用于测量待测量对象、特别是塑料型材的测量系统和方法
文献发布时间:2023-06-19 12:14:58
塑料产品在其制造之后通常要针对壁厚进行检查;特别是在挤出过程中,塑料产品的参数可能会发生变化,并且仍然软的塑料材料会发生形变并且形成缺陷部位或缩孔。在此已知的是,由塑料材料构成的测量对象在其制造之后通过太赫兹测量方法来测量。总得来说,TH
测量例如输送的塑料管或简单的塑料型材通常可以借助THz传感器以相对小的耗费来进行,以便由此检查层厚度。因此,可以从一个或多个测量位置出发例如对管或型材进行全面地透射,并且在多个界面上分别确定一个测量峰值。在此,需要相对数量少的测量位置,例如通过调节传感器或者通过围绕测量对象布置多个传感器。
因此,对挤出方法的控制也是已知的,其中通过确定层厚度可以相应地控制挤出设备,使得将所确定的主层厚度用于调节,例如管的壁厚。
然而,更复杂的成形体通常是有问题的,例如具有多个腹板和壁的型材用于构造不同的腔室或甚至例如具有密封唇口的型材。
此外,使用主动相控阵列布置原则上也是已知的,其中阵列布置具有多个THz收发器,这些THz收发器每个有时主动地发射THz辐射并检测反射的辐射,而有时仅被动地检测从另一个THz收发器发射和反射的辐射。因此,通过这种多进多出(MIMO)布置形式的大量不同的发射器和接受器可以对多个参考面进行计算。
此外,原则上雷达测量方法是已知的,其使用合成雷达孔径(SAR)。在此,雷达传感器沿着测量对象移动,并且在移动期间连续记录测量图像或测量信号。这种SAR测定尤其是从如飞机或卫星等飞行物上进行的并且能够实现对地形局部的二维描述。在此,传感器分别以足够大的辐射锥发射,使得来自不同测量位置的辐射锥叠加。由于发送器的测量位置是已知的,尤其是在调节方向(方位角方向)上从测量对象旁边经过时,测量图像在已知的测量位置处叠加。因此,目标区域中的对象以变化的视角被照射并被相应地检测。可以通过所接收的雷达回声的强度和相位合成大天线的孔径并由此实现天线的高的位置分辨率和运动方向。在此,可以使用雷达信号处理器或控制和计算设备来将各个振幅和相位这样相互连接,以便合成大图像作为虚拟模型,即海拔高度图。接收信号的相位也可以通过SAR计算算法进行校正,其中也可以校正各个天线位置之间的传输时间差并且因此可以考虑三角关系。在此,传输时间差可以作为相位差来测量。
因此,本发明的目的在于提供一种用于测量待测量对象的测量系统和方法,其使得即使复杂的测量对象也能够以相对小的耗费精确地确定。
该任务通过根据独立权利要求的测量系统和方法来解决。从属权利要求说明了优选的改进方案。根据本发明的测量系统尤其旨在用于执行根据本发明的方法;据本发明的方法特别地可以利用根据本发明的测量系统来实现。
此外,实现了由测量系统和待测量对象组成的测量布置。还实现了一种用于制造塑料型材的方法,其中使用了该方法用于测量。
因此,将主动相控阵列方法或多进多出方法(在该方法中,天线矩阵的各个THz收发器分别是有时主动和被动的)与SAR测量方法结合;这是基于这样的想法,SAR测量方法作为雷达方法已经在例如10GHz左右的相应的频率范围中是已知的,因此原则上也可以将对此已知的并且经过验证的计算方法或SAR超分辨率算法用于THz辐射,该THz频率范围例如可以达到从10GHz至50THz。SAR测量(在该SAR测量情况下由此雷达射束扫描例如地区的表面)也已经被用于确定所反射的辐射的反射峰。在THz测量由具有不同折射率的透明材料、尤其是塑料产品制成的测量对象时,同样产生反射峰,因为THz辐射在穿过边界面时例如以2%至7%、例如5%的强度被反射,因此可以根据高度雷达的反射峰计算该反射峰。因为在对具有多个边界面的测量对象进行透射时,测量峰在测量信号中逐个出现,因此各个测量峰可以被分配给不同的边界面。
相关的频率范围尤其作为频率下限是10GHz,尤其也为20GHz或50GHz,其中也例如在80GHz的情况下进行测量。作为频率上限,例如50THz是重要的,此外例如也可以是20THz或10THz,即,频率范围例如为[10GHz,20GHz,50GHZ;10THz,20THz,50THz].
