一种智能采茶机器人
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及机器人领域,特别涉及一种智能采茶机器人。
背景技术
茶叶是我国重要的经济作物,茶产业在国民经济中具有重要地位,我国许多种类茶叶的产量都居于世界前列。由于茶芽采摘具有季节性较强、作业时间短、作业环境差、劳动强度大等特点,因而茶芽采摘是茶叶生产中最耗时、最费力的环节。目前,茶芽采摘大都依赖于人工来完成,茶芽收获期间需要投入的劳动力约占整个生产过程的80-90%,若在采茶时令来临前招募采茶工往往比较困难,而若长期雇用采茶工则会导致人工投入成本过高。因而目前的采茶方法存在着人工成本投入高且效率低下的问题。
名优茶的最佳采摘季节一般在清明节前后几天,由于采用人工采茶精力有限,且投入成本高,因而采茶机器人就应运而生,采茶机器人具有节约成本、方便监管、可以取代人类进行长时间繁重工作等特点,因此亟需一种智能采茶机器人,在保证名优茶叶品质的同时提高茶叶采摘效率。
采茶机器人通常使用高质量的机载可充电蓄电池组来给自身供电,但是现有采茶机器人中的供电系统一般都只能维持很短时间,一旦电能耗尽,就需要及时对机器人进行充电。
发明内容
为此,需要提供一种智能采茶机器人,用以解决现有的采茶机器人供电系统续航时间短的问题。
为实现上述目的,发明人提供了一种智能采茶机器人,所述智能采茶机器人包括采茶本体和行走机构;所述采茶本体设置于所述行走机构上方;所述行走机构包括行走本体、驱动单元和第一电源;所述采茶本体内设置有第二电源和控制单元;
所述驱动单元用于驱动所述行走本体移动,所述第一电源用于为所述驱动单元提供电力;
所述第二电源与所述控制单元电连接,所述第二电源包括一个输入端口和至少两个输出端口,所述第一电源包括至少一个输入端口和至少一个输出端口;所述第二电源的其中一个输出端口可拆卸地与所述第一电源的输入端口连接;
当第二电源的两个输出端口分别与所述第一电源的输入端口、控制单元建立连接时,所述第二电源同时为所述控制单元和驱动单元提供电力。
作为一种可选的实施例,所述第一电源为不间断电源。
作为一种可选的实施例,所述第二电源为不间断电源。
作为一种可选的实施例,所述行走机构还包括第一稳压器,所述第一稳压器与第一电源连接。
作为一种可选的实施例,所述行走机构还包括第二稳压器,所述第二稳压器与第二电源连接。
作为一种可选的实施例,所述行走机构还包括第一控制开关,所述第一控制开关与所述第一电源电连接,所述第一控制开关用于控制第一电源开启或关闭。
作为一种可选的实施例,所述行走机构还包括第二控制开关,所述第二控制开关与所述第二电源电连接,所述第二控制开关用于控制第二电源开启或关闭。
作为一种可选的实施例,所述行走机构为自动导引运输车。
区别于现有技术,上述技术方案所述的智能采茶机器人,所述智能采茶机器人包括采茶本体和行走机构;所述采茶本体设置于所述行走机构上方;所述行走机构包括行走本体、驱动单元和第一电源;所述采茶本体内设置有第二电源和控制单元;所述驱动单元用于驱动所述行走本体移动,所述第一电源用于为所述驱动单元提供电力;所述第二电源与所述控制单元电连接,所述第二电源包括一个输入端口和至少两个输出端口,所述第一电源包括至少一个输入端口和至少一个输出端口;所述第二电源的其中一个输出端口可拆卸地与所述第一电源的输入端口连接;当第二电源的两个输出端口分别与所述第一电源的输入端口、控制单元建立连接时,所述第二电源同时为所述控制单元和驱动单元提供电力。这样,当行走机构上的第一电源的电量耗尽时,只需将本体上的第二电源的一个输出端口与第一电源的输入端口建立连接,采茶本体上的第二电源在为控制单元提供电力的同时,还可以继续为驱动单元提供电力,从而大幅提高了智能采茶机器人的工作时长。
