磁控胶囊机器人的磁耦合启动控制装置、系统及方法
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及自动化工程技术领域,具体而言,涉及一种磁控胶囊机器人的磁耦合启动控制装置、系统及方法。
背景技术
肠道疾病是人类的高发病症,全球仅腹腔疾病的患者数量就已达七千万例。肠道疾病、特别是位于小肠和结肠部分的疾病,对人类公共安全带来了较大危害。无线磁控胶囊机器人的出现是人口健康诊疗领域的重大突破,完全避免了传统插管检查的痛苦,相比传统内窥镜,磁控胶囊机器人提供了一种全新的无创解决方案,医生通过磁控胶囊机器人获得病变组织信息,进行肠道疾病诊断,具有广阔的应用前景。被动磁控胶囊机器人利用消化道蠕动的方式进行遍历诊察,运行速度缓慢,无法实现姿态主动控制,遇到肠道褶皱堆积还会发生长时间滞留人体的危险。而主动式磁控胶囊机器人能够克服上述被动磁控胶囊机器人的缺点,此类磁控胶囊机器人能够实现机器人方向和姿态的主动调整,缩短消化道遍历时间,提高诊疗效率,减少漏检区域,改善诊疗安全性。
目前利用机械手末端执行器安装永磁体驱动磁控胶囊机器人的方法应用较广泛,公开号CN110236474A,名称为“一种主动式磁控胶囊机器人检测系统及检测方法”的专利申请提出利用支撑架及控制台安装驱动磁体引导模块的方式,通过产生磁场对磁控胶囊机器人进行磁引导。然而,使用外部机械手磁体引导磁控胶囊机器人在肠道中运动,对机械手磁体的自由度要求较高。而且,若想利用机械手磁体驱动磁控胶囊机器人运动到目标方位,必须维持机器人内部永磁体和机械手磁体间的有效距离和相对速度,但是机械手的实时性和临场判断能力较难实现对磁控胶囊机器人的快速连续驱动。
发明内容
为解决上述问题,本发明的目的在于提供一种磁控胶囊机器人的磁耦合启动控制装置、系统及方法,能够对磁控胶囊机器人进行自启转速控制,并由人工手持完成磁控胶囊机器人的快速准确操控,无时间响应和判断不准确的问题,使用方便。
本发明的目的是通过以下技术方案实现的:
一方面,本发明提供了一种磁控胶囊机器人的磁耦合启动控制装置,包括:外部永磁体、步进电机、控制器;外部永磁体设置在步进电机的输出轴上,步进电机由控制器进行控制;
步进电机在控制器的控制作用下,并经步进电机中步进电机驱动器的驱动控制,在外部永磁体周围形成旋转磁场,进而形成动态耦合磁力矩,旋转磁场包围嵌有内部永磁体的磁控胶囊机器人,动态耦合磁力矩作用于磁控胶囊机器人,利用磁机耦合作用,依靠磁控胶囊机器人的旋转力与高粘度流体的推动力相互作用并高于磁控胶囊机器人的自启速度时,推动磁控胶囊机器人前进。
进一步地,当外部旋转磁场转速低于磁控胶囊机器人的自启速度时,在粘性液体的阻滞作用下,磁控胶囊机器人只能自转但不会前进;
随着外部旋转磁场转速的增加,磁控胶囊机器人转速随之提高,磁控胶囊机器人开始向前运动,对应的外部旋转磁场转速称为自启转速;
在磁控胶囊机器人启动运行之后,经过其稳态自调整,在自身重力和外部磁场的作用之下,磁控胶囊机器人沿偏移管道中心的方向稳定运行。
