具有模态天线的移动计算设备
文献发布时间:2023-06-19 12:14:58
优先权要求
本申请要求于2019年1月31日提交的美国临时申请号62/799,071的名称为“Mobile Computing Device having a Modal Antenna”的优先权,其通过引用合并于此。
技术领域
本公开的示例方面一般地涉及天线控制领域,例如,被配置为在多种不同模式下操作的模态天线的控制。
背景技术
模态天线正越来越多地用于无线通信中,例如在智能手机中。这样的天线一般地比传统的无源天线提供更好的信号质量和更紧凑的外形。一种模态天线配置涉及配置为改变与驱动元件相关联的辐射图案的寄生元件。在这样的配置中,第一发送线可以将驱动元件与被配置为驱动该驱动元件的电路连接。单独的发送线可以将被配置为改变模态天线的模态特性的电路与寄生元件连接。
发明内容
本公开的实施例的方面和优点将在以下描述中部分阐述,或者可以从描述中获悉,或者可以通过实施例的实践来获悉。
本公开的示例方面涉及包括模态天线的移动计算设备。移动计算设备可以包括射频电路和在远离射频电路的位置处机械地耦合到移动计算的一部分的模态天线。模态天线可以包括驱动元件和位于驱动元件附近的寄生元件。模态天线可以在多种不同模式下操作。每个模式可以与不同的辐射图案相关联。移动计算设备可以包括将射频电路耦合到模态天线的发送线。射频电路可以被配置为通过发送线将RF信号发送到模态天线,并且被配置为通过发送线通信控制信号以调整模态天线的模式。
参照下面的说明书和所附权利要求书,将更好地理解各种实施例的这些和其他特征、方面和优点。结合在本说明书中并构成本说明书一部分的附图示出了本公开的实施例,并与说明书一起用于解释相关原理。
附图说明
本说明书中提出了针对本领域普通技术人员的实施例的详细讨论,该说明书参考了所附附图,其中:
图1A示出了根据本公开的示例实施例的模态天线10的实施例;
图1B示出了与图1A的模态天线相关联的二维天线辐射图案;
图1C示出了根据本公开的示例实施例的图1A的模态天线的示例频率图;
图2示出了根据本公开的示例实施例的示例天线系统的示意图;
图3示出了根据本公开的示例实施例的天线系统的示例控制电路的示意图;
图4示出了表示幅移键控调制和开关键控调制的简化示例的一系列时间对准图表;
图5示出了根据本公开的示例实施例的天线系统的示例调谐电路的示意图;
图6示出了根据本公开的示例实施例的天线系统的示意图,其中控制信号被调制到RF信号上并通过发送线发送到模态天线;
图7示出了根据本公开的示例实施例的天线系统的示意图,其中通过与发送线分离的控制线将控制信号发送到模态天线;
图8A描绘了根据本公开的方面的移动计算设备的实施例的透视图;
图8B描绘了图8A的移动计算设备的示意图;
图8C描绘了图8A和图8B的移动计算设备的铰链构件的透视图;
图9示出了移动计算设备的实施例,该移动计算设备包括机械地耦合到移动计算设备的铰链构件的模态天线;
图10示出了移动计算设备的另一实施例,该移动计算设备包括机械地耦合到移动计算设备的显示屏支撑构件的模态天线;
图11示出了移动计算设备的另一实施例,该移动计算设备包括机械地耦合到移动计算设备的显示屏支撑构件的模态天线;以及
图12是根据本公开的方面的用于控制移动计算设备的模态天线的方法的流程图。
在本说明书和附图中重复使用附图标记旨在表示本发明的相同或相似的特征或元件。
具体实施方式
现在将详细参考实施例,其一个或多个示例在附图中示出。每个示例是通过对实施例的说明来提供的,而不是对本公开的限制。事实上,对于本领域技术人员来说显而易见的是,在不背离本公开的范围或精神的情况下,可以对实施例进行各种修改和变化。例如,作为一个实施例的一部分所示或描述的特征可以与另一个实施例一起使用,以产生又一个实施例。因此,本公开的方面意在涵盖这样的修改和变化。
本公开的示例方面涉及用于控制移动计算设备的模态天线的系统和方法。移动计算设备可以包括机械地耦合(例如,物理支撑)到移动计算设备的构件的一个或多个模态天线。移动计算设备可以包括射频电路和在远离射频电路的位置处机械地耦合到移动计算的一部分的模态天线。例如,移动计算设备可以是膝上型计算机。模态天线可以耦合到膝上型计算机的铰链构件,该铰链构件耦合到主体和显示屏支撑构件中的每一个。在其他实施例中,模态天线可以耦合到显示支撑构件,并且射频电路可以耦合到主体。在其他实施例中,模态天线和射频电路中的每一个可以耦合到主体。
模态天线可以包括驱动元件和位于驱动元件附近的寄生元件。射频电路可以被配置为改变寄生元件的电特性以在多种不同模式下操作模态天线。射频电路可以被配置为通过发送线将RF信号发送到模态天线,并调整模态天线的模式。射频电路可以被配置为在发送线上通信控制信号以调整模态天线的模式。
