车辆控制装置、车辆控制方法以及车辆追随行驶系统
文献发布时间:2023-06-19 11:55:48
技术领域
本发明涉及能够应用于基于非机械连结的追随行驶的车辆控制装置、车辆控制方法以及车辆追随行驶系统。
背景技术
专利文献1的队列行驶控制装置在从前方车接收到数据的情况下,向本车赋予将前方车的识别编号以规定规则进行变换而得到的识别编号,根据被赋予的识别编号来控制本车的行驶。
在专利文献2的车辆行驶控制装置中,前头车辆基于车队的车辆台数来决定各车辆从前头起为第几台,并广播发送所决定的信息
现有技术文献
专利文献
专利文献1:日本特开平9-081899号公报
专利文献2:日本特开2011-170555号公报
发明内容
发明要解决的课题
然而,在前车反复进行将包含本车的制动驱动、转向的状态等在内的车辆信息向紧随其后的后续车传递的处理且多个后续车辆分别基于紧接在前的前方车辆的车辆信息进行追随行驶的追随行驶系统的情况下,越是位于后方的车辆,行驶控制的延迟越累积,控制不稳定有可能放大。
另一方面,在将头车的车辆信息从头车朝向多个后续车通过广播通信进行传递且多个后续车分别基于头车的车辆信息进行追随行驶的系统中,越是距头车的距离远的后续车,来自头车的接收功率(换言之,接收强度)越降低。而且,若接收功率降低,则有可能因信息传递的延迟增加、通信失败而产生控制不稳定、通信不稳定。
即,在任何追随行驶系统的情况下,若伴随着连结台数的增加而使得队列变长,则有可能产生控制不稳定、通信不稳定。
用于解决课题的方案
本发明的目的在于提供一种车辆控制装置、车辆控制方法以及车辆追随行驶系统,在基于非机械连结的追随行驶中,即便随着连结台数的增加而队列变长,也能够抑制控制不稳定、通信不稳定。
根据本发明的一方案,其特征在于,在车辆追随行驶系统中,第一车辆、比所述第一车辆靠后的后续的第二车辆、以及比所述第二车辆靠后的后续的第三车辆非机械地连结而进行追随行驶,在所述车辆追随行驶系统中的所述第三车辆中,选择性地取得包含与所述第一车辆的运动相关的第一物理量的第一车辆信息和包含与所述第二车辆的运动相关的第二物理量的第二车辆信息。
根据本发明的一方案,在基于非机械连结的追随行驶中,即便随着连结台数的增加而队列变长,也能够抑制控制不稳定、通信不稳定。
附图说明
图1是头车和后续车的功能框图。
图2是表示队列中的车间通信的状态的图。
图3是基于接收功率的车辆信息的选择处理的功能框图。
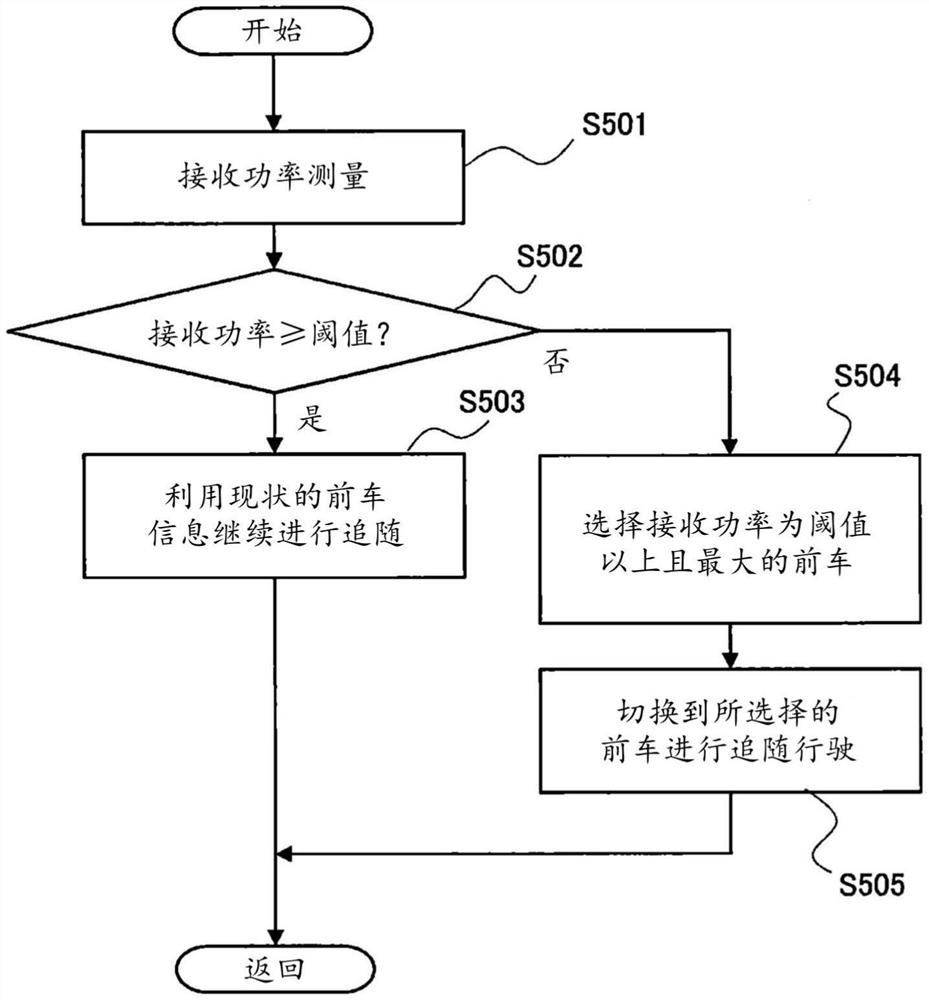
图4是表示基于接收功率的车辆信息的选择处理的顺序的流程图。
图5是基于通信链路的车辆信息的选择处理的功能框图。
图6是表示基于通信链路的车辆信息的选择处理的顺序的流程图。
图7是基于通信延迟时间的车辆信息的选择处理的功能框图。
图8是表示基于通信延迟时间的车辆信息的选择处理的顺序的流程图。
图9是表示基于通信状态的车辆信息的取得来源的切换的图。
图10是基于车辆规格信息的比较的车辆信息的选择处理的功能框图。
图11是表示基于车辆规格信息的比较的车辆信息的选择处理的顺序的流程图。
具体实施方式
以下,基于附图对本发明的车辆控制装置、车辆控制方法以及车辆追随行驶系统的实施方式进行说明。
图1是在基于非机械连结的追随行驶(换言之,基于电子连结的队列行驶)中构成队列的头车100和后续车200的功能框图。
需要说明的是,后续车200是在构成队列的多个车辆中从前头起第二台以后的车辆,所有的后续车200具备图1所示的功能块。
图2例示追随行驶状态,从前头起依次以作为第一台的第一车辆、作为第二台的第二车辆、作为第三台的第三车辆、作为第四台的第四车辆、作为第五台的第五车辆的顺序形成队列。
