带有控制面板的插秧机
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及插秧机领域,特别涉及一带有控制面板的插秧机。
背景技术
近年来,为了减轻人力作业的工作负荷,改善人工作业的环境,节省人力成本,农业机械化得到大力发展和迅速推进,插秧机也成为普及程度较高的农业机械之一,被越来越多的农户应用于农田作业中,相比于传统的人工插秧,插秧机作业效率高,尤其是高速插秧机的出现,大大提升了插植效率。另外,插秧机能够合理地控制秧苗的株距和行距,科学的插植作业有利于秧苗的生长和增产。
现有的插秧机主要是依靠驾驶室内的驾驶人员进行控制的。具体来说,控制插秧机前进、后退、加速、减速以及插植机构上升和下降等动作的操作杆和控制台等装置都位于驾驶室内,方便驾驶人员操作。然而,在实际驾驶的过程中,插秧机可能会出现一些小故障,比如说插植机构不能进行正常插植作业,需要驾驶人员离开驾驶室进行检查和修理。待修理完成之后,驾驶人员返回驾驶室确认插秧机是否能够正常作业,若插秧机仍然无法正常作业,则驾驶人员再次离开驾驶室到插秧机后部检查插植机构的状况。来回于插秧机前部和后部,浪费了驾驶人员的时间,也降低了修理的效率。而且,驾驶人员在农田中行走,频繁地进入驾驶室,容易把驾驶室环境弄得很脏,也不利于后续的安全驾驶。
此外,驾驶室内的视野有限,难以完全观察到插植机构的实际状态,比如说插植机构的高度位置,秧苗的行距株距是否合理等。举例来说,驾驶人员在调试插植机构时,需要驾驶插秧机插植一段时间后,再下车检查插植的秧苗的行距和株距是否与预先设置的有偏差,作业效率较低。通常需要另外一个作业人员和驾驶人员相互配合,一个人在驾驶室内控制,另外一个人进行调试和修理,而这样的人员配置又会增加人力成本。
发明内容
本发明的一个目的在于提供一带有控制面板的插秧机,其中利用所述插秧机的所述控制面板可以控制所述插秧机的一行驶主体、一插植主体以及一机身主体的工作状态,操作方便,提高了所述插秧机的操作效率,也有利于节约人力成本。
本发明的另一个目的在于提供一带有控制面板的插秧机,其中所述插秧机的所述控制面板被设置于所述机身主体的后部,操作人员可以在所述插秧机的后部控制所述插秧机的工作状态,不需要在所述插秧机的前后来回走,降低了操作人员的作业强度,有利于节省人力成本。
本发明的另一个目的在于提供一带有控制面板的插秧机,其中所述插秧机的所述控制面板被设置于所述机身主体的后部,提供操作人员更好的操作视野,方便操作人员及时地掌握所述插秧机的实时状态。
本发明的另一个目的在于提供一带有控制面板的插秧机,其中所述控制面板靠近所述插秧机的所述插植主体,操作人员在操作所述控制面板时,可以观察到所述插植主体的实际状态,进而根据所述插植主体的实际状态调整便于操作人员一次调整到位,避免重复作业。
本发明的另一个目的在于提供一带有控制面板的插秧机,其中所述控制面板的设置允许操作人员无需进入驾驶室即可控制所述插秧机,当操作人员在修理所述插秧机时,可以通过控制面板进行调试,不需要反复进入驾驶室内,不仅提高了修理的效率,而且有利于保持驾驶室的干净。
本发明的另一个目的在于提供一带有控制面板的插秧机,其中所述控制面板包括多个控制键和一控制主板,多个所述控制键被设置于所述控制主板,节省了安装空间,同时提高了所述插秧机的电气化和集成化程度。
依本发明的一个方面,本发明提供一带有控制面板的插秧机,其包括:
一插秧机本体,其中所述插秧机本体包括一机身主体、被设置于所述机身主体的一行走主体和一插植主体;和
一控制面板,其中所述控制面板被保持于所述机身主体的后部,所述控制面板被连接于所述机身主体、所述行走主体以及所述插植主体,所述控制面板能够控制所述机身主体、所述行走主体以及所述插植主体的工作状态。
根据本发明的一个实施例,所述控制面板包括一控制主板和一控制组件,其中所述控制组件被可通信地连接于所述控制主板,所述控制组件允许被操作以输入操作指令。
根据本发明的一个实施例,所述控制组件包括一速度控制键,其中所述速度控制键被连接于所述控制主板,所述控制主板被连接于所述行驶主体。
根据本发明的一个实施例,所述控制组件包括一升降控制键,其中所述升降控制键被可通信地连接于所述控制主板,所述控制主板被连接于所述插植主体。
根据本发明的一个实施例,所述控制组件包括一灯光控制键,其中所述灯光控制键被可通信地连接于所述控制主板,所述控制主板被连接于所述机身主体的灯光组件。
根据本发明的一个实施例,所述插秧机本体包括一差速锁系统,所述控制组件包括一差速锁控制键,其中所述差速锁控制键被可通信地连接于所述控制主板,其中所述控制主板被连接于所述差速锁系统。
根据本发明的一个实施例,所述控制组件包括一声音控制键,其中所述差速控制键被可通信地连接于所述控制主板,其中所述控制主板被连接于所述机身主体的声音组件。
根据本发明的一个实施例,所述速度控制键、升降控制键、所述灯光控制键、所述差速锁控制键以及所述声音控制键选自:旋钮、推杆以及按键组成的类型组。
根据本发明的一个实施例,所述控制面板包括一保护壳体,所述控制主板被密封于所述保护壳体内,所述控制组件被可活动地安装于所述保护壳体。
根据本发明的一个实施例,所述插秧机本体包括一护栏,其中所述护栏包括一左侧护栏、一右侧护栏以及一中护栏,其中所述左侧护栏和所述右侧护栏分别被设置于所述机身主体的左侧和右侧,所述中护栏的两端分别被安装于所述左侧护栏和所述右侧护栏,且所述左侧护栏、所述右侧护栏以及所述中护栏位于所述机身主体的后部,所述控制面板包括一装配件,所述装配件被设置于所述保护壳体,所述装配件以被安装于所述左侧护栏、所述右侧护栏或者所述中护栏的方式被保持于所述机身主体的后部。
