基于六自由度机械臂的果蔬采摘机
文献发布时间:2023-06-19 11:54:11
技术领域
本发明属于智能农机技术领域,特别是一种基于六自由度机械臂的果蔬采摘机。
背景技术
我国水果生产中,仍大量采用人工采摘,不但采摘效率低,人员劳动强度大,而且对于规模种植基地来说,采摘成本太高。
为解决水果人工采摘效率低、人工成本高的问题,出现了大量中水果采摘设备。
中国发明专利申请“一种基于直角坐标式机械臂的水果采摘机器人”(申请号:202011100614.9,公开日:2021.1.22)公开了一种水果采摘机器人,其包括车架、行驶系统、工控机、直角坐标式机械臂、图像识别系统以及末端执行器等。采用平面直角坐标定位方式对目标果实进行定位采摘,通过将果实图像投影于相应面域内,计算出相应的X、Y、Z轴坐标,再采用直角坐标式机械臂采摘果实,减少机械臂的自由度,使得机械臂采摘路径更为简便,进而使得自动采摘果实的程序算法即简洁又稳定。通过合理的设计直角坐标式机械臂,使得机器人能更加适应采摘任务,进而使得采摘程序算法更加兼容机器人。并且该机器人装有GPS导航系统,在果园内作业时能实现全自主导航行驶实现了全自动对果实的采摘作业,工作效率高,结构简单,维修装配方便。由于采摘定位采用平面直角坐标定位方式,上述水果采摘机器人相比于本发明存在定位不够准确,反应时间较长等问题。
又如,中国发明专利申请“一种智能水果采摘机器人”(申请号:202011411527.X,公开日:2021.3.26)公开了一种水果采摘机器人,其包括:底座,下臂,上臂,夹持器、图像采集装置以及控制装置,其中底座固定在行走机构上,下臂的一侧与下臂支座之间通过第一旋转轴驱动电机铰接,下臂支座通过回转机构设置于底座,下臂的另一侧通过第二旋转轴驱动电机与上臂的一侧铰接,上臂的另一侧设置有夹持器,夹持器包括夹持指和夹持指控制机构,控制机构与第一旋转轴驱动电机、第二旋转轴驱动电机和夹持指控制机构电连接。由于剪切机构和夹持机构不是一体,采摘过程效率不够高。
总之,现有技术存在的问题是:剪切与夹取的过程效率较低,定位的准确度不够等。
发明内容
本发明的目的在于提供一种基于六自由度机械臂的果蔬采摘机,采摘效率高,定位准确。
实现本发明目的的技术解决方案为:
一种基于六自由度机械臂的果蔬采摘机,其包括行走平台100、支撑模块200、收集箱500、4个运动模块300和4个末端执行器400;
所述4个运动模块300周向均布地固定安装在支撑模块200四角,所述4个末端执行器400各与一运动模块300的六自由度机械臂305末端固定连接,所述收集箱500固定设置在支撑模块200的顶板201上。
本发明与现有技术相比,其显著优点为:
1、采摘效率高:果蔬采摘机采用龙门式框架结构,整体结构成对称式分布,四个机械臂带动四个末端执行器进行采摘,工作效率高;末端执行器具有收集功能,减少了机械臂和末端执行器的将果蔬放入收集箱的时间,进一步提高其工作效率。
2、定位准确:果蔬采摘机采用六自由度机械臂,相对于直角坐标式机械臂自由度更高,能实现向目标位置的精确移动,定位更为准确。
3、工作范围宽:四个机械臂分布在移动平台的四个角落,龙门式框架受力均匀,活动空间大,工作范围宽。
下面结合附图和具体实施方式对本发明作进一步的详细描述。
附图说明
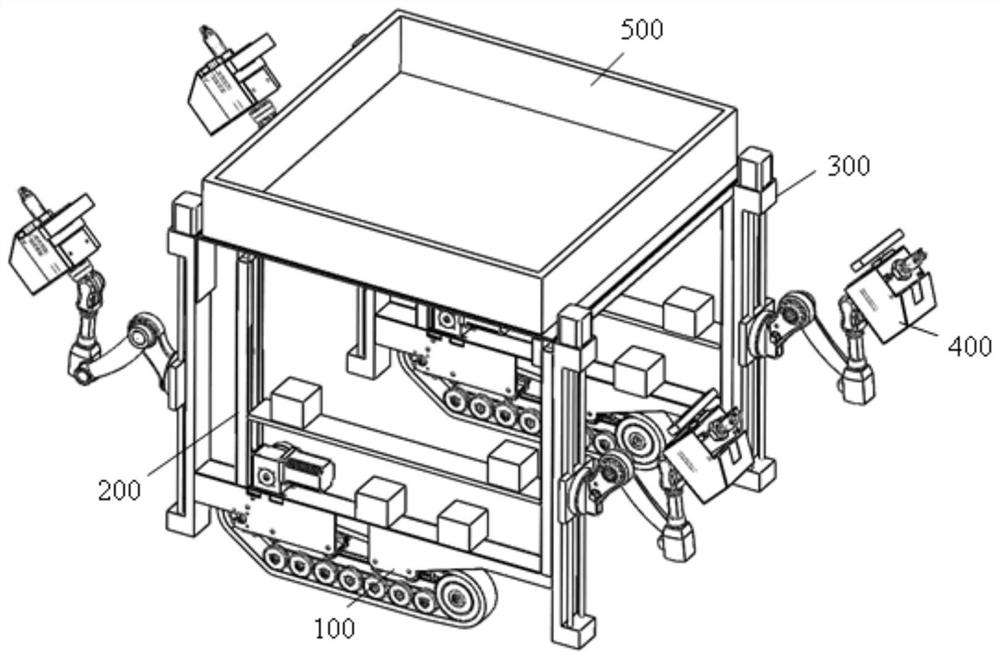
图1为本发明基于六自由度机械臂的果蔬采摘机的整体结构示意图。
图2为图1中行走平台的结构示意图。
图3为图1中支撑模块的结构示意图。