在此,图2的第一车辆是驾驶员进行驾驶操作的头车100。
另外,图2的第二车辆以后、即第二台以后是后续车200。
后续车200搭载实施追随行驶控制的车辆控制装置。
后续车200的车辆控制装置通过车辆之间的无线通信从前车接收包含与前车的运动相关的物理量的车辆信息,基于接收到的前车的车辆信息(换言之,前车信息)和本车辆的状况来运算本车辆的控制操作量,以便追随前车行驶,将基于运算出的控制操作量的指令输出到本车辆的制动驱动装置、转向装置等,对本车辆的制动驱动、转向进行控制。
需要说明的是,与前车的运动相关的物理量包含前车的制动驱动、转向等的控制操作量、前车的车速、加速度等行驶状态量。
头车100具备包括车辆信息处理部110以及通信控制部120的车辆控制装置130。
车辆信息处理部110(运动状态取得部)对包含加速踏板112、制动踏板113、方向盘114各自的由驾驶员111进行操作的操作量即控制操作量、头车100的车速、加速度等行驶状态量、头车100的车辆规格信息115等在内的本车的车辆信息进行处理。
需要说明的是,车辆规格信息115包含车辆尺寸(宽度、高度、长度)、车辆重量、动力机的总排气量等信息。
通信控制部120将车辆信息处理部110处理后的本车的车辆信息与识别本车的识别编号等识别码116组合而作为前车信息通过无线通信向后续车200发送。
在此,头车100构成为能够与所有的后续车200进行无线通信(参照图2)。
后续车200具备车辆控制装置201,该车辆控制装置201包括通信控制部210、前车识别部220、目标轨道生成部230、车辆运动控制部240、致动器控制部250、车辆信息处理部260(驾驶状态取得部)。
在此,前车识别部220、目标轨道生成部230、车辆运动控制部240、致动器控制部250构成如下的控制单元,该控制单元选择性地取得前车的车辆信息,基于所选择的车辆信息求出与本车的运动相关的物理量,基于求出的物理量向制动驱动装置、转向装置输出指令。
需要说明的是,图1所示的、头车100和后续车200的各功能块通过基于车辆控制装置130、201具备的微型计算机(CPU)的软件的执行、或者基于微型计算机(CPU)的软件的执行与硬件部件的组合来实现。
通信控制部210通过车辆之间的无线通信来接收从前车发送的车辆信息以及该前车的识别码。
前车识别部220使用雷达、照相机对前车进行识别,取得与前车的相对距离、相对速度、相对角度等前车识别信息。
目标轨道生成部230基于通信控制部210接收到的前车的车辆信息、前车识别部220取得的前车识别信息等,生成用于追随前车的行驶轨道的与本车的目标轨道相关的信息。
车辆运动控制部240取得目标轨道生成部230生成的与目标轨道相关的信息,计算针对本车的车辆运动(制动驱动、转向)的控制指令,以使本车追随目标轨道行驶。
致动器控制部250基于车辆运动控制部240的控制指令(第三物理量),计算与本车的制动驱动以及转向相关的驱动转矩指令、制动液压指令以及转向角指令。
接着,致动器控制部250将驱动转矩指令输出到驱动装置270,将制动液压指令输出到制动装置280,将转向角指令输出到转向装置290,从而对本车的制动驱动以及转向进行控制。
需要说明的是,驱动装置270以及制动装置280是制动驱动装置。
另外,车辆信息处理部260对包含致动器控制部250的驱动转矩指令、制动液压指令、转向角指令的各控制操作量、本车的车速、加速度等行驶状态量、本车的车辆规格信息203等在内的车辆信息进行处理。即,车辆信息处理部260对包含控制操作量、行驶状态量等与本车的运动相关的物理量、以及本车的车辆规格信息203等在内的车辆信息进行处理。
接着,通信控制部210将由车辆信息处理部260处理后的本车的车辆信息与识别本车的识别码202组合而作为车辆信息以无线方式发送。