在一些实施例中,移动计算设备可以包括显示屏支撑构件、主体和枢转地耦合到显示屏支撑构件和主体中的每一个的铰链构件。模态天线可以耦合到铰链构件。
在一些实施例中,移动计算设备可以包括耦合到铰链构件的附加模态天线。铰链构件可以在纵向方向上延长,并且可以具有在纵向方向上的长度(或者可以包括在纵向方向上延长的构件)。模态天线可以在纵向方向上与附加模态天线以间隔距离间隔开。铰链构件的长度与间隔距离的比可以小于约3。
在一些实施例中,移动计算设备可以包括膝上型计算机。
在一些实施例中,移动计算设备可以包括主体和枢转地耦合到主体的显示屏支撑构件。模态天线可以耦合到显示屏支撑构件。
在一些实施例中,射频电路可以耦合到主体。
在一些实施例中,构件可以包括包含显示屏的显示屏支撑构件。模态天线可以在显示屏支撑构件的边框(bezel)部分中耦合到显示屏支撑构件,该边框部分在显示屏的周长和显示屏支撑构件的周长之间。
在一些实施例中,移动计算设备可以包括显示屏支撑构件和枢转地耦合到显示屏支撑构件的主体。模态天线可以耦合到主体。
在一些实施例中,移动计算设备可以包括附加模态天线。显示屏支撑构件可以相对于主体绕纵向方向枢转。主体可以具有纵向方向上的主体宽度。模态天线可以在纵向方向上与附加模态天线以间隔距离间隔开。主体宽度与间隔距离的比可以小于约3。
在一些实施例中,发送线可以是单同轴电缆。
在一些实施例中,射频电路可以包括被配置为将RF信号发送到模态天线的前端模块和被配置为调整模态天线的模式的控制电路。
在一些实施例中,移动计算设备可以包括主处理器。射频电路可以被配置为通过第一连接从主处理器接收数据以经由RF信号发送,并且被配置为通过第二连接接收用于调整模态天线的模式的控制指令。第二连接可以不同于第一连接。
在一些实施例中,移动计算设备可以包括附加发送线和附加模态天线。附加模态天线可以包括驱动元件和位于驱动元件附近的寄生元件。附加模态天线可以在多种不同模式下操作。每个模式可以与不同的辐射图案相关联。射频电路可以被配置为通过附加发送线将附加RF信号发送到附加模态天线,并调整附加模态天线的模式。
在一些实施例中,移动计算设备可以包括调谐电路,该调谐电路被配置为控制与模态天线的寄生元件相关联的电特性以在多个不同模式下操作模态天线。射频电路可以包括控制电路,该控制电路被配置为将控制信号调制到RF信号上,以生成用于通过发送线通信到调谐电路的发送信号。调谐电路可以被配置为解调控制信号,使得射频电路可以经由控制信号来调整模态天线的模式。
在一些实施例中,移动计算设备可以包括附加模态天线,该模态天线包括驱动元件和位于驱动元件附近的寄生元件。附加模态天线可以在多种不同模式下操作。每个模式可以与不同的辐射图案相关联。附加调谐电路可以被配置为控制与附加模态天线的寄生元件相关联的电特性,以在多个不同模式下操作附加模态天线。附加发送线将射频电路耦合到附加模态天线。射频电路的控制电路可以被配置为将附加控制信号调制到附加RF信号上,以生成用于通过附加发送线通信到附加调谐电路的附加发送信号。附加调谐电路可以被配置为解调附加控制信号,使得射频电路可以经由附加控制信号调整附加模态天线的模式。
在一些实施例中,前端模块可以被配置为使用幅移键控调制将控制信号调制到RF信号上。
本公开的另一示例实施例涉及膝上型计算机,该膝上型计算机包括铰链构件、枢转地耦合到铰链构件的主体和枢转地耦合到铰链构件的显示屏支撑构件。膝上型计算机可以包括射频电路。模态天线可以耦合到铰链构件,并且可以包括驱动元件和位于驱动元件附近的寄生元件。模态天线可以在多种不同模式下操作。每个模式可以与不同的辐射图案相关联。膝上型计算机可以包括将射频电路耦合到模态天线的发送线。射频电路可以被配置为通过发送线将RF信号发送到模态天线,并且被配置为调整模态天线的模式。
在一些实施例中,射频电路可以被配置为将控制信号调制到RF信号上,以生成用于通过发送线进行通信的发送信号,以经由控制信号调整模态天线的模式。
在一些实施例中,膝上型计算机可以包括调谐电路,该调谐电路被配置为控制与模态天线的寄生元件相关联的电特性,以在多种不同模式下操作模态天线。射频电路可以包括控制电路,该控制电路被配置为将控制信号调制到RF信号上,以生成用于通过发送线通信到调谐电路的发送信号。调谐电路可以被配置为解调控制信号,使得射频电路可以经由控制信号来调整模态天线的模式。
在一些实施例中,膝上型计算机可以包括主处理器、被配置为控制与模态天线的寄生元件相关联的电特性,以在多种不同模式下操作模态天线的调谐电路以及附加模态天线。膝上型计算机可以包括附加调谐电路,该调谐电路被配置为控制与附加模态天线的寄生元件相关联的电特性,以在多种不同模式下操作附加模态天线。控制线可以将主处理器耦合到调谐电路。附加控制线可以将调谐电路耦合到附加调谐电路。主处理器可以被配置为通过控制线将控制信号和附加控制信号中的每一个发送到调谐电路。调谐电路可以被配置为通过附加控制线将附加控制信号发送到附加调谐电路。
