直流断路器
文献发布时间:2023-06-19 11:55:48
技术领域
本发明的实施方式涉及直流断路器。
背景技术
直流输电与交流输电相比输电效率较高。与此相对,对于设备的引进成本而言,直流输电的情况为高成本。但是,在长距离输电、海上输电等中,由于直流输电的输电效率压倒性得高,所以若对设备成本加上运用成本来进行评价,则直流输电的情况的综合成本低。因此,直流输电例如被利用于隔着海的2处据点间的输电。近年来,为了使发电电力中的、使用了可再生能源的发电电力的比率提高,并通过可再生能源来供应更大的电力,正在研究使用海洋上风力发电、沙漠地带的太阳能发电等来在从作为主要的电力消耗地的城市远离的场所进行大规模的发电,并进行长距离输电的方法。与此相伴,计划构建将多个电力的供给地点与需要地点连接的直流输电网。
当构建将3处以上的据点间连接的输电网时,需要在输电网发生了事故的情况下能够将事故点从健全的系统迅速切断的装置。一般,在交流电流系统中使用机械触点式断路器。机械触点式断路器通过在由交流电流产生的电流零点处断开触点并将绝缘性介质吹到触点间的电弧电流来将事故电流切断。与此相对,在直流输电系统中,由于在事故电流不产生电流零点,所以在以往的机械触点式断路器中难以将事故电流迅速地切断。
鉴于此,作为能够单独将直流电流切断的半导体断路器,提出了使用IGBT(Insulated Gate Bipolar Transistor)等具有自消弧能力的多个自激式半导体元件的半导体断路器。但是,由于进行输电的电力的全部总是通过多个自激式半导体元件,所以会产生大的导通损耗,导致通常运转时的输电效率的降低。
为了解决该问题,提出了一种对将机械触点式断路器与辅助半导体断路器串联连接而成的电路并联连接另一个半导体断路器的混合断路器。在该混合断路器中,机械触点式断路器与辅助半导体断路器在稳定输电时成为导通状态,上述的另一个半导体断路器成为断路状态。因而,输电电流在机械触点式断路器与辅助半导体断路器中流动。
另外,当发生事故时,在使辅助半导体断路器成为断路状态的同时,对机械触点式断路器赋予断开指令。通过这样辅助半导体断路器成为断路状态,使得流经机械触点式断路器与辅助半导体断路器的路径的事故电流向上述的另一个半导体断路器换流。而且,在机械触点式断路器的断开动作结束、确保了稳定通电路径的耐电压性能之后,通过将上述的另一个半导体断路器切断,使得事故电流的切断结束。
对于这样的混合断路器而言,由于稳定输电时的导通损耗只是辅助半导体断路器的导通损耗,所以与仅使稳定通电路径成为如上述那样能够单独切断直流电流的半导体断路器的构成相比,可降低导通损耗。然而,由于仍然发生辅助半导体断路器的通电损耗,所以与以往那样的稳定通电路径仅由机械触点构成的机械触点式断路器相比,混合断路器的导通损耗大。
鉴于此,提出了一种对将半导体断路器与由半桥电路构成的换流电路串联连接而成的电路并联连接机械触点式断路器的直流断路器。在该直流断路器中,在稳定输电时机械触点式断路器成为导通状态、半导体断路器以及换流电路成为断路状态。因而,稳定输电时的输电电流仅在机械触点式断路器中流动。
另外,在发生事故时,对机械触点式断路器赋予断开指令,半导体断路器成为导通状态,对换流电路赋予换流指令。于是,换流电路向与流经机械触点式断路器的事故电流相反的方向流动电流而在机械触点式断路器的电流生成零点,通过该机械触点式断路器断开,使得事故电流从机械触点式断路器向半导体断路器以及换流电路换流。在事故电流换流后,通过半导体断路器被断路而结束事故电流的切断。
这样的直流断路器由于稳定通电路径仅由机械触点式断路器构成,所以能够大幅度降低导通损耗。然而,由于半导体断路器价格高昂,所以混合断路器与以往的机械触点式断路器相比存在设备成本大幅度增加的可能性。
专利文献1:国际公开第2015/166600号
专利文献2:国际公开第2016/056274号
专利文献3:国际公开第2017/134825号
发明内容
本发明要解决的课题在于,提供一种能够缩短电流的断路时间以及抑制设备成本的直流断路器。
实施方式的直流断路器具有机械断路部、放电器(arrester)以及换流装置。机械断路部具有至少一个机械断路单元和绝缘支柱。至少一个机械断路单元具有至少一个单体断路部。绝缘支柱对至少一个机械断路单元进行支承。至少一个单体断路部分别具有机械触点部、密闭容器、操作杆、以及操作机构。机械触点部具有固定接触件以及可动接触件。机械触点部与大地电绝缘。密闭容器封入机械触点部以及绝缘性气体。密闭容器与大地电绝缘。操作杆与可动接触件连结。操作杆从密闭容器的内部向外部延伸突出。操作机构与操作杆连结。操作机构使可动接触件相对于固定接触件接触分离。操作机构被设置为与可动接触件同电位。至少一个单体断路部具有第一单体断路部以及第二单体断路部。第一单体断路部以及第二单体断路部被配置为各自的操作杆通过操作机构而在同一直线上动作,并且由操作机构引起的操作杆的动作方向成为相互相反方向。第一单体断路部以及第二单体断路部被配置为各自的操作机构相互对置。全部的至少一个单体断路部串联连接而形成了机械触点模块。机械触点模块的两端与直流输电系统连接。放电器与机械触点模块并联连接。换流装置具有换流电路。换流电路通过将电抗器、电容器以及接通器(日文:投入器)串联连接而形成。换流电路与机械触点模块并联连接。接通器是高速接通器。
附图说明
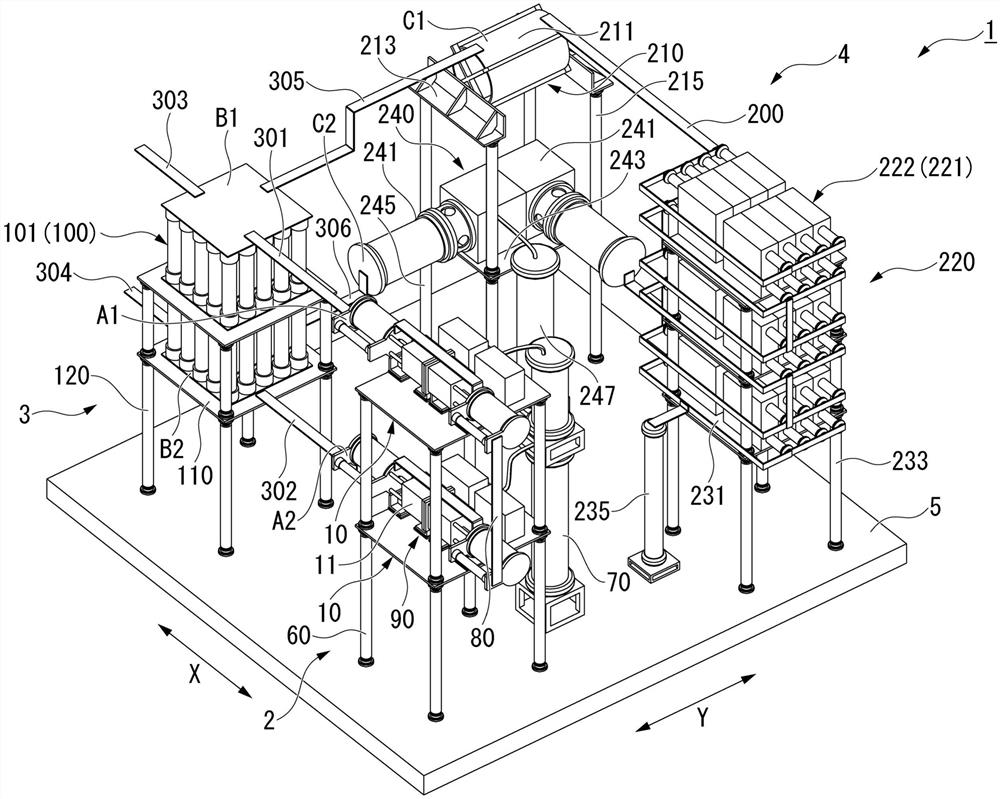
图1是表示第一实施方式的直流断路器的立体图。
图2是表示第一实施方式的直流断路器的电路图。
图3是表示第一实施方式的机械断路部的立体图。
图4是从侧面观察第一实施方式的机械断路单元的局部剖视图。
图5是表示第一实施方式的气体断路器的剖视图。
图6是表示第一实施方式的机械断路单元中的通电路径的图。
图7是表示第一实施方式的放电器部的立体图。
图8是表示第一实施方式的换流装置的立体图。
图9是表示第一实施方式的电抗器(reactor)单元以及接通器单元的立体图。
图10是表示第一实施方式的电容器单元的立体图。
图11是表示第一实施方式的接通器的局部剖视图。
图12是表示第二实施方式的接通器的局部剖视图。
图13是表示第三实施方式的直流断路器的立体图。
图14是表示第四实施方式的直流断路器的立体图。
图15是表示第五实施方式的直流断路器的立体图。
具体实施方式
以下,参照附图对实施方式的直流断路器进行说明。其中,在以下的说明中,对具有同一功能或者类似功能的构成赋予同一附图标记。而且,存在省略这些构成的重复的说明的情况。
(第一实施方式)
图1是表示第一实施方式的直流断路器的立体图。图2是表示第一实施方式的直流断路器的电路图。
如图1以及图2所示,直流断路器1具备机械断路部2、放电器部3以及换流装置4。直流断路器1被设置在大地上的地基5。地基5的上表面形成为水平。在本实施方式中,将水平的一个方向定义为第一方向,将与第一方向正交的水平方向定义为第二方向。另外,对第一方向赋予附图标记X,对第二方向赋予附图标记Y。机械断路部2以及放电器部3沿第一方向X并排配置。沿第一方向X并排配置的状态是从第一方向X观察多个对象被配置为相互重叠的状态。换流装置4相对于机械断路部2以及放电器部3沿第二方向Y并排配置。