在此,后续车200的通信控制部210具备在存在多个前车的情况下选择取得车辆信息的前车的功能,换言之,具备从多个前车发送的多个车辆信息中选择性地取得车辆信息的功能。
对于紧接着头车100之后的第二台后续车200而言,由于前车仅是头车100,因此,上述第二台后续车200基于头车100的车辆信息(头车信息)进行追随行驶。
与此相对,对于第三台以后的后续车200而言,由于前车存在两台以上,因此,实施选择取得车辆信息的前车的处理。
例如,第三台后续车200构成为能够切换为从头车100取得车辆信息(包含与第一车辆的运动相关的第一物理量的第一车辆信息)的状态和从第二台行驶的前车、换言之紧靠本车之前行驶的前车取得车辆信息(包含与第二车辆的运动相关的第二物理量的第二车辆信息)的状态。
后续车200的通信控制部210能够在控制稳定的范围内、通信稳定的范围内任意地决定取得多个前车中的哪个前车的车辆信息,另外,也可以设置具备检测/监视无线通信的状态的构件等选择条件,根据无线通信的状态自动切换并选择。
需要说明的是,后续车200的通信控制部210基于与车辆信息一起发送的识别码,判断是来自队列的第几台前车的车辆信息。
另外,后续车200的通信控制部210能够具有对从其他车辆接收到的车辆信息以及识别码进行中继并向另外的其他车辆发送的车辆信息的中继机能。
另外,例如,后续车200的通信控制部210也可以具备如下功能:不将接收到的前车的车辆信息作为本车的追随行驶控制信息进行处理,而直接对其进行中继并向其他后续车200转送。
需要说明的是,作为车辆的识别码,能够使用CAN(Controller Area Network:控制器局域网)信息所包含的车辆固有的信息,另外,能够将通信控制部120、210的通信设备固有的MAC地址(物理地址)、单独地设定于通信控制部120、210的IP地址作为识别信息。
另外,车辆的识别码中能够包含事先决定的行驶顺序的信息。
例如,通信控制部120、210具有行驶顺序的信息作为内部表,通过参照该行驶顺序的信息,能够识别是在本车的几台前方行驶的前方车辆的车辆信息,同样地,能够识别是在本车的几台后方行驶的后续车辆的车辆信息。
另外,通信控制部120、210具有的行驶顺序的信息可以构成为能够从外部通过通信进行改写。例如,可以构成为,经由网络基础设施通过从路侧机向该车辆的路车间通信来传递来自运行管理系统等的行驶顺序信息,通过接收到的信息来改写通信控制部120、210具有的行驶顺序表等行驶顺序的信息。
在该情况下,能够将从运行管理系统等接收到行驶顺序信息的任意的车辆、例如头车100作为队列车队的指挥而向后续的全部车辆发送行驶顺序信息的改写指示。
图2表示进行基于非机械连结的追随行驶的队列中的车辆之间的车辆信息的无线通信(车间通信)的情形。
在图2中,表示第一车辆为头车,以第一车辆、第二车辆、第三车辆、第四车辆、第五车辆的行驶顺序构成队列而追随行驶的状态。
在基于非机械连结的追随行驶中,后续车200取得包含前车的制动驱动状态、转向状态等控制操作量的车辆信息,并基于所取得的车辆信息来控制自动的追随行驶。在此,后续车200选择性地取得多个前车的车辆状态。
例如,在图2中,第三车辆以后的后续车200如上所述,从多个前车选择性地取得车辆信息,并基于所取得的车辆信息进行追随行驶控制。
需要说明的是,车辆信息的选择性取得包括:选择接收用于本车的追随行驶的信息的前车;以及分别取得多个前车的车辆信息,并从这些多个车辆信息中选择用于本车的追随行驶控制的车辆信息。
关于车辆信息的选择性取得的详细情况,在后面详细说明。
另外,构成队列的各车辆能够对所取得的前车的车辆信息进行中继并向后续的车辆交接,另外,能够将后续的车辆的车辆信息向前车进行中继并交接。