根据本发明的一个实施例,所述带有控制面板的插秧机进一步包括一插秧机控制系统,其中所述插秧机控制系统包括一控制器、一控制手柄以及一插植控制单元,其中所述行驶主体包括一液压传动装置和被可驱动地连接于所述液压传动装置的一行驶机构,其中所述插植主体包括一液压阀和一插植机构,其中所述液压阀包括一阀主体和被可操作地连接于所述阀主体的一液压阀杆,所述插植机构被连接于所述阀主体,其中所述控制手柄被可通信地连接于所述控制器,其中所述插植控制单元被可控制地连接于所述控制器,所述插植控制单元被连接于所述插植主体的所述液压阀的所述液压阀杆。
根据本发明的一个实施例,所述插秧机控制系统进一步包括一行驶控制单元,其中所述行驶控制单元被可驱动地连接于所述控制手柄和所述控制器,所述行驶控制单元被连接于所述行驶主体的所述液压传动装置。
根据本发明的一个实施例,所述行驶控制单元包括一手柄位置检测元件、一 HST状态检测元件以及一HST控制电机,其中所述手柄位置检测元件被连接于所述控制手柄,所述手柄位置检测元件检测所述控制手柄的位置,所述液压传动装置被可控制地连接于所述HST控制电机,所述HST检测元件被连接于所述HST控制电机,其中所述HST检测元件检测所述HST控制电机的转动。
根据本发明的一个实施例,所述手柄位置检测元件被可通信地连接于所述控制器,其中所述控制器根据所述手柄位置检测元件反馈的信息控制所述HST控制电机的转动。
根据本发明的一个实施例,所述HST状态检测元件被可通信地连接于所述控制器,其中所述控制器根据所述HST状态检测元件反馈的信息控制所述HST控制电机的转动。
根据本发明的一个实施例,所述行驶控制单元进一步包括一手柄驱动杆、一第一安装板、一支撑架以及一第一连杆,其中所述手柄驱动杆的两端分别被连接于所述控制手柄和所述支撑架,所述支撑架被安装于所述插秧机本体的所述机身主体,所述第一安装板被固定于所述机身主体,所述第一连杆被安装于所述支撑架,所述手柄位置检测元件被连接于所述手柄位置检测元件,所述控制手柄转动时,驱动所述手柄驱动杆转动,所述手柄驱动杆带动所述第一连杆转动,进而带动所述手柄位置检测元件偏转。
根据本发明的一个实施例,所述行驶控制单元进一步包括转动板、第二安装板以及一第二连杆,其中所述HST控制电机通过所述第二安装板被安装于所述机身主体,所述转动板分别被连接于所述HST控制电机和所述液压传动装置,所述 HST控制电机转动时,带动所述转动板相对所述液压传动装置转动,并调节所述液压传动装置的输出的动力大小,所述第二连杆分别被连接于所述转动板和所述 HST状态检测元件,所述HST状态检测元件跟随所述转动板偏转。
根据本发明的一个实施例,所述插植控制单元包括一液压阀状态检测元件和一液压阀控制电机,其中所述液压阀控制电机被可通信地连接于所述控制器,所述插植主体的所述液压阀的所述液压阀杆被可驱动地连接于所述液压阀控制电机,所述液压阀检测元件检测所述液压阀杆的转动。
根据本发明的一个实施例,所述插植控制单元进一步包括一第一活动板、一第二活动板以及一第三连杆,其中所述液压阀状态检测元件和所述液压阀控制电机通过所述第二活动板被安装于所述机身主体,其中所述第一活动板被安装于所述液压阀杆,所述第三连杆的两端分别被连接于所述第一活动板和所述液压阀状态检测元件,所述液压阀控制电机带动所述第一活动板转动时,所述第一活动板带动所述液压阀的所述液压阀杆作动,同时,所述第一活动板带动所述液压阀检测元件偏转。
根据本发明的一个实施例,所述液压阀检测元件被可通信地连接于所述控制器,所述控制器根据所述液压阀状态检测元件反馈的信息控制所述液压阀控制电机转动。
根据本发明的一个实施例,所述插植控制单元进一步包括一插植位置检测元件、一第一安装板、一第四连杆以及一第五连杆,其中所述插植位置检测元件通过所述第三安装板被安装于所述机身主体,所述第五连杆的两端分别被连接于所述插植主体的所述插植机构和所述第四连杆,所述第四连杆的两端分别被连接于所述第五连杆和所述插植位置检测元件,所述插植机构在作动的过程中拉动所述第四连杆和所述第五连杆,并带动所述插植位置检测元件转动。
根据本发明的一个实施例,所述插植位置检测元件被可通信地连接于所述控制器,所述控制器根据所述插植位置检测元件反馈的信息控制所述液压阀控制电机。
根据本发明的一个实施例,所述插秧机控制系统进一步包括一转向检测单元,其中所述转向检测单元包括一转向角度检测元件、一安装座、一连接杆、一驱动杆以及一转向板,其中所述安装座被安装于所述插秧机本体的所述机身主体,所述转向角度检测元件被安装于所述安装座,所述驱动杆被连接于所述转向板和所述连接件,所述连接件连接所述转向角度检测元件,所述转动板被连接于所述行驶机构的方向盘,所述行驶机构的方向盘转向时,所述行驶机构的所述方向盘带动所述转向板转动,所述转向板带动所述连接件转动,所述连接件带动所述转向角度检测元件偏转。
根据本发明的一个实施例,所述手柄位置检测元件、所述HST状态检测元件、所述液压阀状态检测元件、所述插植位置检测元件以及所述转向角度检测元件被实施为角度传感器。
附图说明
图1是根据本发明的一较佳实施例的一插秧机的立体图示意图。
图2是根据本发明的上述较佳实施例的所述插秧机的立体图示意图。
图3是根据本发明的上述较佳实施例的所述插秧机的控制系统的一控制手柄的立体图示意图。
图4A和图4B是根据本发明的上述较佳实施例的所述插秧机的控制系统的一行驶控制单元的结构图示意图。