进一步地,磁控胶囊机器人沿偏移管道中心的方向稳定运行时,磁控胶囊机器人沿轴线方向运动达到受力平衡态,磁控胶囊机器人轴推力与流体阻力相等,磁控胶囊机器人以稳恒速度前进。
进一步地,外部永磁体为圆环状永磁体。
进一步地,圆环状外部永磁体安装于步进电机轴末端。
进一步地,步进电机在控制器中的Arduino单片机下进行控制作用。
进一步地,外部永磁体为径向充磁。
进一步地,磁控胶囊机器人进行前进推进的管道内部充满医用祛泡剂。
另一方面,本发明提供了一种磁控胶囊机器人的磁耦合系统,包括:包括磁耦合启动控制装置和磁控胶囊机器人,磁耦合启动控制装置为上述任一项的磁耦合启动控制装置。
进一步地,磁控胶囊机器人内嵌有内部永磁体。
再一方面,本发明提供了一种磁控胶囊机器人的磁耦合启动控制方法,包括以下步骤:
当外部旋转磁场转速低于磁控胶囊机器人自启速度时,在粘性液体的阻滞作用下,磁控胶囊机器人只能自转但不会前进;
随着外部旋转磁场转速的增加,磁控胶囊机器人转速随之提高,开始向前运动,对应的外部旋转磁场转速称为自启转速;
在磁控胶囊机器人启动运行之后,经过其稳态自调整,在自身重力和外部磁场的作用之下,磁控胶囊机器人沿偏移管道中心的方向稳定运行。
本发明的磁控胶囊机器人的磁耦合启动控制装置、系统及方法,步进电机在控制器的控制作用下,并经步进电机中步进电机驱动器的驱动控制,在外部永磁体周围形成旋转磁场,进而形成动态耦合磁力矩,旋转磁场包围嵌有内部永磁体的磁控胶囊机器人,动态耦合磁力矩作用于磁控胶囊机器人,利用磁机耦合作用,依靠磁控胶囊机器人的旋转力与高粘度流体的推动力相互作用并高于磁控胶囊机器人的自启速度时,推动磁控胶囊机器人前进,能够对磁控胶囊机器人进行自启转速控制,并由人工手持完成磁控胶囊机器人的快速准确操控,无时间响应和判断不准确的问题,使用方便。
附图说明
此处所说明的附图用来提供对本发明的进一步理解,构成本申请的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
图1为本发明的磁控胶囊机器人的磁耦合系统示意图;
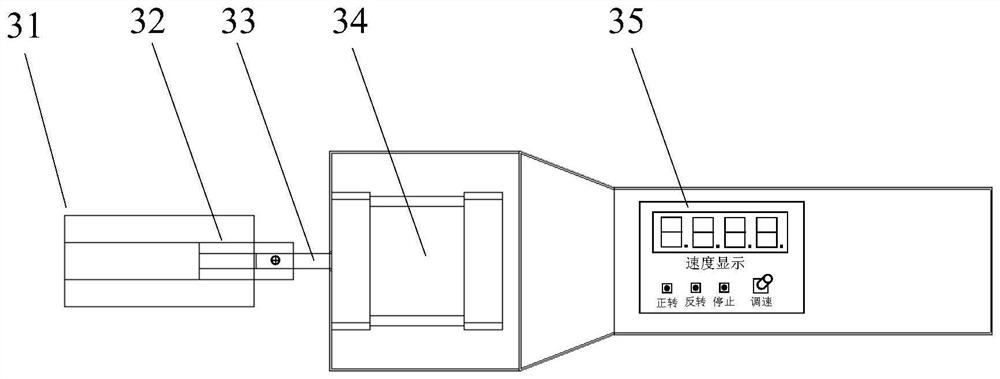
图2为本发明的磁控胶囊机器人的磁耦合启动控制装置示意图;
图3为本发明的内外永磁体相对旋转运动原理图;
图4为本发明的磁控胶囊机器人受力动态平衡示意图;
图5为本发明的磁控胶囊机器人动态启动运行示意图;
图6为本发明的磁控胶囊机器人的磁耦合启动控制方法的步骤框图;
其中附图标记为:1、病床;2、患者;3、手持控制装置;4、磁控胶囊机器人;31、外部永磁体;32、联轴器;33、输出轴;34、步进电机;35、控制面板。
具体实施方式
为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
实施例一
如图1-5所示,本发明实施例的一种磁控胶囊机器人的磁耦合启动控制装置(手持控制装置3),包括:外部永磁体31、步进电机34、控制器;外部永磁体31设置在步进电机34的输出轴33上,通过联轴器32连接,步进电机34由控制器进行控制,控制器通过控制面板35对步进电机34进行控制;
