一种带电作业辅助臂
文献发布时间:2023-06-19 12:14:58
技术领域
本发明涉及电力作业臂技术领域,具体为一种带电作业辅助臂。
背景技术
受气候等因素影响,北方地区多采用瓷质绝缘子,运行经验表明:瓷质绝缘子长时间运行,会出现不同程度的劣化,瓷质绝缘子本体呈现低值、零值,此时一旦遭受雷击,将会导致断串,造成大面积停电。常用的测零方式分为两种,一种是操作杆火花间隙检测法,另一种是通过机器人或红外、紫外等非接触式检测的新型检测法。但现场实践经验表明,发现其在测零方式、测零效果、安全性能等方面均存在大量问题。
对于操作杆火花间隙检测法,操作杆的操作为费力杠杆模型,对作业人员的体力是极大考验,更不利于作业人员的人身安全。而新型检测方法中,机器人测零虽然能够实现自动检测,但仍需要人工收回,未减轻工作人员的工作负担;紫外、红外等检测方法可避免人工登杆作业,但由于测量参数为间接量,受到强电场、强磁场影响,劣化绝缘子特性极易被掩盖,误判率居高不下,无法推广应用。因此急需一种既可以改变操作杆的支撑方式进而达到省时省力的效果,又可以方便使用的产品。
例如专利号为CN201910821602.6的专利,公开了一种可穿戴式三自由度人体辅助外机械臂,包括:依次相连的背部穿戴结构、手臂结构和机械抓手结构,以及机械臂电路系统,其中:机械臂电路系统分别与背部穿戴结构、手臂结构和机械抓手结构相连,通过多种控制方式传递运动指令实现精准控制;手臂结构包括:上部支座和设置于其上的驱动机构、传动机构和大小臂机构;机械抓手结构包括:固定连轴座、活动连轴座、传动丝杆、手部连杆、取物手爪和开合驱动电机;背部穿戴结构包括:伸缩固定带、背部固定板、底部支座、转动云台座和保护盖;本发明通过肩部旋转自由度、俯仰自由度以及夹角自由度,用来实现手臂结构的移动和机械抓手结构的抓取,从而完成具体工作任务。
现有的辅助臂多为费力杠杆模型,如绝缘操作杆等,该类型工具在作业过程费力点为前手臂支撑点,需承担工具本体以及后手臂下压力的共同作用,使得操作人员在使用过程中耗费了大量的体力,尤其是在带电作业工程中,过度消耗工作人员的体力将直接威胁到作业人员的人身安全。
发明内容
本发明的目的在于提供一种带电作业辅助臂,以解决上述背景技术中提出作业过程费力点为前手臂支撑点,需承担工具本体以及后手臂下压力的共同作用,使得操作人员在使用过程中耗费了大量的体力的问题。
为实现上述目的,本发明提供如下技术方案:一种带电作业辅助臂,支撑骨架(1),包括:其特征在于,
所述支撑骨架包括L状挂板、定位框和矩形固定板,所述支撑骨架整体呈土字形结构,其中间竖撑板的顶端对称焊接有两处倾斜羊角杆,此两处倾斜羊角杆的顶端对称焊接有两处L状挂板,此两处L状挂板上对称贯穿插装有两处缓冲机构,且支撑骨架底部以及中间左右四处横撑板的外侧段上对称焊接有四处定位框,此四处定位框上均贯穿滑动安装有四处限位机构,支撑骨架底侧的中间位置锁紧安装有一处矩形固定板,这处矩形固定板的右端转动安装有一处摆动臂缓冲机构;两处所述缓冲机构的竖撑部分对称贯穿插装于支撑骨架中间位置的两处横撑板上;摆动臂;所述摆动臂整体呈横撑矩形结构,其前端向上倾斜折拐,且摆动臂的最顶端转动连接有一处竖撑支轴,此竖撑支轴的顶端转动安装有一处转向机构,且转向机构的中心轴孔中插装有一处