摄像装置
文献发布时间:2023-06-19 12:07:15
技术领域
本发明涉及摄像装置,特别涉及对移动体进行摄像并校正像素偏差的摄像装置的技术。
背景技术
近年来,开发了获取图像并校正所获取的图像的图像处理装置。例如,一些图像处理装置具备线性传感器(linear sensor),并使用该线性传感器获取图像。
此时,图像处理装置通过线性传感器所获取的图像中有时会产生像素偏差或颜色偏差等。因此,例如,提出了根据预定的条件来校正所获取的图像的图像处理装置(参照专利文献1)。
另外,还公开了一种装置,在该装置中,线性传感器载置于移动体,在该移动体移动时,利用线性传感器拍摄被检查物。该装置构成图像处理装置,所述图像处理装置根据由线性传感器拍摄的摄像数据来判断是否存在被检查物的异常部分(参照专利文献2)。
现有技术文献
专利文献
专利文献1:日本特开2009-189012号公报
专利文献2:日本特开2010-223753号公报
发明内容
发明要解决的问题
例如,在通过摄像装置或图像处理装置来获取图像的情况下,一般在某个摄像时刻,同时通过红色(R)、绿色(G)、以及蓝色(B)这3种颜色来拍摄图像。然后,摄像装置或图像处理装置对同时所拍摄的红色(R)、绿色(G)、蓝色(B)的图像的偏差进行校正。
在此,在以往的图像处理装置和摄像装置中,在摄像时的定时不同的情况下,没有对所拍摄的拍摄图像的偏差进行校正。因此,在图像处理装置和摄像装置中,只有在某一摄像时刻同时拍摄了红色(R)、绿色(G)、以及蓝色(B)的情况下,才可以对拍摄图像进行校正,在摄像时的定时不同的情况下,无法对图像的偏差进行校正。
因此,本发明是鉴于这种状况而完成的,其主要目的在于提供一种摄像装置,该摄像装置能够与摄像时的定时无关地计算出所拍摄的像素的偏差,并生成高精细的拍摄图像。
用于解决问题的手段
本发明人为了解决上述目的进行了深入研究,结果成功地计算出所拍摄的像素的偏差并生成了高精细的拍摄图像,从而完成了本发明。
即,本发明提供一种摄像装置,其中,包括:
传感器,获取与移动体的速度相关的速度信息;
触发信号生成部,从所述传感器获取所述速度信息,生成表示拍摄所述移动体的开始时间的触发信号;
摄像部,基于由所述触发信号生成部生成的所述触发信号,通过两个以上的线性传感器的各个线性传感器对所述移动体进行摄像;以及
计算部,计算从由所述触发信号生成部生成的所述触发信号上升的时间到所述两个以上的线性传感器的各个线性传感器开始拍摄所述移动体为止的时间、以及所述两个以上的线性传感器的各个线性传感器沿着所述移动体的移动方向配置的一个或两个以上的所述线性传感器之间的距离的至少任意一个;以及
像素校正部,基于由所述计算部计算出的所述两个以上的线性传感器的各个线性传感器开始拍摄所述移动体为止的时间、以及所述一个线性传感器之间的距离或所述两个以上的线性传感器之间的各个距离进行校正,以使由所述两个以上的线性传感器的各个线性传感器拍摄的所述移动体的摄像像素一致。
发明的效果
根据本发明,能够与摄像时的定时无关地计算出所拍摄的像素的偏差,并生成高精细的拍摄图像。另外,本发明的效果并不限于上述的效果,也可以是本发明中所记载的任一效果。
附图说明
图1是本发明第一实施方式的摄像装置的硬件框图。
图2是本发明第一实施方式的摄像装置的功能框图。
图3是在应用了本发明第一实施方式的处理电路中对像素校正部校正的时间上的像素偏差进行计算的说明图。
图4是在本发明第一实施方式的处理电路中对像素校正部校正的空间上的像素偏差量进行计算的说明图。
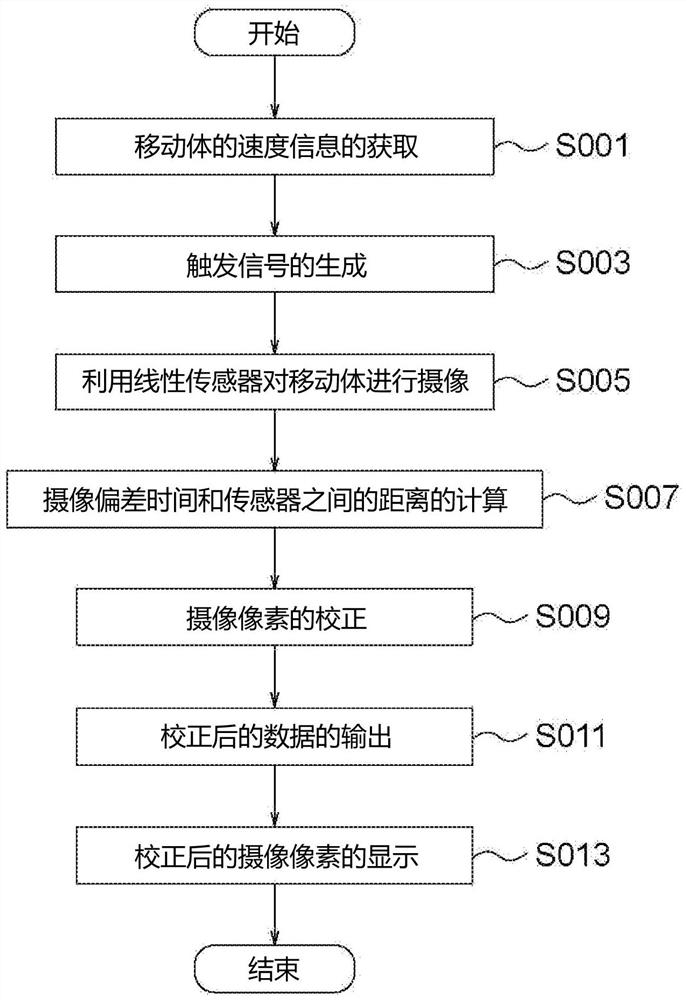
图5是示出本发明第一实施方式的摄像装置的动作的流程图。
图6是示出本发明第一实施方式的摄像装置正在对移动体进行摄像的状态的说明图。
图7是示出本发明第一实施方式的摄像装置的线性传感器对移动体进行摄像后的摄像像素的说明图。
图8是示出本发明第一实施方式的摄像装置的像素校正部进行校正以使所拍摄的移动体的摄像像素一致的示例的说明图。