对机械断路部2进行说明。
图3是表示第一实施方式的机械断路部的立体图。
如图3所示,机械断路部2具备多个(在本实施方式中为2个)机械断路单元10、对机械断路单元10进行支承的多个(在本实施方式中为4根)绝缘支柱60、以及对机械断路单元10供给电力的供电部70。多个机械断路单元10相对于绝缘支柱60在铅垂方向层叠有多段。
机械断路单元10具备一对单体断路部11(第一单体断路部以及第二单体断路部)、电源部12、控制部13、以及配置有一对单体断路部11电源部12及控制部13的机械断路部支承板14。
单体断路部11具备具有固定接触件22以及可动接触件23的机械触点部21(参照图4)。机械触点部21通过使可动接触件23相对于固定接触件22分离而进行断开。单体断路部11通过使机械触点部21断开,来使通过机械触点部21的通电路径断路。单体断路部11构成了真空断路器11A或者气体断路器11B。真空断路器11A具有在真空的绝缘筒24内配置了机械触点部21的真空阀20(参照图4)。气体断路器11B具有在绝缘气体中配置了机械触点部21的气体触点。真空断路器11A的机械触点部21是能够在电流零点将电流以机械式断路的触点。真空断路器11A的电流切断性能高于气体断路器11B。气体断路器11B的耐电压性能高于真空断路器11A,或者与其同等。
在各个机械断路单元10中,希望一对单体断路部11具有相同的构成。在本实施方式中,机械断路单元10仅具备真空断路器11A或者气体断路器11B。例如,上段的机械断路单元10具备一对真空断路器11A。另外,下段的机械断路单元10具备一对气体断路器11B。
图4是从侧方观察第一实施方式的机械断路单元的局部剖视图。其中,在图4中表示了具备真空断路器11A作为单体断路部11的机械断路单元10。
如图4所示,真空断路器11A具备:具有机械触点部21的真空阀20、封入真空阀20的密闭容器30、与机械触点部21的固定接触件22连结的通电轴34、与机械触点部21的可动接触件23连结的操作杆35、与操作杆35连结的操作机构37、以及与机械触点部21并联连接的电容器39(参照图3)。
真空阀20具有上述的机械触点部21、封入机械触点部21的绝缘筒24、以及设置于绝缘筒24的内侧的波纹管25。
机械触点部21的固定接触件22以及可动接触件23被设置为能够相互接触分离。固定接触件22相对于绝缘筒24被固定地配置。可动接触件23相对于绝缘筒24被设置为能够位移。在以下的与单体断路部11有关的说明中,将固定接触件22以及可动接触件23进行接触分离的方向称为触点动作方向。在本实施方式中,触点动作方向是水平的一个方向且与第一方向X平行。
绝缘筒24形成为沿触点动作方向延伸的圆筒状。绝缘筒24例如是由绝缘材料形成的绝缘管。绝缘筒24的内部被保持为真空。在绝缘筒24的第一端部形成有供通电轴34气密地插入的贯通孔。在绝缘筒24的第二端部形成有供操作杆35插入的贯通孔。
波纹管25在绝缘筒24的内部被配置为包围操作杆35。波纹管25的一端部被固定在可动接触件23的外周面。波纹管25的另一端部被固定在绝缘筒24的第二端部。波纹管25使可动接触件23以及操作杆35能够相对于绝缘筒24位移并且保持真空阀20内的真空。
密闭容器30封入有例如六氟化硫(SF
通电轴34被固定于密闭容器30的第一凸缘32。通电轴34被配置为穿过真空阀20的绝缘筒24。通电轴34将真空阀20固定地支承于密闭容器30。通电轴34在真空阀20的绝缘筒24内固定地支承固定接触件22。通电轴34由金属等导电材料形成,与固定接触件22导通。通电轴34将固定接触件22与密闭容器30的第一凸缘32导通。其中,“导通”是指多个对象相互电连接而成为同电位的状态之意。另外,即便是多个对象因所具有的阻抗而产生了电位差的情况,在电位差小到与设备的额定电压相比能够充分忽略的程度(例如,数十V以下)的情况下也处理为同电位。
操作杆35沿着触点动作方向延伸。操作杆35的第一端部在真空阀20的绝缘筒24内与可动接触件23结合。操作杆35被设置为能够相对于绝缘筒24的第二端部沿触点动作方向滑动。操作杆35从密闭容器30的内部通过设置于第二凸缘33的贯通孔33a而延伸突出至密闭容器30的外部。操作杆35被设置为在保持密闭容器30的内部的气密的同时相对于第二凸缘33导通并且能够滑动。操作杆35中的从第一端部到与第二凸缘33的滑动部的部分由金属等导电材料形成。由此,操作杆35将可动接触件23与第二凸缘33导通。在操作杆35中的位于密闭容器30外的部分的至少一部分设置有使操作杆35的两端部间电绝缘的杆绝缘部35a。
操作机构37是基于电力进行动作的响应性高的电磁促动器。电磁促动器例如是电磁排斥式的操作机构。电磁排斥式的操作机构37具有与操作杆35的第二端部连结的良导体的金属板、和设置为与金属板对置的线圈。在驱动时向线圈施加电流,使金属板产生相反方向的感应电流,对金属板赋予与线圈相反方向的电磁排斥力来使操作杆35动作。
操作机构37在密闭容器30的外侧在触点动作方向与第二凸缘33并排配置。操作机构37通过连结部件38与第二凸缘33连结。连结部件38的至少一部分由绝缘材料形成,将连结部件38的两端部间电绝缘。操作机构37使操作杆35沿触点动作方向往复动作。由此,操作机构37使相对于操作杆35固定地设置的可动接触件23位移,让可动接触件23相对于固定接触件22接触分离。
如图3所示,电容器39被配置在密闭容器30的外侧。电容器39与密闭容器30的第一凸缘32以及第二凸缘33电连接且机械连接。电容器39在高电阻的圆筒封入电介质,并在两端具备电极,具有静电电容和电阻。电容器39调整对电流切断时以及断开状态的机械触点部21(参照图4)施加的电压。
图5是表示第一实施方式的气体断路器的剖视图。
如图5所示,气体断路器11B与真空断路器11A的不同点在于,机械触点部21直接配置在密闭容器30内。即,在气体断路器11B中,在机械触点部21的断开状态下绝缘性气体介于固定接触件22以及可动接触件23之间。
如图3所示,在各机械断路单元10中,一对单体断路部11被配置为各自的操作杆35在由操作机构37实现的机械触点部21的断开动作时在同一直线上动作。具体而言,在各机械断路单元10中,各单体断路部11的操作杆35在同一直线上延伸。在本实施方式中,操作杆35在由操作机构37实现的机械触点部21的断开动作时沿第一方向X进行动作。并且,在各机械断路单元10中,一对单体断路部11被配置为由操作机构37实现的机械触点部21的断开动作时的操作杆35的动作方向为相互相反方向。具体而言,在各机械断路单元10中,一对单体断路部11被配置为各自的操作机构37相互接触。另外,一个机械断路单元10的单体断路部11、以及另一个机械断路单元10的单体断路部11被配置为从铅垂方向观察时在同一直线上动作。
电源部12向一对单体断路部11的操作机构37供给电力。电源部12被设置为基准电位与操作机构37为同电位。电源部12例如具备在机械触点部21(参照图4)的断开动作时向操作机构37供给电力的电容器、在机械触点部21的闭合动作时向操作机构37供给电力的电容器、各个电容器的充电装置、以及将各个电容器保持为充电状态并在电力供给时进行放电的开关元件(都未图示)。
