轴运动组件与Z轴运动组件,所述X轴运动组件的固定部固定于所述支架,所述X轴运动组件的移动部可相对固定部沿X轴方向移动,所述Y轴运动组件的固定部固定于所述X轴运动组件的移动部,所述Y轴运动组件的移动部可相对所述Y轴运动组件的固定部沿Y轴方向移动,所述Z轴运动组件的固定部固定于所述Y轴运动组件的移动部,所述Z轴运动组件的移动部可相对所述Z轴运动组件的固定部沿Z轴方向移动,所述夹紧件连接于所述Z轴运动组件的移动部。
进一步的,所述生物样品全自动封装装置还包括试管盒机构,所述试管盒机构包括壳体和第一固定板,所述壳体的内部空心且一端开口,所述第一固定板固定内置于所述壳体,所述第一固定板的顶部开设有多个第一固定孔,多个所述第一固定孔相互平行且间隔设置,所述第一固定孔包括多个相互平行且间隔设置的盲孔,所述第一固定板的底部开设有多个第一条形槽和连通多个第一条形槽的第二条形槽,所述第一条形槽与所述第一固定孔依次交替分别。
与现有技术相比,发明的有益效果包括:通过旋转机构驱使试管转动,通过气压机构对试管施加负压,使得试管内部真空,通过熔封机构对试管进行加热,使得试管受热熔化,通过夹持臂机构夹紧受热的试管并拉伸试管,使得试管熔断成两截,实现了试管内的样品的真空密封,且无需人手工去对试管进行高温真空密封。
附图说明
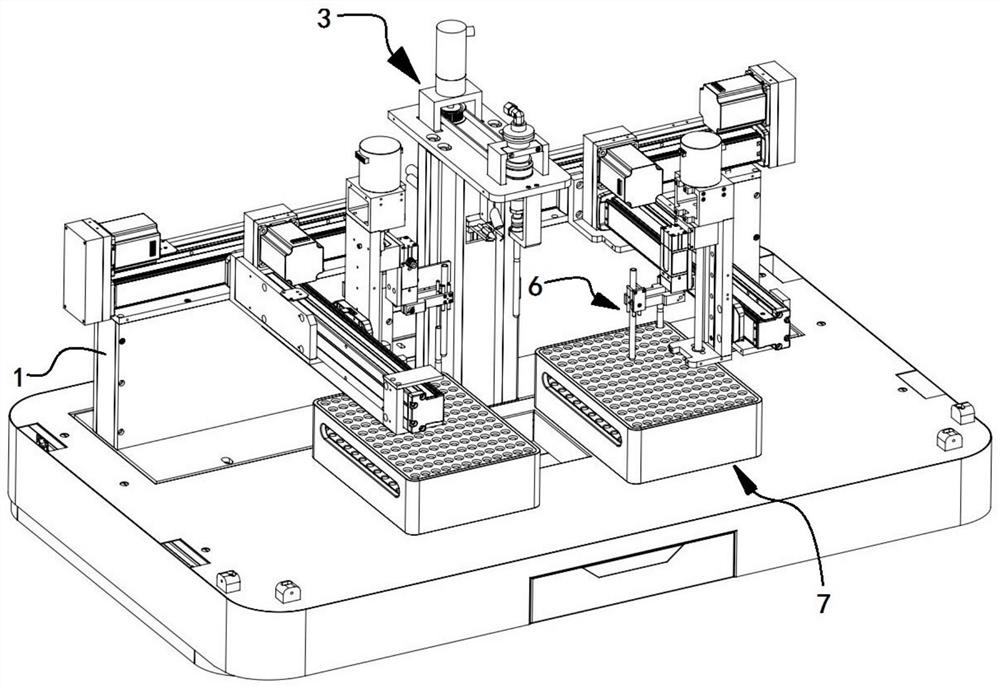
图1是发明所述的生物样品全自动封装装置的立体图;
图2是发明所述的生物样品全自动封装装置另一视角的立体图;
图3是图2中A处的局部放大示意图;
图4是发明所述的生物样品全自动封装装置中熔封机构和夹持臂机构的立体图;
图5是发明所述的生物样品全自动封装装置中熔封机构和夹持臂机构的结构示意图;
图6是沿图5中B—B线的剖视图;
图7是图6中C处的局部放大示意图;
图8是图6中D处的局部放大示意图;
图9是本发明所述的生物样品全自动封装装置中气压机构的结构示意图;
图10是本发明所述的生物样品全自动封装装置中试管盒机构的立体图;
图11是本发明所述的生物样品全自动封装装置中第一固定板和第二固定板的立体图。
具体实施方式
下面结合附图来具体描述发明的优选实施例,其中,附图构成本申请一部分,并与发明的实施例一起用于阐释发明的原理,并非用于限定发明的范围。
发明提供了一种生物样品全自动封装装置,如图1至11所示,包括支架1、试管2、旋转机构3、气压机构4、熔封机构5及夹持臂机构6,试管2沿径向方向绕外周面开设有环形槽。
当试管2的壁厚较大时,可以在试管2的中部开设环形槽,对于壁厚较小的试管2,无需在试管2的中部开设环形槽。
其中,环形槽位于试管2的中部,试管2的材质可以为玻璃管、石英管、高硼酸玻璃管等。
通过开设环形槽,当试管2在高温和内部负压的作用下,环形槽的内部率先向中部收缩,使得拉伸试管2时,试管2从中部分割成两截,设置环形槽后便于试管2封口且封口的位置位于试管2的中部。
旋转机构3用于夹持试管2并可驱使试管2绕自身轴线转动,旋转机构3形成有与被夹持的夹持试管2相连通的气道通路。
于本实施例中,旋转单元可绕自身轴线转动,旋转单元沿轴向开设有气道通路,旋转单元的一端与试管的开口端可拆卸连接,且气道通路的一端与被夹持的试管2相连通。
于本实施例中,旋转机构3包括固定架31、旋转单元、驱动单元33及夹持套34,固定架31连接于支架1,旋转单元为磁流体旋转密封件32,磁流体旋转密封件32的空心转轴321可转动连接于固定架31,驱动单元33连接于空心转轴321和固定架31,驱动单元33用于驱动空心转轴321绕自身轴线转动,夹持套34连接于空心转轴321,夹持套34用于夹持试管2。
于本实施例中,驱动单元33包括第一电机331、第一带轮332、皮带333,第一电机331固定于固定架31,第一带轮332固定套设于第一电机331的输出轴,皮带333的两侧分别套设于第一带轮332和空心转轴321。