图9是示出本发明第一实施方式的摄像装置的显示器显示的、对移动体的摄像像素进行校正后的拍摄图像的说明图。
图10是示出本发明第一实施方式的摄像装置的显示器显示的、未对移动体的摄像像素进行校正时的拍摄图像的说明图。
图11是本发明第二实施方式的摄像装置的功能框图。
具体实施方式
以下,参照附图对用于实施本发明的优选方式进行说明。另外,以下说明的实施方式表示本发明的代表性的实施方式的一例,不能由此狭义地解释本发明的范围。
<1.第一实施方式(摄像装置的示例1)>
图1示出了根据本发明的第一实施方式的摄像装置100的硬件框图。图1是根据本发明的第一实施方式的摄像装置100的硬件框图。
[结构]
第一实施方式的摄像装置100具备传感器10、摄像部20、处理电路30、存储电路40、输入电路50、显示器60、图像存储电路70、以及内部总线80。
传感器10具有获取与移动体的速度相关的速度信息的功能。在此,移动体是指例如载置在设置于生产工厂或组装工厂的带式输送机上的物体。这样的物体通过由带式输送机输送,能够视为移动体。传感器10例如可以由旋转编码器构成。在由旋转编码器构成传感器10的情况下,传感器10获取与移动体被输送的速度相关的信息作为速度信息。另外,传感器10只要能够获取速度信息即可,例如,也可以通过利用了多普勒效应的测速枪来获取速度信息。另外,在图1中,传感器10设置在摄像装置100的内部,但这是第一实施方式的一例,例如,也可以设置在摄像装置100的外部。
摄像部20是拍摄移动体的摄像部。摄像部20是固态摄像器件,其通过进行光电转换来一维地读取图像信息,将其转换为模拟信号并按时间序列输出。摄像部20能够由两个以上的线性传感器构成,例如,由CCD(电荷耦合器件、Charge Coupled Device)线性传感器或CMOS(互补金属氧化物半导体、Complementary Metal Oxide Semiconductor)线性传感器构成。另外,在两个以上的线性传感器中,也包括具有相同的滤色器的多个线性传感器,也可以设置多个相同的滤色器。另外,摄像部20可以由三线性传感器(tri-linear sensor)构成。
三线性传感器是指,线性传感器排列成3列,在该线性传感器的每一列中,具备红色(R)、绿色(G)、以及蓝色(G)中的任一个滤色器的传感器。这里,将具有红色(R)的滤色器的线性传感器称为线性传感器R,将具有绿色(G)的滤色器的线性传感器称为线性传感器G,将具有蓝色(G)的滤色器的线性传感器称为线性传感器B。摄像部20可以将线性传感器排列成多列,例如,两列、三列、或四列,列的数量不受限制。另外,优选的是,摄像部20具有线性传感器R、线性传感器G、以及线性传感器B这三种颜色。
摄像部20不限于三线性传感器,例如,也可以应用线性传感器和棱镜。在这种情况下,可以应用棱镜来代替滤色器,摄像部20利用棱镜将入射光分解为三种颜色,利用两个以上的线性传感器检测分别被分解的光。此外,摄像部20还具备用于对移动体进行摄像的透镜。
处理电路30是通过从存储器(存储电路40)读取程序并执行该程序来实现与程序对应的功能的处理器。具体而言,处理电路30(处理器)通过执行所读取的程序来实现触发信号生成部31、计算部32、以及像素校正部33的功能。
图2更详细地示出了通过处理电路30执行程序而实现的各功能。图2是根据本发明第一实施方式的摄像装置100的功能框图。
如图2所示,处理电路30具备触发信号生成部31、计算部32、以及像素校正部33。
触发信号生成部31从传感器10获取速度信息,生成表示拍摄移动体的开始时间的触发信号。
计算部32计算从由触发信号生成部31生成的触发信号上升的时间到两个以上的线性传感器(线性传感器R、线性传感器G、以及线性传感器B)的各个线性传感器开始拍摄移动体为止的时间、以及两个以上的线性传感器(线性传感器R、线性传感器G、以及线性传感器B)的各个线性传感器沿着移动体的移动方向配置的一个或两个以上的线性传感器之间的距离的至少任意一个。