控制部13进行电源部12、以及一对单体断路部11的操作机构37的状态监视。另外,控制部13对从电源部12向一对单体断路部11的操作机构37的电力供给进行控制。
机械断路部支承板14从下方支承一对单体断路部11、电源部12以及控制部13。例如,机械断路部支承板14由铝合金等金属材料形成。机械断路部支承板14形成为在俯视时呈矩形形状。机械断路部支承板14被配置为外缘的2边与触点动作方向平行。在本实施方式中,机械断路部支承板14沿第一方向X以及第二方向Y的双方向延伸。机械断路部支承板14相对于绝缘支柱60在铅垂方向上层叠多段。
在各机械断路单元10中,一对单体断路部11的密闭容器30的至少一部分在水平方向上被配置于机械断路部支承板14的外侧。换言之,当从铅垂方向观察时,一对单体断路部11的密闭容器30被配置为从机械断路部支承板14突出。其中,在图示的例子中,仅密闭容器30的一部分在水平方向上被配置于机械断路部支承板14的外侧,但也可以是密闭容器30的整体在水平方向上被配置于机械断路部支承板14的外侧。只要密闭容器30中的与固定接触件22同电位的部位(例如第一凸缘32)在水平方向上被配置于机械断路部支承板14的外侧即可。
这里,参照图3,以其他的表现来对在水平方向上配置于机械断路部支承板14的外侧进行说明。
例如,若将上述的触点动作方向当作投射线,则能够定义包括构成机械断路部支承板14的4条边中的与投射线处于扭转的位置关系的2条边的2个垂直投影面。只要密闭容器30的至少一部分从由该2个垂直投影面划分的空间(操作机构37所存在的一侧的空间)突出配置即可。
如图4所示,机械断路单元10还具备支承部15和单元内汇流条16(导通部件)。
支承部15夹设在一对单体断路部11各自与机械断路部支承板14之间。支承部15以从机械断路部支承板14浮起的状态支承单体断路部11。支承部15具备夹设在单体断路部11的第二凸缘33与机械断路部支承板14之间的一对第一支承部15A、和夹设在单体断路部11的操作机构37与机械断路部支承板14之间的一对第二支承部15B。一方的第一支承部15A具备使第二凸缘33与机械断路部支承板14的电导通断路的绝缘部15a。由此,被一方的第一支承部15A支承的单体断路部11的第二凸缘33与机械断路部支承板14电绝缘。另一方的第一支承部15A将单体断路部11的第二凸缘33与机械断路部支承板14导通。第二支承部15B将操作机构37与机械断路部支承板14导通。
单元内汇流条16将一对单体断路部11彼此串联连接。单元内汇流条16与一对单体断路部11的第二凸缘33分别电连接且机械连接。单元内汇流条16在在一对单体断路部11的操作机构37的上方以跨过一对操作机构37的方式延伸。单元内汇流条16由金属等导电材料形成。由此,单元内汇流条16将一对单体断路部11的第二凸缘33彼此导通,使一对单体断路部11的机械触点部21串联连接。
如图3所示,绝缘支柱60例如由绝缘子、聚合物、纤维强化塑料等形成。绝缘支柱60立设于地基5。绝缘支柱60沿着铅垂方向延伸。各绝缘支柱60对层叠为多段的各机械断路部支承板14的角部进行支承。绝缘支柱60使多个机械断路单元10相互电绝缘并使各机械断路单元10相对于大地电绝缘、且固定地支承各机械断路单元10。其中,各绝缘支柱60可以从下端连续延伸到上端,也可以以夹着各机械断路部支承板14的方式被分割为多个。关于后述的其他绝缘支柱也同样。
供电部70在机械断路单元10的侧方设置于地基5。供电部70被配置在机械断路单元10与换流装置4之间(参照图1)。供电部70被配置在从第二方向Y观察时与机械断路单元10重叠的位置。供电部70从地上向机械断路单元10的电源部12供给电力。供电部70在使大地与电源部12电绝缘并且使多个机械断路单元10彼此电绝缘的同时供给电力。在本实施方式中,供电部70具备上下层叠的2段的绝缘变压器。下段的绝缘变压器对下段的机械断路单元10的电源部12供给电力。上段的绝缘变压器在使下段的机械断路单元10的电源部12与上段的机械断路单元10的电源部12电绝缘的同时对上段的机械断路单元10的电源部12供给电力。此外,供电部70可以是激光供电装置、具备由经由绝缘管的空气实现的发电功能的装置等。
对机械断路单元10的通电路径进行说明。
图6是表示第一实施方式的机械断路单元中的通电路径的图。如图6所示,在单体断路部11中,若机械触点部21闭合,则第一凸缘32以及第二凸缘33导通。一对单体断路部11中的一方的单体断路部11的第二凸缘33通过第一支承部15A的绝缘部15a被切断与机械断路部支承板14と的直接的导通。另外,在各单体断路部11中,第二凸缘33通过操作杆35的杆绝缘部35a以及连结部件38被切断与操作机构37的直接的导通。并且,一对单体断路部11的第二凸缘33彼此借助单元内汇流条16而导通。因而,在一对单体断路部11中流动的电流不从一方的单体断路部11的第一凸缘32流经机械断路部支承板14以及操作机构37,而流经单元内汇流条16到达另一方的单体断路部11的第一凸缘32(参照图中箭头A)。
对机械断路部2的各部的电位进行说明。
在各机械断路单元10中,一方的单体断路部11的第二凸缘33经由第一支承部15A与机械断路部支承板14直接导通。在各机械断路单元10中,一对单体断路部11的操作机构37分别经由第二支承部15B与机械断路部支承板14导通。一对单体断路部11的第二凸缘33通过单元内汇流条16相互导通。因而,一对操作机构37与一对机械触点部21的可动接触件23以及机械断路部支承板14为同电位。具体而言,对于操作机构37而言,基准电位与机械触点部21的可动接触件23以及机械断路部支承板14成为同电位。另外,在各机械断路单元10中,由于机械断路部支承板14和大地绝缘,所以与机械断路部支承板14导通的机械触点部21也和大地电绝缘。密闭容器30由于一部分与机械触点部21导通,所以和大地电绝缘。
对机械断路单元10彼此的电连接进行说明。
如图3所示,在铅垂方向上相邻的一对机械断路单元10中,第一机械断路单元10的第一单体断路部11的第一凸缘32以及第二机械断路单元10的第二单体断路部11的第一凸缘32相互通过单元间汇流条80而串联连接。如上述那样,由于在各机械断路单元10中一对单体断路部11的机械触点部21通过单元内汇流条16串联连接,所以机械断路部2中的全部的单体断路部11串联连接。串联连接的全部的单体断路部11形成了机械触点模块90。
机械触点模块90的两端与将供给地点和需要地点连接了的直流输电系统连接。机械触点模块90具备与直流输电系统连接的第一连接点A1以及第二连接点A2。第一连接点A1以及第二连接点A2是机械触点模块90的电气端部。第一连接点A1设置于上段的机械断路单元10。第一连接点A1构成机械触点模块90中的直流输电系统的供给地点侧(直流电压源侧)的端部。第二连接点A2设置于下段的机械断路单元10。第二连接点A2构成机械触点模块90中的直流输电系统的需要地点侧的端部。
对放电器部3进行说明。
图7是表示第一实施方式的放电器部的立体图。
如图7所示,放电器部3具备放电器100、供放电器100配置的放电器支承板110、以及支承放电器支承板110的多个(在本实施方式中为4根)绝缘支柱120。