在一些实施例中,膝上型计算机可以包括耦合到铰链构件的附加模态天线。显示屏支撑构件可以相对于铰链构件绕纵向方向枢转。铰链构件可以在纵向方向上延长,并且可以在纵向方向上具有长度。模态天线可以在纵向方向上与附加模态天线以间隔距离间隔开。铰链构件的长度与间隔距离的比可以小于约3。
在一些实施例中,膝上型计算机可以包括耦合到铰链构件并与射频电路可操作地连接的附加模态天线。附加模态天线可以包括驱动元件和位于驱动元件附近的寄生元件。附加模态天线可以在多种不同模式下操作。每个模式可以与不同的辐射图案相关联。射频电路可以被配置为向附加模态天线发送附加RF信号并调整附加模态天线的模式。
在一些实施例中,膝上型计算机可以包括调谐电路,该调谐电路被配置为控制与模态天线的寄生元件相关联的电特性,以在多种不同模式下操作模态天线。发送线可以将射频电路耦合到模态天线。射频电路可以被配置为将控制信号调制到RF信号上,以生成用于通过发送线通信到调谐电路的发送信号。调谐电路可以被配置为解调控制信号,使得射频电路可以经由控制信号来调整模态天线的模式。
本公开的另一示例实施例涉及膝上型计算机的铰链构件,其被配置为将主体构件与膝上型计算机的显示屏支撑构件枢转地耦合。铰链构件可以包括耦合到铰链构件的第一模态天线。第一模态天线可以包括驱动元件和位于驱动元件附近的寄生元件。模态天线可以在多种不同模式下操作。每个模式可以与不同的辐射图案相关联。第二模态天线可以耦合到铰链构件,该第二模态天线包括驱动元件和位于驱动元件附近的寄生元件,该模态天线可在多种不同模式下操作,每个模式与不同的辐射图案相关联。第一模态天线可以与第二模态天线间隔开。
图1A示出了根据本公开的方面的模态天线10的实施例。模态天线10可以包括电路板12(例如,包括地平面)和设置在电路板12上的驱动天线元件14。第一寄生元件15可以位于驱动天线元件14附近。例如,第一寄生元件15可以被定位为使得在第一寄生元件15中的电流影响驱动元件的辐射图案。例如,可以在电路板(例如,和地平面)和驱动天线元件14之间限定天线体积。第一寄生元件15可以至少部分地位于天线体积内。
第一有源调谐元件16可以与寄生元件15耦合。第一有源调谐元件16可以是无源或有源组件或一系列组件,并且可以被配置为通过可变电抗或短路到地来改变第一寄生元件14上的电抗,从而导致天线的频移。
在一些实施例中,第二寄生元件18可以设置在电路板12附近并且靠近驱动元件14,使得在第二寄生元件18中的电流影响驱动元件的辐射图案。第二寄生元件18可以位于天线体积的外部。驱动元件14可以具有宽度19。
第二寄生元件18可以与驱动元件14隔开间隔距离21。驱动元件14的宽度19与间隔距离21的比可以在约0.2至约10的范围内变化,在一些实施例中可在约0.5至约8的范围内变化,在一些实施例中在约1至约5的范围内变化。
第二寄生元件18还可以包括第二有源调谐元件20,其可以单独地包括一个或多个有源和/或无源组件。第二寄生元件18可以位于驱动元件14附近,并且也可以位于天线体积之外。
所描述的配置可以提供通过改变驱动天线元件上的电抗来改变其辐射图案特性的能力。改变天线辐射图案可以称为“波束控制”。在天线辐射图案包括零点的情况下,由于零点可以被移动到关于天线的可选位置(例如,以减少干扰),因此类似的操作可以被称为“零点操纵(null steering)”。在一些实施例中,第二有源调谐元件20可以包括开关,用于在“开”时将第二寄生电路连接到地,并在“关”时终止短路。然而,应当注意,例如通过使用可变电容器或其他可调部件,第一或第二寄生元件上的可变电抗可以进一步提供天线图案或频率响应的可变移动。例如,第一有源调谐元件16和/或第二有源调谐元件18可以包括可调谐电容器、MEMS器件、可调电感器、开关、可调移相器、场效应晶体管或二极管中的至少一个。
图1B示出了与图1A的模态天线相关联的二维天线辐射图案。辐射图案可以通过控制与模态天线10的第一和第二寄生元件16、18中的至少一个相关联的电特性来移动。例如,在一些实施例中,辐射图案可以从第一模式22移动到第二模式24或第三模式26。
图1C示出了根据本公开的一些方面的图1A的模态天线的示例频率图。可以通过控制与模态天线10的第一或第二寄生元件16、18中的至少一个相关联的电特性来移动天线的频率。例如,当第一和第二寄生元件被“关闭”时,可以获得天线的第一频率(f
为了说明和讨论的目的,图1A-图1C描绘了具有多个模式的一个示例模态天线。本领域普通技术人员使用在此提供的公开内容的将理解,在不脱离本公开内容的范围的情况下,可以使用其他模态天线和/或天线配置。如本文所使用的,“模态天线”是指能够在多种模式下操作的天线,其中每个模式与不同的辐射图案相关联。