像素校正部33基于由计算部32计算出的两个以上的线性传感器(线性传感器R、线性传感器G、以及线性传感器B)的各个线性传感器到开始拍摄移动体为止的时间、以及一个线性传感器之间的距离或两个以上的线性传感器之间的各个距离进行校正,以使由两个以上的线性传感器(线性传感器R、线性传感器G、以及线性传感器B)的各个线性传感器所拍摄的移动体的摄像像素一致。在这种情况下,例如,像素校正部33基于线性传感器R和线性传感器G之间的距离、线性传感器G和线性传感器B之间的距离进行校正,以使由线性传感器R、线性传感器G、以及线性传感器B分别拍摄的移动体的摄像像素一致。
这里,对像素校正部33进行的校正进行详细说明。图3示出了像素校正部33校正的时间上的像素的偏差。图3是示出第一实施方式的处理电路30的像素校正部33校正的时间上的像素的偏差的说明图。另外,图4示出了像素校正部33校正的空间上的像素的偏差。图4是示出第一实施方式的处理电路30的像素校正部33校正的空间上的像素的偏差的说明图。
在图3中,示出了由触发信号生成部31生成的触发信号,和表示设置在传感器10的线性传感器R、线性传感器G、以及线性传感器B(参照图4)曝光的曝光期间的定时信号。
触发信号TRG由触发信号生成部31生成。定时信号ENR表示线性传感器R的曝光时间。定时信号ENG表示线性传感器G的曝光时间。定时信号ENB表示线性传感器B的曝光时间。定时信号ENR、定时信号ENB、定时信号ENG都在“H”的期间进行曝光,并且,在“H”的上升沿开始曝光。
关于定时信号ENR、定时信号ENG、以及定时信号ENB,由触发信号生成部31生成的触发信号TRG被输入到摄像部20,曝光开始时间相对于该触发信号TRG有所偏差。例如,定时信号ENR相对于触发信号TRG延迟了3E[s]。另外,定时信号ENG相对于定时信号ENR延迟了E[s]。另外,定时信号ENB相对于定时信号ENB延迟了E[s]。
这里,将触发信号的一个周期设为线性传感器R、线性传感器G、以及线性传感器B上的摄像像素移动一个像素量的周期。另外,将线性传感器R、线性传感器G、以及线性传感器B上的图像的移动速度设为v[m/s],将传感器的一个像素的尺寸设为S[m],将线性传感器R和线性传感器G之间、线性传感器G和线性传感器R之间的间隔设为S[m]。
首先,若以线性传感器G的曝光开始时间为基准,则线性传感器R的时间上的偏差为-Ev/S[像素]。
另外,若以线性传感器G的曝光开始时间为基准,则线性传感器B的时间上的偏差为Ev/S[像素]。
接下来,图4示出了设置在传感器10的线性传感器R、线性传感器G、以及线性传感器B。方向S表示移动体移动的移动方向。另外,线性传感器R和线性传感器G的中心之间的距离、线性传感器G和线性传感器R的中心之间的距离分别为2[像素]。
由此,若考虑图3所示的时间上的像素偏差和图4所示的空间上的像素偏差,则由线性传感器R所拍摄的摄像像素相对于由线性传感器G所拍摄的摄像像素的偏差为(-Ev/s-2)[像素]。
另外,由线性传感器B拍摄的摄像像素相对于由线性传感器G拍摄的摄像像素的偏差为(Ev/s+2)[像素]。
由此,处理电路30的像素校正部33将由线性传感器R拍摄的摄像像素错开(-Ev/s-2)像素量,合成到由传感器G拍摄的摄像像素。同样地,处理电路30的像素校正部33将由线性传感器B拍摄的摄像像素错开(Ev/s+2)像素量,合成到由传感器G拍摄的摄像像素。
这样,处理电路30的像素校正部33通过对由线性传感器R、线性传感器G、以及线性传感器B拍摄的摄像像素中的由线性传感器R和线性传感器B拍摄的摄像像素进行校正,从而校正为移动体的摄像像素一致。
另外,构成处理电路30的“处理器”是指,例如,专用或通用的CPU(中央处理器,Central Processing Unit)、或用于特定用途的集成电路(专用集成电路,ApplicationSpecific Integrated Circuit:ASIC)、可编程逻辑器件(例如,简单可编程逻辑器件(Simple Programmable Logic Device:SPLD),复杂可编程逻辑器件(ComplexProgrammable Logic Device:CPLD),以及现场可编程逻辑门阵列(FieldProgrammableGateArray:FPGA)等电路。