操作杆;所述支撑骨架还包括驱动齿轮,所述支撑骨架的中间竖撑板上呈上下对称焊接有两处横撑杆,此两处横撑杆的两端对称转动安装有四处驱动齿轮,此四处驱动齿轮转轴的前端均焊接有一处小齿轮;所述缓冲机构包括弧形卡腕,两处弧形卡腕的顶端均对称焊接有两处竖撑轴,此左右两组竖撑轴通过弹簧顶推与两处L状挂板贯穿滑动配合,且两组竖撑轴的顶端均焊接固定有一处L状支杆;齿条杆,两处弧形卡腕上两组竖撑轴顶端L状支杆上均向下焊接有一处Z形齿条杆。
优选的,两处所述弧形卡腕跟随两处L状挂板下滑卡压于双肩上,且两处齿条杆对应与左右两组驱动齿轮转轴前端的小齿轮啮合接触。
优选的,所述摆动臂包括
平行连杆,两处平行连杆转动连接于摆动臂的首端;
定位柱,定位柱转动连接于两处平行连杆的首端;
拉簧,拉簧转动倾斜挂拉于摆动臂与定位柱之间。
优选的,所述竖撑支轴的尾端转动连接有一处横撑安装条,此横撑安装条的首端焊接有一处球头,此球头转动镶嵌于定位柱的尾端段上。
优选的,所述转向机构为三个重心点相同直径依次递减的三处圆环组成的三轴同心圆形万向节套筒。
优选的,所述第二层圆环横向转动安装于最外层圆环中,最内层圆环纵向转动安装于第二层圆环中,且三层圆环分别绕X、Y、Z轴旋转。
优选的,所述限位机构包括
横撑轨道轴,两处横撑轨道轴对应与定位框贯穿滑动配合,且两处横撑轨道轴的尾端焊接有一处开设有方形贯穿槽的主体竖撑夹板;
驱动齿条,两处横撑轨道轴的顶端上方间隔焊接有一处驱动齿条,此驱动齿条焊接于两处横撑轨道轴尾端的主体竖撑夹板上,四处驱动齿条对应与四处驱动齿轮啮合传动;
横撑卡板,底部左右两组横撑轨道轴尾端的两处主体竖撑夹板上均垂直折拐焊接有一处横撑卡板。
与现有技术相比,本发明的有益效果是:
1、本发明提供了一种改变费力杠杆模型支撑方式的带电作业辅助臂,依托本装置可将操作杆作用于前手臂的支撑力分散到全身。与现有的费力杠杆操作杆作业相比,改变了原有的支撑方式,极大的提高了工作的效率,节省了人力物力,保证了作业人员在带电作业时的人身安全;
2、本发明通过两处齿条杆,两处缓冲机构在装置重力驱使上滑时可联动驱使四处驱动齿轮旋转,为四处限位机构提供内滑夹紧的驱动力,这省去人工内滑夹紧四处限位机构的麻烦,且两处缓冲机构在弹簧的顶推下向下回滑时可驱使四处限位机构自动外滑;
3、本发明转向机构内部的三层圆环分别绕X、Y、Z轴旋转,转向机构可对操作杆进行多自由度的灵活调节,满足多样化的作业需求,应用广泛;
4、本发明的两处平行连杆以及定位柱和摆动臂共同组成了一处平行四边形摇摆机构,拉簧倾斜拉伸挂撑于此平行四边形摇摆机构的对角点上,可抵消摆动臂向下的重力,形成唯一向上的作用力,只要拉簧处于伸缩范围内,可保证整个平行四边形摇摆机构始终保持平衡,这可放便灵活的将摆动臂摇摆调整保持在任意角度,省去人工出力保持摆动臂姿态的麻烦,使用方便省力。
附图说明
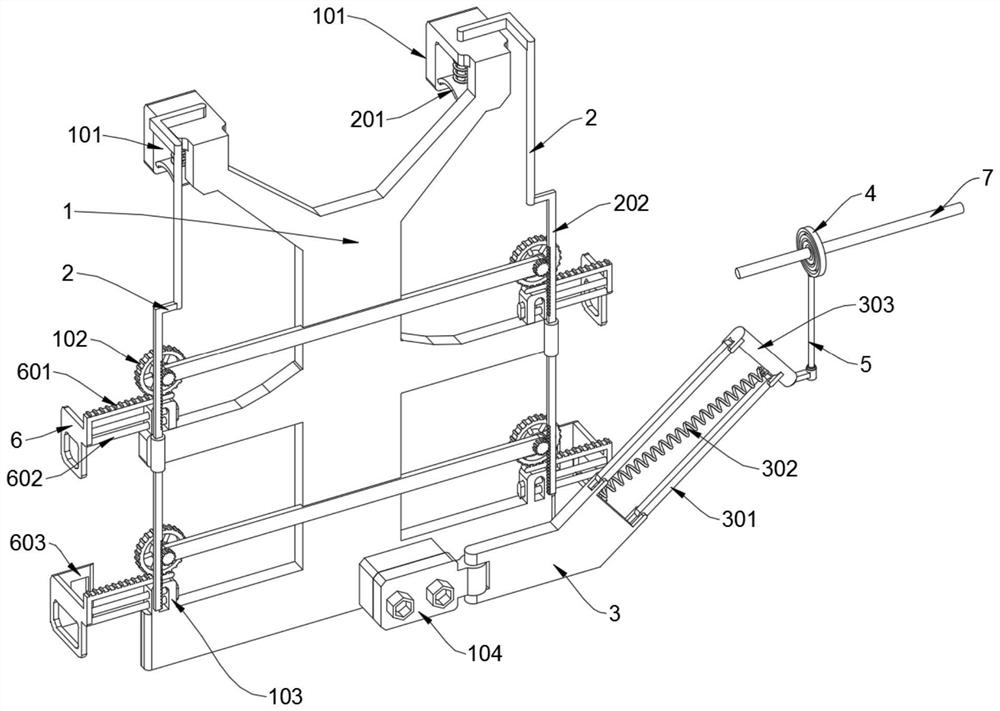
图1为本发明结构示意图;
图2为本发明后侧三维结构示意图;
图3为本发明底部三维结构示意图;
图4为本发明摆动臂底部结构示意图;
图5为本发明转向机构示意图;
图6为本发明缓冲机构示意图;
图7为本发明限位机构示意图;
图8为本发明驱动齿轮结构示意图;
图中,部件名称与附图编号的对应关系为:
1、支撑骨架;
101、L状挂板;102、驱动齿轮;103、定位框;104、矩形固定板;
2、缓冲机构;
201、弧形卡腕;202、齿条杆;
3、摆动臂;
301、平行连杆;302、拉簧;303、定位柱;
4、转向机构;
5、竖撑支轴;
6、限位机构;
601、横撑轨道轴;602、驱动齿条;603、横撑卡板603;
7、操作杆。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
请参阅图1至图8,本发明提供的一种实施例:一种带电作业辅助臂,支撑骨架1,包括:其特征在于,
支撑骨架1包括L状挂板101、定位框103和矩形固定板104,支撑骨架1整体呈土字形结构,其中间竖撑板的顶端对称焊接有两处倾斜羊角杆,此两处倾斜羊角杆的顶端对称焊接有两处L状挂板101,此两处L状挂板101上对称贯穿插装有两处缓冲机构2,且支撑骨架1底部以及中间左右四处横撑板的外侧段上对称焊接有四处定位框103,此四处定位框103上均贯穿滑动安装有四处限位机构6,支撑骨架1底侧的中间位置锁紧安装有一处矩形固定板104,这处矩形固定板104的右端转动安装有一处摆动臂3;缓冲机构2;两处缓冲机构2的竖撑部分对称贯穿插装于支撑骨架1中间位置的两处横撑板上;摆动臂3;摆动臂3整体呈横撑矩形结构,其前端向上倾斜折拐,且摆动臂3的最顶端转动连接有一处竖撑支轴5,此竖撑支轴5的顶端转动安装有一处转向机构4,且转向机构4的中心轴孔中插装有一处操作杆7;支撑骨架1还包括驱动齿轮102,支撑骨架1的中间竖撑板上呈上下对称焊接有两处横撑杆,此两处横撑杆的两端对称转动安装有四处驱动齿轮102,此四处驱动齿轮102转轴的前端均焊接有一处小齿轮,四处驱动齿轮102与其转轴上的小齿轮直径比较大,这使得四处小齿轮对四处驱动齿轮102具有明显的提速作用,保证缓冲机构2即使进行较小幅度的滑动也可以驱使驱动齿轮102以及限位机构6进行大幅运动;缓冲机构2包括弧形卡腕201,两处弧形卡腕201的顶端均对称焊接有两处竖撑轴,此左右两组竖撑轴通过弹簧顶推与两处L状挂板101贯穿滑动配合,且两组竖撑轴的顶端均焊接固定有一处L状支杆,缓冲机构2能够缓解装置整体附加于人员双肩上的压力,减小作业时双肩的疲劳强度;齿条杆202,两处弧形卡腕201上两组竖撑轴顶端L状支杆上均向下焊接有一处Z形齿条杆202;两处弧形卡腕201跟随两处L状挂板101下滑卡压于双肩上,且两处齿条杆202对应与左右两组驱动齿轮102转轴前端的小齿轮啮合接触,通过两处齿条杆202,两处缓冲机构2在装置重力驱使上滑时可联动驱使四处驱动齿轮102旋转,为四处限位机构6提供内滑夹紧的驱动力,这省去人工内滑夹紧四处限位机构6的麻烦,简化了装置的装戴步骤,使用方便省力,且两处缓冲机构2在弹簧的顶推下向下回滑时可驱使四处限位机构6自动外滑。
进一步,摆动臂3包括
平行连杆301,两处平行连杆301转动连接于摆动臂3的首端;
定位柱303,定位柱303转动连接于两处平行连杆301的首端;
拉簧302,拉簧302转动倾斜挂拉于摆动臂3与定位柱303之间,两处平行连杆301以及定位柱303和摆动臂3共同组成了一处平行四边形摇摆机构,拉簧302倾斜拉伸挂撑于此平行四边形摇摆机构的对角点上,可抵消摆动臂3向下的重力,形成唯一向上的作用力,只要拉簧302处于伸缩范围内,可保证整个平行四边形摇摆机构始终保持平衡,这可放便灵活的将摆动臂3摇摆调整保持在任意角度,省去人工出力保持摆动臂3姿态的麻烦,使用方便省力。