图2示出了根据本公开的示例方面的天线系统100的实施例的示意图。天线系统100可以包括模态天线102。模态天线102可以包括驱动元件104和位于驱动元件104附近的寄生元件106。模态天线102可以在多个不同模式下操作,并且每个模式可以与不同的辐射图案相关联,例如如上所述参考图1A到1C所述。
调谐电路108可以被配置为控制与寄生元件106相关联的电特性,以在多种不同模式下操作模态天线102。调谐电路108可以被配置为从发送信号解调控制信号,并基于与控制信号相关联的控制指令来控制寄生元件106的电特性,例如参考图4和图5更详细地说明。
可调谐组件110可以与寄生元件106耦合,并且调谐电路108可以被配置为控制可调谐组件110以改变寄生元件106与电压或电流源或宿的电连接,例如将寄生元件106接地。
射频电路112可以被配置为向模态天线102的驱动元件104发送RF信号。例如,发送线114可以将射频电路112耦合到模态天线102。在一些实施例中,发送线114可以是单同轴电缆。射频电路112可以被配置为放大或以其他方式生成RF信号,该RF信号通过发送线114(作为发送信号的分量)被发送到模态天线102的驱动元件104。
在一些实施例中,射频电路112可以包括前端模块116和/或控制电路118。前端模块116可以被配置为生成和/或放大发送到驱动元件104的RF信号。控制电路118可以被配置为使用各种合适的调制技术将控制信号调制到RF信号上。例如,在一些实施例中,控制电路118可以被配置为使用使用幅移键控的调制来将控制信号调制到RF信号上以生成发送信号,例如,如下面参考图4更详细地说明。
发送线114可以与被配置为帮助组合和/或分离占用各种频带的信号的各种组件(例如,使用偏置三通(Bias Tee)电路)耦合。例如,第一偏置三通电路120可以将前端模块116和控制电路118与发送线114耦合。第一偏置三通电路120可以包括将发送线114与前端模块116耦合的电容器122以及将控制单元118与发送线114耦合的电感器124。第二偏置三通电路126可以将驱动元件104和调谐电路108与发送线114耦合。第二偏置三通电路126可以包括将发送线114与驱动元件104耦合的电容器128以及将发送线114与调谐电路108耦合的电感器130。
前端模块116可以通过第一偏置三通电路120的电容器122发送RF信号。控制电路118可以通过第一偏置三通电路120的电感器124将控制信号调制到RF信号上,以在发送线114中生成控制信号。调谐电路108可以经由第二偏置三通电路126的电感器130解调来自发送信号的控制信号。发送信号的RF信号的分量可以通过第二偏置三通电路126的电容器128发送到模态天线102的驱动元件104。
在一些实施例中,天线系统100可以包括物理上与第一电路板129分离的第一电路板129和第二电路板131。射频电路112可以设置在第一电路板129上,并且调谐电路108或模态天线102中的至少一个可以设置在第二电路板131上。这可以允许射频电路112在物理上与调谐电路和/或模态天线102分离,而不使用多条发送线或不利地影响天线系统100的操作。
在一些实施例中,可以在第一频带内定义RF信号,并且可以在与第一频带不同的第二频带内定义控制信号。例如,第一频带的范围可以从大约500MHz到大约50GHz,在一些实施例中从大约1GHz到大约25GHz,在一些实施例中从大约2GHz到大约7GHz,例如大约5GHz。第二频带的范围可以从大约10MHz到大约1GHz,在一些实施例中从大约20MHz到大约800MHz,在一些实施例中从大约30MHz到大约500MHz,在一些实施例中从大约50MHz到大约250MHz,例如大约100MHz。
图3示出了在图2所示的天线系统100的控制电路118的一个实施例的示意图。控制电路118可以包括处理器132,并且处理器132可以被配置为生成或接收用于改变模态天线102的模式(在图2中所示)的控制指令,或者以其他方式调整模态天线102的辐射图案的方向或频率。例如,处理器132可以从另一个处理器(在图3中由HOST表示)接收控制指令,并且可以生成包含描述指令的数据(在图3中由DATAN表示)的输出。数据可以具有任何合适的位深度。例如,在一些实施例中,数据可以是二进制格式。在其他实施例中,数据可以是十六进制格式、十进制格式等。
控制电路118还可以包括载波信号源134。在一些实施例中,载波信号源134可以被配置为生成包括正弦波的载波信号,该正弦波可以具有一般地恒定的频率。在其他实施例中,载波信号可以是或包括任何合适的信号。例如,在一些实施例中,载波信号可以是或包括任何合适的重复图案,并且不限于正弦或具有一般地恒定的频率。