附图说明
图1为本发明一实施例涉及的智能采茶机器人的结构示意图;
图2为本发明一实施例涉及的智能采茶机器人的供电系统结构示意图;
图3为本发明一实施例涉及的智能采茶机器人的使用流程图。
附图标记说明:
10、行走机构;
101、第一电源;1011、第三输出端口;1012、第二输入端口;
102、驱动单元;
103、第一稳压器;
104、行走本体;
20、采茶本体;
201、第二电源;2011、第一输出端口;2012、第二输出端口;2013、第一输入端口;
202、控制单元;
203、第二稳压器。
具体实施方式
为详细说明技术方案的技术内容、构造特征、所实现目的及效果,以下结合具体实施例并配合附图详予说明。
请参阅图1,为本发明一实施例涉及的智能采茶机器人的流程图。所述智能采茶机器人包括采茶本体20和行走机构10;所述采茶本体20设置于所述行走机构10上,例如行走机构10的上方或者其他易于安装采茶本体20的部位;所述行走机构10包括行走本体104、驱动单元102和第一电源101;所述采茶本体20内设置有第二电源201和控制单元202;
所述驱动单元102用于驱动所述行走本体104移动,所述第一电源101用于为所述驱动单元102提供电力;
所述第二电源201与所述控制单元202电连接,所述第二电源201包括一个输入端口和至少两个输出端口,所述第一电源101包括至少一个输入端口和至少一个输出端口;所述第二电源201的其中一个输出端口与所述第一电源101的输入端口连接;
当第二电源201的两个输出端口分别与所述第一电源101的输入端口、控制单元202建立连接时,所述第二电源201同时为所述控制单元202和驱动单元102提供电力。
这样,当行走机构10上的第一电源101的电量耗尽时,只需将采茶本体20上的第二电源201的一个输出端口与第二电源的输入端口建立连接,将采茶本体20上的第二电源201在为控制单元202提供电力的同时,还可以继续为行走机构10上的驱动单元102提供电力,从而大幅提高了智能采茶机器人的工作时长。
在本发明的一些实施例中,所述第二电源201的其中一个输出端口可拆卸地与所述第一电源101的输入端口连接,该接口集成于采茶本体20和行走机构10之间的信号连接端口,这样采茶本体20和行走机构10可以单独设置和组合使用,其中一个损坏可以方便更换。
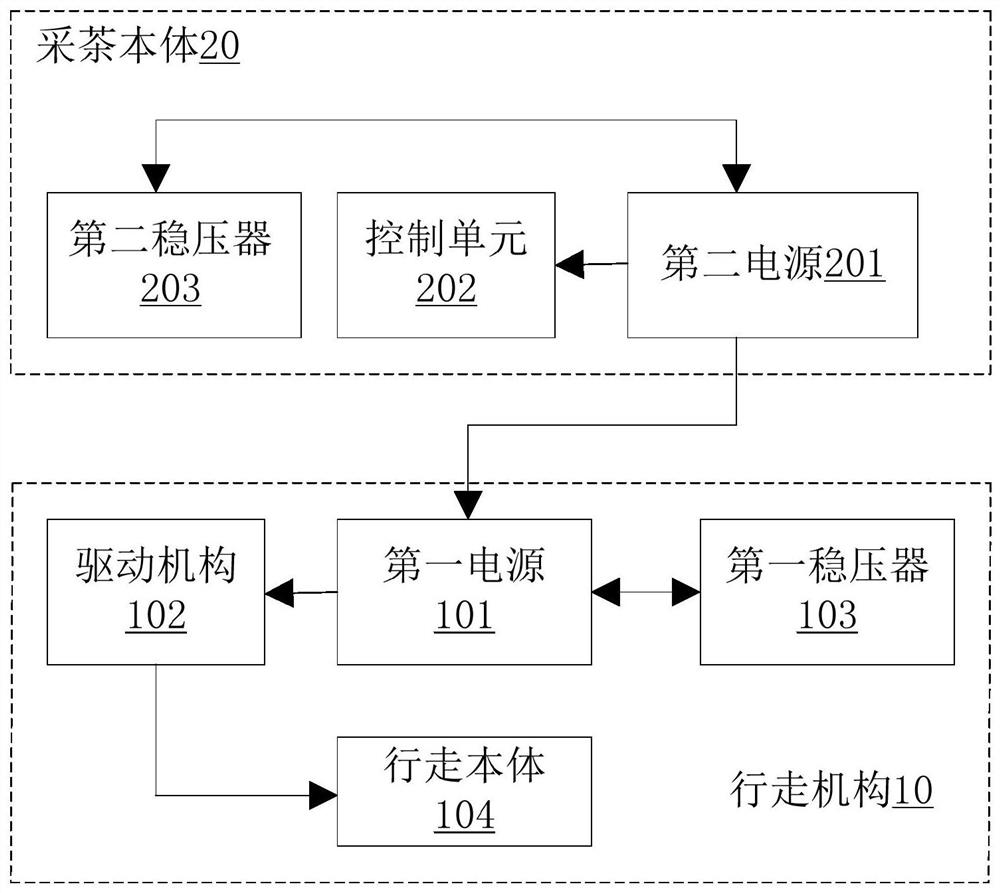
如图2所示,为本发明一实施例涉及的智能采茶机器人的供电系统结构示意图。
所述第一电源101包括第三输出端口1011和第二输入端口1012。所述第二电源201包括第一输出端口2011、第二输出端口2012和第一输入端口2013。第一输出端口2011与控制单元202连接,第二输出端口2012与第二输入端口1012可拆卸连接。具体地,当第二电源电量未耗尽时,第二输出端口2012与第二输入端口1012未建立连接,此时第一电源和第二电源分别为采茶本体20和行走机构10提供电源。而当第二电源电量耗尽时,使用者可以将第二输出端口2012与第二输入端口1012建立连接,这样,第二电源2011的电量不仅可以输送给采茶本体20上的控制单元202,还可以输送给行走机构10上的驱动单元102,从而有效延长了智能采茶机器人的续航能力。