进一步,竖撑支轴5的尾端转动连接有一处横撑安装条,此横撑安装条的首端焊接有一处球头,此球头转动镶嵌于定位柱303的尾端段上。
进一步,转向机构4为三个重心点相同直径依次递减的三处圆环组成的三轴同心圆形万向节套筒。
进一步,第二层圆环横向转动安装于最外层圆环中,最内层圆环纵向转动安装于第二层圆环中,且三层圆环分别绕X、Y、Z轴旋转,转向机构4可对操作杆7进行多自由度的灵活调节,满足多样化的作业需求,应用广泛。
进一步,限位机构6包括
横撑轨道轴601,两处横撑轨道轴601对应与定位框103贯穿滑动配合,且两处横撑轨道轴601的尾端焊接有一处开设有方形贯穿槽的主体竖撑夹板;
驱动齿条602,两处横撑轨道轴601的顶端上方间隔焊接有一处驱动齿条602,此驱动齿条602焊接于两处横撑轨道轴601尾端的主体竖撑夹板上,四处驱动齿条602对应与四处驱动齿轮102啮合传动;
横撑卡板603,底部左右两组横撑轨道轴601尾端的两处主体竖撑夹板上均垂直折拐焊接有一处横撑卡板603,四处限位机构6可将支撑骨架1限位卡紧于人体的上半身上,且四处限位机构6在闲置时处于外滑状态,避免对支撑骨架1的佩戴造成障碍。
在另一实施例中,可以在两处弧形卡腕201底部加装海绵缓冲垫或者橡胶垫,海绵缓冲垫或者橡胶垫可进一步缓冲双肩所受的压力,降低工作人员的疲劳强度,让工作更加轻松。
工作原理:只需将操作杆7插入转向机构4内部最中心处的圆环中,将竖撑支轴5底部的球头插入定位柱303的底部段中,将摆动臂3与矩形固定板104和支撑骨架1转动连接在一起,既可实现操作杆7的万向调节,并将操作杆7作用于前手臂的支撑力分散到全身;
缓冲机构2能够缓解装置整体附加于人员双肩上的压力,减小作业时双肩的疲劳强度,四处限位机构6可将支撑骨架1限位卡紧于人体的上半身上,且四处限位机构6在闲置时处于外滑状态,避免对支撑骨架1的佩戴造成障碍,通过两处齿条杆202,两处缓冲机构2在装置重力驱使上滑时可联动驱使四处驱动齿轮102旋转,为四处限位机构6提供内滑夹紧的驱动力,这省去人工内滑夹紧四处限位机构6的麻烦,且两处缓冲机构2在弹簧的顶推下向下回滑时可驱使四处限位机构6自动外滑;
四处驱动齿轮102与其转轴上的小齿轮直径比较大,这使得四处小齿轮对四处驱动齿轮102具有明显的提速作用,保证缓冲机构2即使进行较小幅度的滑动也可以驱使驱动齿轮102以及限位机构6进行大幅运动;
两处平行连杆301以及定位柱303和摆动臂3共同组成了一处平行四边形摇摆机构,拉簧302倾斜拉伸挂撑于此平行四边形摇摆机构的对角点上,可抵消摆动臂3向下的重力,形成唯一向上的作用力,只要拉簧302处于伸缩范围内,可保证整个平行四边形摇摆机构始终保持平衡,这可放便灵活的将摆动臂3摇摆调整保持在任意角度,省去人工出力保持摆动臂3姿态的麻烦。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
- 一种基于双机械臂和辅助臂的带电作业机器人控制系统
- 一种基于双机械臂和辅助臂的带电作业机器人控制系统