夹具及砌墙机
文献发布时间:2023-06-19 12:00:51
技术领域
本申请涉及一种自动砌墙装置,尤其涉及一种夹具及砌墙机。
背景技术
最坚固的筑墙方式是逐块搭砌。随着招工难,人工成本逐渐提升,逐步衍生出砌墙机械手,其可替代人力完成砌墙工作,只需按时保养,避免了招工难,用人难和工作效率稳定性的问题,同时大大降低了工伤发生的可能性。
但是现有的砌墙桁架设备存在很大缺陷,其升降高度收到桁架限制,砌墙范围有限;砖的夹持部件夹持不够稳固,并且由于夹持部件需要张合需要占据较大空间,对于边角位置处的墙砖无法处理;夹持部件的取放过程都需要从墙砖上部进入,占据大量顶部空间,因而对顶层的墙砖无法垒砌;存在很大局限性。
发明内容
本申请的目的在于提出一种拾取墙砖稳定、无死角位置的夹具及砌墙机。
本申请的技术方案之一是这样实现的:夹具,包括位移驱动、夹持驱动、后平板、第一驱动铰接轴、第二驱动铰接轴、驱动齿条;后平板的顶部通过第一驱动铰接轴安装有后驱动臂,后驱动臂的顶部通过第二驱动铰接轴安装有前驱动臂;可滑动的驱动齿条垂直于第一驱动铰接轴轴向并且水平布置,驱动齿条下侧固定有驱动圆杆,前驱动臂中部固定有套装在驱动圆杆上的转动轴套;第一驱动铰接轴、第二驱动铰接轴、驱动圆杆、转动轴套的轴向均一致;驱动齿条与夹持驱动相连;后平板与能够驱动后平板沿驱动齿条长度方向进行移动的位移驱动相连。
进一步的,后平板的顶部两端分别通过第一驱动铰接轴安装有一个后驱动臂,每个后驱动臂对应有一个第二驱动铰接轴并安装有一个前驱动臂;驱动圆杆的两端分别设有一个转动轴套,每个转动轴套对应的与一个前驱动臂固定相连。
进一步的,前驱动臂内侧设有软质的夹持面。
本申请的技术方案之二是这样实现的:砌墙机,包括x轴轨道、底座、置砖台、立柱、机箱组架、自动稳固器、夹具;底座连接有x轴驱动并通过x轴驱动可滑动的安装在x轴轨道上;置砖台固定在底座一边,立柱固定在底座中部;机箱组架内设有第一z轴驱动并通过第一z轴驱动可滑动的安装在立柱上;机箱组架内还设有y轴驱动并通过y轴驱动连接有可沿y轴运动的后平板支架,夹具安装在后平板支架上并对应位于置砖台上方,夹持驱动安装在机箱组架内;立柱顶部设有可沿z轴运动的自动稳固器。
进一步的,y轴驱动为y向电机;一对后平板支架沿着y向可滑动的安装在机箱组架内,后平板支架上设有y向齿条,机箱组架固定安装有位于一对平板支架上方的驱动轴;y向电机通过第一链条与驱动轴相连,驱动轴上设有第一齿轮并通过第一齿轮与y向齿条啮合在一起。
进一步的,一对后平板支架沿着y向可滑动的安装在机箱组架内,后平板支架上设有y向齿条,机箱组架固定安装有位于一对平板支架上方的驱动轴;y向电机通过第二链条与驱动轴相连,驱动轴上设有第二齿轮并通过第二齿轮与y向齿条啮合在一起。
进一步的,夹具的顶部固定在后平板支架端头。
进一步的,自动稳固器上安装有第二z轴驱动并通过第二z轴驱动可滑动的安装在立柱顶部;自动稳固器顶部设有顶锥。
由于实施上述技术方案,本申请通过后平板与要夹持的墙砖抵触,通过夹持驱动带动驱动齿条移动,后驱动臂沿着第二驱动铰接轴转动,对已被后平板抵触的墙砖形成夹持或松开的目的,;本申请结构简单,对于墙砖固定更可靠,并且由于夹持、卸下过程需要空间小,对于边角位置处的墙砖也能有效处理。