例如,在图2所示的队列中,第三车辆能够对第一车辆或第二车辆的车辆信息进行中继并向第四车辆或第五车辆交接,相反,能够对第四车辆或第五车辆的车辆信息进行中继并向第一车辆或第二车辆交接。
以下,对在至少两台以上的前车(第一车辆、第二车辆)之后的车辆(第三车辆)中通信控制部210实施的车辆信息的选择性取得进行详细说明。
如图3所示,通信控制部210具备接收功率测定部211A以及取得信息选择部211B,能够基于车间通信中的接收功率(接收强度)来实施车辆信息的选择性取得。
接收功率测定部211A测定与前车的车间通信中的接收功率,并将接收功率的测定数据的信息输出到取得信息选择部211B。
取得信息选择部211B基于接收功率的测定数据动态地切换取得的车辆信息,从而自动选择在通信稳定的范围内取得车辆信息的前车。
图4的流程图表示具备接收功率测定部211A以及取得信息选择部211B的通信控制部210实施的车辆信息的选择处理的顺序。
通信控制部210在步骤S501中随时测量前车发送的车辆信息信号的接收功率。
接着,通信控制部210在接下来的步骤S502中,对来自在当前时刻取得用于追随行驶控制的车辆信息的前车的接收功率的测定数据与阈值进行比较。
需要说明的是,通信控制部210与接收功率的测定数据进行比较的阈值是基于能够确保车辆通信的稳定性的接收功率的下限值的值,适合于如下情形:如果接收功率的测定数据为阈值以上,则能够确保通信稳定,若接收功率的测定数据低于阈值,则能够推定为存在通信不稳定的可能性。
在来自在当前时刻取得车辆信息的前车的接收功率的测定数据为阈值以上的情况下,通信控制部210从步骤S502进入步骤S503,将取得车辆信息的前车维持为现状而继续进行追随行驶控制。
即,在处于通过接收功率为阈值以上的车间通信取得车辆信息的状态的情况下,通信控制部210不变更车辆信息的取得来源而维持现状。
另一方面,在来自取得车辆信息的前车的接收功率的测定数据低于阈值的情况下,通信控制部210从步骤S502进入步骤S504。
通信控制部210在步骤S504中,在除了在当前时刻作为车辆信息的取得对象的前车之外的其他前车中,选择接收功率的测定数据为阈值以上且接收功率的测定数据最大的前车,并以从所选择的前车取得车辆信息的方式切换车辆信息的取得来源。
接着,通信控制部210在接下来的步骤S505中,从新选择的前车取得车辆信息,并基于所取得的车辆信息来实施追随行驶控制。
例如,在第三台车辆(第三车辆)从头车100(第一车辆)取得车辆信息(第一车辆信息)的状态下,若来自头车100的接收功率低于阈值,则第三台车辆的通信控制部210(第三通信控制部)将车辆信息的取得来源切换为接收功率为阈值以上的第二台车辆(第二车辆),第三台车辆基于来自第二台的车辆信息(第二车辆信息)来实施追随行驶控制。
即,当将头车100设为第一车辆,将第二台设为第二车辆时,头车100的车辆信息处理部110相当于取得与第一车辆的运动相关的物理量的第一驾驶状态取得部,头车100的通信控制部120相当于第一通信控制部。另外,第二台车辆信息处理部260相当于取得与第二车辆的运动相关的物理量的第二驾驶状态取得部,第二台通信控制部210相当于第二通信控制部。
另外,例如,在第四台车辆(第三车辆)从头车100(第一车辆)取得车辆信息的状态下,若来自头车100的接收功率低于阈值,则第四台车辆的通信控制部210选择第二台和第三台中的接收功率更大的一方的前车(第二车辆)作为车辆信息的取得来源。
即,通信控制部210对通信状态进行检测/监视,当与初始状态下的车辆信息的取得来源的通信中的接收功率低于阈值时,将车辆信息的取得来源切换为接收功率为阈值以上且接收功率最高的前车,继续进行追随行驶控制。