图4为图1中运动模块的结构示意图。
图5为图1中末端执行器的局部结构示意图。
图6为图5中末端执行器的另一视角局部结构示意图。
图7为图1中收集箱的结构示意图。
图8为图5中夹剪头梯形闭合面实施例的主视图。
图9为图5中夹剪头半圆形闭合面实施例的主视图。
图中:行走平台100、支撑模块200、运动模块300、末端执行器400、收集箱500、履带轮结构101、链轮传动结构102、第一电机103、底板104、减速机105、顶板201、顶端横梁202、直线模组安装板203、立柱204、短横梁205、隔板206、导轨301、第二电机302、丝杆303、滑台304、机械臂305、电源306、机械臂控制器307、L型安装板401、支架402、末端执行器顶板403、支撑座404、摄像头405、固定支架406、第一电动推杆407、气动剪支架支撑座408、电机连接板409、末端电机410、气动剪支架411、气动剪本体412、夹剪头413、U形框414、电动推杆安装板415、第二电动推杆416、连接座417、铰接头418。
具体实施方式
如图1所示,本发明基于六自由度机械臂的果蔬采摘机,其包括行走平台100、支撑模块200、收集箱500、4个运动模块300和4个末端执行器400;
所述4个运动模块300周向均布地固定安装在支撑模块200四角,所述4个末端执行器400各与一运动模块300的六自由度机械臂305末端固定连接,所述收集箱500固定设置在支撑模块200的顶板201上。
如图2所示,
所述行走平台100包括履带轮结构101、链轮传动结构102、第一电机103、底板104和减速器105;
所述链轮传动结构102的一端与所述履带轮结构101的输入轴连接,所述链轮传动结构102的另外一端与所述第一电机103的输出轴连接,所述第一电机103与所述减速器105相连,所述减速器105固定安装在所述底板104上。
如图3所示,
所述支撑模块200包括顶板201、2根顶端横梁202、4块直线模组安装板203、8根立柱204、8根短横梁205和2块隔板206;
所述2根顶端横梁202分别固定设置在所述顶板201下表面靠近前后沿,所述4块直线模组安装板203分别固定设置在所述顶板201的前后端靠近两侧,每2根所述立柱204竖向平行靠近,中间以间隔设置的2根短横梁205相连,形成一立柱对,4个立柱对分置于顶板201四角,上端与顶端横梁202下表面固定连接,相邻的前后两立柱对以隔板206固定连接;
所述立柱204下端与行走平台100的底板104上表面固定连接。
如图4所示,
所述运动模块300包括导轨301、第二电机302、丝杆303、滑台304、六自由度机械臂305、电源306和机械臂控制器307;
所述导轨301固定安装在一块直线模组安装板203上,所述第二电机302固定安装在所述导轨301上,所述丝杆303安装在所述导轨301内,所述滑台304安装在导轨301上,且与所述丝杆303形成在第二电机302的驱动下上下移动的螺旋副,所述六自由度机械臂305固定安装在所述滑台304上,所述电源306固定安装在所述隔板206上,所述机械臂控制器307固定安装在行走平台100的底板104上。
如图5、6所示,
所述末端执行器400包括L型安装板401、支架402、末端执行器顶板403、支撑座404、摄像头405、固定支架406、第一电动推杆407、气动剪支架支撑座408、电机连接板409、末端电机410、气动剪支架411、气动剪本体412、夹剪头413、U形框414、电动推杆安装板415、第二电动推杆416、连接座417和铰接头418;