步进电机34在控制器的控制作用下,并经步进电机34中步进电机34驱动器的驱动控制,在外部永磁体31周围形成旋转磁场,进而形成动态耦合磁力矩,旋转磁场包围嵌有内部永磁体的磁控胶囊机器人4,动态耦合磁力矩作用于磁控胶囊机器人4,利用磁机耦合作用,依靠磁控胶囊机器人4的旋转力与高粘度流体的推动力相互作用并高于磁控胶囊机器人4的自启速度时,推动磁控胶囊机器人4前进。
本发明的磁控胶囊机器人的磁耦合启动控制装置,步进电机34在控制器的控制作用下,并经步进电机34中步进电机34驱动器的驱动控制,在外部永磁体31周围形成旋转磁场,进而形成动态耦合磁力矩,旋转磁场包围嵌有内部永磁体的磁控胶囊机器人4,动态耦合磁力矩作用于磁控胶囊机器人4,利用磁机耦合作用,依靠磁控胶囊机器人4的旋转力与高粘度流体的推动力相互作用并高于磁控胶囊机器人4的自启速度时,推动磁控胶囊机器人4前进,能够对磁控胶囊机器人4进行自启转速控制,并由人工手持完成磁控胶囊机器人4的快速准确操控,无时间响应和判断不准确的问题,使用方便。
其中,当外部旋转磁场转速低于磁控胶囊机器人4的自启速度时,在粘性液体的阻滞作用下,磁控胶囊机器人4只能自转但不会前进;
随着外部旋转磁场转速的增加,磁控胶囊机器人4转速随之提高,磁控胶囊机器人4开始向前运动,对应的外部旋转磁场转速称为自启转速;
在磁控胶囊机器人4启动运行之后,经过其稳态自调整,在自身重力和外部磁场的作用之下,磁控胶囊机器人4沿偏移管道中心的方向稳定运行。
其中,磁控胶囊机器人4沿偏移管道中心的方向稳定运行时,磁控胶囊机器人4沿轴线方向运动达到受力平衡态,磁控胶囊机器人4轴推力与流体阻力相等,磁控胶囊机器人4以稳恒速度前进。
其中,外部永磁体31为圆环状永磁体,形成更稳定的外部旋转磁场。
其中,圆环状外部永磁体31安装于步进电机34轴末端。
其中,步进电机34在控制器中的Arduino单片机下进行控制作用,控制精度更高。
其中,外部永磁体31为径向充磁。
其中,磁控胶囊机器人4进行前进推进的管道内部充满医用祛泡剂,便于形成稳定的阻滞作用,该管道为模拟人体肠道的管道。
下面以具体的实施例,对本发明一种磁控胶囊机器人的磁耦合启动控制装置进行详细说明。该装置包括病床1、患者2、手持控制装置3、磁控胶囊机器人4。
具体地说明下,磁控胶囊机器人4的力平衡关系,流体阻力矩与耦合磁力矩关系,磁控胶囊机器人4的流体阻力的推导过程:
根据磁耦合理论,外部永磁体31与磁控胶囊机器人4内部永磁体的耦合磁力矩垂直于内部永磁体磁矩矢量m与旋转磁场磁矢量B形成的平面,耦合磁力矩T
T
磁控胶囊机器人4在外部永磁体31旋转磁场作用下运动时,在启动瞬间或者停止状态时,管内流体阻力矩T
T
其中,δ为外部永磁体31旋转磁矢量与内部永磁体磁矩矢量之间的转差角。