需要说明的是,通信控制部210例如能够将多个前车中的、接收功率的测定数据为阈值以上且位于更前头侧的车辆选择为取得车辆信息的前车。
另外,通信控制部210将取得车辆信息的前车的标准确定为例如头车100,在来自头车100的接收功率超过阈值的期间,能够从头车100取得车辆信息。
根据基于该接收功率的测定数据的选择处理,即便因某种原因而接收功率下降,也新选择在通信稳定的范围内取得车辆信息的前车,因此,能够抑制因通信延迟的增加、通信失败等而产生控制不稳定、通信不稳定。
另外,能够在通信稳定的范围内维持来自比紧接在前的前车靠前的前车的车辆信息的取得,与前车反复将本车的车辆信息传递到紧随其后的后续车的情况相比,能够抑制行驶控制的延迟蓄积。
因此,即便随着连结台数的增加而队列变长,也能够抑制基于非机械连结的追随行驶中的控制不稳定、通信不稳定。
另外,如图5所示,通信控制部210具备通信链路监视部212A以及取得信息选择部212B,能够基于通信链路的监视结果来实施车辆信息的选择性取得。
通信链路监视部212A对通信链路的建立/断开进行监视,作为前车与本车之间的通信状态,并将监视结果的信息输出到取得信息选择部212B。
取得信息选择部212B基于通信链路的建立/断开动态地切换取得的车辆信息,从而自动选择在通信稳定的范围内取得车辆信息的前车。
图6的流程图表示具备通信链路监视部212A以及取得信息选择部212B的通信控制部210实施的车辆信息的选择处理的顺序。
通信控制部210在步骤S601中随时监视与在当前时刻取得用于追随行驶控制的车辆信息的前车之间的通信链路的状态。
接着,通信控制部210在接下来的步骤S602中,判断与在当前时刻取得车辆信息的前车之间的通信链路是在建立状态下持续还是断开。
在通信链路的建立状态持续的情况下,通信控制部210从步骤S602进入步骤S603,将取得车辆信息的前车维持为现状而继续进行追随行驶控制。
即,如果是在与前车中的一台之间建立了车间通信的通信链路的状态,则不需要切换车辆信息的取得来源,通信控制部210通过在当前时刻建立的通信链路继续取得车辆信息。
另一方面,在与在当前时刻取得车辆信息的前车之间的通信链路断开的情况下,通信控制部210从步骤S602进入步骤S604。
通信控制部210在步骤S604中,确认在与在当前时刻取得车辆信息的前车不同的前车中与距离最近(行驶顺序最近)的车辆之间的通信链路的建立。
接着,当建立与其他前车之间的通信链路时,通信控制部210进入步骤S605,从建立了通信链路的前车取得车辆信息,并基于所取得的车辆信息来实施追随行驶控制。
例如,在第三台车辆(第三车辆)从头车100(第一车辆)取得车辆信息(第一车辆信息)的状态下,若与头车100之间的通信链路断开,则第三台车辆的通信控制部210建立与作为第二台的紧接在前的前车(第二车辆)之间的通信链路,将车辆信息的取得来源切换为紧接在前的前车(第二车辆),基于来自第二台的车辆信息(第二车辆信息)继续进行追随行驶控制。
另外,例如,在第四台车辆(第三车辆)从头车100(第一车辆)取得车辆信息的状态下,若与头车100之间的通信链路断开,则第四台车辆的通信控制部210建立与距离最近(行驶顺序最近)的紧接在前的前车即第三台车辆(第二车辆)之间的通信链路,将车辆信息的取得来源切换为紧接在前的前车。
即,通信控制部210对通信链路的断开/连续进行检测/监视,若与车辆信息的取得来源的前车的通信链路断开,则与通信链路的建立最容易的可能性高的紧接在前的前车建立通信链路并接收车辆信息,切换车辆信息的取得来源。
因此,即便与作为车辆信息的取得来源的前车的通信链路有时断开,也能够切换到距离更近且更容易维持通信链路的前车并取得车辆信息,即便随着连结台数的增加而队列变长,也能够抑制基于非机械连结的追随行驶中的控制不稳定、通信不稳定。