所述L型安装板401固定安装在运动模块300的机械臂305上,所述支架402固定安装在所述L型安装板401上,所述末端执行器顶板403固定安装在所述支架402的上,所述支撑座404固定安装在所述末端执行器顶板403上,所述摄像头405固定安装在所述支撑座404之间,所述固定支架406通过螺栓固定安装在所述支架402上,所述第一电动推杆407的电机端固定安装在支架402上,第一电动推杆407的推杆端与所述气动剪支架支撑座408通过螺纹连接,所述气动剪支架支撑座408通过所述固定支架406与所述支架402滑动连接,所述电机连接板409固定安装在所述气动剪支架支撑座408上,所述末端电机410固定设置在所述电机连接板409上,所述气动剪支架411设置在所述气动剪支架支撑座408内,所述气动剪本体412固定设置在所述气动剪支架411上,所述电动推杆安装板415通过螺栓固定安装在所述支架402上,所述第二电动推杆416的电机端固定安装在所述电动推杆安装板415上,所述连接座417固定设置在所述U形框414上并与所述第二电动推杆416的推杆端相铰接,所述铰接头418固定安装在所述U形框414上通过销与所述支架402连接。
图7为收集箱的结构示意图。
优选地,如图8所示,所述夹剪头413闭合面为梯形闭合面,可实现先对果蔬的茎进行夹取,再对其进行剪切的动作。
优选地,如图9所示,所述夹剪头413闭合面为半圆形闭合面,也可实现先对果蔬的茎进行夹取,再对其进行剪切的动作。
夹剪头413闭合面形状还可以是矩形、三角形等形状。均能满足闭合面啮合时,剪切部分没有剪切,闭合后才会发生剪切。实现闭合线夹紧,剪刀剪切的功能。
本发明基于六自由度机械臂的果蔬采摘机的工作过程如下:
第一步,第一电机103驱动行走平台100移动使得果蔬采摘机横跨多行果蔬移动,
第二步,摄像头403识别待采摘果蔬的图像数据以定位采摘位置,
第三步,运动模块300及末端执行器400基于所述图像数据,将气动剪本体412移动至采摘果蔬处,所述夹剪头413同时实现剪断和夹取果蔬茎杆的功能,再由所述末端电机410带动所述气动剪支架411旋转,所述气动剪支架411转动到所述U形框406内,所述夹剪头413松开,果蔬掉落在所述U形框406里,
第四步,U形框414内果蔬收集已满时,所述第二电机302驱动所述丝杆303旋转运动,进而通过滑台304带动机械臂305运动至导轨301上端,所述机械臂控制器307控制机械臂305运动,使得末端执行器400在机械臂305的带动下到达收集箱500的上方。所述末端执行器400通过第二电动推杆416推动U形框414转动,使U形框414内的果蔬滑落至收集箱500中,完成收集。
本发明基于六自由度机械臂的果蔬采摘机,整体结构成对称式分布。运动模块通过电机驱动丝杆旋转运动带动滑台上下运动和六自由度机械臂的相互配合来实现末端执行器在各个方向上的运动。末端执行器通过摄像头识别可采摘的果蔬;通过第一电动推杆推动气动剪支架在固定支架中滑动从而实现气动剪的前后运动;通过末端电机带动气动剪支架转动,实现气动剪的剪切角度调整。气动剪能够同时实现剪切和夹取果蔬茎杆的功能,剪断果蔬茎杆后,再由末端电机带动气动剪支架转动,把果蔬放置在U形框内。通过运动模块使得末端执行器移动到收集箱的上方,第二电动推杆推动所述U形框转动,使U形框内的果蔬滑掉落至收集箱中,完成采摘。本发明结构紧凑,原理清晰,可以同时实现果蔬的采摘和运输,进一步提高了工作效率。
- 基于六自由度机械臂的果蔬采摘机
- 基于三坐标机械臂的果蔬自动采摘机