控制电路118还可以包括调制器136,其被配置为将处理器的输出调制到载波信号上以产生控制信号(由在图3中的TX CHN表示)。调制器136可以包括多路复用器138,该多路复用器138被配置为将包含可以描述控制指令的数据(由在图3中的DATAN表示)的输出与来自载波信号源134的载波信号组合。例如,调制器136可以被配置为缩放来自载波信号源134的载波信号的幅度以产生控制信号,例如通过执行幅移键控调制(例如,开关键控调制),例如下面参考图4更详细地描述。调制器136还可以包括放大器140和偏置三通电路142。
图4示出了一系列时间对准的图表400,其表示幅移键控调制和开关键控调制的简化示例。二进制信号401可以以描述二进制数据集的方式在第一电压电平402和第二电压电平404之间交替。二进制信号401可以对应于处理器132的输出的简化示例,其可以包含描述控制指令的数据,例如如上所述参考图3所述。幅移键控调制可以包括通过将第一电压电平402表示为具有变化幅度的正弦信号406来表示二进制信号401。例如,正弦信号406可以具有表示二进制信号401的第一电压402的第一幅度408,并且可以具有表示二进制信号401的第二电压电平404的第二幅度410。
开关键控调制是一种幅移键控调制。在开关键控调制中,二进制信号401可以由具有变化幅度的正弦信号411表示。正弦信号411可以具有表示二进制信号401的第一电压电平402的第一幅度412。然而,第二电压电平404可以由不存在正弦信号406来表示。换言之,正弦信号406可以具有约为零的幅度以表示二进制信号401的第二电压404。
图5示出了根据本公开的各方面的调谐电路500的一个实施例的示意图,例如对应于上面参照图3讨论的调谐电路108。调谐电路500可以包括解调器502和偏置504。解调器502可以包括与偏置504耦合的偏置三通电路506,以及与通信线114(在图2中示出)耦合的多路复用器507。
调谐电路500还可以包括被配置为过滤至少一个频带的低通滤波器508。例如,低通滤波器508可以被配置为对高于载波信号频率的频率的至少一个频带进行滤波。因此,低通滤波器508可以隔离或相对增加载波信号频率的强度。解调器502还可以包括二极管510,诸如zenner二极管。二极管510可以与逻辑电路512耦合,该逻辑电路512被配置为解释与控制信号相关联(例如,包含在其中)的控制指令。
逻辑电路512(例如,被配置为执行计算机可读指令以实现逻辑操作的处理器、ASIC等)还可以被配置为基于与控制信号相关联(例如,包含在其中)的控制指令来控制开关514的操作。开关514可以接地并且被配置为在多个状态之间切换。例如,开关514可以被配置为选择性地将开关514的输出516与地连接,或者以其他方式改变输出516的电连接,以控制与寄生元件106(在图2中所示)相关联的电特性,并在多种不同模式下操作模态天线。例如,开关514可以被配置为调整可调谐组件110(在图2中示出)的操作,以改变寄生元件106与源或宿(例如,电压源/宿或电流源/宿)的电连接,例如,开关514可以被配置为选择性地将寄生元件106接地。
作为两个时钟频率之间的相对差的频率漂移可能在与调谐电路108、500相关联的本地时钟频率和与控制电路118相关联的时钟频率(例如,主时钟频率)之间发展。为了最小化频率漂移,调谐电路108、500可以被配置为使本地时钟频率与主时钟频率同步。
例如,第一时钟频率可以与发送信号相关联,并且调谐电路500可以被配置为使与调谐电路500相关联的本地时钟频率与第一频率同步。第一时钟频率可以对应于(例如,等于或为其倍数)由正弦波源134或与控制电路118相关联的另一谐波源生成的载波信号的频率。例如,第一时钟频率可以存在于具有非零幅度的控制信号的部分中。
调谐电路500(例如,逻辑电路512)可以包括可调谐频率源,诸如被配置为提供与调谐电路500相关联的本地时钟频率的本地可调谐振荡器(例如,环形振荡器)。逻辑电路512可以被配置为对逻辑电路512(例如,从二极管510)接收的信号进行采样,并且针对该信号执行频率搜索操作。频率搜索操作可以确定适当的采样频率。例如,逻辑电路512可以在对应于预期短语的时间段内对控制信号(或由二极管510输出的其调节版本)进行采样。预期短语可以包括预期出现在控制信号中的信号模式。例如,预期短语可以在一个或多个发送的数据“帧”的开始和/或结尾处作为“前导”或“后导”出现。逻辑电路512可以被配置为识别或检测期望短语以定位帧的开始和/或结束。然后,逻辑电路512可以根据预期的短语,根据样本中存在的本地振荡器“时钟边沿”的数量与样本中预期存在的本地振荡器“时钟边沿”的数量进行比较,来确定测量的相位误差。
然后,逻辑电路512可以执行频率搜索操作。例如,频率搜索操作可以包括重复以下步骤:(1)在与预期短语的长度相对应的时间段内采样,(2)通过比较样本中存在的时钟边沿的数量和预期时钟边沿的数量来确定相位误差,以及(3)调整本地时钟频率(例如,本地振荡器的频率),直到本地时钟频率与和控制电路118相关联的主时钟频率充分同步。例如,当相位误差小于阈值(例如,预定阈值)时,可以确定本地时钟频率充分同步。