需要说明的是,通信控制部210在检测到通信链路的断开时,能够代替与距离最短的紧接在前的前车建立通信链路,例如建立与间隔距离为设定距离以内的前车中的更前头侧的前车的通信链路,并接收车辆信息,并非将建立通信链路的前车限定于紧接在前的前车(距离最短的前车)。
另外,如图7所示,通信控制部210具备通信延迟测量部213A以及取得信息选择部213B,能够基于通信延迟时间的测量数据来实施车辆信息的选择性取得。
通信延迟测量部213A随时测量来自前车的车辆信息的取得中的通信延迟时间,并将通信延迟时间的测定数据输出到取得信息选择部212B。
取得信息选择部213B基于通信延迟时间的测定数据动态地切换取得的车辆信息,从而自动选择在通信稳定的范围内取得车辆信息的前车。
图8的流程图表示具备通信延迟测量部213A以及取得信息选择部213B的通信控制部210实施的车辆信息的选择处理的顺序。
通信控制部210在步骤S701中随时测量用于取得车辆信息的车间通信中的通信延迟时间。
接着,通信控制部210在接下来的步骤S702中,判断与在当前时刻取得车辆信息的前车之间的车间通信中的通信延迟时间是否为阈值以下。
需要说明的是,通信延迟时间的阈值是通信延迟时间的允许最大时间或上限时间。
在通信延迟时间为阈值以下的情况下,通信控制部210从步骤S702进入步骤S703,将取得车辆信息的前车维持为现状而继续进行追随行驶控制。
即,在通信延迟时间为阈值以下的情况下,能够推定为通信延迟的影响充分小且能够维持控制稳定性,因此,通信控制部210将车辆信息的取得来源维持为现状。
另一方面,在与在当前时刻取得车辆信息的前车之间的通信延迟时间超过阈值的情况下,通信控制部210从步骤S702进入步骤S704。
通信控制部210在步骤S704中,在与在当前时刻取得车辆信息的前车不同的前车中,选择通信延迟时间为阈值以下且最短的前车。
接着,通信控制部210在接下来的步骤S705中,从基于通信延迟时间新选择的前车取得车辆信息,并基于所取得的车辆信息来实施追随控制。
例如,在该车辆是从前头起第四台车辆且在与第二台车辆(前车)之间的通信中取得车辆信息的状态下,当与第二台车辆之间的通信中的延迟时间超过阈值时,若通信延迟时间为阈值以下且最短的前车为第三台,则通信控制部210将车辆信息的取得来源切换为第三台车辆(紧接在前的前车)。
即,通信控制部210对用于取得前车的车辆信息的车辆之间的通信中的通信延迟时间进行检测、监视,当通信延迟时间超过阈值时,将通信延迟时间为阈值以下且最短的前车切换为车辆信息的取得来源,实施追随行驶控制。
因此,即便与作为车辆信息的取得来源的前车之间的通信延迟时间有时过长,也能够切换为通信延迟时间更短的前车并取得车辆信息,即便随着连结台数的增加而队列变长,也能够抑制基于非机械连结的追随行驶中的控制不稳定、通信不稳定。
需要说明的是,通信控制部210在检测到通信延迟时间超过了阈值时,能够代替将通信延迟时间最短的前车作为新的车辆信息的取得来源,例如,在通信延迟时间为阈值以下的前车中,将更前头侧的车辆选择为车辆信息的取得来源,并非将新的车辆信息的取得来源限定于通信延迟时间最短的前车。
如上所述,作为用于取得车辆信息的无线通信的状态,通信控制部210对接收功率、通信链路的建立/断开、通信延迟时间进行检测、监视,若在通信路径中产生某些故障(通信设备的故障、电波故障等)而导致通信状态恶化并产生接收功率的降低、通信链路的断开、通信延迟时间的增加中的任一个,则切换到处于能够更稳定地取得车辆信息的通信状态的前车并取得车辆信息,继续进行追随行驶控制。