放电器100由若被施加一定电压以上则导通的多个非线形元件102形成。放电器100具备多个(在本实施方式中为2个)模块101,所述模块101由多个非线形元件102并联连接而成。放电器100通过将所述模块101串联连接而形成。
放电器支承板110逐个地支承所述模块101。因此,在本实施方式中,设置有2个放电器支承板110。放电器支承板110由铝合金等金属材料形成。放电器支承板110形成为在俯视下呈矩形形状。在本实施方式中,放电器支承板110沿第一方向X以及第二方向Y的双方向延伸。放电器支承板110相对于绝缘支柱120在铅垂方向上层叠有多段。
绝缘支柱120例如由绝缘子、聚合物、纤维强化塑料等形成。绝缘支柱120立设于地基5。绝缘支柱120沿着铅垂方向延伸。各绝缘支柱120对层叠为多段的放电器支承板110的角部进行支承。绝缘支柱120在使多个放电器支承板110相互电绝缘并且使放电器100相对于大地电绝缘的同时,固定地支承放电器支承板110以及放电器100。
放电器100具备与直流输电系统连接的第一连接点B1以及第二连接点B2。第一连接点B1以及第二连接点B2是放电器100的电气端部。第一连接点B1设置于上段的所述模块101。第一连接点B1构成放电器100中的直流输电系统的供给地点侧的端部。第二连接点B2设置于下段的所述模块101。第二连接点B2构成放电器100中的直流输电系统的需要地点侧的端部。
对换流装置4进行说明。
图8是表示第一实施方式的换流装置的立体图。
如图2以及图8所示,换流装置4具备:包括电抗器211的电抗器单元210、包括电容器组221的电容器单元220、以及包括接通器241的接通器单元240。电抗器211、电容器组221以及接通器241构成了换流电路200。换流电路200通过在电容器组221的两端串联连接电抗器211以及接通器241而形成。
如图1所示,电抗器单元210与放电器部3在第二方向Y上并排配置。电容器单元220与电抗器单元210在第一方向X上并排配置。电容器单元220与机械断路部2在第二方向Y上并排配置。接通器单元240被配置在电抗器单元210的下方。电抗器211、电容器组221以及接通器241在第二方向Y上被配置在相同的位置。
图9是表示第一实施方式的电抗器单元以及接通器单元的立体图。
如图9所示,电抗器单元210具备电抗器211、支承电抗器211的一对撑杆(stay)213、和支承一对撑杆213的多个(在本实施方式中为4根)绝缘支柱215。
电抗器211被一对撑杆213支承第二方向Y的两端部。一对撑杆213分别沿第一方向X延伸。一对撑杆213相互沿第二方向Y隔开间隔地配置。一对撑杆213被配置为当从第二方向Y观察时相互重叠。
绝缘支柱215例如由绝缘子、聚合物、纤维强化塑料等形成。绝缘支柱215立设于地基5。绝缘支柱215沿着铅垂方向延伸。绝缘支柱215支承一对撑杆213的端部。绝缘支柱215在使一对撑杆213相互电绝缘并且使电抗器211相对于大地电绝缘的同时,固定地支承一对撑杆213以及电抗器211。
图10是表示第一实施方式的电容器单元的立体图。
如图9所示,电容器单元220具备电容器组221、配置有电容器组221的电容器支承板231、支承电容器支承板231的多个(在本实施方式中为4根)绝缘支柱233、以及对电容器组221进行充电的充电部235。
电容器组221具备将多个(在本实施方式中为8个)电容器223并联连接而成的多个(在本实施方式中为3个)电容器模块222。电容器组221通过将电容器模块222串联连接而形成。由此,能够将电容器组221视为一个电容器。电容器模块222具备多个电容器223、使多个电容器223的第一端子相互导通的第一汇流条224、以及使多个电容器223的第二端子相互导通的第二汇流条225。电容器模块221彼此通过第三汇流条226电连接。
电容器支承板231逐个地支承电容器模块222。因此,在本实施方式中,设置有三个电容器支承板231。电容器支承板231由纤维强化塑料等绝缘材料、铝合金等金属材料等形成。电容器支承板231形成为在俯视下呈矩形形状。在本实施方式中,电容器支承板231沿第一方向X以及第二方向Y的双方向延伸。电容器支承板231相对于绝缘支柱233在铅垂方向上层叠有多段。
绝缘支柱233例如由绝缘子、聚合物、纤维强化塑料等形成。绝缘支柱233立设于地基5。绝缘支柱233沿铅垂方向延伸。各绝缘支柱233对层叠为多段的电容器支承板231的角部进行支承。绝缘支柱233在使多个电容器支承板231相互电绝缘并且使电容器组221相对于大地电绝缘的同时,固定地支承电容器支承板231以及电容器组221。
充电部235在电容器组221以及电容器支承板231的侧方设置于地基5。充电部235被配置在电容器组221与机械断路部2之间(参照图1)。充电部235为电阻器。充电部235将换流电路200中的电容器组221和接通器241之间与大地电连接(参照图8)。即,充电部235的第一端部与电容器组221中的接通器241侧的端部导通。充电部235的第二端部被接地。由此,能够以系统电位与接地电位的电位差来对电容器组221进行充电。
如图9所示,接通器单元240具备接通器241、配置有接通器241的接通器支承板243、支承接通器支承板243的多个(在本实施方式中为4根)绝缘支柱245、以及向接通器241供给电力的供电部247。
接通器241在直流输电系统的稳定输电时被断开而将换流电路200切断。接通器241在将直流输电系统切断时被接通而使换流电路200的两端间为导通状态。设置有至少一个接通器241。在设置多个接通器241的情况下,多个接通器241相互串联连接。在本实施方式中,设置有一对接通器241。接通器241是高速接通器。高速接通器是与通过油压、弹簧的复原力、电磁螺线管的电磁力进行驱动的机械触点相比能够高速进行接通的接通器。在本实施方式中,接通器241是通过降低被固定的一对电极251、252间的绝缘性能而使其绝缘破坏来开始通电的放电式接通器(间隙开关)(参照图11)。
图11是表示第一实施方式的接通器的局部剖视图。
如图11所示,接通器241具备第一电极251以及第二电极252、收纳第一电极251以及第二电极252的容器260、在容器260内与第一电极251接近配置的触发电极265、向第一电极251与触发电极265之间施加脉冲电压的脉冲电源267、以及将脉冲电源267与容器260连结的连结部件269。
第一电极251以及第二电极252分别形成为大致相同直径的圆柱状。第一电极251以及第二电极252在同轴上隔开间隔配置。第一电极251以及第二电极252各自中的相互对置的面形成为半球面状。在第一电极251形成有供触发电极265配置的贯通孔251a。贯通孔251a与第一电极251的中心轴线同轴形成。贯通孔251a以一定的直径贯通第一电极251。
在容器260封入有干燥空气、六氟化硫(SF
触发电极265由金属或碳等导电材料形成为前端尖细的针状。例如,作为金属的导电材料,可使用不锈钢、铜、钨等。触发电极265以前端与第二电极252对置的方式被从容器260外插入至第一凸缘262的贯通孔262a以及第一电极251的贯通孔251a。在触发电极265的外周面气密地插入绝缘支承筒271。绝缘支承筒271被气密地插入至第一凸缘262的贯通孔262a以及第一电极251的贯通孔251a各自的内周面。即,触发电极265借助绝缘支承筒271被支承于第一电极251以及第一凸缘262。触发电极265的前端在第一电极251的延伸方向被配置于与第一电极251中的第二电极252侧的端部相同的位置。