图5A和图5B是根据本发明的上述较佳实施例的所述插秧机的控制系统的所述行驶控制单元的结构图示意图。
图6A和图6B是根据本发明的上述较佳实施例的所述插秧机的控制系统的一插植控制单元的结构图示意图。
图7A和图7B是根据本发明的上述较佳实施例的所述插秧机控制系统的所述插植控制单元的结构图示意图。
图8A和图8B是根据本发明的上述较佳实施例的所述插秧机控制系统的一转向检测单元的结构图示意图。
图9A和图9B是根据本发明的上述较佳实施例的所述插秧机的一差速锁系统的结构图示意图。
图10A是根据本发明的上述较佳实施例的所述插秧机的部分结构的仰视图示意图。
图10B是根据本发明的上述较佳实施例的所述插秧机的部分结构的示意图。
图11A和图11B是根据本发明的上述较佳实施例的所述插秧机的一控制面板和一护栏的结构图示意图。
图12是根据本发明的上述较佳实施例的所述插秧机的所述控制面板的立体图示意图。
图13A是根据本发明的上述较佳实施例的所述插秧机的所述控制面板的俯视图示意图。
图13B是根据本发明的上述较佳实施例的所述插秧机的所述控制面板的仰视图示意图。
具体实施方式
以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。在以下描述中界定的本发明的基本原理可以应用于其他实施方案、变形方案、改进方案、等同方案以及没有背离本发明的精神和范围的其他技术方案。
本领域技术人员应理解的是,在本发明的揭露中,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系是基于附图所示的方位或位置关系,其仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对本发明的限制。
可以理解的是,术语“一”应理解为“至少一”或“一个或多个”,即在一个实施例中,一个元件的数量可以为一个,而在另外的实施例中,该元件的数量可以为多个,术语“一”不能理解为对数量的限制。
参照说明书图1至图10B,根据本发明的一较佳实施例的一插秧机1000和其插秧机控制系统100将在接下来的描述中被阐述,其中通过对所述插秧机1000 进行电气化改造,将驾驶人员操作频率较高的几个动作进行电控化和集成化,提高了所述插秧机1000的电气化程度,改善了驾驶人员的作业环境,降低了驾驶人员的作业强度。
所述插秧机1000包括所述插秧机控制系统100和一插秧机本体200,其中所述插秧机本体200包括一机身主体210、一行驶主体220以及一插植主体230,其中所述行驶主体210和所述插植主体230被安装于所述机身主体210,所述行驶主体220带动所述机身主体210和所述插植主体230运动,所述插植主体230 在所述行驶主体220行驶的过程中进行插秧作业。
所述行驶主体220包括一行驶机构221和一液压传动装置222,其中所述行驶机构221被可驱动地连接于所述液压传动装置222,所述液压传动装置222能够驱动所述行驶机构221运转,进而带动所述插秧机1000前进、后退加速以及减速等。优选地,所述液压传动装置222为静液压传动装置,即所述液压传动装置为功率元件和控制元件等组成的闭式油路系统,英文缩写为HST。
所述插植主体230包括一插植机构231和一液压阀232,其中所述液压阀232 包括阀主体2321和液压阀杆2322,所述液压阀杆2322被可活动地设置于所述阀主体2321,所述液压阀杆2322控制所述阀主体的工作状态,所述阀主体2321 被连接于所述插植机构231,所述阀主体2321能够驱动所述插植机构231上升和下降。
所述插秧机控制系统100包括一控制手柄10、一行驶控制单元20、一插植控制单元30以及一控制器40,其中所述控制手柄10被连接于所述行驶控制单元20,通过操作所述控制手柄10能够控制所述插秧机1000的所述行驶主体220 前进、后退、加速以及减速等。所述控制手柄10被可通信地连接于所述控制器 40,所述插植控制单元30被可控制地连接于所述控制器40,通过操作所述控制手柄10能够控制所述插秧主体230的所述插植机构231的上升和下降。优选地,所述控制手柄10被保持于所述行驶主体220的方向盘旁,方便驾驶人员操作。
也就是说,对所述插秧机1000进行电气化改造后,驾驶人员操作频率较高的几个动作被集成于所述控制手柄10,驾驶人员通过操作所述控制手柄10就能实现对所述插秧机1000的控制。甚至只需要前期对所述插秧机1000进行简单操作后,所述插秧机1000就可以自动驾驶,进而解放驾驶人员,明显地改善了驾驶人员的工作环境和作业强度,也有利于降低插植作业的人力成本。
参照图3,所述控制手柄10包括一控制主体11、自所述控制主体11向下延伸的一连接杆12以及一操作键13,其中所述操作键13被可活动地设置于所述控制主体11。通过握持所述控制主体11向前或是向后移动的方式,可以控制所述插秧机本体100向前、向后、加速以及减速。每个所述操作键13对应不同的操作指令,通过选择不同的所述操作键13,所述控制手柄10发出对应的所述操作指令。所述控制器40根据所述操作指令控制所述插植控制单元30实现所述插秧主体230的所述插植机构231的上升和下降。
具体地,所述控制手柄10的所述控制主体11的前部和后部为弧形曲面,所述控制主体11的表面向内凹陷,且凹陷形状与人体的手部半握时的状态相适配,以符合驾驶人员的握持习惯。