处理器通过读取并执行保存在存储器中或直接嵌入到处理器的电路内的程序来实现各功能。在设置有多个处理器的情况下,存储程序的存储器可以针对每个处理器单独设置,或者图1的存储电路40也可以存储与各处理器的功能对应的程序。
输入电路50是用于输入来自操作者能够操作的操作按钮、键盘、指示器件(鼠标等)等输入器件的信号的电路,在此,输入器件本身也包含在输入电路50中。在这种情况下,根据操作的输入信号从输入电路50发送到处理电路30。
显示器60是具有显示由摄像部20拍摄的拍摄图像的功能的显示装置。显示器60包括未图示的图像合成电路、VRAM(视频随机访问存储器,Video RandomAccess Memory)以及画面等。图像合成电路对由处理电路30的像素校正部33校正的图像进行合成。显示器60例如由液晶显示器构成。
存储电路30由包括ROM(只读存储器,Read Only Memory)、RAM(随机存取存储器,RandomAccess Memory)以及HDD(硬盘驱动器,Hard Disk Drive)等的存储装置构成。存储电路30用于存储IPL(初始程序调入,Initial Program Loading)、BIOS(基本输入/输出系统,Basic Input/Output System)以及数据,或者用作处理电路30的工作存储器,或者用于临时存储数据。HDD是存储安装在摄像装置100中的程序(除了应用程序之外,还包括OS(操作系统,Operating System)等)或数据的存储装置。另外,还可以向OS提供GUI(图形用户接口,Graphical User Interface),该GUI在针对操作者的显示器60的显示信息中大多使用图形,并且,能够通过输入电路50进行基础操作。
图像存储电路70例如存储由处理电路30的像素校正部33校正的摄像像素。图像存储电路70例如由包括RAM、HDD等的存储电路构成。
内部总线80与各构成要素连接,以使得通过处理电路30统一控制摄像装置100。内部总线260例如由用于在摄像装置100内传送数据、信号的电路构成。
[动作]
接着,使用图5所示的流程图,对第一实施方式的摄像装置100的动作进行详细说明。
首先,当接通电源时,摄像装置100启动。当摄像装置100起动时,摄像装置100的传感器10获取与移动体的速度相关的速度信息(步骤S001)。传感器10由旋转编码器构成,获取与移动体被带式输送机输送的速度相关的信息。
图6示出了根据本发明的第一实施方式的摄像装置获取与移动体的速度相关的速度信息的状态。图6是示出根据本发明的第一实施方式的摄像装置获取与移动体的速度相关的速度信息的状态的说明图。
如图6所示,摄像装置100的传感器10设置在带式输送机BC的旋转轴上,获取带式输送机BC的旋转速度。
接着,摄像装置100的处理电路30的触发信号生成部31从传感器10获取旋转速度,生成表示拍摄移动体Q的开始时间的触发信号(步骤S003)。
在此,将摄像部20的线性传感器R、线性传感器G、以及线性传感器B的一个像素的尺寸设为S[m],将摄像部20的线性传感器R、线性传感器G、以及线性传感器B上的图像和摄像对象IT的倍率设为N,将移动体Q的移动速度设为V[m/s],将传感器10的旋转编码器一周期间拍摄对象的移动距离设为R[m/round],将传感器10的旋转编码器一周产生的脉冲数设为P[pulse/revolution]。
在这种情况下,摄像部20的线性传感器R、线性传感器G、以及线性传感器B上的图像的移动速度由下式(1)表示。
图像的移动速度v=V/N[m/s]···(1)
由于移动体Q前进1秒期间的旋转编码器的转速由V/R[round]表示,因此,移动体Q前进1秒期间的旋转编码器的输出脉冲数由下式(2)表示。