脉冲电源267以与容器260的第一凸缘262对置的方式和容器260并排配置。脉冲电源267形成为长方体状。脉冲电源267在形成外廓的壳体的内部具有电容器、电容器的充电电路、电阻、电抗器、开关器件等。从脉冲电源267延伸出第一线缆273以及第二线缆275。第一线缆273与触发电极265的基端电连接。第二线缆275与容器260的第一凸缘262电连接。若被从外部输入指令信号,则脉冲电源267向第一线缆273以及第二线缆275间输出脉冲电压。由此,由于在第一电极251与触发电极265之间发生微小放电,所以在第一电极251的周围产生等离子体。结果,第一电极251与第二电极252之间的绝缘被破坏而产生电弧,形成通过第一电极251以及第二电极252的通电路径。
连结部件269被配置在容器260与脉冲电源267之间。连结部件269由金属材料形成。连结部件269形成为与容器260大致相同直径的圆筒状。连结部件269与容器260被配置在同轴上,包围第一线缆273以及第二线缆275。连结部件269的第一端开口与容器260的第一凸缘262电连接且机械连接。连结部件269的第二端开口与脉冲电源267的壳体电连接且机械连接。由此,脉冲电源267的壳体与第一电极251成为同电位。具体而言,对于脉冲电源267而言,基准电位与第一电极251成为同电位。
如图9所示,一对接通器241沿水平方向并排配置。第一接通器241被配置为容器260相对于脉冲电源267在第一方向X上位于电容器单元220侧。第二接通器241相对于第一接通器241的脉冲电源267在放电器部3侧并排配置。第二接通器241被配置为相对于脉冲电源267容器260在第二方向Y上位于放电器部3侧。
接通器支承板243一并支承一对接通器241。接通器支承板243由铝合金等金属材料等形成。接通器支承板243形成为在俯视下呈矩形形状。在本实施方式中,接通器支承板243沿第一方向X以及第二方向Y的双方向延伸。接通器支承板243相对于绝缘支柱245在铅垂方向上层叠有多段。接通器支承板243与一对接通器241各自的脉冲电源267的壳体成为同电位。具体而言,接通器支承板243与一对接通器241各自的脉冲电源267的基准电位成为同电位。
如上述那样,接通器241的第一电极251经由连结部件269与脉冲电源267的壳体导通。另外,脉冲电源267的壳体与接通器支承板243导通。由此,由于一对脉冲电源267的壳体彼此导通,所以一对接通器241的第一电极251彼此也导通。此外,一对脉冲电源267的壳体也可以通过相互邻接而导通。因而,在接通器单元240中通过将一对接通器241接通而形成从一方的接通器241的第二凸缘263至另一方的接通器241的第二凸缘263的通电路径。此外,也可以通过利用未图示的汇流条将一对接通器241的第一凸缘262彼此连接、并借助未图示的绝缘材料将一方的接通器241的第一凸缘262与连结部件269连接,来将从一方的接通器241的第二凸缘263至另一方的接通器241的第二凸缘263的通电路径限定为未图示的汇流条。
绝缘支柱245例如由绝缘子、聚合物、纤维强化塑料等形成。绝缘支柱245立设于地基5。绝缘支柱245沿铅垂方向延伸。各绝缘支柱245对接通器支承板243的角部进行支承。在本实施方式中,绝缘支柱245与电抗器单元210的绝缘支柱215共用。绝缘支柱245在使接通器241相对于大地电绝缘的同时,固定地支承接通器支承板243以及接通器241。
供电部247在接通器241以及接通器支承板243的侧方被设置于地基5。供电部247被配置于接通器支承板243与电容器单元220之间(参照图8)。供电部247从地上向脉冲电源267供给电力。供电部247在使大地与脉冲电源267电绝缘的同时供给电力。供电部247例如是绝缘变压器。
一对接通器241的容器260在水平方向上被配置于接通器支承板243的外侧。换言之,一对接通器241的容器260被配置为在从铅垂方向观察时从接通器支承板243突出。此外,在图示的例子中,容器260的整体在水平方向上被配置在接通器支承板243的外侧,但也可以是仅容器260的一部分在水平方向上被配置在接通器支承板243的外侧。只要容器260中的与第二电极252同电位的部位(例如第二凸缘263)在水平方向上被配置于接通器支承板243的外侧即可。
如图8所示,电抗器211的电气的一端通过汇流条201与电容器组221中的直流输电系统的供给地点侧的端部电连接。所述第一接通器241的第二凸缘263通过汇流条202与电容器组221中的直流输电系统的需要地点侧的端部电连接。由此,换流电路200具有在电容器组221的两端将电抗器211以及接通器241串联连接的构成。
此外,换流电路200中的电抗器211、电容器组221以及接通器241的配置并不限定于上述的例子。只要电容器单元的充电部连接在接通器与电容器组之间即可。
换流装置4具备与直流输电系统连接的第一连接点C1以及第二连接点C2。第一连接点C1以及第二连接点C2是换流电路200的电气性的端部。第一连接点C1设置于电抗器211。第一连接点C1构成换流电路200中的直流输电系统的供给地点侧的端部。第二连接点C2设置于所述第二接通器241的第二凸缘263。第二连接点C2构成换流电路200中的直流输电系统的需要地点侧的端部。
参照图1,对机械断路部2、放电器部3以及换流装置4的电连接进行说明。
机械断路部2的第一连接点A1以及放电器部3的第一连接点B1通过汇流条301电连接。机械断路部2的第二连接点A2以及放电器部3的第二连接点B2通过汇流条302电连接。由此,放电器部3的放电器100与机械断路部2的机械触点模块90并联连接。
放电器部3的第一连接点B1通过汇流条303与直流输电系统的供给地点侧的输电线电连接。放电器部3的第二连接点B2通过汇流条304与直流输电系统的需要地点侧的输电线电连接。由此,机械断路部2的机械触点模块90构成了直流输电系统的始终通电路径。
换流装置4的第一连接点C1以及放电器部3的第一连接点B1通过汇流条305电连接。换流装置4的第二连接点C2以及放电器部3的第二连接点B2通过汇流条306电连接。由此,换流装置4的换流电路200与放电器部3的放电器100以及机械断路部2的机械触点模块90并联连接。另外,换流装置4的接通器241在换流电路200中被配置在直流输电系统的最需要地点侧。
对直流断路器1的动作进行说明。
在直流输电系统的稳定输电时,输电电流流向机械触点模块90。在该状态下,在放电器100以及换流电路200中不流动电流。另外,换流电路200的电容器组221被充电部235充电。
例如,当在直流输电系统中产生了事故电流时,由未图示的控制装置检测事故电流,对直流断路器1赋予事故断路指令,使换流电路200为导通状态。具体而言,通过未图示的控制装置对接通器单元240的脉冲电源267赋予接通指令,将一对接通器241接通。另外,将机械触点模块90的全部的单体断路部11的机械触点部21断开。具体而言,通过未图示的控制装置对机械断路单元10的控制部13赋予断开动作指令,使各单体断路部11的机械触点部21断开。此时,在各机械断路单元10中,由于一对操作杆35在同一直线上向相互相反方向动作,所以在操作机构37产生的冲击力以及反作用被抵消。