当然,在另一些实施例中,所述第一电源101上也可以设置有两个输出端口,当采茶本体20上的第二电源201的电量先耗尽时,使用者可以将第二电源的输入端口与第一电源101上的其中一个输出端口建立连接,第一电源的另一个输出端口仍与驱动单元102连接,从而实现第一电源101同时为采茶本体20和行走机构10进行供电的效果。
在某些实施例中,所述第一电源101和第二电源201均为不间断电源。不间断电源,即UPS(Uninterrupted Power Supply),是一种储能装置,以逆变器为主要元件、稳压稳频输出的电源保护设备,主要用于单台计算机、计算机网络系统或其他电力电子设备提供不间断的电力供应。
当市电输入正常时,UPS将市电稳压后供应给负载使用,此时的UPS就是一台交流市电稳压器,同时它还向机内电池充电;当市电中断时,UPS立即将机内电池的电能,通过逆变器转换为220V交流电,以使负载维持正常工作,并保护负载软硬件不受损坏。UPS电源系统由五部分组成:主路、旁路、电池等电源输入电路,进行AC/DC变换的整流器(REC),进行DC/AC变换的逆变器(INV),逆变和旁路输出切换电路以及蓄能电池。
第一电源101和第二电源201采用不间断电源,可以对行走机构和采茶本体内的各控制电路起到保护作用,同时也有利于提高智能采茶机器人整体的续航能力。
在某些实施例中,所述行走机构10还包括第一稳压器103,所述第一稳压器103与第一电源101连接。所述行走机构10还包括第二稳压器,所述第二稳压器与第二电源201连接。稳压器是使输出电压稳定的设备。稳压器由调压电路、控制电路、及伺服电机等组成。当输入电压或负载变化时,控制电路进行取样、比较、放大,然后驱动伺服电机转动,使调压器碳刷的位置改变,通过自动调整线圈匝数比,从而保持输出电压的稳定。通过设置第一稳压器和第二稳压器,可以使得行走机构10和采茶本体20内的供电更加稳定。
优选的,所述行走机构10还包括第一控制开关,所述第一控制开关与所述第一电源101电连接,所述第一控制开关用于控制第一电源101开启或关闭。所述行走机构10还包括第二控制开关,所述第二控制开关与所述第二电源201电连接,所述第二控制开关用于控制第二电源201开启或关闭。使用者可以在需要使用智能采茶机器人时,通过第一控制开关开启第一电源,以及通过第二控制开关开启第二电源,使得智能采茶机器人处于正常运行状态,进行采茶作业。当采茶工作结束后,使用者可以通过一控制开关关闭第一电源或通过第二控制开关关闭第二电源,使得智能采茶机器人处于非工作状态,以节约其能耗。
在本实施方式中,所述行走机构10为自动导引运输车。自动导引运输车,又称AGV(Automated Guided Vehicle)小车,是指装备有电磁或光学等自动导引装置、能够沿规定的导引路径行驶,以及具有安全保护以及各种移载功能的运输车,AGV属于轮式移动机器人(WMR――Wheeled Mobile Robot)的范畴。工业应用中不需驾驶员的搬运车,以可充电之蓄电池为其动力来源。一般可透过电脑来控制其行进路线以及行为,或利用电磁轨道(electromagneticpath-followingsystem)来设立其行进路线,电磁轨道黏贴於地板上,无人搬运车(Driverless)则依循电磁轨道所带来的讯息进行移动与动作的运输车。