附图说明
本申请的具体结构由以下的附图和实施例给出:
图1是本申请实施例1的侧视结构示意图;
图2是本申请实施例1的后视结构示意图;
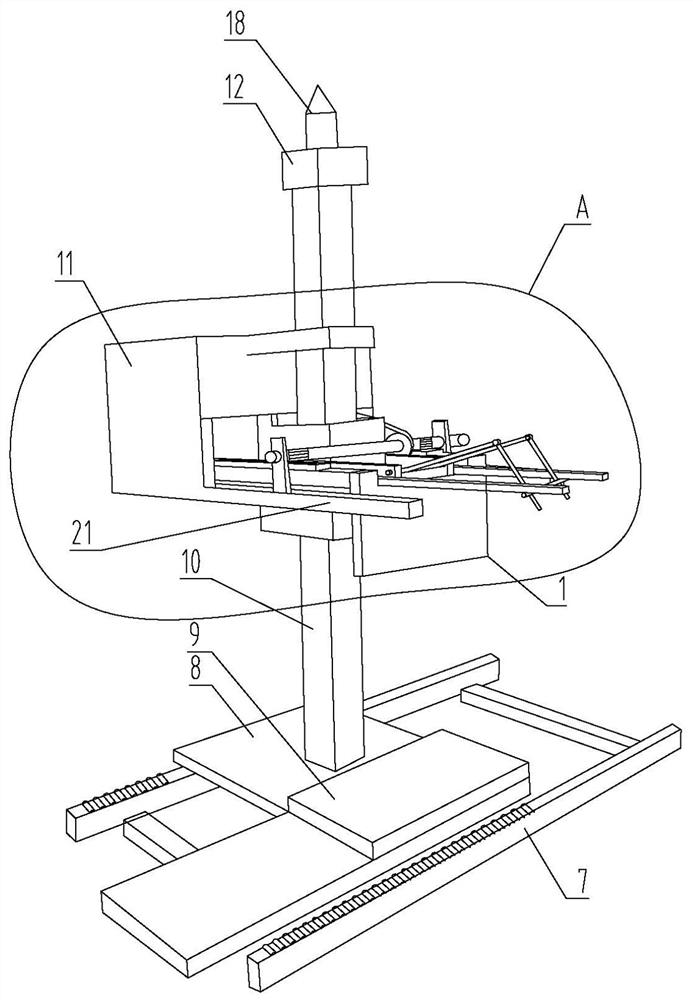
图3是本申请实施例2的立体结构示意图;
图4是图3中A处的局部放大结构示意图。
图例:1.后平板,2.第一驱动铰接轴,3.第二驱动铰接轴,4.驱动齿条,5.后驱动臂,6.驱动齿轮,7.x轴轨道,8.底座,9.置砖台,10.立柱,11.机箱组架,12.自动稳固器,13.夹持面,14.y向齿条,15.驱动轴,16.第一链条,17.第一齿轮,18.顶锥,19.前驱动臂,20.转动轴套,21.后平板支架,22.驱动圆杆。
具体实施方式
本申请不受下述实施例的限制,可根据本申请的技术方案与实际情况来确定具体的实施方式。
实施例1,如图1至2所示,夹具包括位移驱动、夹持驱动、后平板1、第一驱动铰接轴2、第二驱动铰接轴3、驱动齿条4;后平板1的顶部通过第一驱动铰接轴2安装有后驱动臂5,后驱动臂5的顶部通过第二驱动铰接轴3安装有前驱动臂19;可滑动的驱动齿条4垂直于第一驱动铰接轴2轴向并且水平布置,驱动齿条4下侧固定有驱动圆杆22,前驱动臂19中部固定有套装在驱动圆杆22上的转动轴套20;第一驱动铰接轴2、第二驱动铰接轴3、驱动圆杆22、转动轴套20的轴向均一致;驱动齿条4与夹持驱动相连;后平板1与能够驱动后平板1沿驱动齿条4长度方向进行移动的位移驱动相连。
取墙砖时,位移驱动带动后平板1向前移动;当后平板1与待取墙砖抵触后,夹持驱动带动驱动齿条4向后移动,驱动齿条4上的驱动圆杆22同步移动,转动轴套20转动,后驱动臂5绕着第二驱动铰接轴3逆时针转动,直到夹在待取墙砖的另一面,此时可以轻松、牢固的将墙砖提起。当墙砖运至指定目的地后,夹持驱动带动驱动齿条4向前移动,驱动齿条4上的驱动圆杆22同步移动,转动轴套20转动,后驱动臂5绕着第二驱动铰接轴3顺时针转动,松开夹持的墙砖,从而自动退出墙砖。夹持、松开过程,后平板1保持不动,后驱动臂5转动即可,由于前驱动臂19、第一驱动铰接轴2的配合,后驱动臂5的竖直向上运动占据空间很小,对顶层的墙砖可以进行有效的放置。
本申请构造简单,对于墙砖固定更可靠,并且由于夹持、卸下过程需要空间小,对于边角位置处的墙砖也能有效处理,无需像现有夹持机构需要两板块夹持、卸砖时需要竖直上提而占据大量空间,即使对于边角、墙顶等位置的墙砖也能有效搬运;适用性广。
如图1、2所示,后平板1的顶部两端分别通过第一驱动铰接轴2安装有一个后驱动臂5,每个后驱动臂5对应有一个第二驱动铰接轴3并安装有一个前驱动臂19;驱动圆杆22的两端分别设有一个转动轴套20,每个转动轴套20对应的与一个前驱动臂19固定相连。
如图、所示,前驱动臂19内侧设有软质的夹持面13。对墙砖夹持更稳定。