如果换流电路200成为导通状态,则充电后的电容器组221的电荷被放电。若电容器组221的电荷被放电,则由于电容器组221以及电抗器211的LC共振而使得与换流电路200并联连接的机械触点模块90的电流降低,在机械触点模块90生成电流零点。由此,在各单体断路部11的机械触点部21中电弧灭弧,通过机械触点模块90的通电路径被断路。其中,将接通器241接通的时机可以与将单体断路部11的机械触点部21断开的时机同时,也可以比将单体断路部11的机械触点部21断开的时机靠后。一般,由于接通器241比机械触点部21响应早,所以通过在上述的时机将接通器241接通,能够避免在机械触点部21完全断开之前生成电流零点。
若通过机械触点模块90的通电路径被断路,则事故电流向与机械触点模块90并联连接的放电器100换流。然后,在放电器100中事故电流的能量被吸收,直流输电系统的事故电流的断路结束。
如以上说明那样,本实施方式的直流断路器1具有将全部的单体断路部11串联连接而形成的机械触点模块90和与机械触点模块90并联连接的换流电路200。换流电路200通过将电抗器211、电容器组221以及接通器241串联连接而形成。
根据该构成,将接通器241接通来对电容器组221的电荷进行放电,通过换流电路200中的电容器组221以及电抗器211的LC共振,能够在与换流电路200并联连接的机械触点模块90生成电流零点。因此,由于不需要现有技术那样的与机械触点模块并联连接的半导体断路器,所以能够抑制设备成本。
并且,在本实施方式中,使换流装置4的接通器241为高速接通器。根据该构成,与通过油压、弹簧的复原力、电磁螺线管的电磁力进行驱动的机械触点相比能够高速地使换流电路200为导通状态。因而,能够以与现有技术那样的使用了半导体断路器的构成同等的速度将流经机械触点模块90的电流切断。
综上所述,能够提供可缩短电流的断路时间以及抑制设备成本的直流断路器1。
另外,本实施方式的接通器241是通过降低被固定的一对电极251、252间的绝缘性能而使其绝缘破坏来开始通电的放电式接通器。
根据该构成,不对接通器设置机械式的驱动部。因此,可构成与通过油压、弹簧的复原力、电磁螺线管的电磁力进行驱动的机械触点相比能够以高速接通的高速接通器。
另外,接通器241具有收纳第一电极251以及第二电极252的容器260、和被设置为与第一电极251同电位的脉冲电源267。接通器支承板243由金属材料形成,并被设置为与脉冲电源267同电位。接通器241的容器260在水平方向上被配置在接通器支承板243的外侧。
根据该构成,能够在使脉冲电源267接近接通器支承板243的同时,使容器260中的与第二电极252同电位的部位(第二凸缘263)远离接通器支承板243。因此,与容器260的整体在水平方向被上配置在与接通器支承板243重叠的位置的情况相比,能够使容器260中的与第二电极252同电位的部位和接通器支承板243绝缘,并且使接通器241与接通器支承板243在铅垂方向接近。因此,能够抑制配置有接通器241以及接通器支承板243的空间向铅垂方向的大型化。
另外,换流装置4具备将电容器组221和接通器241之间与大地电连接的电阻器(充电部235)。
根据该构成,由于直流输电系统的系统电位与接地电位的电位差施加于电容器组221,所以能够对电容器组221进行充电。因此,与另外设置对电容器组进行充电的直流电源等的情况相比,能够简化直流断路器1的构成。因此,能够进一步抑制直流断路器1的设备成本。
另外,机械断路部2以及放电器部3(放电器100)在第一方向X上并排配置。换流装置4相对于机械断路部2以及放电器部3在第二方向Y上并排配置。
根据该构成,与机械断路部、放电器部以及换流装置沿一条直线并排配置的情况相比,能够将机械断路部2、放电器部3以及换流装置4汇集配置。因此,能够实现直流断路器1的设置面积的削减。
另外,电抗器单元210、电容器单元220以及接通器单元240被配置在第二方向Y上的相同的位置。
根据该构成,与当从第一方向X观察时电抗器单元、电容器单元以及接通器单元的任意一个沿第二方向Y排列的情况相比,能够减小换流装置4在第二方向Y上占据的空间。因而,能够将机械断路部2、放电器部3以及换流装置4进一步汇集配置。
另外,机械断路部2具备向单体断路部11的操作机构37供给电力的供电部70。供电部70具备绝缘变压器。绝缘变压器被配置在机械断路单元10与换流装置4之间。
根据该构成,能够有效地灵活运用机械断路单元10与换流装置4之间的空间而抑制直流断路器1的设置面积的增大。
另外,单体断路部11具有:机械触点部21,具有固定接触件22以及可动接触件23并与大地电绝缘;密闭容器30,封入机械触点部21以及绝缘性气体并与大地电绝缘;操作杆35,与可动接触件23连结;以及操作机构37,与操作杆35连结并被设置为与可动接触件23同电位。
根据该构成,由于密闭容器30不与大地接地,所以能够省略密闭容器30与机械触点部21的绝缘。因而,与密闭容器通过和大地接地等来相对于机械触点部电绝缘的情况相比,能够使密闭容器30小型化、抑制单体断路部11的大型化。另外,即便在伴随着高电压化而将多个单体断路部11串联连接来使断路性能提高的情况下,也能够抑制串联连接的全部的单体断路部11的大型化。因此,能够提供高电压化容易、可抑制大型化的直流断路器1。
并且,根据上述构成,由于密闭容器30以及操作机构37不与大地接地,所以不需要对机械触点部21与操作机构37进行绝缘。因此,与操作机构通过和大地接地等来相对于机械触点部电绝缘的情况相比,能够将机械触点部21与操作机构37接近配置。由此,能够抑制操作杆35的长条化,并且抑制操作机构37的可动部的质量的增加,能够抑制机械触点部21的断开速度的降低。因此,可提供能够确保断路动作的响应性的直流断路器1。
另外,各机械断路单元10中的一对单体断路部11被配置为各自的操作杆35通过操作机构37在同一直线上动作,并且操作机构37对操作杆35的动作方向为相反方向。
根据该构成,在各机械断路单元10的机械断路部支承板14上,能够将使操作杆35动作时操作机构37所产生的冲击力以及反作用抵消。由此,在操作机构37动作时,能够抑制在对机械断路单元10进行支承的绝缘支柱60产生弯曲力矩。因此,能够抑制机械断路部2的振动,可抑制绝缘支柱60的过度的大型化、支承构造物的增加、以及与这些相伴的重量的增加。
另外,配置于机械断路部支承板14的一对单体断路部11被配置为各自的操作机构37相互接触。
根据该构成,与各自的密闭容器30相互接触的构成相比,在将使操作杆35动作时在操作机构37产生的冲击力以及反作用抵消的状况下,能够不经由通过强度比较低的绝缘管构成的密闭容器30来将冲击力以及反作用抵消,而在通过强度比较高的金属材料构成的操作机构37间直接抵消冲击力以及反作用。因而,能够防止对密闭容器30施加大的力。由此,能够抑制单体断路部11的破损,可使机械断路单元10的可靠性提高。