优选地,所述操作键13包括一插植按钮131、一行走按钮132以及一拨杆 133,其中所述插植按钮131对应的操作指令为插秧,驾驶人员按下所述插植按钮131后,所述插植主体230的所述插植机构231开始插秧作业,再按一下所述插植按钮131,即可停止插秧作业。所述行走件按钮132对应的操作为所述插秧机1000自动行走,驾驶人员按下所述行走按钮132后,所述行驶主体220的所述行驶机构221自动行走,再按一下所述行驶按钮132,即可取消自动行走。所述拨杆133对应的操作为所述插植主体230的所述插植机构231上升和下降,向下拨动所述拨杆133,则所述插植机构231下降,向上拨动所述拨杆133,则所述插植机构231上升。本领域技术人员应该理解的是,所述操作键13的具体实施方式仅仅作为示例,所述操作键13也可以被实施为包括其他控制功能。
在本发明的这个具体的实施例中,所述插植按钮131和所述拨杆133被设置于所述控制主体11的左侧部,当驾驶人员握持所述控制主体11时,所述插植按钮131和所述拨杆133靠近驾驶人员的大拇指,方便驾驶人员操作。所述行走按钮132位于所述控制主体11的下部,当需要使用所述行走按钮132时,向下移动手部即可。优选地,所述行走按钮132位于所述控制主体11的后部下方,有利于防止驾驶人员误触碰。
参照图4A至图5B,所述行驶控制单元20包括一手柄位置检测元件21、一 HST状态检测元件22以及一HST控制电机23。所述手柄位置检测元件21被连接于所述控制手柄10,其中所述手柄位置检测元件检测21检测所述控制手柄10 的位置变化。所述HST控制电机23根据所述控制手柄10的位置变化控制所述液压传动装置222到达对应的位置。所述HST控制电机23被连接于所述液压传动装置222,所述HST状态检测元件22被连接于所述HST控制电机23,所述HST 状态检测元件22根据所述HST控制电机23的转动角度获取所述液压传动装置222的工作状态。以在所述HST状态检测元件22反馈所述HST控制电机23转动到对应的角度后,所述HST控制电机停止转动。所述液压传动系统222保持此时的工作状态持续输出动力,进而实现所述插秧机1000的前进、后退、加速以及减速。
参照图4A和图4B,具体来说,所述行驶控制单元20进一步包括一手柄驱动杆24、一第一安装板25、一支撑架26以及一第一连杆27,其中所述手柄驱动杆24的一端被连接于所述控制手柄10,另一端被安装于所述支撑架26,所述支撑架26被可转动地安装于所述插秧机本体200的所述机身主体210。所述第一安装板25被固定于所述机身主体210,所述第一连杆27和所述手柄位置检测元件21分别被保持于所述第一安装板25的两侧,且所述第一连杆27被连接于所述手柄位置检测元件21,所述第一连杆27被安装于所述支撑架26。驾驶人员在行驶所述插秧机1000的过程中,如需要所述插秧机1000前进、后退、加速以及减速时,推动所述控制手柄10,所述控制手柄10驱动所述手柄驱动杆24转动,所述手柄驱动杆24带动所述第一连杆27转动,使得所述手柄位置检测元件 21偏转一定的角度。如此,所述手柄位置检测元件21能够检测所述控制手柄10 的位置变化。
参照图5A和图5B,所述行驶控制单元20进一步包括一转动板28、一第二安装板29以及一第二连杆201,所述转动板28包括一卡齿部281和一体地延伸于所述卡齿部281的一调节部282。所述HST控制电机23通过所述第二安装板 29被安装于所述机身主体210。所述转动板28的所述卡齿部281被连接于所述 HST控制电机23,所述调节部282被安装于所述液压传动装置222,所述HST控制电机23转动时,带动所述转动板28相对所述液压传动装置222转动,并调节所述液压传动装置222输出的动力的大小。所述第二连杆201分别被连接于所述转动板28和所述HST状态检测元件22。所述HST状态检测元件22跟随所述转动板28偏转,进而所述HST状态检测元件22通过检测所述转动板28转动的角度获取所述HST控制电机23转动的角度和所述液压传动装置222对应的工作状态,例如但不限于所述液压传动装置222输出的动力大小等。换句话说,所述 HST控制电机23转动的角度反应所述液压传动装置222的工作状态,通过检测所述HST控制电机23转动的角度即可获取所述液压传动装置222的工作状态。优选地,所述转动板28被实施为一齿板。
在本发明的这个具体的实施例中,所述手柄位置检测元件21和所述HST状态检测元件22分别被实施为角度传感器,所述手柄位置检测元件21通过检测偏转角度来获取所述控制手柄10的位置变化,所述HST状态检测元件22通过检测所述HST控制电机23的转动角度来获取对应的所述液压传动装置222的工作状态。本领域技术人员应该理解的是,所述手柄位置检测元件21和所述HST状态检测元件22的具体实施方式仅仅作为示例,不能成为对本发明所述插秧机控制系统100的内容和范围的限制。
更进一步地,所述手柄位置检测元件21被可通信地连接于所述控制器40,所述手柄位置检测元件21检测到的所述控制手柄10的位置信息被传送至所述控制器40,所述HST控制电机23被可控制地连接于所述控制器40,所述控制器 40根据所述控制手柄10的位置信息控制所述HST控制电机23转动对应的角度,进而调节所述液压传动装置222的工作状态。所述HST状态检测元件22被可通信地连接于所述控制器40,所述HST检测元件22获取所述液压传动装置222的状态信号被传送至所述控制器40,当所述HST控制电机23转动至对应的角度,即所述液压传动装置222被调整至对应于所述控制手柄10的位置对应的工作状态后,所述控制器40控制所述HST转动电机23停止转动。所述液压传动系统 222保持此时的工作状态持续输出动力,进而实现所述插秧机1000的前进、后退、加速以及减速。