实施例2,如图3、4所示,一种砌墙机,包括x轴轨道7、底座8、置砖台9、立柱10、机箱组架11、自动稳固器12、夹具;底座8连接有x轴驱动并通过x轴驱动可滑动的安装在x轴轨道7上;置砖台9固定在底座8一边,立柱10固定在底座8中部;机箱组架11内设有第一z轴驱动并通过第一z轴驱动可滑动的安装在立柱10上;机箱组架11内还设有y轴驱动并通过y轴驱动连接有可沿y轴运动的后平板支架21,夹具安装在后平板支架21上并对应位于置砖台9上方,夹持驱动安装在机箱组架11内;立柱10顶部设有可沿z轴运动的自动稳固器12。
工作步骤如下:第一步,通过x轴驱动控制底座8、立柱10移动到待砌墙位置处;
第二步,将待砌墙砖放置在置砖台9上,通过y轴驱动(即为位移驱动)控制后平板1前进,后平板1抵触待取墙砖后,通过夹持驱动控制驱动齿条4后退,后驱动臂5转动自动将待取墙砖夹持稳定;
第三步,通过第二z轴驱动控制自动稳固器12上移,顶锥18与楼板或其他固定件相抵;
第四步,通过第一z轴驱动控制机箱组架11整体上升,将拾取的墙砖运送到设定高度;
第五步,通过y轴驱动控制后平板支架21、夹具整体移动,将拾取的墙砖送到目的位置(墙上);
第六步,通过夹持驱动控制驱动齿条4前进,后驱动臂5与前驱动臂19伸展,自动松开墙砖;
第七步,通过y轴驱动控制后平板支架21、夹具整体移动,退回原位;
第八步,通过第一z轴驱动控制机箱组架11整体下降,退回原位;
第九步,通过第二z轴驱动控制自动稳固器12下降,顶锥18与楼板或其他固定件松开;
第十步,通过x轴驱动控制底座8、立柱10移动到下一块待砌墙位置处;
本申请稳固性強,精准度高,循环上述步骤即可。x轴驱动可安装在底座8底部。y轴驱动、第一z轴驱动可安装在机箱组架11内。
如图3、4所示,y轴驱动为y向电机;一对后平板支架21沿着y向可滑动的安装在机箱组架11内,后平板支架21上设有y向齿条14,机箱组架11固定安装有位于一对平板支架上方的驱动轴15;y向电机通过第一链条16与驱动轴15相连,驱动轴15上设有第一齿轮17并通过第一齿轮17与y向齿条14啮合在一起。
驱动齿条4上可安装驱动齿轮6并通过驱动齿轮6与夹持驱动输出端相连。本申请中的x轴驱动、y轴驱动、第一z轴驱动、第二z轴驱动以及各自连接件均为现有公知公用技术,其目的为轨道传送,可为电驱动或液压驱动。在此仅提供y向电机、链条、驱动轴15配合驱动后平板支架21移动的一种方式,其他部件的连接结构可参考本段连接方式,也可参考其他现有公知公用的连接方式,在此不做赘述。
各个电机可通过现有单片机进行控制,实现整机工作步骤。
夹具的顶部固定在后平板支架21端头。
如图3、4所示,自动稳固器12上安装有第二z轴驱动并通过第二z轴驱动可滑动的安装在立柱10顶部;自动稳固器12顶部设有顶锥18。
因为本申请采用立柱10进行升降,其结构简单、造价低、其能满足任意高度的砌墙要求。消除了现有技术中桁架式砌墙高度受限的弊端,但是立柱10式的稳定性不如桁架式,通过立柱10与自动稳固器12的配合能加强设备整体强度,提高搬运墙砖时的稳定性。
在本文中,“上”、“下”、“前”、“后”、“左”、“右”等仅用于表示相关部分之间的相对位置关系,而非限定这些相关部分的绝对位置。
以上技术特征构成了本申请的实施例,其具有较强的适应性和实施效果,可根据实际需要增减非必要技术特征,来满足不同情况的需要。
- 夹具及砌墙机
- 一种自动砌墙机及其砌墙方法