在一些实施例中,调谐电路可以采用数控振荡器,该振荡器被配置为对由调谐电路接收的信号的数据边沿转变进行计数。如果数据边缘转变的数量落在预期范围(例如,预定范围)之外,则调谐电路可以拒绝或忽略相关联的数据帧。
如果数据边沿转变的计数落在预期范围内,则调谐电路可以调整与调谐电路的内部振荡器相关联的频率(例如,本地时钟频率)。例如,调谐电路可以被配置为增加或降低内部振荡器频率,以补偿调谐电路的内部振荡器频率的频率与和RF电路和/或控制电路相关联的时钟或振荡器频率之间的漂移,这可能在正常操作期间发生。
图6示出了根据本公开的各方面的天线系统600的实施例的另一实施例的示意图。天线系统600通常可以类似于上面参考图2描述的天线系统100。例如,天线系统600可以包括模态天线602,该模态天线602包括驱动元件604和寄生元件606、调谐电路608、RF电路612、发送线614、前端模块616、控制电路618、包括电容器622和电感器624的第一偏置三通电路620、以及包括电容器628和电感器630的第二偏置三通电路626。
天线系统600还可以包括第二模态天线632,该第二模态天线632包括驱动元件634和寄生元件636。第二调谐电路638可以被配置为控制与寄生元件636相关联的电特性,以在多种不同模式下操作模态天线632。例如,第二可调谐组件640可以与寄生元件636耦合,并且调谐电路638可以被配置为控制第二可调谐组件640以改变第二模态天线632的寄生元件636与电压或电流源或宿的电连接,诸如将寄生元件106接地。
射频电路612可以包括第二前端模块642和第二发送线644。第二前端模块642可以被配置为生成和/或放大第二RF信号。控制电路618可以被配置为将第二控制信号调制到第二RF信号上以生成第二发送信号。在一些实施例中,控制电路618可以使用幅移键控调制将第二控制信号调制到第二RF信号上,例如,如上面参考图3和图4所说明的。
第二发送线644可以使用被配置为帮助占用各种频带的信号的组合和/或分离的偏置三通来与各种组件耦合。例如,第三偏置三通电路646可以将第二前端模块642和控制电路618与第二发送线644耦合。第三偏置三通电路646可以包括将第二前端模块642与第二发送线644耦合的电容器648和将控制单元618与第二发送线644耦合的电感器650。
第四偏置三通电路652可以将第二发送线644与第二模态天线632的驱动元件634和调谐电路108耦合。第四偏置三通电路652可以包括将第二发送线644与第二模态天线632的驱动元件634耦合的电容器654和将第二发送线644与第二调谐电路638耦合的电感器656。
第二前端模块642可以通过第三偏置三通电路646的电容器648发送第二RF信号。控制电路618可以通过第三偏置三通电路646的电感器650将第二控制信号调制到第二RF信号上,以生成第二发送信号。第二调谐电路638可以经由第四偏置三通电路652的电感器656对来自第二发送信号的控制信号进行解调。第二发送信号的RF信号分量可以经由第四偏置三通电路652的电容器654发送到第二模态天线632的驱动元件634。
在该实施例中,控制电路618可以具有与每条发送线614、644相关联的单独输出。控制电路618可以类似地被配置为上面参照图3描述的控制电路118,并且可以包括被配置为为第二发送线644提供单独输出的附加或组件。例如,控制电路618可以包括第二处理器132、正弦波源134、调制器136、多路复用器138、放大器140和/或偏置三通电路142,从而提供第二输出。
在一些实施例中,天线系统可以包括多入多出(MIMO)配置中的多个天线。多对控制电路和调谐电路可以被配置为控制多个模态天线以及多个无源天线。例如,天线系统可以包括N个调谐电路(每个与相应的控制电路配对),其被配置为控制M个模态天线和(N-M)个无源天线的操作,其中N和M均为正整数,并且其中N大于或等于M。另外地,在一些实施例中,一个控制电路可以包括多个输出并与多个调谐电路配对,例如参考图6所述。在任何情况下,调谐电路的数量N可以在任何合适的数量范围内。例如,在一些实施例中,N的范围可以从2到20,或者更大。M的范围也可以从2到20,或者更大。