通过设置驱动单元33,驱动单元33驱使空心转轴321沿绕自身轴线转动,通过转动的空心转轴321带动试管2绕自身轴线旋转。
其中,夹持套34具有弹性,夹持套34为带有波形管的真空吸盘,夹持套34远离空心转轴321的一端为波形管。
于本实施例中,旋转机构3还包括L形板35,L形板35的一直角边连接于固定架31并与固定架31相互垂直设置,L形板35的另一直角边相对空心转轴321设置,L形板35的另一直角边相对空心转轴321开设有导向孔,导向孔包括依次连接的锥形孔、第一圆孔和第二圆孔,锥形孔沿靠近第一圆孔的方向内径不断减小,第一圆孔的内径大于试管2的外径,第二圆孔相对锥形孔靠近空心转轴321,且第二圆孔的内径大于第一圆孔的内径。
其中,空心转轴321通过匚型板36连接于固定架31,具体的,匚型板36相对空心转轴321开设有贯穿孔,匚型板36经贯穿孔可转动套设于空心转轴321并固定连接于固定架31。
气压机构4连接于旋转机构4并经气道通路与被夹持的试管2相连通,用于向试管2施加正压或者负压。
于本实施例中,气压机构4与气道通路的另一端相连通。
于本实施例中,气压机构4包括连接管41、真空发生器42及空气压缩器43,连接管41的一端与空心转轴321相连通,真空发生器42的进气端和空气压缩器43的出气端可选择性的与连接管41的另一端相连通。
其中,连接管41与可转动的磁流体旋转密封件32的空心转轴321相连通为现有技术,在本申请中不做过多阐述。
其中,气压机构4还包括第一连通管44、第一气管接头45、第二气管接头46、第一导通组件47及第二导通组件48,第一连通管44的一端与连接管41的另一端相连通,第一气管接头45具有相连通的三个开口,第二气管接头46具有相连通的三个开口,第一气管接头45的第一开口与第一连通管44的另一端相连通,第一导通组件47包括第二连通管471、第一电磁阀472及第一调速阀473,第二连通管471的一端与第一气管接头45的第二开口相连通、另一端与第二气管接头46的第一开口相连通,第一电磁阀472和第一调速阀473均安装于第二连通管471,第二导通组件48包括第三连通管481、真空过滤器482、气压传感器483、第三气管接头484、第四连通管485、第二电磁阀486及第二调速阀487,第三连通管481的一端与第一气管接头45的第三开口相连通,真空过滤器482的进气端与第三连通管481的另一端相连通,第三气管接头484具有三个开口,第三气管接头484的第一开口与真空过滤器482的出气端相连通、第二开口与真空发生器的进气端相连通、第三开口与气压传感器483的进气端相连通,第四连通管485的一端与真空发生器42的出气端相连通、另一端与第二气管接头46的第二开口相连通,第二电磁阀486和第二调速阀487均安装于第四连通管485,空气压缩器43的出气端与第二气管接头46的第三开口相连通。
通过设置第一调速阀473可以对通过第二连通管471的正压值进行调节,通过设置第二调速阀487可以对通过第四连通管485负压值进行调节。
熔封机构5相对旋转机构3上被夹持的试管2设置,用于对旋转的试管2进行加热软化。
于本实施例中,熔封机构5对试管进2行加热的一端可沿靠近或者远离试管2的方向移动。
于本实施例中,熔封机构5包括支撑柱51、加热组件52、直线驱动组件53,加热组件52用于对试管2进行加热,支撑柱51连接于支架1,固定架31设置于支撑柱51的上方并连接于支架1,支撑柱51开设有安装孔,直线驱动组件53的固定于支撑柱51,直线驱动组件53的移动部连接于加热组件52,直线驱动组件53用于驱动加热组件52移动。