图9是表示取得车辆信息的前车的切换的方式的图。
在图9的情况下,从队列的前头起第四台是该车辆,最初,与前车中的第二台车辆进行通信而得到车辆信息。
在此,若在与第二台车辆之间的通信路径中产生故障,并产生接收功率的降低、通信链路的断开、通信延迟时间的增加等,则作为能够避免这些故障的通信对象,选择例如第三台即紧接在前的前车作为车辆信息的取得来源,将车辆信息的取得来源从第二台切换到第三台而继续进行追随行驶控制,并维持队列行驶。
上述通信控制部210基于与前车的通信状态来选择并取得与前车相关的车辆信息,但如图10所示,通信控制部210具备车辆信息比较部214A以及取得信息选择部214B,能够基于前车的车辆信息与本车的车辆信息的比较结果来实施车辆信息的选择性取得。
在此,车辆信息比较部214A例如在前车与本车之间对加减速特性等运动性能、车身尺寸进行比较,并将比较结果输出到取得信息选择部214B。
取得信息选择部214B基于前车的车辆信息与本车的车辆信息的比较结果动态地切换取得的车辆信息,从而自动选择在能够维持稳定的队列行驶的范围内取得车辆信息的前车(追随的车辆)。
例如,通过选择与本车相比车宽较大的前车,能够抑制尽管是前车能够通过的车道(行驶轨道)但后续的本车不能通过的情形。
另外,通过追随加减速特性等运动性能与本车同等或比本车差的前车,能够抑制本车不能追随前车的加减速而导致与前车的车间距离延长或缩短的情形。
图11的流程图表示具备车辆信息比较部214A以及取得信息选择部214B的通信控制部210实施的车辆信息的选择处理的顺序。
通信控制部210在步骤S801中,对从前车取得的车辆信息与本车的车辆信息进行比较。
通信控制部210在步骤S801中进行比较的车辆信息是车辆规格信息即车身尺寸、发动机性能等,通信控制部210对从前车作为车辆信息发送的车辆规格信息与车辆信息处理部260保持的本车的车辆规格信息进行比较。
接着,通信控制部210在步骤S802中判断前车的车辆规格信息是否具有以本车的车辆规格信息为基准而预先确定的作为追随前车的适合性。
接着,在前车的车辆规格信息具有适合性的情况下,通信控制部210进入步骤S803,选择为追随的前车。
另一方面,在前车的车辆规格信息不具有适合性的情况下,通信控制部210进入步骤S804,将该前车设为追随的前车的对象外。
例如,通信控制部210选择车宽(整个宽度)为本车的车宽以上的前车作为追随的前车,另外,选择加减速性能与本车的加减速性能同等或比本车的加减速性能差的前车作为追随的前车。
即,通信控制部210将车宽为本车的车宽以上以及/或者加减速性能为本车的加减速性能以下的前车判断为具有作为追随的前车的适合性,将车宽小于本车的车宽以及/或者加减速性能比本车的加减速性能优异的前车判断为不具有作为追随的前车的适合性。
换言之,在通信控制部210中,基于车宽、加减速性能等车辆规格信息,预先设定追随的前车(接收用于追随控制的车辆信息的前车)。
例如,如果是对车宽进行比较的情况,则通信控制部210将本车的车宽以上的前车预先设定为追随的前车,将车宽小于本车的车宽的前车从追随的前车中排除,另一方面,将本车的车宽以上的前车选定为具有作为追随对象的适合性的前车,从具有作为追随对象的适合性的前车选择性地接收车辆信息。
而且,通信控制部210在开始队列行驶之前确定的行驶顺序中的前车具有适合性的情况下开始队列行驶,在前车缺少适合性的情况下,输出要求重组行驶顺序的信号,或者暂不参加队列行驶。
若追随的前车的车宽为本车以上,则本车也能够通过前车通过的车道,因此,具有作为追随对象的适合性,另外,若加减速性能为本车以下,则能够抑制晚于前车的加速而使得车间距离增大、或者来不及减速而使得车间距离缩短的情形。
