一种爬行检查装置、系统及方法
文献发布时间:2023-06-19 12:05:39
技术领域
本发明涉及设备巡检技术领域,特别是涉及一种爬行检查装置、系统及方法。
背景技术
目前,对管道、集箱、容器等相对密闭的设备进行内部检查通常以爬行车或工作人员目视检查为主,通过观察设备内壁表面及内部工作状况来判断是否存在破损,腐蚀,开裂等异常情况。
对于人工检查的方式,在相对密闭、狭小的设备,人员可能根本无法进去,其次即便可以进去检查,也存在着很大的安全风险,如有限空间窒息、有毒有害气体损害等,对于容积较大的容器,内部还需搭设脚手架进行检验,存在高空坠落的安全风险。人工目视检查从时间及配合工序来说,成本太高,不适宜大常规操作,因此采用爬行车检查是更好的选择方式。
但是,现有的爬行车检查方式存在以下缺点:爬行车只能够在一定的倾斜角度的斜坡上行走,一般只能够在倾角小于60度的斜坡上爬行,在较高的倾角壁面上容易发生倾倒,因此对于垂直的容器壁面、球罐侧面顶部、管道侧面及顶部等区域都是爬行车的检测盲区,无法采用爬行车检查的方式对其进行检测。
发明内容
本发明要解决的技术问题是:爬行车无法在倾角较大的壁面及设备顶部进行爬行检测。
为了解决上述技术问题,本发明提供了一种爬行检查装置,其包括底盘,所述底盘的上表面上设有抽气装置,所述底盘上相对于所述抽气装置设置有通风口,所述抽气装置用于将所述底盘下侧的空气通过所述通风口抽向所述底盘的上侧;所述通风口的外围围设有密封件,所述密封件设于所述底盘的下侧并与所述底盘连接;所述底盘上还设有用于移动所述爬行检查装置的移动件。
进一步的,在所述抽气装置抽气时,所述密封件、所述底盘的下表面及被检测设备的壁面共同形成一腔体,所述抽气装置抽气以至于所述腔体内的气压值小于所述腔体外的气压值。
进一步的,所述抽气装置包括支架、叶轮和用于驱动所述叶轮转动的第一电机,所述叶轮置于所述通风口上侧并与所述支架连接,所述第一电机与所述支架连接,所述支架与所述底盘连接。
进一步的,所述密封件具有弹性,在所述抽气装置不抽气时,所述密封件的下端向上翘起;在所述抽气装置抽气时,所述密封件向下弯曲至被检测设备的壁面上。
进一步的,所述密封件设于所述底盘的边缘上。
进一步的,上述爬行检查装置还包括控制单元及分别与所述控制单元电连接的摄像头、电源和无线通信模块,所述无线通信模块用于与遥控设备通信连接,所述移动件及所述抽气装置分别与所述控制单元电连接。
进一步的,所述移动件包括第一滚轮、第二滚轮、用于驱动所述第一滚轮的第二电机和用于驱动所述第二滚轮的第三电机,所述第二电机和所述第三电机分别与所述控制单元电连接;所述第一滚轮设于所述底盘的左侧,所述第二滚轮设于所述底盘的右侧。
为了解决上述技术问题,本发明提供了一种爬行检查系统,其包括遥控设备和如上述任一项方案所述的爬行检查装置,所述遥控设备与所述爬行检查装置通信连接。
为了解决上述技术问题,本发明提供了一种应用如上述任一项方案所述的爬行检查装置进行爬行检查的方法,该方法包括以下步骤:
根据被检测设备的形状设置检测路径;
所述爬行检查装置在所述检测路径上爬行并对所述被检测设备进行拍摄,若所述爬行检查装置爬行时的倾角达到预设值,则抽气装置进行抽气;
根据所述爬行检查装置拍摄的所述被检测设备的图像判断所述被检测设备在所述图像对应的区域是否异常;
若判断所述被检测设备在所述图像对应的区域异常,则标定该异常区域的位置信息。