参照图6A至图7B,所述插植控制单元30包括一液压阀状态检测元件31和一液压阀控制电机32,其中所述液压阀控制电机32被可控制地连接于所述控制器40,所述插植主体230的所述液压阀232的所述液压阀杆2322被可驱动地连接于所述液压阀控制电机32,所述液压阀状态检测元件31能够检测所述液压阀 323的工作状态。所述控制器40根据接收的所述控制手柄10的所述操作键13 发出的所述操作指令控制所述液压阀控制电机32的转动,并带动所述液压阀杆 2322运动,进而改变所述液压阀主体2321的工作状态,以实现被可驱动地连接于所述液压阀主体2321的所述插秧主体230的所述插植机构231的上升和下降。
具体来说,参照图6A和图6B,所述插植控制单元30进一步包括一第一活动板33、一第二活动板34以及一第三连杆35,其中所述液压阀状态检测元件 31和所述液压阀控制电机32通过所述第二活动板34被安装于所述机身主体 210,其中所述第一活动板34被安装于所述液压阀231的所述液压阀杆2322,所述第三连杆35的两端分别被连接于所述第一活动板33和所述液压阀状态检测元件31。优选地,所述第一活动板33和所述第二活动板34被实施为齿板。
所述第一活动板33包括一连接部331、一驱动部332以及一连接柱333,其中所述驱动部332一体地延伸于所述连接部331,所述连接柱333自所述驱动部 332向外延伸,所述第三连杆35具有一活动通孔3501,所述第一活动板33的所述连接柱333被可活动地保持于所述第三连杆35的所述活动通孔3501。
驾驶人员通过操作所述控制手柄10的所述操作键13发出所述操作指令,所述控制器40接收所述操作指令后控制所述液压阀控制电机32转动,所述液压阀控制电机32带动所述第一活动板33转动,所述第一活动板33带动所述液压阀 231的所述液压阀杆2322作动。同时,所述第一活动板33转动时会带动所述液压阀检测元件31偏转一定的角度,进而所述液压阀检测元件31能够反馈所述液压阀杆2322的位置。所述液压阀杆2322的不同位置对应于所述液压阀主体2321 的不同的工作状态。也就是说,通过检测所述液压阀杆2322的位置,即可获得所述液压阀主体2321对应的工作状态。
进一步地,所述液压阀状态检测元件31被可通信地连接于所述控制器40,所述液压阀状态检测元件31反馈所述液压阀杆2322的位置信息于所述控制器 40,即所述控制器40能够获取所述液压阀主体2321的工作状态。当所述液压阀杆2322转动至完成所述操作指令所需的位置时,所述控制器40根据所述液压阀状态检测元件31反馈的信息控制所述液压阀控制电机32停止转动。通过这样的方式,利用所述控制手柄10就能够控制所述插秧机本体200的所述插植主体230 的所述插植机构231上升和下降等作业。
在本发明所述插秧机控制系统100的这个具体的实施例中,所述插植控制单元30能够反馈所述插植主体230的所述插植机构231的实时位置,不仅能够控制所述插植机构231保持于一预设高度,而且方便驾驶人员了解所述插植机构 231的实际高度,以更好地控制所述插植机构231的具体作业。
具体来说,参照图7A和图7B,所述插植控制单元30进一步包括一插植位置检测元件36、一第三安装板37、一第四连杆38以及一第五连杆39。所述插植位置检测元件36通过所述第三安装板37被安装于所述机身主体210。所述第五连杆39的两端分别被连接于所述插植主体230的所述插植机构231和所述第四连杆38。所述第四连杆38的两端分别被连接于所述第五连杆39和所述插植位置检测元件36。所述插植机构231在作动的过程中拉动所述第五连杆39和所述第四连杆38,从而带动所述插植位置检测元件36转动,进而所述插植位置检测元件36能够反馈所述插植机构231的位置变化信息。
进一步地,所述插植位置检测元件36被可通信地连接于所述控制器40,所述控制器40可以根据所述插植位置检测元件36反馈的位置信息控制所述液压阀控制电机32的工作状态,进而使得所述插植机构231能够被保持于所述预设高度。比如说,当所述插植位置检测元件36检测到所述插植机构231上升至预设高度时,所述控制器40控制所述液压阀控制电机32的转动,进而控制所述液压阀231达到中立位置,以保持所述插植机构231于预设高度。
在本发明的这个具体的实施例中,所述液压阀状态检测元件31和所述插植位置检测元件36分别被实施为角度传感器。所述液压阀状态检测元件31通过检测所述液压阀控制电机32的转动角度获取所述液压阀主体2321的工作状态。所述插植位置检测元件36通过检测被连接于所述插植机构231的连杆的转动角度的方式获取所述插植机构231上升和下降的位置。本领域技术人员应该理解的是,所述液压阀状态检测元件31和所述插植位置检测元件36的具体实施方式仅仅作为示例,不能成为对本发明所述插秧机控制系统100的内容和范围的限制。
参照图8A和图8B,在本发明所述插秧机控制系统100的这个具体的实施例中,所述插秧机控制系统100进一步包括一转向控制单元50,所述转向控制单元50能够实时地检测所述插秧机本体200的所述行驶主体220的轮胎的方向变化。