其中,加热组件52为激光加热器、高频加热器、火焰加热器、电热丝、PTC陶瓷、氮化硅加热片及PTC陶瓷片等等,于本实施例中,加热组件52为火焰枪,通过喷射火焰的方式对试管2进行加热,转动的试管2可被加热组件52均匀加热。
其中,加热组件2可以通过喷射火焰的方式对试管2进行加热,还可以设置呈圆环形、“C”型的电热丝对试管2进行加热。
通过设置直线驱动组件53,可以火焰枪与待加热的试管2之间的距离,包装火焰的外焰与试管2之间的距离适当。
于本实施例中,熔封机构5还包括两个电子点火组件54,两个电子点火组件54分别设置于加热组件52的两侧并相对加热组件52的喷焰口设置,电子点火组件54用于加热组件52的点火。
于本实施例中,熔封机构5还包括温度传感器55,温度传感器55连接于固定架31并相对旋转的试管2的凹槽设置。
通过设置温度传感器55,可以检测试管2的实时温度,当试管2被加热到一定的温度后,即可拉伸试管2。
夹持臂机构6活动设于被夹持的试管2的一侧,用于拉伸受热软化试管2。
于本实施例中,夹持臂机构6还可以将试管2朝靠近旋转机构3的方向传输并供旋转机构3夹持试管2。
其中,夹持臂机构6可以夹持试管2上下料并可拉伸受热的试管2。
其中,夹持臂机构6的数量可以为一个、两个、三个等,于本实施例中,夹持臂机构6的数量为两个,两个夹持臂机构6相对设置于空心转轴321的两侧。
于本实施例中,夹持臂机构6包括夹持单元61,夹持单元61包括两个夹持件611和夹紧件612,两个夹持件611间隔设置,夹紧件612分别连接于机械臂61和两个夹持件611,夹紧件612用于驱动两个夹持件611张开或者合拢。
其中,夹紧件612可以为电动夹持爪或者气动夹持爪,夹紧件612驱动两个夹持件611张开或者合拢的夹紧件612为本领域的技术人员所熟知的现有的装置,在本申请中不做过多阐述。
夹紧件612可以控制两个夹持件611施加给试管2的夹紧力。
于本实施例中,夹持件611包括夹持臂6111和两个固定柱6112,夹持臂6111相对另一夹持件611的一侧开设有两个相互平行的凹槽,固定柱6112与凹槽一一对应设置,固定柱6112的一侧嵌设于凹槽并连接于夹持臂6111。
通过设置两个固定柱6112,通过两个夹持件611夹持试管2后,试管2位于四个固定柱6112组成的区域内,空心转轴321驱使试管2转动时,试管2被四个固定柱6112夹紧,夹持件611夹住试管2后能避免试管2的底部转动。
其中,固定柱6112的外壁上套设有缓冲胶圈(图中未示出),缓冲胶圈与固定柱6112一一对应设置。
通过设置缓冲胶圈,能保持固定柱6112夹持试管2时的力度且能避免固定柱6112夹伤试管2。
于本实施例中,夹持臂机构6可以为机械臂、机械手及三维移动平台等,于本实施例中,夹持臂机构6还包括X轴运动组件62、Y轴运动组件63与Z轴运动组件64,X轴运动组件62的固定部固定于支架1,X轴运动组件62的移动部可相对固定部沿X轴方向移动,Y轴运动组件63的固定部固定于X轴运动组件62的移动部,Y轴运动组件63的移动部可相对Y轴运动组件63的固定部沿Y轴方向移动,Z轴运动组件64的固定部固定于Y轴运动组件63的移动部,Z轴运动组件64的移动部可相对Z轴运动组件64的固定部沿Z轴方向移动,夹紧件612连接于Z轴运动组件64的移动部。
其中,X轴运动组件62、Y轴运动组件63与Z轴运动组件64均可以为气缸、液压缸、电动推杆等,于本实施例中,X轴运动组件62为电动推杆,Y轴运动组件63为电动推杆,Z轴运动组件64为丝杆螺母加导轨滑块及驱动电机,驱动电机和导轨均连接于Y轴运动组件63的移动部,螺母螺纹连接于丝杆,滑动部可滑动连接于导轨和螺母,夹紧件612连接于Z轴运动组件64的滑块,其中,通过丝杆螺母、导轨滑块、驱动电机驱动部件移动为现有技术,在本申请中不做过多阐述。