输出脉冲数=P×V/R[pulse]···(2)
并且,旋转编码器的每一个输出脉冲而前进的摄像部20的线性传感器R、线性传感器G、以及线性传感器B上的图像的移动量由下式(3)表示。
线性传感器上的图像的移动量=((式1)/(式2))
=(V/N)/(P×V/R)=R/NP[m]···(3)
根据式(3),如果移动体Q的移动量与摄像部20的线性传感器R、线性传感器G、以及线性传感器B的一个像素的尺寸相同,则所得到的图像成为纵横比为1的图像。
换言之,在将线性传感器R、线性传感器G、以及线性传感器B上的图像和摄像对象IT的倍率N设为1的情况下,触发信号的周期成为在摄像部20的线性传感器R、线性传感器G、以及线性传感器B上图像移动1个像素的量。
接着,摄像部20基于由触发信号生成部31生成的触发信号,利用线性传感器R、线性传感器G、以及线性传感器B的各个线性传感器对移动体Q进行摄像(步骤S005)。
图7示出了根据本发明第一实施方式的摄像装置100的线性传感器R、线性传感器G、以及线性传感器B基于触发信号TRG对移动体Q进行摄像时的摄像像素。图7是示出根据本发明第一实施方式的摄像装置100的线性传感器R、线性传感器G、以及线性传感器B对移动体Q进行摄像时的摄像像素的说明图。
摄像装置100的摄像部20的线性传感器R、线性传感器G、以及线性传感器B为了拍摄移动体Q移动的状态(参照图4或图6),例如,如图7所示,由摄像部20的线性传感器R、线性传感器G、以及线性传感器B拍摄的摄像像素与触发信号TRG同步地逐个偏差一个脉冲。在此,在将移动体Q的开头图像设为数字1,拍摄从开头向后方各相加1后的数字的图像的情况下,在线性传感器R、线性传感器G、以及线性传感器B之间,每当通过触发信号TRG进行拍摄时,拍摄偏差了约1个脉冲的图像。
接下来,处理电路30的计算部32计算从由触发信号产生部31生成的触发信号TRG的上升时间到三个线性传感器(线性传感器R、线性传感器G、以及线性传感器B)的各个线性传感器R、线性传感器G、以及线性传感器B开始拍摄移动体Q为止的时间,以及两个以上的线性传感器(线性传感器R、线性传感器G、以及线性传感器B)的各个线性传感器沿着移动体Q的移动方向S配置的一个或者两个以上的线性传感器(线性传感器R、线性传感器G、以及线性传感器B)之间的距离的至少任意一个(步骤S007)。
处理电路30的像素校正部33基于由计算部32计算的两个以上的线性传感器(线性传感器R、线性传感器G、以及线性传感器B)的各个线性传感器R、线性传感器G、以及线性传感器B开始拍摄移动体Q为止的时间,以及一个线性传感器之间的距离或两个以上的线性传感器之间的各个距离进行校正,使得由两个以上的线性传感器(线性传感器R、线性传感器G、以及线性传感器B)的各个线性传感器R、线性传感器G、以及线性传感器B所拍摄的移动体Q的摄像像素一致(步骤S009))。
图8示出了根据本发明第一实施方式的摄像装置100的像素校正部33进行校正以使由线性传感器R、线性传感器G、以及线性传感器B拍摄的移动体Q的摄像像素一致的例子。图8是示出根据本发明的第一实施方式的摄像装置100的像素校正部33进行校正以使由线性传感器R、线性传感器G、以及线性传感器B拍摄的移动体Q的摄像像素一致的一例的说明图。只要没有特别说明,“右”是指图8中的右方向,“下”是指图8中的下方向。
像素校正部33例如对图7所示的摄像像素进行校正,以使由线性传感器R所拍摄的摄像像素、由线性传感器B所拍摄的摄像像素与由线性传感器G所拍摄的摄像像素一致。
例如,在图8中的(A)中,像素校正部33对由线性传感器R所拍摄的摄像像素,延迟1个脉冲量的输出。具体而言,如图8中的(B)所示,使由线性传感器R拍摄的摄像像素向右方向延迟1个脉冲量的输出。
另外,在图8中的(A)中,像素校正部33对由线性传感器B所拍摄的摄像像素,提前1个脉冲量的输出。具体而言,如图8中的(B)所示,将由线性传感器B拍摄的摄像像素向左方向提前1个脉冲量的输出。