具体来说,所述转向控制单元50包括一转向角度检测元件51、一安装座52、一连接件53、一驱动杆54以及一转向板55,其中所述安装座52被安装于所述插秧机本体200的所述机身本体210,所述转向角度检测元件51被安装于所述安装座52,所述驱动杆54被连接于所述转向板55和所述连接件53,所述连接件53连接所述转向角度检测元件51,所述转向板55被连接于所述行驶机构221 的方向盘。
当所述插秧机1000需要转向时,所述行驶机构221的所述方向盘转动,所述方向盘带动所述转向板55转动,所述转向板55带动所述连接件53转动,所述连接件53带动所述转向角度检测元件51偏转一定的角度,进而所述转向角度检测元件51能够获得所述行驶机构221的轮胎转动的角度。
进一步地,所述转向角度检测元件51被可通信地连接于所述控制器40,所述转向角度检测元件51反馈所述行驶机构221的轮胎的角度变化信息于所述控制器40,进而驾驶人员能够了解所述轮胎及时的方向,以便于更好地控制所述插秧机1000的行驶。
依据本发明的另一个方面,本发明进一步提供所述插秧机控制系统100的控制方法,其中所述控制方法包括如下步骤:
(a)获取所述控制手柄的位置信息;和
(b)根据所述控制手柄的位置信息控制所述HTS控制电机的转动;以及
(c)所述HST控制电机调节所述液压传动装置的工作状态。
具体来说,在所述步骤(a)中,利用角度传感器检测所述控制手柄的位置变化。在所述步骤(b)中,所述角度传感器将所述控制手柄的位置信息发送至所述控制器40,所述控制器40控制所述HST控制电机的转动。
进一步地,在所述步骤(c)之后包括步骤(d)获取所述HST控制电机的转动角度。优选地,在所述步骤(d)中,利用角度传感器检测所述HST控制电机的转动角度。
在所述步骤(d)之后,进一步包括步骤(e)在所述HST控制电机转动至与所述手柄的位置相对应的角度后,所述HST控制电机被控制地停止转动,所述液压传动装置保持此时的工作状态持续输出动力。具体地,在所述步骤(e)中,所述角度传感器反馈所述HST控制电机的转动角度于所述控制器40,所述控制器40控制所述HST控制电机停止转动。
在所述控制方法中,进一步包括步骤(f)所述控制器40在执行所述控制手柄10的所述操作指令时控制所述液压阀控制电机32转动,并调节所述液压阀 232至对应的工作状态。
在所述控制方法中,进一步包括步骤(g)利用角度传感器检测所述插植机构231的位置变化。进一步地,所述控制器40根据所述插植机构231的位置信息控制所述液压阀控制电机32的工作状态,进而使得所述插植机构231能够被保持于所述预设高度。
参照图9A至图10B,在本发明所述的插秧机1000的这个具体的实施例中,所述插秧机1000进一步包括一差速锁系统300,其中所述差速锁系统300被连接于所述插秧机本体200的所述行驶主体220的所述行驶机构221。所述差速锁系统300能够电动控制地在一锁止状态和一解锁状态之间切换,当所述差速锁系统 300处于所述锁止状态时,所述行驶机构221的车轮被锁定为一个整体,且被保持同一转动方向和转速,方便所述插秧机100能够快速地经过打滑地段或是跨越田埂。当所述差速锁系统300处于所述解锁状态时,所述行驶机构221的车轮可正常动作。如此,提高了所述插秧机的电气化程度,改善了驾驶人员的作业环境,降低了驾驶人员的作业强度。
参照图9A和图9B,所述差速锁系统300进一步包括一差速器310、一差速器踏板320以及一电驱动组件330,其中差速器踏板320被连接于所述差速器 310,所述电驱动组件330被连接于所述差速器踏板320。所述电驱动组件330 在响应驾驶人员的操作指令时驱动所述差速器踏板320转动,进而所述差速器踏板320驱动所述差速器310在所述锁止状态和所述解锁状态之间切换。
所述电驱动组件330包括一电驱动元件331和一连接元件332,其中所述连接元件332的两端分别连接于所述电驱动元件331和所述差速器踏板320,所述电驱动元件331在响应驾驶人员的操作指令时电驱动地伸缩,并拉动所述连接元件332同时运动,进而带动所述差速器踏板320转动,以电驱动地改变所述差速器310的工作状态。
优选地,所述差速锁系统300的所述电驱动组件330的所述电驱动元件331 被可通信地连接于所述控制系统100的所述控制器40,所述控制器40能够控制所述电驱动组件330的伸缩状态。在本发明的一个具体示例中,所述控制器40 允许输入所述操作指令,所述控制器40控制所述电驱动元件331执行所述操作指令,以改变所述差速器310的工作状态。在本发明的另一个具体的示例中,利用所述控制手柄10的所述操作键13输入所述控制指令,所述控制器40根据所述控制指令控制所述电驱动元件331的伸缩状态。也就是说,驾驶人员通过操作所述控制手柄10就能够轻松省力地调节所述差速锁310的工作状态,减少了驾驶人员的工作负荷,提高了所述插秧机1000的工作效率。
举例来说,当所述插秧机1000经过农田的打滑路段时,驾驶人员输入对应于所述锁止状态的所述操作指令,所述电驱动元件331在执行所述操作指令时,缩短自身长度,拉动所述连接元件332朝向所述电驱动元件331运动,进而所述差速器踏板320相对于所述机身主体210逆时针转动,所述差速器踏板320被拉下,所述差速器310嵌合,所述差速器310自所述解锁状态切换至所述锁止状态,所述行驶机构221的车轮一起转动。当所述插秧机1000经过打滑路段后,输入对应于所述解锁状态的所述操作指令,所述电驱动元件331在执行所述操作指令时,延伸自身长度,推动所述连接元件332向远离所述电驱动元件331的方向运动,进而所述差速器踏板320相对所述机身主体210顺时针转动,所述差速器踏板320恢复初始位置,所述差速器310分开,所述差速器310自所述锁止状态切换至所述解锁状态。或者,当驾驶人员按下所述操作键113时,所述差速器310 切换至所述锁止状态,当驾驶人员松开所述操作按键113时,所述差速器310切换至所述解锁状态。本领域技术人员应该理解的是,控制所述差速器310在所述锁止状态和所述解锁状态之间切换的具体方式仅仅作为示例,不能成为对本发明所述插秧机1000和其差速锁系统300的内容和范围的限制。比如说,控制所述差速器310的所述操作键113也可以独立设置。
