一种智能采集水样装置
文献发布时间:2023-06-19 12:13:22
技术领域
本发明涉及水样采集装置技术领域,特别是涉及一种智能采集水样装置。
背景技术
目前我国水资源污染情况严重,水污染防治工作迫在眉睫,而高效全面的获取水质信息是水污染防治工作的先决条件,水质采样工作则是获取水质信息的关键环节,目前水质采样通常采用人工采样和自动采样的方式,它们都具有各自的局限性,主要表现在:对于定深采样,难度较大,在采水器下放过程中为了确定采水器是否下放至设定的采水深度,一般通过牵拉采水器的绳缆上的标识来确认,而采水器在水体中的实际深度受到水的流速的影响往往存在较大误差。(2)在采样过程中,如何将采水装置在到达指定深度后自动开启采样并保留预设深度的水样是目前急需解决的关键问题。(3)对于污染严重或突发化学品泄露的水域,环境恶劣,存在有毒有害物质或气体,人工采集具有极大的危险性,传统方式很难采集。(4)无人机采集存在无人机承重有限,负重飞行时间有限,不能长时间、大范围的进行多次定深采样。
发明内容
1.要解决的技术问题
本发明的目的是:在于提供一种智能采集水样装置,它可以实现定深采集,减少因水的流速对深度造成的误差,同时可以实现取指定深度的水样,水样采集完毕,关闭阀门,减少因不同深度的水样的交换导致取出水样的误差;采用自动取水,克服了人工取水的局限性;在水中游动,利用水的浮力,克服了因重力原因导致的续航里程短的缺点。
2.技术方案
为解决上述问题,本发明采用如下的技术方案。
一种智能采集水样装置,包括取样瓶、硬质管、传感器、控制模块、流量计、阀门、动力机构、遥控器、电源;
硬质管与取样瓶固定连接且两者的底部平齐,传感器固定安装在硬质管的内侧壁上,且传感器位于硬质管的顶部,传感器与控制模块之间具有电性连接;
控制模块与动力机构之间具有电性连接,控制模块用于控制动力机构的启动或停止;
控制模块与遥控器之间通过无线模块通讯连接,遥控器用于对控制模块发出控制指令;
流量计与控制模块之间具有电性连接,流量计安装在安装在取样瓶瓶口的内侧;
阀门安装在取样瓶的瓶口处,阀门与控制模块之间具有电性连接,控制模块用于控制阀门的开合;
电源与控制模块之间具有电性连接,电源用于给控制模块提供电能;
电源与动力机构之间具有电性连接,电源用于给动力机构提供电能。
进一步的,动力机构包括第一电机、第二电机、第三电机和第四电机;
第一电机、第二电机、第三电机均固定安装在取样瓶的外侧壁上,两相邻的电机呈120度夹角布置,第四电机固定安装在取样瓶的下端。
进一步的,第一电机、第二电机、第三电机和第四电机均是潜水电机。
进一步的,传感器是激光测距传感器。
进一步的,无线模块是2.4g模块。
进一步的,阀门是电磁阀。
进一步的,电源的外侧设有防水处理单元。
进一步的,控制模块包括单片机。
进一步的,单片机的型号是STM32F103C6。
进一步的,单片机具有如下控制流程:
步骤1:遥控器通过无线模块给控制模块发指令;
步骤2:控制模块接收到信号后,控制电机1、电机2、电机3和电机4执行位移操作;
步骤3:当控制模块接收到取水样指令时,控制模块确认水深指令与传感器测距测得的深度是否一致,若水深与传感器测得的水深一致,则进入步骤4,若水深与传感器测得的水深不一致,则进入步骤5;
步骤4:打开阀门开关,并检测进水量,并进入步骤6;
步骤5:控制电机4转动,调整采样瓶的深度,并返回步骤2;
步骤6:判断流量是否达到预设阈值,若流量达到预设阈值,则关闭阀门开关,若流量未达到预设阈值则返回步骤4。
3.有益效果
相比于现有技术,本发明的优点在于:
一、本发明可以实现定深采集水样,在第四电机的驱动下,采样瓶到达指定的深度时,激光测距传感器将测得的深度信号传输给控制模块,控制模块比较深度是否一致,当深度一致时,打开阀门,同时流量计检测进水量,进水量达到预设阈值时,关闭阀门,当深度不一致时,继续驱动电机运转,直至深度达到一致。
二、本发明在横向水流作用下硬质管不会弯曲,可以有效减少因横向水流的原因导致的深度方面的误差。
三、取样瓶在指定深度采样技术后,关闭阀门,有效避免了不同深度的水样的交互过程,提高了定深采样的准确性。