这样,像素校正部33进行校正,以使线性传感器R、线性传感器G、以及线性传感器B之间的摄像像素的偏差一致。
然后,像素校正部33输出校正后的数据(步骤S011)。像素校正部33将校正后的数据例如显示于显示器60,或者作为用于向外部传送的文件输出。另外,作为输出的目的地,也可以输出到显示器60,但不限于显示器60,例如,也可以是图像存储电路70或存储电路40。另外,也可以是与未图示的外部连接的显示器或存储装置,进而,也可以向打印机输出校正后的数据。
在此,摄像装置100具备显示器60,因此,显示由像素校正部33校正后的摄像像素(步骤S013)。
图9示出了根据本发明的第一实施方式的摄像装置100的显示器60显示的、对移动体Q的摄像像素进行校正后的拍摄图像。图9是示出根据本发明的第一实施方式的摄像装置100的显示器60显示的、对移动体Q的摄像像素进行校正后的拍摄图像的说明图。
如图9所示,放大图X是将图9中的圆圈部分放大的局部放大图。在图9的放大图X中,显示了使数字的正面和背面反转的图。
在图9的局部放大图X中,像素校正部33进行校正,使得例如对由线性传感器R所拍摄的摄像像素,延迟1个脉冲量的输出,并且,对由线性传感器B所拍摄的摄像像素,提前1个脉冲量的输出。由此,如图9的局部放大图X所示,摄像装置100的显示器60能够显示没有像素偏差的高精细的拍摄图像。
与此相对,针对由摄像装置100的像素校正部33拍摄的摄像像素,对未进行校正的拍摄图像进行说明。
图10示出了根据本发明涉及的第一实施方式的摄像装置100的显示器60显示的、未对移动体Q的摄像像素进行校正时的拍摄图像。图10是示出根据本发明的第一实施方式的摄像装置100的显示器60显示的、未对移动体Q的摄像像素进行校正时的拍摄图像的说明图。
如图10所示,放大图Y是将图10中的圆圈部分放大的局部放大图。在图10的放大图Y中,与图9的放大图X同样地,显示了将数字的正面和背面反转的图。在图10的局部放大图Y中,由于像素校正部33未对摄像像素执行校正,所以由线性传感器R、线性传感器G、以及线性传感器B拍摄的摄像像素中产生了像素偏差。
这样,根据本发明的第一实施方式的摄像装置100具备计算像素偏差的计算部32和校正摄像像素的像素校正部33,因此,对于由线性传感器R、线性传感器G、以及线性传感器B拍摄的摄像像素,能够进行校正,能够显示没有像素偏差的高精细的拍摄图像。
如上所述,根据本发明第一实施方式的摄像装置100具备传感器10、摄像部20、触发信号生成部31、计算部32、以及像素校正部33。传感器10获取移动体Q的速度信息。触发信号生成部31生成表示拍摄移动体Q的开始时间的触发信号。摄像部20通过线性传感器R、线性传感器G、以及线性传感器B进行摄像。
计算部32计算从触发信号上升的时间到线性传感器R、线性传感器G、以及线性传感器B开始拍摄移动体Q为止的时间,以及两个以上的线性传感器(线性传感器R、线性传感器G、以及线性传感器B)的各个线性传感器沿着移动体Q的移动方向S配置的一个或者两个以上的线性传感器之间的距离的至少任意一个。像素修正部33基于线性传感器R、线性传感器G、以及线性传感器B开始拍摄移动体Q为止的时间,或者一个线性传感器之间的距离或者两个以上的线性传感器之间的各个距离进行校正,以使由线性传感器R、线性传感器G、以及线性传感器B拍摄的移动体Q的摄像像素一致。
由此,第一实施方式的摄像装置100能够与摄像时的定时无关地计算出所拍摄的像素的偏差并生成高精细的拍摄图像。
<2.第二实施方式(摄像装置的示例2)>
根据本发明的第二实施方式的摄像装置是如下摄像装置:相对于第一实施方式的摄像装置,触发信号生成部基于速度信息的变化,生成触发信号。第二实施方式的摄像装置中,触发信号生成部在从传感器获取的速度信息比第一阈值高速的情况下,对开始拍摄移动体的开始时间进行分频而生成触发信号,并且,在从传感器获取的速度信息比第二阈值低速的情况下,对开始拍摄移动体的开始时间进行倍频而生成触发信号。