如图3所示,为本发明一实施例涉及的智能采茶机器人的使用流程图。
首先进入步骤S301利用不间断电源向采茶AGV小车和采茶本体内电池充电。
在采茶AGV小车和采茶本体内部均设有蓄电池,且两部分的供电系统相互独立,在采茶机器人开始工作之前,先利用不间断电源向采茶机器人内的电池充电。当不间断电源供电给采茶机器人充电时,不间断电源对220V的进行稳压后供应给采茶AGV小车和采茶本体使用,此时不间断电源可看作一台交流式电稳压器,同时还向设备内的电池充电;
当这两个电源的电量充满以后,而后可以进入步骤S302打开AGV小车电源供电开关,以及步骤S303控制采茶AGV小车开启。而后可以进入步骤S304控制采茶AGV小车行驶至采茶工作起始点。
当采茶机器人电池电量充满时停止充电,不间断电源在停止给设备充电时,立即将电池的直流电能采用逆变器切换转换的方法,向采茶本体和小车继续供应220V交流电。此时可打开采茶AGV小车不间断电源开关,同时采茶AGV小车开机,行驶到准备采茶地点。
而后可以进入步骤S305打开采茶本体电源供电开关。而后进入步骤S306控制采茶本体开启以及步骤S307采茶本体开启工作。待完成开机初始化等准备工作后,智能采茶机器人可以开始茶芽采摘工作模式。
当采茶AGV小车电量耗尽后,可以进入步骤S308采茶本体的不间断电源同时向AGV小车与采茶本体同时供电。
由于采茶AGV小车电量消耗速度往往大于采茶本体电量消耗速度,因此本发明设计采茶本体不间断电源设有两个输出端口,当采茶AGV小车电源电量耗尽时,将采茶AGV小车电量输入端接到采茶本体不间断电源另一个输出端口,可实现采茶本体不间断电源在给采茶本体供电的同时,也可以继续给采茶AGV小车供电,该设计尽可能的增大智能采茶机器人的工作时长。
需要说明的是,本申请主要是针对采茶机器人的供电系统进行改进,以提高采茶机器人的续航能力。关于采茶机器人的机械机构,在现有技术中已有披露,如申请号为“201620831747.6”的中国专利,此处不再展开赘述。
本发明公开了一种智能采茶机器人,所述智能采茶机器人包括采茶本体和行走机构;所述采茶本体设置于所述行走机构上方;所述行走机构包括行走本体、驱动单元和第一电源;所述采茶本体内设置有第二电源和控制单元202;所述驱动单元用于驱动所述行走本体移动,所述第一电源用于为所述驱动单元提供电力。所述第二电源包括一个输入端口和至少两个输出端口;所述第二电源的其中一个输出端口可拆卸地与所述第一电源的输入端口连接。这样,当行走机构上的第二电源的电量耗尽时,只需将采茶本体上的第一电源的一个输出端口与第二电源的输入端口建立连接,本体上的第一电源在为控制单元202提供电力的同时,还可以继续为驱动单元提供电力,从而大幅提高了智能采茶机器人的工作时长。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
- 一种智能采茶机器人及应用其采茶的方法
- 一种智能采茶机器人及其采茶方法