应当理解,在本公开的范围内可以有许多变化。例如,在其他实施例中,单独的控制电路可以与每条发送线614、644相关联。另外地,在其他实施例中,单个前端模块可以被配置为生成相应的RF信号。在一些实施例中,单个调谐电路可以被配置为控制与系统的每个模态天线的寄生元件相关联的电特性。此外,在一些实施例中,该系统可以包括多于两个模态天线。另外地,在一些实施例中,该系统可以包括一个或多个模态天线和一个或多个非模式或无源天线的组合,这些天线没有被配置为在多个模式下操作。在一些实施例中,一个或多个模态天线可以包括一个以上的寄生元件。单个控制电路可以被配置为调整与寄生元件相关联的各个可调谐元件,以控制与寄生元件相关联的电特性,并在多个不同模式下操作模态天线。在其他实施例中,可以使用多个控制电路来分别调整可调元件。应当理解,在本公开的范围内,还可以有其他的变化、修改、组合等。
图7描绘了根据本公开的各方面的天线系统700的另一实施例。天线系统700可以包括第一模态天线702、第二模态天线704(例如,附加模态天线)、第一调谐电路706和第二调谐电路708以及RF电路710。第一模态天线702可以包括驱动元件712、寄生元件714和可调谐组件716。第二模态天线704可以包括驱动元件718、寄生元件720和可调谐组件722。RF电路710可以被配置为通过第一发送线721将第一RF信号通信到第一模态天线702。RF电路710可以被配置为通过第二发送线723将第二RF信号通信到第二模态天线704。
天线系统700可以包括主处理器724(例如,中央处理单元)和将主处理器724耦合到第一调谐电路706的控制线726。附加控制线728可以将第一调谐电路706耦合到第二调谐电路708。主处理器724可以被配置为通过控制线726将控制信号和附加控制信号中的每一个发送到第一调谐电路706。第一调谐电路706可以被配置为基于控制信号控制与模态天线702的寄生元件714相关联的电特性(例如,使用可调组件716)以在模态天线702的多个不同模式下操作模态天线702。第一调谐电路706可以被配置为通过附加控制线728向第二调谐电路708发送附加控制信号。附加控制电路708可以被配置为基于附加控制信号来控制与附加模态天线704的寄生元件720相关联的电特性(例如,使用可调谐组件722),以在附加模态天线704的多个不同模式下操作附加模态天线704。
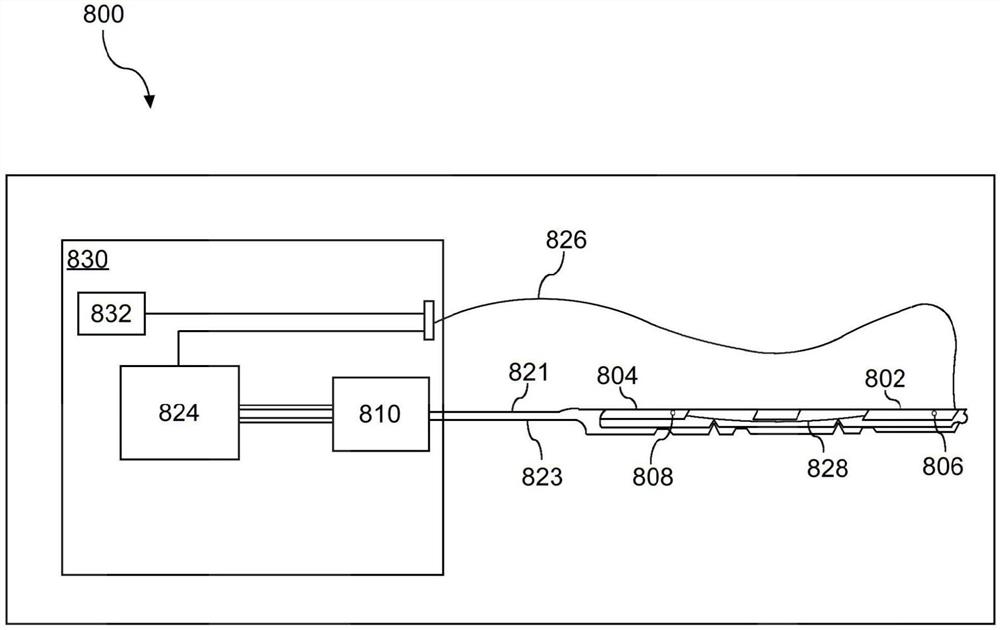
图8A和图8B描绘了根据本公开的各方面的移动计算设备800的实施例的透视图和示意图。图8C是图8A和图8B的铰链构件834的透视图。移动计算设备800可以是或包括膝上型计算机。然而,在其他实施例中,移动计算设备800可以是或包括任何合适类型的移动计算设备,诸如智能手机、平板电脑等。
参照图8B,移动计算设备800可以包括印刷电路板830和耦合到印刷电路板830的射频电路810。移动计算设备800可以包括主处理器824(例如,中央处理单元)和电源单元832。
参考图8A,移动计算设备800可以包括如上所述参考图7的天线系统700配置的天线系统,可以包括铰链构件834。主体836可以枢转地连接到铰链构件834。显示屏支撑构件838可以枢转地连接到铰链构件834。印刷电路板830可以耦合到主体836。模态天线802可以耦合到铰链构件834并且可操作地与射频电路810(图8B)连接。模态天线802可以包括驱动元件和位于驱动元件附近的寄生元件,并且可以在多种不同模式下操作,例如,如上所述参考图1A到图1C所述。附加模态天线804可以类似地耦合到铰链构件834并可操作地与射频电路810(图8B)连接。附加模态天线804可以包括驱动元件和位于驱动元件附近的寄生元件,并且可以在多种不同模式下操作,例如,如上所述参考图1A到图1C所述。
射频电路810、主处理器824和模态天线802、804通常可以如参考图7所描述的那样配置。模态天线802、804可以远离射频电路810。例如,模态天线802、804可以耦合到与射频电路810不同的移动计算设备的组件。一条或多条发送线821、823可以将射频电路810与模态天线802、804耦合。第一发送线821可以将射频电路810与模态天线802耦合;第二发送线823可以将射频电路810与附加模态天线804耦合。TA控制线826可以将主处理器824耦合到第一调谐电路806。附加控制线828可以将第一调谐电路806耦合到第二调谐电路808。主处理器824可以被配置为通过控制线826将控制信号和附加控制信号中的每一个发送到第一调谐电路806。第一调谐电路806可以被配置为基于控制信号控制与模态天线802的寄生元件814相关联的电特性(例如,使用可调谐组件816)以在模态天线802的多个不同模式下操作模态天线802。第一调谐电路806可以被配置为通过附加控制线828向第二调谐电路808发送附加控制信号。附加控制电路808可以被配置为基于附加控制信号控制与附加模态天线804的寄生元件820相关联的电特性(例如,使用可调谐组件822)以在附加模态天线804的多个不同模式下操作附加模态天线804。