另外,由于多个机械断路单元10相对于绝缘支柱60层叠为多段,所以与机械断路单元在水平方向上并排配置的情况相比,能够削减直流断路器1的设置面积。
另外,机械断路单元10具备配置有一对单体断路部11的由绝缘支柱60支承的机械断路部支承板14。机械断路部支承板14由金属材料形成,并被设置为与一对单体断路部11的操作机构37同电位。一对单体断路部11各自的密闭容器30的至少一部分在水平方向上被配置于机械断路部支承板14的外侧。
根据该构成,能够使操作机构37接近机械断路部支承板14,并且使密闭容器30中的与固定接触件22同电位的部位(第一凸缘32)远离机械断路部支承板14。因此,与密闭容器30的整体在水平方向上被配置于与机械断路部支承板14重叠的位置的情况相比,能够使密闭容器30中的与固定接触件22同电位的部位和机械断路部支承板14绝缘,并且使单体断路部11与机械断路部支承板14在铅垂方向上接近。因此,能够抑制机械断路部2向铅垂方向的大型化,并且能够抑制在对机械断路单元10进行支承的绝缘支柱60产生的弯曲力矩。
另外,单体断路部11的操作杆35具有将可动接触件23与操作机构37的导通切断的杆绝缘部35a。机械断路单元10具有单元内汇流条16和绝缘部15a。单元内汇流条16将一对单体断路部11各自的第二凸缘33相互电连接。绝缘部15a设置于夹设在一方的单体断路部11的第二凸缘33与机械断路部支承板14之间的支承部15。绝缘部15a将所述一方的单体断路部11的第二凸缘33与机械断路部支承板14的导通切断。另一方的单体断路部11的第二凸缘33与机械断路部支承板14通过第一支承部15A而导通。
根据该构成,在单体断路部11中,从第二凸缘33通过操作杆35而到达操作机构37的通电路径被杆绝缘部35a切断。另外,在机械断路单元10中,从一方的第二凸缘33通过机械断路部支承板14而到达另一方的第二凸缘33的通电路径被支承部15的绝缘部15a切断。因而,在机械断路单元10中通过一对单体断路部11的通电路径形成于单元内汇流条16。由此,能够避免例如在机械断路部支承板14或者操作机构37的附近等不希望的部位发生部分放电、绝缘破坏。因此,能够使机械断路单元10的可靠性提高。
此外,由于另一方的单体断路部11的第二凸缘33和机械断路部支承板14通过第一支承部15A而导通,所以能够将可动接触件23与操作机构37と设置为同电位。
(第二实施方式)
图12是表示第二实施方式的接通器的局部剖视图。
图12所示的第二实施方式与第一实施方式的不同点在于,取代第一实施方式的接通器241而具备接通器341。此外,以下说明之外的构成与第一实施方式相同。
如图12所示,接通器341为高速接通器。高速接通器是与通过油压、弹簧的复原力、电磁螺线管的电磁力进行驱动的机械触点相比能够以高速接通的接通器。在本实施方式中,接通器341是通过降低被固定的一对电极351、352间的绝缘性能而使其绝缘破坏从而开始通电的放电式接通器。
接通器341替代第一实施方式的接通器241中的第一电极251、第二电极252、容器260以及触发电极265而具备第一电极351、第二电极352、容器360以及触发电极365。
第一电极351以及第二电极352除了在第一电极351不形成贯通孔这一点之外,与第一实施方式的第一电极251以及第二电极252同样地形成。
容器360收纳第一电极351以及第二电极352。在容器360中封入有干燥空气、六氟化硫(SF
触发电极365被配置为包围第一电极351与第二电极352的空隙。触发电极365由金属或碳等导电材料形成。例如,作为金属的导电材料,可使用不锈钢、铜、钨等。触发电极365形成为圆环状,与第一电极351以及第二电极352同轴配置。触发电极365被固定地支承于容器360的绝缘筒361。触发电极365的内周部形成为从径向外侧朝向内侧逐渐变薄。触发电极365与第一电极351以及第二电极352电绝缘。在触发电极365的外周部电连接有从脉冲电源267延伸的第一线缆273。
若被从外部输入指令信号,则脉冲电源267向第一线缆273以及第二线缆275间输出脉冲电压。由此,电场集中在第一电极351与触发电极365之间,第一电极351与第二电极352之间的电场发生失真(日文:歪み)。结果,第一电极351与第二电极352之间的绝缘被破坏而产生电弧,形成通过第一电极351以及第二电极352的通电路径。
如以上说明那样,本实施方式的接通器341是通过降低被固定的一对电极351、352间的绝缘性能而使其绝缘破坏来开始通电的放电式接通器。根据该构成,能够起到与第一实施方式相同的作用效果。
(第三实施方式)
图13是表示第三实施方式的直流断路器的立体图。
图13所示的第三实施方式与第一实施方式的不同点在于,替代第一实施方式的电容器单元220中的充电部235而具备充电部335。此外,以下说明之外的构成与第一实施方式相同。
如图13所示,充电部335在电容器组221以及电容器支承板231的侧方被设置于地基5。充电部335具备直流电源336和向直流电源336供给电力的绝缘变压器337。
直流电源336与电容器组221的两端电连接。直流电源336通过向电容器组221的两端施加电压来对电容器组221进行充电。直流电源336被多个(在本实施方式中为4根)绝缘支柱338支承。绝缘支柱338使直流电源336与大地电绝缘,并且固定地支承直流电源336。绝缘变压器337在直流电源336的下方设置于地基5。绝缘变压器337被配置在当从铅垂方向观察时由多个绝缘支柱338包围的区域。绝缘变压器337从地上向直流电源336供给电力。绝缘变压器337在使大地与直流电源336电绝缘的同时供给电力。
如以上说明那样,本实施方式的充电部335具备向电容器组221的两端施加电压的直流电源336。根据该构成,能够对电容器组221进行充电。因此,可起到与第一实施方式相同的作用效果。
(第四实施方式)
图14是表示第四实施方式的直流断路器的立体图。
图14所示的第四实施方式与第一实施方式的不同点在于,取代第一实施方式的接通器单元240而具备接通器单元440。此外,以下说明之外的构成与第一实施方式相同。
如图14所示,接通器单元440具有取代第一实施方式的接通器241而在接通器支承板243配置有接通器441、电源部462以及控制部463的构成。
设置有至少一个接通器441。在设置有多个接通器441的情况下,多个接通器441相互串联连接。在本实施方式中,设置有一对接通器441。接通器441为高速接通器。高速接通器是与通过油压、弹簧的复原力、电磁螺线管的电磁力进行驱动的机械触点相比能够以高速接通的接通器。在本实施方式中,接通器441是通过电磁排斥力对相互分离的一对接触件进行驱动而使其接触、通电的机械式接通器。
接通器441具有与图4所示的单体断路部11类似的构成。接通器441除了由接通器用操作机构437引起的可动接触件23(参照图4)的动作方向不同以外,与单体断路部11同样地形成。接通器441的机械触点部21(参照图4)在直流输电系统的稳定输电时断开来切断换流电路200。机械触点部21在将直流输电系统断开时被闭合而使换流电路200的两端间为导通状态。接通器用操作机构437是电磁排斥式的操作机构。接通器用操作机构437具有与操作杆35(参照图4)连结的良导体的金属板和设置为与金属板对置地设置的线圈。在使机械触点部21闭合时(即,将接通器441接通时),对线圈施加电流,使金属板产生相反方向的感应电流,对金属板赋予与线圈相反方向的电磁排斥力来使操作杆35动作。其中,机械触点部21可以是上述的真空阀20的触点,也可以是气体触点。