四、本发采用无线传输模块控制,对于污染严重或突发化学品泄露的水域,环境恶劣,或者存在有毒有害物质或气体的取样位置,采用本发明中的采样装置,可以有效保障采样人员的生命安全。
五、本发明在采集完水样返回过程中,水样在电机的驱动下移动至人们指定的位置,与现有技术中无人机采样相比较,无人机需克服水样的重力飞行至指定的位置,由于无人机负重有限,负重飞行的时间有限,不能长时间负重飞行,导致了局限性,而本发明中采集完水样后,水样在水中的克服阻力与无人机克服重力比较,阻力较小,可以延长续航里程,节约成本。
附图说明
图1是本发明的前视结构示意图;
图2是本发明的俯视结构示意图;
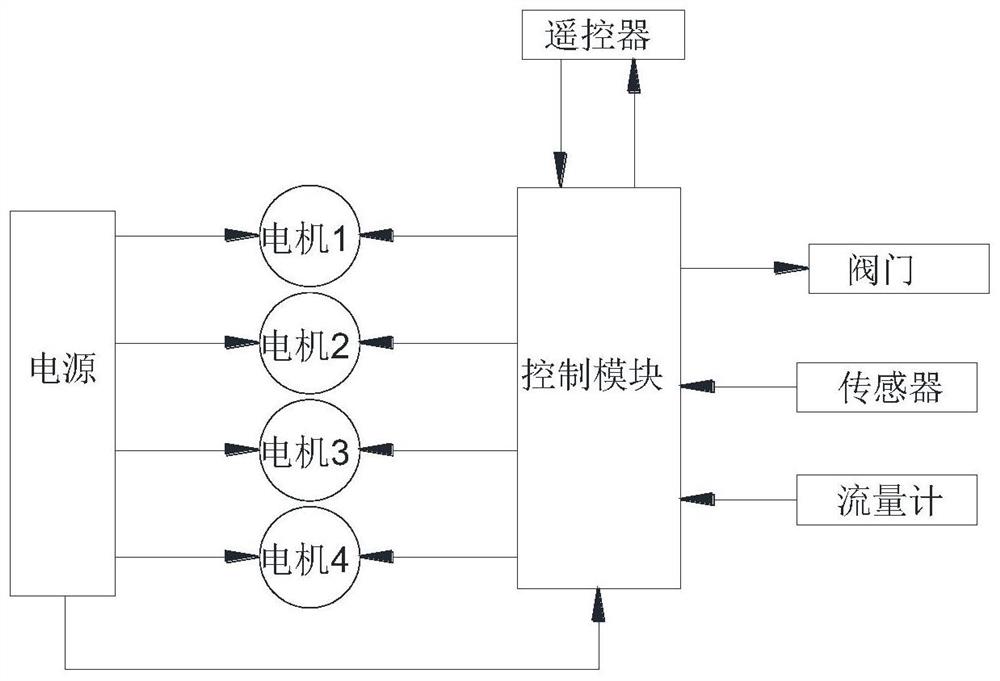
图3是本发明的原理框架图;
图4是本发明的电路图;
图5是图4中激光测距模块图;
图6是图4中电磁阀开关控制模块图;
图7是图4中2.4g无线收发模块图;
图8是图4中流量测量模块图;
图9是图4中供电模块图;
图10是图4中电机接线模块图;
图11是图4中电机驱动模块图;
图12是图4中单片机控制模块图;
图13是本发明的单片机控制流程图。
图中标号说明:
1、取样瓶;2、硬质管;3、传感器;4、控制模块;5、流量计;6、阀门;7、第一电机;8、第二电机;9、第三电机;10、第四电机。
具体实施方式
如图1-13所示,一种智能采集水样装置,包括取样瓶1、硬质管2、传感器3、控制模块4、流量计5、阀门6、动力机构、遥控器、电源;
硬质管2与取样瓶1固定连接且两者的底部平齐,测得硬质管2的下端深度,就可以确保取样瓶1的采样深度。由于硬质管2的材质是硬质材料制成,在横向水流作用下不易弯曲,可以有效保证取样深度,在采样深度方面提高准确性。
传感器3固定安装在硬质管2的内侧壁上,且传感器3位于硬质管2的顶部,传感器3与控制模块4之间具有电性连接;传感器3是激光测距传感器。可以测得硬质管2上端距离水面的距离,从而可以得出取样瓶1的深度。
控制模块4与动力机构之间具有电性连接,控制模块4用于控制动力机构的启动或停止;
动力机构包括第一电机7、第二电机8、第三电机9和第四电机10;第一电机7、第二电机8、第三电机9均固定安装在取样瓶1的外侧壁上,两相邻的电机呈120度夹角布置,第一电机7、第二电机8、第三电机9可以驱动取样瓶1移动至所需采样的经纬坐标。
第四电机10固定安装在取样瓶1的下端,第四电机10可以驱动取样瓶1移动至所需采样的深度。
第一电机7、第二电机8、第三电机9和第四电机10均是潜水电机。
控制模块4与遥控器之间通过无线模块通讯连接,遥控器用于对控制模块4发出控制指令;无线模块是2.4g模块。
流量计5与控制模块4之间具有电性连接,流量计5安装在安装在取样瓶1瓶口的内侧;流量计5可以检测进水量,并将进水量的多少反馈给控制模块4。
阀门6安装在取样瓶1的瓶口处,阀门6与控制模块4之间具有电性连接,控制模块4用于控制阀门6的开合;
电源与控制模块4之间具有电性连接,电源用于给控制模块提供电能;
电源与动力机构之间具有电性连接,电源用于给动力机构提供电能。
阀门6是电磁阀。
电源的外侧设有防水处理单元。
控制模块4包括单片机。
单片机的型号是STM32F103C6。
操作步骤如下:
步骤1:工作人员手持遥控器通过2.4g无线收发模块给控制模块发指令;
步骤2:控制模块接收到信号后,控制电机1、电机2、电机3和电机4执行位移操作;电机1、电机2、电机3可以驱动取样瓶1在水平方向移动,使取样瓶1到达需采集水样的经纬坐标,电机4可以驱动取样瓶1到达需采集水样的深度坐标;
步骤3:当控制模块接收到取水样指令时,控制模块确认水深指令与传感器测距测得的深度是否一致,若水深与传感器测得的水深一致,则进入步骤4,若水深与传感器测得的水深不一致,则进入步骤5;
步骤4:打开阀门开关,并检测进水量,并进入步骤6;
步骤5:控制电机4转动,调整采样瓶的深度,并返回步骤2;
步骤6:判断流量是否达到预设阈值,若流量达到预设阈值,则关闭阀门开关,若流量未达到预设阈值则返回步骤4。
- 一种智能采集水样装置
- 一种用于无人艇的智能采集水样装置