如图3所示为外部永磁体31从位置(1)至位置(5)旋转驱动磁控胶囊机器人4内部永磁体的一个周期过程。启动初始时刻,内部永磁体N极与外部永磁体31S极处于相对静止状态,此时的外转差角为零,如图3的位置(1)所示。随着外部永磁体31速度的增加,内部永磁体也被两者之间的耦合磁力矩带动而旋转,由于磁控胶囊机器人4在大粘度管道中,流体的阻滞作用,使内部永磁体较外部永磁体31滞后一个常值转差角C,如图3的位置(2)所示。当达到稳态转速时,内外部永磁体31之间的常值转差角C会一直保持,直至减速停机,其余旋转状态如图3的位置(3)、位置(4)、位置(5)所示。
从磁控胶囊机器人4启动瞬间到稳态旋转过程中,随着转差角的增大,耦合磁力矩也逐渐增大,当流体阻力矩T
T
磁控胶囊机器人4逐渐加速转动,流体阻力矩T
T
磁控胶囊机器人4达到稳速状态,此时,磁控胶囊机器人4内部永磁体与旋转磁场之间保持同步旋转,转差角δ与流体阻力矩T
T
磁控胶囊机器人4的流体动压力也会降低,进而大粘度流体对磁控胶囊机器人4的阻力矩也会逐渐减小。调节步进电机34反转可实现磁控胶囊机器人4后退运动。
磁控胶囊机器人4在充满大粘度流体的管道中运行时,由于磁控胶囊机器人4的自旋运动,磁控胶囊机器人4外表面附着的螺旋肋推动流体向后沿机器人轴线方向流出,受到流体的剪切力和压力的反作用力,磁控胶囊机器人4沿轴线方向前进,即为轴推力F
启动初始时,F
F
此时磁控胶囊机器人4的稳恒前进速度为U
其中,C
磁控胶囊机器人在流体中运动时,流体阻力也与雷诺数和磁控胶囊机器人外部形状直接相关。当雷诺数较低时,与轴推力相关的粘性力为主要影响因素,并忽略惯性力的影响。圆形管道中,雷诺数为:
其中,D为管道直径,ρ为流体密度,μ为流体动力μ=0.5Pa·s粘度。由于磁控胶囊机器人运动速度较低,圆管直径较小,动力粘度,因此,Re<1。进而可得到由斯托克斯公式推导的粘性流体中机器人流体阻力:
F
其中,d为机器人半球形头部的直径。综合上式,可以得到阻力系数为:
最终可整理得出磁控胶囊机器人的流体阻力为:
首先,当外部旋转磁场转速较低且低于磁控胶囊机器人4自启速度时,在粘性液体的阻滞作用下,磁控胶囊机器人4只能自转但不会前进;然后,随着外部旋转磁场转速的增加,磁控胶囊机器人4转速随之提高,磁控胶囊机器人4开始向前运动,对应的外部旋转磁场转速称为自启转速;在磁控胶囊机器人4启动运行之后,经过较短时间的稳态自调整,在自身重力和外部磁场的作用之下,磁控胶囊机器人4沿偏移管道中心的方向稳定运行,如图5所示。
本发明由步进电机34的输出轴33末端圆环状永磁体旋转形成动态旋转磁场,与磁控胶囊机器人4内部永磁体的磁耦合作用驱动磁控胶囊机器人4旋转启动运行。当外部旋转磁场转速较低且低于磁控胶囊机器人4自启速度时,在粘性液体的阻滞作用下,机器人只能自转但不会前进。随着外部旋转磁场转速的增加,磁控胶囊机器人4转速随之提高,磁控胶囊机器人4开始向前运动。通过控制磁控胶囊机器人4的自启转速,可实现磁控胶囊机器人4的低扭矩、大轴推力的驱动控制,为体内医疗磁控胶囊机器人4的低功率消耗和快速检测奠定了临床应用基础。
实施例二
如图1-5所示,本发明实施例的一种磁控胶囊机器人的磁耦合系统,包括:磁耦合启动控制装置和磁控胶囊机器人4,磁耦合启动控制装置为上述任一项的磁耦合启动控制装置。