一对接通器441被配置为各自的操作杆35在由接通器用操作机构437引起的机械触点部21的闭合动作时在同一直线上动作。具体而言,各接通器441的操作杆35在同一直线上延伸。在本实施方式中,操作杆35在由接通器用操作机构437引起的机械触点部21的闭合动作时向第二方向Y动作。并且,接通器441被配置为由接通器用操作机构437引起的机械触点部21的闭合动作时的操作杆35的动作方向为相互相反方向。具体而言,一对接通器441被配置为各自的接通器用操作机构437相互接触。
电源部462向一对接通器441的接通器用操作机构437供给电力。电源部462被设置为基准电位与接通器用操作机构437为同电位。电源部462例如具备在接通器441的机械触点部21的断开动作时向接通器用操作机构437供给电力的电容器、在接通器441的机械触点部21的闭合动作时向接通器用操作机构437供给电力的电容器、各个电容器的充电装置、以及将各个电容器保持为充电状态并在电力供给时进行放电的开关元件(都未图示)。电源部462被从供电部247供给电力。
控制部463进行电源部462以及一对接通器441的接通器用操作机构437的状态监视。另外,控制部463对从电源部462向一对接通器441的接通器用操作机构437的电力供给进行控制。
一对接通器441的密闭容器30的至少一部分在水平方向上被配置于接通器支承板243的外侧。换言之,一对接通器441的密闭容器30被配置为当从铅垂方向观察时从接通器支承板243突出。此外,在图示的例子中,仅将密闭容器30的一部分在水平方向上配置于接通器支承板243的外侧,但也可以将密闭容器30的整体在水平方向上配置于接通器支承板243的外侧。只要密闭容器30中的与固定接触件22同电位的部位(例如第一凸缘32)在水平方向上被配置于接通器支承板243的外侧即可。
在一对接通器441与接通器支承板243之间夹设有支承部465。支承部465与机械断路单元10中的支承部15同样地构成。另外,一对接通器441彼此通过汇流条466串联连接。汇流条466与机械断路单元10中的单元内汇流条16同样地构成。通过这些,使得接通器单元440中的通电路径以及接通器单元440的各部的电位与机械断路部2相同。
如以上说明那样,本实施方式的接通器441是通过电磁排斥力对相互分离的一对接触件进行驱动而使其接触、通电的机械式接通器。根据该构成,可构成与通过油压、弹簧的复原力、电磁螺线管的电磁力进行驱动的机械触点相比能以高速接通的高速接通器。因此,能够起到与第一实施方式相同的作用效果。
另外,接通器支承板243由金属材料形成,被设置为与一对接通器441的接通器用操作机构437同电位。一对接通器441各自的密闭容器30的至少一部分在水平方向上被配置于接通器支承板243的外侧。
根据该构成,能够使接通器用操作机构437接近接通器支承板243,并且使密闭容器30中的与固定接触件22同电位的部位(第一凸缘32)远离接通器支承板243。因此,与密闭容器30的整体在水平方向上被配置于与接通器支承板243重叠的位置的情况相比,能够使密闭容器30中的与固定接触件22同电位的部位和接通器支承板243绝缘,并且使接通器441与接通器支承板243在铅垂方向接近。因此,能够抑制被配置接通器441以及接通器支承板243的空间向铅垂方向的大型化。
(第五实施方式)
图15是表示第五实施方式的直流断路器的立体图。
图15所示的第五实施方式与第一实施方式的不同点在于,机械断路部2、放电器部3以及换流装置4沿一条直线并排配置。此外,以下说明之外的构成与第一实施方式相同。
如图15所示,在本实施方式中,机械断路部2、放电器部3以及换流装置4沿第一方向X并排配置。在机械断路部2中,各机械断路单元10的一对单体断路部11的密闭容器30被配置为从机械断路部支承板14向第一方向X突出。在机械断路部2中,供电部70相对于机械断路单元10被配置于第二方向Y上的一方。放电器部3与机械断路部2相邻。即,放电器部3被配置在机械断路部2与换流装置4之间。
换流装置4被配置为电抗器单元210以及接通器单元240与电容器单元220沿第一方向X并列。电抗器单元210以及接通器单元240被配置在放电器部3与电容器单元220之间。在电抗器单元210中,电抗器211被一对撑杆213支承第一方向X的两端部。在电容器单元220中,充电部235相对于电容器支承板231被配置在第二方向Y的所述一方。在接通器单元240中,一对接通器241的容器260被配置为从接通器支承板243向第一方向X突出。在接通器单元240中,供电部247相对于接通器支承板243被配置在第二方向Y的所述一方。
如以上说明那样,在本实施方式中,机械断路部2、放电器部3以及换流装置4沿第一方向X并排配置。
根据该构成,即便是海上平台等布局受限那样的场所,例如即便是如第一实施方式那样无法将机械断路部2、放电器部3以及换流装置4汇集配置的场所,也能够配置直流断路器1。
此外,在上述实施方式中,作为放电式接通器的例子,说明了通过发生微小放电来引起绝缘破坏的触发管方式、以及通过使电场失真来引起绝缘破坏的电场失真方式,但并不限定于此。例如,作为放电式接通器,也可以应用通过向电极间照射激光而使绝缘介质电离来引起绝缘破坏的激光触发方式。但是,由于激光振荡装置价格高,所以从抑制设备成本这一观点考虑,触发管方式以及电场失真方式是有利的。另外,由于在触发管方式中因微小放电而触发电极容易损耗,所以从接通器的寿命的观点考虑,电场失真方式以及激光触发方式是有利的。
另外,在上述实施方式中,接通器单元具备一对接通器,但并不限定于此。接通器单元可以只具备一个接通器,也可以具备3个以上。另外,接通器单元可以具备放电式接通器以及机械式接通器双方。
另外,在上述实施方式中,机械断路单元10具备一对单体断路部11,但并不限定于此。机械断路单元可以只具备一个单体断路部,也可以具备3个以上。另外,机械断路部可以只具备真空断路器11A或者只具备气体断路器11B作为单体断路部11。
根据以上说明的至少一个实施方式,将电抗器、电容器组以及接通器串联连接而形成了与机械触点模块并联连接的换流电路。由此,由于不需要现有技术那样的与机械触点模块并联连接的半导体断路器,所以能够抑制设备成本。并且,由于使换流装置的接通器为高速接通器,所以能够以与现有技术那样的使用了半导体断路器的构成同等的速度来将流经机械触点模块的电流切断。综上所述,可提供能够缩短电流的断路时间以及抑制设备成本的直流断路器。
对本发明的几个实施方式进行了说明,但这些实施方式只是例示,并不意图限定发明的范围。这些实施方式能够通过其他各种方式加以实施,在不脱离发明主旨的范围能够进行各种省略、置换、变更。这些实施方式及其变形与包含于发明的范围、主旨同样地包含在技术方案所记载的发明及其等同的范围。
- 直流断路器、直流断路器用的机械断路装置、以及直流断路器用的半导体断路装置
- 一种直流断路器用支路组件、直流断路器