需要说明的是,追随的前车的选择所使用的车辆规格信息并不限于车宽、加减速性能,通信控制部210例如能够基于车辆高度(整个高度)、最低离地高度、胎面、最小转弯半径等车辆规格信息,进行追随的前车的选择处理。
通信控制部210在基于车辆的高度的选择处理的情况下,选择车辆高度为本车以上的前车作为追随的前车,在基于最低离地高度的选择处理的情况下,选择最低离地高度为本车以下的前车作为追随的前车,由此,使本车也能够通过前车通过的车道。
另外,在基于胎面、最小转弯半径的选择处理的情况下,取得信息选择部214B选择胎面、最小转弯半径为本车以上的前车作为追随的前车,由此,能够抑制在弯道行驶中与前车相比本车的行驶轨迹向外侧鼓出等而使得队列紊乱。
需要说明的是,能够将取得信息选择部211B-214B设置在通信控制部210的外部。
在上述实施方式中说明的各技术思想只要不产生矛盾,就可以适当组合使用。
另外,参照优选的实施方式具体说明了本发明的内容,但基于本发明的基本技术思想以及教导,只要是本领域技术人员,当然能够采用各种变形方案。
通信控制部210能够将接收功率、通信链路的建立/断开、通信延迟时间中的多个组合为无线通信的状态来进行车辆信息的取得来源的切换。
例如,通信控制部210在产生了通信链路的断开时,能够将能够建立通信链路的前车中的、接收功率最高的前车、通信延迟时间最短的前车作为车辆信息的新的取得来源。
另外,通信控制部210能够对接收功率以及通信延迟时间进行检测、监视,从接收功率为阈值以上且通信延迟时间为阈值以下的前车中选择车辆信息的取得来源。
在此,以下记载能够从上述实施方式掌握的技术思想。
作为车辆控制装置的一个方案,车辆控制装置通过构成队列的车辆之间的无线通信来取得包含与前车的控制操作量以及行驶状态量相关的信息的前车信息,基于所取得的所述前车信息进行基于非机械连结的追随行驶控制,其特征在于,根据所述无线通信的状态来切换所述前车信息的取得来源。
在车辆控制装置的优选方案中,其特征在于,所述无线通信的状态包括接收功率、通信链路的建立/断开、通信延迟时间中的至少一个。
另外,作为车辆控制装置的一个方案,车辆控制装置通过构成队列的车辆之间的无线通信来取得包含与前车的运动相关的信息的前车信息,基于所取得的所述前车信息进行基于非机械连结的追随行驶控制,其特征在于,所述前车信息包含前车的规格信息,基于本车的规格信息与前车的规格信息的比较来选择要追随的前车。
在车辆控制装置的优选方案中,其特征在于,所述规格信息包括与前车的运动性能相关的信息和与前车的车身尺寸相关的信息中的至少一方。
另外,本发明并不限于上述实施方式,包括各种变形例。例如,上述实施方式为了容易理解地说明本发明而详细地进行了说明,但并不限定于必须具备已说明的全部结构。另外,可以将某实施方式的结构的一部分替换为其他实施方式的结构,另外,也可以在某实施方式的结构上增加其他实施方式的结构。另外,关于各实施方式的结构的一部分,能够进行其他结构的追加、删除、替换。
本申请要求2018年11月29日提出的日本专利申请第2018-223105号的优先权。包括2018年11月29日提出的日本专利申请第2018-223105号的说明书、权利要求书、附图以及摘要在内的全部公开内容通过参照而作为整体被引入本申请中。
附图标记说明
100头车、110车辆信息处理部、111驾驶员、112加速踏板、113制动踏板、114方向盘、120通信控制部、130车辆控制装置、200后续车、201车辆控制装置、210通信控制部、220前车识别部、230目标轨道生成部、240车辆运动控制部、250致动器控制部、260车辆信息处理部。
- 车辆追随行驶系统、车辆控制装置、车辆及车辆控制方法
- 车辆控制装置、车辆控制方法以及车辆追随行驶系统