图9示出了包括天线系统的移动计算设备900的另一实施例。天线系统可以如参考图6所描述的那样配置。模态天线902和/或附加模态天线904可以耦合到铰链构件934。主体936和显示屏支撑部件938中的每一个可以枢转地耦合到铰链构件934。显示屏940可以耦合到显示屏支撑构件938。调谐电路906可以被配置为基于控制信号控制与模态天线902的寄生元件相关联的电特性,以在模态天线902的多个不同模式下操作模态天线902。发送线926可以将射频电路910耦合到模态天线902。射频电路910可以耦合到与主体936耦合的印刷电路板930。
射频电路910可以被配置为将控制信号调制到RF信号上,以生成用于通过发送线926通信到调谐电路906的发送信号。调谐电路906可以被配置为解调控制信号,使得射频电路910可以经由控制信号来调整模态天线902的模式。
在一些实施例中,移动计算设备900可以包括附加模态天线904。附加调谐电路908可以被配置为控制与附加模态天线904的寄生元件相关联的电特性,以在多个不同模式下操作附加模态天线904。附加发送线928可以将射频电路910耦合到附加模态天线904。射频电路910可以被配置为将附加控制信号调制到附加RF信号上,以生成附加发送信号,用于通过附加发送线928通信到附加调谐电路908。附加调谐电路908可以被配置为解调附加控制信号,使得射频电路910可以经由附加控制信号调整附加模态天线904的模式。
铰链构件934可以沿纵向方向942延长。铰链构件934可以在纵向方向942上具有长度944。模态天线902可以在纵向方向942上与附加模态天线904以间隔距离946间隔开。铰链构件934的长度944与间隔距离946的比可以小于约3。
图10示出了移动计算设备1000的另一实施例,其一般地可以如上所述地相对于图9的移动计算设备900进行配置。然而,移动计算设备1000的模态天线1002和附加模态天线1004可以耦合到显示屏支撑构件1038。显示屏支撑构件1038可以包括显示屏1040。模态天线1002可以在显示屏支撑构件1038的边框部分1042中耦合到显示屏支撑构件1038。边框部分1042可以位于显示屏1040的周长1044和显示屏支撑构件1038的周长1046之间。
显示屏支撑构件1038可以具有沿纵向方向1050的宽度1048。模态天线1002、1004可以在纵向方向1050上以间隔距离1052间隔开。显示支撑构件1038的宽度1048与间隔距离1052的比可以小于约3。
图11示出了移动计算设备1100的另一实施例,其一般地可以如上所述地相对于图9的移动计算设备进行配置。模态天线1102和附加模态天线1104可以耦合到主体1136。主体1136可以在纵向方向1142上具有主体宽度1140。模态天线1102可以在纵向方向1142上与附加模态天线1104以间隔距离1144开。主体宽度1140与间隔距离1144的比可以小于约3。
应当理解,在一些实施例中,上面参考图7描述的天线系统700可以与位于显示屏支撑构件的边框部分中的模态天线一起使用,例如如上所述参考图10所述,或者与耦合到主体的模态天线一起使用,例如如上所述参考图11所述。
图12描绘了用于控制移动计算设备的模态天线的示例方法1200的流程图。本领域普通技术人员使用在此提供的公开内容将理解,可以省略、扩展、同时执行、重新排列和/或以各种方式修改在此描述的任何方法的各种步骤,而不会偏离本公开的范围。此外,可以在不偏离本公开的范围的情况下执行各种步骤(未示出)。另外地,一般地参考图2到图7描述的天线系统和/或参考图8A到图11描述的移动计算设备来讨论方法1200。然而,应当理解,本方法1200的方面可以发现适用于包括模态天线的任何合适的移动计算设备。
方法1200可以包括,在(1202)处,将RF信号从射频电路通信到模态天线,该模态天线在远离射频电路的位置处耦合到移动计算设备的一部分,例如,如上面参考图1A到图7所述。模态天线可以在多个不同模式下操作,并且每个模式可以与不同的辐射图案相关联。
方法1200可以包括,在(1204)处,从射频电路控制与模态天线的寄生元件相关联的电特性以调整模态天线的模式。例如,可以将控制信号从射频电路发送到调谐电路。控制信号可以通过将控制信号调制到RF信号上以生成用于在发送线上发送的发送信号来通过发送线通信到调谐电路,例如,如上面参考图2到图6和图9到图11所述。然而,在其他实施例中,控制信号可以通过与发送线分离的一条或多条控制线来发送,例如参考图7到图8B所述。
虽然已经针对其具体示例实施例详细描述了本主题,但是可以理解,本领域的技术人员一旦理解了前述内容,就可以容易地产生对这些实施例的更改、变化和等价物。因此,本公开的范围是通过示例而不是通过限制的方式进行的,并且本主题公开不排除包括对本领域普通技术人员显而易见的对本主题的修改、变化和/或添加。
- 具有模态天线的移动计算设备
- 具有自动访问模式控制的移动计算设备和可穿戴计算设备