本发明的磁控胶囊机器人的磁耦合系统,步进电机34在控制器的控制作用下,并经步进电机34中步进电机34驱动器的驱动控制,在外部永磁体31周围形成旋转磁场,进而形成动态耦合磁力矩,旋转磁场包围嵌有内部永磁体的磁控胶囊机器人4,动态耦合磁力矩作用于磁控胶囊机器人4,利用磁机耦合作用,依靠磁控胶囊机器人4的旋转力与高粘度流体的推动力相互作用并高于磁控胶囊机器人4的自启速度时,推动磁控胶囊机器人4前进,能够对磁控胶囊机器人4进行自启转速控制,并由人工手持完成磁控胶囊机器人4的快速准确操控,无时间响应和判断不准确的问题,使用方便。
其中,磁控胶囊机器人4内嵌有内部永磁体。
实施例三
如图6所示,本发明实施例的一种磁控胶囊机器人的磁耦合启动控制方法,该方法包括以下步骤:
步骤S1:当外部旋转磁场转速较低且低于磁控胶囊机器人4自启速度时,在粘性液体的阻滞作用下,磁控胶囊机器人4只能自转但不会前进。启动初始时,流体阻力F
步骤S2:随着外部旋转磁场转速的增加,磁控胶囊机器人4转速随之提高,开始向前运动,对应的外部旋转磁场转速称为自启转速。当机器人转速达到自启转速时,有F
步骤S3:在磁控胶囊机器人4启动运行之后,经过较短时间的稳态自调整,在自身重力和外部磁场的作用之下,磁控胶囊机器人4沿偏移管道中心的方向稳定运行。此时磁控胶囊机器人4沿轴线方向运动达到受力平衡态,达到F
下面以具体的实施例,对本发明一种磁控胶囊机器人的磁耦合启动控制方法进行详细说明。其对应的装置包括病床1、患者2、手持控制装置3、磁控胶囊机器人4。
具体地说明下,磁控胶囊机器人4的力平衡关系,流体阻力矩与耦合磁力矩关系,磁控胶囊机器人4的流体阻力的推导过程:
根据磁耦合理论,外部永磁体31与磁控胶囊机器人4内部永磁体的耦合磁力矩垂直于内部永磁体磁矩矢量m与旋转磁场磁矢量B形成的平面,耦合磁力矩T
T
磁控胶囊机器人4在外部永磁体31旋转磁场作用下运动时,在启动瞬间或者停止状态时,管内流体阻力矩T
T
其中,δ为外部永磁体31旋转磁矢量与内部永磁体磁矩矢量之间的转差角。
如图3所示为外部永磁体31从位置(1)至位置(5)旋转驱动磁控胶囊机器人4内部永磁体的一个周期过程。启动初始时刻,内部永磁体N极与外部永磁体31S极处于相对静止状态,此时的外转差角为零,如图3的位置(1)所示。随着外部永磁体31速度的增加,内部永磁体也被两者之间的耦合磁力矩带动而旋转,由于磁控胶囊机器人4在大粘度管道中,流体的阻滞作用,使内部永磁体较外部永磁体31滞后一个常值转差角C,如图3的位置(2)所示。当达到稳态转速时,内外部永磁体31之间的常值转差角C会一直保持,直至减速停机,其余旋转状态如图3的位置(3)、位置(4)、位置(5)所示。
从磁控胶囊机器人4启动瞬间到稳态旋转过程中,随着转差角的增大,耦合磁力矩也逐渐增大,当流体阻力矩T
T
磁控胶囊机器人4逐渐加速转动,流体阻力矩T
T
磁控胶囊机器人4达到稳速状态,此时,磁控胶囊机器人4内部永磁体与旋转磁场之间保持同步旋转,转差角δ与流体阻力矩T