进一步的,所述根据被检测设备的形状设置检测路径包括:
根据所述被检测设备的形状设置所述爬行检查装置爬行时的起始角度、移动距离和转向角度。
上述技术方案所提供的一种爬行检查装置、系统及方法,与现有技术相比,其有益效果在于:通过在底盘下侧设置密封件,且密封件围设在通风口的外围,爬行检查装置在倾角较大的斜坡或者设备顶部进行爬行检查时,围设的密封件与爬行检查装置爬行的表面形成一腔体,抽气装置抽气,会使该腔体的气压降低,因气压差使底盘具有向爬行检查装置爬行表面的作用力,从而阻止爬行检查装置发生倾倒。通过控制抽气装置的抽气功率可控制气压差的大小,进而控制将爬行检查装置吸附在爬行表面上的作用力,可以使爬行检查装置在被检测设备倾角较大的壁面或顶部进行爬行检测。
附图说明
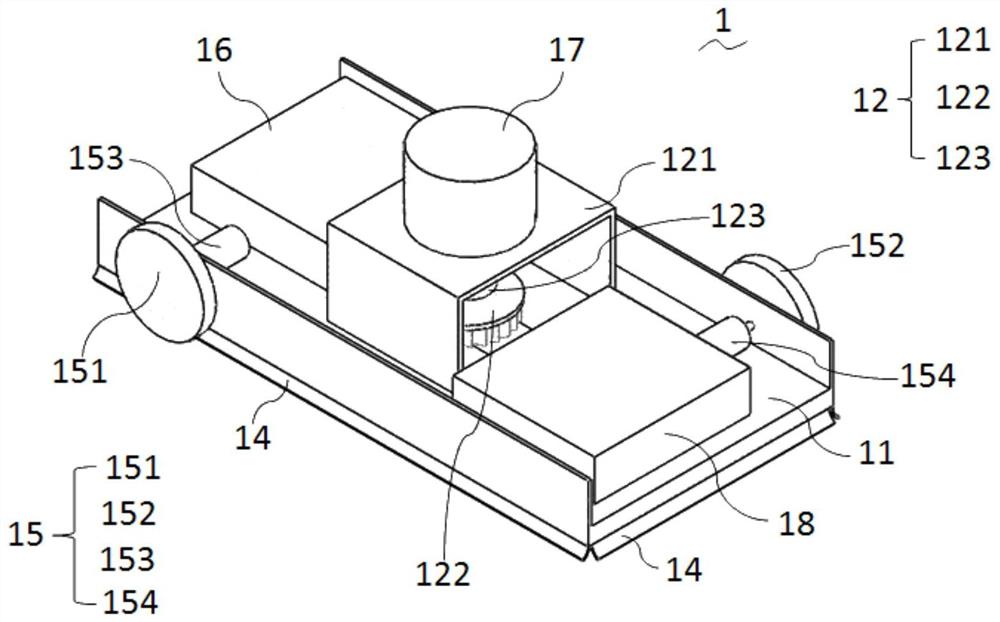
图1是本发明实施例的爬行检查装置的结构示意图;
图2是图1的主视透视图;
图3是图1的仰视透视图;
图4是本发明实施例的控制单元的工作原理图;
图5是本发明一实施例的检测路径的示意图;
图6是本发明另一实施例的检测路径的示意图;
图7是本发明另一实施例的检测路径的示意图。
其中,1-爬行检查装置,11-底盘,12-抽气装置,121-支架,122-叶轮,123-第一电机,13-通风口,14-密封件,15-移动件,151-第一滚轮,152-第二滚轮,153-第二电机,154-第三电机,16-控制单元,17-摄像头,18-电源。
具体实施方式
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
在本发明的描述中,应当理解的是,本发明中采用术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
如图1至图3所示,本发明实施例提供了一种爬行检查装置1,其包括底盘11,底盘11的上表面上设有抽气装置12,底盘11上相对于抽气装置12设置有通风口13,抽气装置12用于将底盘11下侧的空气通过通风口13抽向底盘11的上侧;通风口13的外围围设有密封件14,密封件14设于底盘11的下侧并与底盘11连接;底盘11上还设有用于移动爬行检查装置1的移动件15。
基于上述方案的爬行检查装置1,通过在底盘11下侧设置密封件14,且密封件14围设在通风口13的外围,爬行检查装置1在倾角较大的斜坡或者设备顶部进行爬行检查时,围设的密封件14与爬行检查装置1爬行的表面形成一腔体,抽气装置12抽气,会使该腔体的气压降低,因气压差使底盘11具有向爬行检查装置1爬行表面的作用力,从而阻止爬行检查装置1发生倾倒。通过控制抽气装置12的抽气功率可控制气压差的大小,进而控制将爬行检查装置1吸附在爬行表面上的作用力,可以使爬行检查装置1在被检测设备倾角较大的壁面或顶部进行爬行检测。
具体的,在抽气装置12抽气时,密封件14、底盘11的下表面及被检测设备的壁面共同形成一腔体,抽气装置12抽气以至于该腔体内的气压值小于腔体外的气压值,形成一类似真空状态(实际情况下不是完全的真空状态),爬行检查装置1在大气压作用下被吸附在被检测设备的壁面上,而不会发生倾倒。