值得一提的是,所述电驱动元件331和所述连接元件332的具体实施方式不受限制。优选地,所述电驱动元件331被实施为一电推杆,所述连接元件332被实施为一拉绳或是一拉杆。
在本发明的这个具体的实施例中,所述电驱动组件330进一步包括一弹性元件333,其中所述弹性元件333的两端分别被连接于所述连接元件332和所述电驱动元件331,当所述差速器310无法立即切换至所述锁止状态时,所述弹性元件333可以提供所述差速器310缓冲时间,以起到过载保护的作用。
比如说,当所述行驶机构221的车轮深陷泥潭无法转动时,所述电驱动组件 330的所述电驱动元件331在执行操作指令时,无法及时地将所述连接元件332 和所述差速器踏板320拉动至需求位置,即无法立刻使得所述差速器310嵌合。此时,所述弹性元件333被拉伸,并积蓄弹性势能。当所述行驶机构221的车轮慢慢转动至合适的位置后,所述差速器310嵌合,切换至锁止状态,所述弹性元件333积蓄的弹性势能逐渐释放,以避免所述电驱动元件331、所述连接元件332 以及所述差速器踏板320损坏,进而提高了所述差速锁系统300的使用寿命。
优选地,所述弹性元件333被连接于所述连接元件332和所述差速器踏板 320,同样可以提供缓冲时间,起到过载保护的作用。
进一步地,所述电驱动组件330包括一装配板334、一固定板335以及一引导管336,其中所述装配板334和所述固定板335分别被安装于所述机身主体 210,所述电驱动元件331被安装于所述装配板334,所述引导管336被安装于所述装配板334和所述固定板335。所述引导管336具有一引导通道3361,所述连接元件332被可活动地保持于所述引导管336的所述引导通道3361。一方面,藉由所述引导管道336规整所述连接元件332的延伸方向,另一方面,所述引导管道336的包裹有利于避免所述连接元件332在频繁运动的过程中和周围的零部件发生摩擦和剐蹭。
值得一提的是,所述差速锁系统300的所述差速器踏板320允许驾驶人员通过踩踏的方式驱使转动,也就是说,所述差速器310不仅可以被电动驱动地在所述锁止状态和所述解锁状态之间切换,也可以人工驱动地在所述锁止状态和所述解锁状态之间切换。
依本发明的另一个发面,本发明进一步提供所述差速器控制系统300的一控制方法,其中所述控制方法包括如下步骤:
(a)电动地驱动所述差速器踏板320转动;和
(b)驱使所述差速器310在所述锁止状态和所述解锁状态之间切换。
具体来说,在所述步骤(a)中,所述电驱动元件331通过电动伸缩的方式拉动所述连接元件332运动,进而驱动所述差速器踏板320转动。
进一步地,在所述步骤(a)中,当所述电驱动元件331收缩,拉动所述连接元件332朝向所述电驱动元件331运动,进而拉动所述差速器踏板320转动至预设位置;当所述电驱动元件331伸长,所述连接元件331朝向远离所述电驱动元件331的方向运动,所述差速器踏板320转动至初始位置。
在本发明的这个具体的实施例中,所述控制方法进一步包括步骤(c)当所述电驱动元件331收缩时,所述弹性元件333以被拉伸的方式发生形变,并在所述差速器踏板320转动至预设位置后,所述弹性元件333恢复初始状态。
参照图11A至图13B,在本发明所述的插秧机1000的这个具体的实施例中,所述插秧机1000进一步包括一控制面板400,其中所述控制面板400被安装于所述插秧机本体200的所述机身主体210,其中所述控制面板400被连接于所述插秧机本体200的所述行驶主体210、所述插植主体220以及所述机身主体230,通过操作所述控制面板400,能控制所述行驶主体210、所述插植主体220以及所述机身主体230的工作状态。
优选地,所述插秧机1000的所述控制面板400被安装于所述机身主体230 的后部,即所述控制面板400远离被设置于所述机身主体230的前部的驾驶室,操作人员无需进入驾驶室就能方便地控制所述插秧机1000。换句话说,所述控制面板400被设置于驾驶室的外部,操作人员能够获得更广阔的视野,能够观察到所述插秧机1000的实际工作状态,方便及时调整,避免频繁返回驾驶室内。
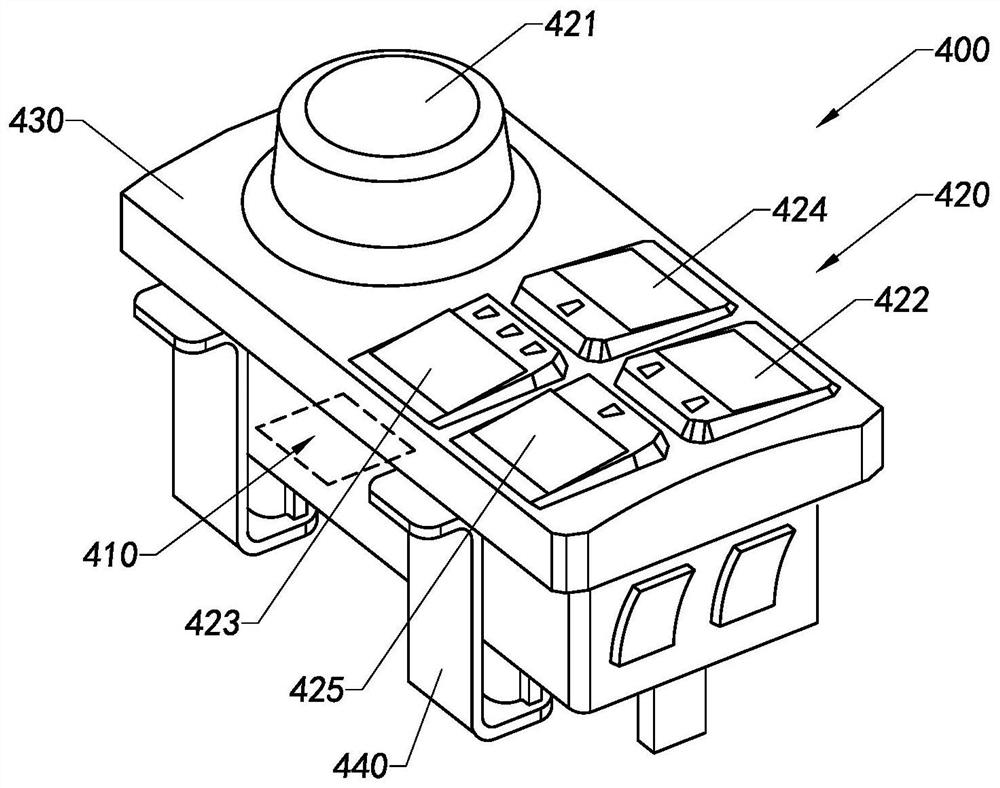
具体来说,所述控制面板400包括一控制主板410和一控制组件420,其中所述控制组件420被可通信地所述控制主板410,所述控制主板410被可通信地连接于所述行驶主体210、所述插植主体220以及所述机身主体230,操作人员通过操作所述控制元件420可输入操作指令,以控制所述行驶主体210、和所述插植主体220的工作状态。
优选地,所述控制组件420包括一个速度控制键421,其中所述速度控制键 421被连接于所述控制主板410,所述控制主板410被连接于所述行驶主体220 的驱动部件,例如但不限于所述液压传动装置222,通过操作所述速度控制键421 可以调节所述行驶主体220的行驶速度。所述速度控制键421可以被实施为但不限于旋钮或推杆等。优选地,所述速度控制键421可以被实施为带阻尼旋钮,可连续调节车速,且按键偏硬,行程和凸起小,可以有效的防止误触。