T
磁控胶囊机器人4的流体动压力也会降低,进而大粘度流体对磁控胶囊机器人4的阻力矩也会逐渐减小。调节步进电机34反转可实现磁控胶囊机器人4后退运动。
磁控胶囊机器人4在充满大粘度流体的管道中运行时,由于磁控胶囊机器人4的自旋运动,磁控胶囊机器人4外表面附着的螺旋肋推动流体向后沿机器人轴线方向流出,受到流体的剪切力和压力的反作用力,磁控胶囊机器人4沿轴线方向前进,即为轴推力F
启动初始时,F
F
此时磁控胶囊机器人4的稳恒前进速度为Uc。流体阻力大小与磁控胶囊机器人4形状、速度、迎流面积以及流体本身特性,如粘滞性和压缩性等因素有关。因此,磁控胶囊机器人4的流体阻力可表示成:
其中,CD为阻力系数,A为机器人迎流投影面积,即阻力面积。
磁控胶囊机器人在流体中运动时,流体阻力也与雷诺数和磁控胶囊机器人外部形状直接相关。当雷诺数较低时,与轴推力相关的粘性力为主要影响因素,并忽略惯性力的影响。圆形管道中,雷诺数为:
其中,D为管道直径,ρ为流体密度,μ为流体动力粘度。由于磁控胶囊机器人运动速度较低,圆管直径较小,动力粘度μ=0.5Pa·s,因此,Re<1。进而可得到由斯托克斯公式推导的粘性流体中机器人流体阻力:
F
其中,d为机器人半球形头部的直径。综合上式,可以得到阻力系数为:
最终可整理得出磁控胶囊机器人的流体阻力为:
首先,当外部旋转磁场转速较低且低于磁控胶囊机器人4自启速度时,在粘性液体的阻滞作用下,磁控胶囊机器人4只能自转但不会前进;然后,随着外部旋转磁场转速的增加,磁控胶囊机器人4转速随之提高,磁控胶囊机器人4开始向前运动,对应的外部旋转磁场转速称为自启转速;在磁控胶囊机器人4启动运行之后,经过较短时间的稳态自调整,在自身重力和外部磁场的作用之下,磁控胶囊机器人4沿偏移管道中心的方向稳定运行,如图5所示。
本发明由步进电机34的输出轴33末端圆环状永磁体旋转形成动态旋转磁场,与磁控胶囊机器人4内部永磁体的磁耦合作用驱动磁控胶囊机器人4旋转启动运行。当外部旋转磁场转速较低且低于磁控胶囊机器人4自启速度时,在粘性液体的阻滞作用下,机器人只能自转但不会前进。随着外部旋转磁场转速的增加,磁控胶囊机器人4转速随之提高,磁控胶囊机器人4开始向前运动。通过控制磁控胶囊机器人4的自启转速,可实现磁控胶囊机器人4的低扭矩、大轴推力的驱动控制,为体内医疗磁控胶囊机器人4的低功率消耗和快速检测奠定了临床应用基础。
本发明的有益效果至少在于:
基于内外永磁体相对旋转运动原理分析机器人自启特性,确定磁控胶囊机器人4自启转速与流体粘度和轴推力之间的关系,可有效降低磁控胶囊机器人4的自启转速条件,显著提高机器人驱动灵活性。通过控制在大粘度流体下机器人的自启转速,可实现机器人的低扭矩、大轴推力的驱动控制,为体内医疗磁控胶囊机器人4的低功率消耗和快速检测奠定了临床应用基础。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 磁控胶囊机器人的磁耦合启动控制装置、系统及方法
- 胶囊控制装置、磁控胶囊内镜移动控制系统及方法