其中,如图1至图3所示,抽气装置12包括支架121、叶轮122和用于驱动叶轮122转动的第一电机123,叶轮122置于通风口13上侧并与支架121连接,第一电机123与支架121连接,支架121与底盘11连接。第一电机123带动叶轮122转动,叶轮122转动时将底盘11下侧的空气通过通风口13抽到底盘11的上侧,以此在底盘11下侧形成一低压的类真空环境。
在本实施例中,支架121内可设有位于通风口13正上方的风道,叶轮122置于风道内,设置风道的目的是有利于叶轮122抽动空气。
其中,如图1至图3所示,密封件14具有弹性,在抽气装置12不抽气时,密封件14的下端向上翘起;在抽气装置12抽气时,密封件14在气压作用下向下弯曲至被检测设备的壁面上。密封件14可选用橡胶密封条,当爬行检查装置1在平坦的壁面上爬行不会发生倾倒时,抽气装置12不抽气,此时密封条处于自然状态下的向腔体外部翘起并不与壁面接触的形状,这样不会影响爬行检查装置1;当爬行检查装置1在倾角较大的壁面移动时,抽气装置12抽气,密封件14在气压作用下向下弯曲至被检测设备的壁面上,此时,密封件14、被检测设备的壁面及底盘11的下表面形成一低压的空腔,并产生使爬行检查装置1附着在比检测设备壁面上不会发生倾倒的作用力。
需要说明的是,密封件14、被检测设备的壁面及底盘11的下表面形成低压空腔不需要完全的密闭,可以具有漏气的缝隙存在,但是这不影响空腔的“真空”效果,这主要关系到吸附力的大小问题,爬行检查装置1不需要很紧地吸在壁面上,而是只需要能支撑装置的整体重量就行。实测效果中,这种功率1W左右的第一电机123产生的吸力能吊起不少于250g重量的物体。另外,密封件14的高度需和底盘11下表面的离地高度相适配,行进时,抽气装置12抽气时,密封件14的下端可与设备壁面接触并与设备壁面产生一摩擦力,但是此摩擦力不会阻碍爬行检查装置1爬行移动。
如图1至图3所示,密封件14设于底盘11的边缘上,方便密封件14的安装,并能够尽可能使形成的低压空腔体积大,利于吸附爬行检查装置1。
在本实施例中,如图1至图4所示,爬行检查装置1还包括控制单元16及分别与控制单元16电连接的摄像头17、电源18和无线通信模块,无线通信模块用于与遥控设备通信连接,移动件15及抽气装置12分别与控制单元16电连接。其中,无线通信模块可为蓝牙模块,控制单元16工作原理图如图4所示,遥控设备通过无线通信模块向控制单元16发出指令,由控制单元16接收并实现对各电机、摄像头17的控制来完成拍照/录像、位置信息记录、图片学习和轨迹设置等功能。
具体的,如图1至图4所示,移动件15包括第一滚轮151、第二滚轮152、用于驱动第一滚轮151的第二电机153和用于驱动第二滚轮152的第三电机154,第二电机153和第三电机154分别与控制单元16电连接;第一滚轮151设于底盘11的左侧,第二滚轮152设于所述底盘11的右侧。当检查装置只需要在平面上作检查时,指令第二电机153和第三电机154同向转动,检查装置即可向前或向后驱动,当第二电机153和第三电机154不同向转动时,检查装置将原地转向,实现0半径调头或转向,当检查装置需要沿垂直甚至反重力方向的壁面进行检查时,指令第一电机123动作,使检查装置底盘11下方形成“真空”,在大气压力下,检查装置被紧紧地压在壁面上,同时根据需要驱动滚轮前进,即可实现全方位检查。
需要说明的是,第一滚轮151和第二滚轮152的直径大小是会影响爬行检查装置1吸附在被检测设备壁面的程度,滚轮直径决定了底盘11的离地间隙,底盘11的离地间隙须稍小于密封条的高度,这样既能使爬行检查装置1吸附在壁面上,也同时不影响其行驶。