优选地,所述控制组件420包括一升降控制键422,其中所述升降控制键422 被可通信地连接于所述控制主板410,所述控制主板410被连接于所述插植主体 230的所述插植机构231,其中所述升降控制键422对应的操作命令为控制所述插植主体230的所述插植机构231的上升和下降。优选地,所述升降控制键422 可以被实施为但不限于旋钮、推杆或是按键等。在本发明的一个具体的实施例中,所述升降控制键422可以被实施为包括两个控制键,其中一个控制上升,另一个控制下降。
优选地,所述控制组件420包括一灯光控制键423,其中所述灯光控制键423 被可通信地连接于所述控制主板410,所述控制主板410被连接于所述机身主体 210的灯光组件,比如说前后车灯。通过操作所述灯光控制键423可以调节所述灯光组件的开关、光线强弱等。优选地,所述灯光控制键423可以被实施为不限于旋钮、推杆或是按键等。
优选地,所述控制组件420包括一差速锁控制键424,其中所述差速锁控制键424被可通信地连接于所述控制主板410,其中所述控制主板410被连接于所述差速锁系统300,其中所述差速锁控制键424对应的操作指令为控制所述差速锁系统300的所述差速器310在所述锁止状态和所述解锁状态之间切换。优选地,所述差速锁控制键424可以被实施为但不限于旋钮、推杆或是按键等。
优选地,所述控制组件420包括一声音控制键425,其中所述差速控制键425 被可通信地连接于所述控制主板410,其中所述控制主板410被连接于所述机身主体210的声音组件,例如但不限于喇叭。通过操作所述声音控制键425可以产生提示音或是调节声音的大小,以提醒周围的人。优选地,所述声音控制键425 可以被实施为但不限于旋钮、推杆或是按键等。
值得一提的是,所述控制组件420的具体实施方式不受限制,所述控制组件 420可以根据使用需求增加其他功能性的控制键,例如但不限于控制所述插秧机1000前进后退、自动行驶等。并且,多个控制键被集成于所述控制面板400,减小了所述控制面板400的体积,节省了装配空间。
所述控制面板400进一步包括一保护壳体430,其中所述控制主板410被隐藏于所述保护壳体430内,避免外界的水流影响所述控制主板410的正常工作。所述控制组件420被设置于所述保护壳体430,方便操作人员使用。
所述控制面板400进一步包括一装配件440,其中所述装配件440被设置于所述保护壳体430,所述装配件440被可拆卸地保持于所述机身主体210的后部。
在本发明所述插秧机1000的这个具体的实施例中,所述插秧机本体200还包括一护栏240,其中所述护栏240被安装于所述机身主体210的后部,所述控制面板400以被设置于所述护栏240的方式被保持于所述机身主体210的后部。
所述护栏240包括一左侧护栏241、一右侧护栏242以及一中护栏243,其中所述左侧护栏241和所述右侧护栏242分别被设置于所述机身主体210的左侧和右侧,所述中护栏243的两端分别被安装于所述左侧护栏241和所述右侧护栏 242。
优选地,所述控制面板400通过所述装配件440被固定于所述左侧护栏241 的方式被保持于所述机身主体210的后部。优选地,所述控制面板400通过所述装配件440被固定于所述右侧护栏242的方式被保持于所述机身主体210的后部。分布于所述机身主体210的两侧的所述控制面板400更方便操作人员操作。可选地,所述控制面板400通过所述装配件440被固定于所述中护栏243的方式被保持于所述机身主体210的后部。
并且,所述控制面板400靠近所述插植主体230的所述插植机构231,操作人员在操作所述控制面板400时,可以观察到所述插植主体230的实际状态,例如但不限于实际高度等,便于操作人员一次调整到位,避免重复作业。
值得一提的是,所述控制面板400的所述装配件440和所述护栏240的具体连接方式不受限制,所述例如但不限于,所述装配件440通过卡扣固定、锁定锁固等方式被安装于所述护栏240。
在本发明的这个具体的实施例中,所述护栏240进一步包括一维持件244,其中所述维持件244环绕于所述控制面板400。具体地,所述维持件244具有一维持空间,所述控制面板400被保持于所述维持空间内,比如说,所述控制面板 400的尺寸与所述维持件244的所述维持空间相适配,所述控制面板400被卡合于所述维持件244的所述维持空间,进一步避免所述控制面板400与所述护栏 240分离。
所述控制面板400进一步包括一电源端口450,所述电源端口450被电连接于所述控制主板410。所述电源端口450被设置于所述保护壳体430的背面,所述电源端口450允许被电连接于所述机身主体210的供电机构,借由所述电源端口450能够为所述控制面板400的正常运作获取电能。在本发明的另一个具体的实施例中,所述控制面板400也可以被实施为自带电源。
本领域的技术人员可以理解的是,以上实施例仅为举例,其中不同实施例的特征可以相互组合,以得到根据本发明揭露的内容很容易想到但是在附图中没有明确指出的实施方式。
本领域的技术人员应理解,上述描述及附图中所示的本发明的实施例只作为举例而并不限制本发明。本发明的目的已经完整并有效地实现。本发明的功能及结构原理已在实施例中展示和说明,在没有背离所述原理下,本发明的实施方式可以有任何变形或修改。
- 带有控制面板的插秧机
- 一种插秧机用带有封闭除草功能的分插秧机构