根据本发明的第二实施方式的摄像装置,触发信号生成部31能够基于速度信息的变化来生成触发信号TRG,所以例如能够根据由带式输送机BC输送的移动体Q的速度来变更摄像开始时间。由此,第二实施方式的摄像装置能够与摄像时的定时无关地在适合于摄像的摄像定时对移动体Q进行摄像。
在此,参照图6所示的说明图,对第二实施方式的摄像装置进行说明。
例如,假定通过带式输送机BC输送移动体Q的速度根据工厂的运转状况而变动。在这种情况下,由旋转编码器构成的传感器10获取移动体Q的速度信息的变化。
摄像装置100的触发信号生成部31基于旋转编码器的速度信息的变化,生成触发信号TRG,因此,例如,在带式输送机BC的旋转速度变快的情况下,由于输送移动体Q的速度也变快,因此,缩短触发信号的周期。另一方面,在带式输送机BC的旋转速度变慢的情况下,移动体Q被输送的速度也变慢,因此,延长触发信号的周期。
另外,即使在带式输送机BC的旋转方向朝方向S的反方向旋转的情况下,传感器10也能够获取方向S的反方向的速度信息,触发信号生成部31能够基于方向S的反方向的速度信息的变化,生成触发信号TRG。
特别是,根据本发明的第二实施方式的摄像装置100在从传感器10获取的速度信息比第一阈值高速的情况下,触发信号生成部31对开始拍摄移动体Q的开始时间进行分频而生成触发信号TRG。另外,在从传感器10获取的速度信息比第二阈值低速的情况下,触发信号生成部31对开始拍摄移动体Q的开始时间进行倍频而生成触发信号TRG。
例如,将摄像装置100的当前的带式输送机的旋转速度设为3000[r/min],将第一阈值设为5000[r/min]。在移动体Q的转速高于5000[r/min]的情况下,对触发信号TRG进行分频,使转速降低到2500[r/min]而生成触发信号。另外,例如,在将第二阈值设为2000[r/min],移动体Q的旋转速度比2000[r/min]低的情况下,对触发信号TRG进行倍频,生成将旋转速度加快到4000[r/min]的触发信号。
如上所述,根据本发明第二实施方式的摄像装置100,可以根据由带式传送器BC输送的移动体Q的速度来变更触发信号的周期,因而可以生成高精细的拍摄图像。
<3.第三实施方式(摄像装置的示例3)>
根据本发明的第三实施方式的摄像装置是如下摄像装置:相对于第一实施方式的摄像装置,像素校正部将由计算部计算出的两个以上的线性传感器的各个线性传感器开始拍摄移动体为止的时间换算成移动体的摄像像素的距离,对移动体的摄像像素的位置进行校正,以使移动体的摄像像素一致。
例如,如在图3中说明的那样,根据本发明的第三实施方式的摄像装置将由计算部32计算出的线性传感器R、线性传感器G、以及线性传感器B开始拍摄移动体为止的时间换算成移动体的摄像像素的距离。并且,第三实施方式的摄像装置对移动体的摄像像素的位置进行校正,以使移动体的摄像像素一致。另外,第三实施方式的摄像装置不限于此。
例如,如在图4中说明的那样,在根据本发明的第三实施方式的摄像装置中,相对于第一实施方式的摄像装置100,像素校正部33将由计算部32计算出的一个线性传感器之间的距离或两个以上的线性传感器之间的各个距离换算成移动体的摄像像素的距离。并且,第三实施方式的摄像装置对移动体的摄像像素的位置进行校正,以使移动体的摄像像素一致。
另外,例如,根据本发明的第三实施方式的摄像装置也可以是如下摄像装置:将在图3中说明的内容和在图4中说明的内容进行组合,像素校正部33将由计算部32计算出的线性传感器R、线性传感器G、以及线性传感器B的各个线性传感器开始拍摄移动体为止的时间,以及一个线性传感器之间的距离或者两个以上的线性传感器之间的各个距离换算为一个以上的移动体的摄像像素的距离,对移动体的摄像像素的位置进行校正,以使移动体的摄像像素一致。
第三实施方式的摄像装置是与图1和图2所示的第一实施方式相同的结构,像素校正部33能够利用时间、速度、距离的关系,通过上述三个方式对移动体Q的摄像像素的位置进行校正。
根据本发明的第三实施方式的摄像装置,像素校正部33能够换算为移动体的摄像像素的距离,并对移动体的摄像像素的位置进行校正,因此,能够生成高精细的拍摄图像。