本发明实施例还提供了一种爬行检查系统,其包括遥控设备和如上述方案爬行检查装置1,遥控设备与爬行检查装置1通信连接。遥控设备可为手机或平板电脑或台式计算机,用于向控制单元16发送控制指令。遥控设备的界面可包括有方向指令(前后左右)、视频显示界面、指令菜单,指令菜单可包括有拍照、录像、位置信息记录、图片学习功能,巡检轨迹设置等。
本发明实施例还提供了一种应用了上述方案中的爬行检查装置1进行爬行检查的方法,该方法包括以下步骤:
S1、根据被检测设备的形状设置检测路径;
其中,被检测设备可以是集箱、埋地管道或球形罐体等,根据不同形状的被检测设备预先设置爬行检查装置1的检测路径,以便对不同被检测设备顺利完成检测。
S2、爬行检查装置1在检测路径上爬行并对被检测设备进行拍摄,若爬行检查装置1爬行时的倾角达到预设值,则抽气装置12进行抽气;
具体的可以在爬行检查装置1上设置倾角传感器,或根据检测路径的倾斜角度来控制是否启动抽气装置12进行抽气。
S3、根据爬行检查装置1拍摄的被检测设备的图像判断被检测设备在图像对应的区域是否异常;
判断是否异常通过设置于控制单元16内的算法程序完成,具体的,可根据检查的需要,对目标检查区域设置正常值与异常值,正常值是通过开始智能检查前,采集多个正常的被检测设备内壁图像由机器学习所得,异常值是指与有别于正常值的状态。
当智能巡检开始后,摄像头17检查范围内是正常值范围时,将继续巡检,当摄像头17检查范围内出现异常值,即异常状态,如内壁破损、腐蚀、存在异物等情况时,爬行检查装置1将停止巡检,并在操控系统上提示工作人员出现异常,由工作人员作出是否继续巡检的命令。
S4、若判断被检测设备在图像对应的区域异常,则标定该异常区域的位置信息。
具体的,当判断被检测设备在图像对应的区域异常时,可按需要由工作人员自主选择是否拍照及记录位置,位置信息由检测路径推导得出。
进一步的,上述步骤S1具体为:根据被检测设备的形状设置爬行检查装置1爬行时的起始角度、移动距离和转向角度。
在一实施例中,如图5所示,示出了爬行检查装置1对集箱进行检测时的检测路径的示意图,根据集箱的检测需要,检测路线程直线型。
在另一实施例中,如图6所示,示出了爬行检查装置1对埋地管道进行检测时的检测路径的示意图,根据埋地管道的检测需要,检测路线程Z型线。其中,爬行检查装置1的起始角度为、各段的移动距离及各转向角度可根据实际情况进行设置。
在另一实施例中,如图7所示,示出了爬行检查装置1对球罐内壁进行检测时的检测路径的示意图,根据球罐的结构形状,检测路线程圆弧型线。其中,爬行检查装置1的起始角度可根据实际情况设置,圆弧半径为球罐内壁的半径,使爬行检查装置1在球罐内壁做类似螺旋线的形式对其进行检查。
综上,本发明实施例提供的一种爬行检查装置、系统及方法,解决了爬行车无法在倾角较大的壁面及设备顶部进行爬行检测的问题;另外,对于底部有液体或其它不利于车辆行走的工作环境,通过抽气装置12抽气能够增加爬行检查装置1对爬行面的附着力,提高了爬行车的稳定性和对环境的适应性,可以用于多种设备的检查。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本发明的保护范围。
- 一种爬行检查装置、系统及方法
- 爬行机、其控制方法、控制装置以及爬行系统