于本实施例中,生物样品全自动封装装置还包括试管盒机构7,试管盒机构7包括壳体71和第一固定板72,壳体71的内部空心且一端开口,第一固定板72固定内置于壳体71,第一固定板72的顶部开设有多个第一固定孔,多个第一固定孔相互平行且间隔设置,第一固定孔包括多个相互平行且间隔设置的盲孔。
其中,生物样品全自动封装装置还包括第二固定板73,第二固定板73设置于第一固定板72的上方并连接于壳体71,第二固定板73相对盲孔开设有多个通孔,通孔与盲孔一一对应设置。
通过设置第二固定板73,能对试管2的中上部进行固定,避免试管2晃动或者倾斜。
于本实施例中,第一固定板72的底部开设有多个第一条形槽和连通多个第一条形槽74的第二条形槽75,第一条形槽74与第一固定孔依次交替分别。
于本实施例中,第一固定板72的顶部还开设有与第一条形槽74相连通的注液孔。
通过设置第一固定板72并在第一固定板72上开设盲孔,将试管2插设于盲孔后即可实现试管2的固定,然后向注液孔内注入冷却液,冷却液经注液孔流入第一条形槽74和第二条形槽75,使得位于盲孔内的试管2长时间保持低温冷藏,保持内部样品的活性。
其中,试管盒机构7的数量可以为一个、两个、三个等,于本实施例中,试管盒机构7的数量为两个,两个试管盒机构7对称设置于空心转轴321的两侧。
本发明的具体工作流程:ccd拍照或扫描系统对装好的试管2的试管盒机构7块进行高清拍摄或扫描,对图片进行分析和处理,对每个圆形孔中心生成坐标路径,然后启动夹持臂机构6,在X轴运动组件62、Y轴运动组件63与Z轴运动组件64的作用下,驱动夹持单元61移动至相对应的试管2处,通过夹紧件612驱动两个夹持件611夹紧试管2,两个夹持件611的夹持臂6111相互靠拢直至夹持住试管2,此时,试管2位于四个固定柱6112合围形成的区域内,然后通过X轴运动组件62、Y轴运动组件63与Z轴运动组件64将试管2移动至空心转轴321的下方并使得试管2经导向孔穿过L形板35,直至试管2插入夹持套34。
启动真空发生器42,开启第二电磁阀486并关闭第一电磁阀472,真空发生器42经连接管41、第一连通管44、第一气管接头45、第三连通管481、真空过滤器482将将试管2内抽至真空,抽出的气体经第四连通管485、第二气管接头46排出。
试管2内抽至真空的过程中,会施加给试管2负压的吸力,使得试管2被吸紧在空心转轴321上,然后通过驱动单元33驱使空心转轴321转动,空心转轴321带动试管2转动,启动加热组件52,并通过电子点火组件54对火焰枪点火,火焰枪喷出高温的火焰,通过高温的火焰对试管2进行加热,使得试管2软化,然后通过夹持臂机构6夹紧试管2,试管2的底部被夹紧后试管2的顶部与继续转动,使得试管2被加热的区域扭转形变,使得试管2的被加热的区域呈螺旋状粘接在一起,然后通过夹持臂机构6夹持试管2向远离空心转轴321的方向移动,直至试管2在被加热点处被拉断,实现了装有样品的试管2的真空密闭,通过夹持臂机构6将封闭后的试管2移动至试管盒机构7上,并使得试管2穿过通孔并插设于第一固定板72的盲孔内,实现了试管2固定于试管盒机构7。
将受热软化的试管2拉成两截后,空心转轴321上还吸附有试管2的上半截,此时,关闭第二电磁阀486和真空发生器42并开启第一电磁阀472,试管2失去承受的负压吸力,启动空气压缩器43将高压气体经第二气管接头46和第二连通管471、第一气管接头45、第一连通管44、连接管41输入空心转轴321内,在高压气体的作用下,将固定于夹持套34上的试管2吹落,去除熔封后产生的废料。
以上所述,仅为发明较佳的具体实施方式,但发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在发明的保护范围之内。
- 一种生物样品全自动封装装置
- 一种提高样品检测精度和准确性的生物样品采集方法、装置、系统、生物样品稳定试剂及应用