<4.第四实施方式(摄像装置的示例4)>
根据本发明的第四实施方式的摄像装置是如下摄像装置:相对于第一实施方式的摄像装置,基于由计算部计算出的两个以上的线性传感器的各个线性传感器开始拍摄移动体为止的时间、以及一个线性传感器之间的距离或两个以上的线性传感器之间的各个距离,对线性传感器开始拍摄的时间进行校正,以使由两个以上的线性传感器的各个线性传感器所拍摄的移动体的摄像像素一致。
根据本发明的第四实施方式的摄像装置,像素校正部对线性传感器开始拍摄的时间进行校正,以使由两个以上的线性传感器的各个线性传感器所拍摄的移动体的摄像像素一致,因此,能够生成高精细的拍摄图像。
图11示出了根据本发明的第四实施方式的摄像装置的功能框图。图11是根据本发明的第四实施方式的摄像装置的功能框图。另外,对于与第一实施方式相同的结构标注了相同的附图标记,并适当省略说明。
第四实施方式的摄像装置101与第一实施方式的摄像装置100的不同点在于,像素校正部33对线性传感器R、线性传感器G、以及线性传感器B开始摄像的时间进行校正。
例如,若使用图3进行说明,则第四实施方式的摄像装置101的像素校正部33对线性传感器R、线性传感器G、以及线性传感器B开始摄像的时间进行校正。
在图3中,关于定时信号ENR、定时信号ENG、定时信号ENB,由触发信号生成部31生成的触发信号TRG被输入到摄像部20,曝光开始时间相对于该触发信号TRG有所偏差。例如,定时信号ENR相对于触发信号TRG延迟了3E[s]。另外,定时信号ENG从定时信号ENR延迟了E[s]。另外,定时信号ENB从定时信号ENB延迟了E[s]。
第四实施方式的摄像装置101的像素校正部33对定时信号ENR、定时信号ENG、定时信号ENB的摄像定时的偏差进行校正。这里,例如,使用像素代替时间来校正摄像定时。具体而言,像素校正部33以定时信号ENG为基准,将定时信号ENR延迟一个像素的量来开始摄像,并且,将定时信号ENB提前一个像素的量来进行摄像。
另外,使摄像定时偏差的值例如能够提前或延迟两个像素量的摄像开始时间。另外,在这种情况下,摄像开始时间并不限定于一个像素单位,例如,能够延迟摄像开始时间以使延迟0.2个像素量,或者提前摄像开始时间以使提前0.3个像素量,精细地进行刻画。
根据本发明的第四实施方式的摄像装置101,摄像时间校正部34能够对构成摄像部10的线性传感器R、线性传感器G、以及线性传感器B的各个线性传感器开始摄像的时间进行校正,以使移动体的摄像像素一致,因此,能够生成高精细的拍摄图像。
另外,根据本发明的第一至第四实施方式并不限定于上述的实施方式,在不脱离本发明的主旨的范围内能够进行各种变更。例如,第一至第四实施方式能够分别组合实施。具体而言,能够将第四实施方式应用于第一实施方式,另外,也能够将第四实施方式应用于第三实施方式。另外,也能够将第二实施方式叠加应用于第一实施方式、第三实施方式、以及第四实施方式。
另外,本说明书中记载的效果只不过是例示,并不限定于此,另外,也可以具有其他效果。
例如,在第一至第四实施方式中,摄像装置(摄像装置100、摄像装置101)构成为具备显示器60以及图像存储电路70,但本实施方式不限于此。例如,摄像装置(摄像装置100、摄像装置101)也可以不具有显示器60以及图像存储电路70,而是经由有线或无线的网络而具备单独的显示器或外部的图像存储电路。在这种情况下,摄像装置能够将应该存储于图像存储电路70的拍摄图像存储于外部的图像存储电路,或者将该拍摄图像显示于单独的显示器。
附图标记说明
10 传感器
20 摄像部
30 处理电路
31 触发信号生成部
32 计算部
33 像素校正部
40 存储电路
50 输入电路
60 显示器
70 像素存储电路
100、101 摄像装置
- 摄像装置的控制装置、摄像装置、摄像装置的控制方法及摄像装置的控制程序
- 摄像装置、包含摄像装置的内窥镜装置、包含摄像装置的移动体、摄像单元和影像处理单元