通过将测量信号与主动相控阵列(即多进多出测量同步的THz收发器)相结合,和在多个测量位置上这样确定的测量信号的叠加的情况下进行的调节与SAR-计算相结合,可以模拟具有较大孔径的相控阵列天线,并且可以将高分辨率图像制作为虚拟模型。
特别地,天线阵列围绕测量对象所位于的对称轴的摆动或圆周运动可以作为调节运动来执行。天线阵列围绕对称轴的调节运动因此提供已知的测量位置作为SAR计算算法的位置信息。通过这样的摆动运动(其中天线阵列的光学主轴分别指向垂直于对称轴的方向),特别地,也通过具有逐渐主动和被动作用的THz-收发器的主动相控阵列布置的高角度分辨率,也保证了测量对象的不同的,部分地多样的面至少有时地在反射信号中被检测到。因此,每个面通常可以至少有时地被检测到;优选地,甚至天线矩阵的光学主轴可以有时垂直指向于每个面。
因此,通过在相应的测量位置的每次测量,可以首先确定反射峰,然后可以通过SAR计算方法将其叠加。
借助相控阵列进行的测量以及围绕测量对象的圆周运动以及SAR计算在此以特别的方式共同作用:
因此,不仅可以通过SAR计算方法对围绕测量对象的测量位置中的多个测量进行计算,而且已经可以对相控阵列测量的THz收发器的各个测量进行计算,即,在每个矩阵位置中的测量。
因为相控阵列测量的各个THz收发器的发射锥有利地已经在测量对象之前相交,所以在测量对象上存在发射锥的重叠;因此,相控阵列布置的THz收发器在每个测量位置上的逐次的分别测量描述了来自稍微偏移的测量位置的测量。随后将相控阵列调节到其他测量位置,特别是围绕测量物体,然后提供另外的THz测量,该THz测量又分别包含每个矩阵位置的多个逐次的单独THz测量。所有测量都可以通过SAR计算进行处理。SAR计算可以因此记录相控阵列布置的每个矩阵位置的各个THz测量值,并通过围绕测量对象的调节进行记录,从而可以处理大量的单个信号。
因此,可以分别确定测量对象的高分辨率的部分区段,尤其是塑料型材的高分辨率的部分区段。通过SAR方法的重建计算方法,随后可以将部分区段叠加到型材的共同的虚拟模型上。
然后,可以通过在虚拟模型中识别参考面并将层厚度或壁厚确定为这些边界面之间的距离,通过该虚拟模型计算壁厚。腔室的厚度也可以被认为是壁之间的空气层的层厚度。因此,有利地,与传统系统不同,层厚度不直接从测量信号确定,而是通过相控阵列测量的SAR计算方法首先确定虚拟模型中的参考面,并由此确定层厚度。
因此,也可以测量例如具有多个部分地倾斜延伸的腹板和壁的塑料型材。
此外,尤其也可以对测量对象的区域例如塑料型材的密封唇口进行测量,该密封唇口部分地不具有平面平行的边界面并且部分地是弯曲的或倾斜的。在这种密封唇口的情况下,通常不可能或不充分地可能借助THz测量装置从测量位置直接测量。因此,通过根据本发明的方法也可以在虚拟模型中识别这种密封唇口的构造并确定参考厚度。
尤其表明,收发器(即发送和接收设备的组合)的使用在此能够实现不同的测量功能性的特定组合并因此有助于虚拟模型的建立。
因此,根据本发明,也能够实现对型材,尤其具有一个或多个(多于一个)空腔或腔室的型材的测量和模拟,所述空腔或腔室优选明显比例如管或连续的条状体更复杂。因此,根据本发明,这种测量可以在连续和/或持续的型材输送方法中进行,例如直接在制造、尤其是挤出之后进行。
因此,也可以提供一种挤压方法,其中,借助于根据本发明的测量方法确定这种例如密封唇的参考厚度,并且随后通过测量装置的相应的控制信号对挤压进行这样的调整,使得根据目标构造,例如密封唇口的目标基准厚度进行调节。
下面将参照附图中的一些实施方式来解释本发明:
示出:
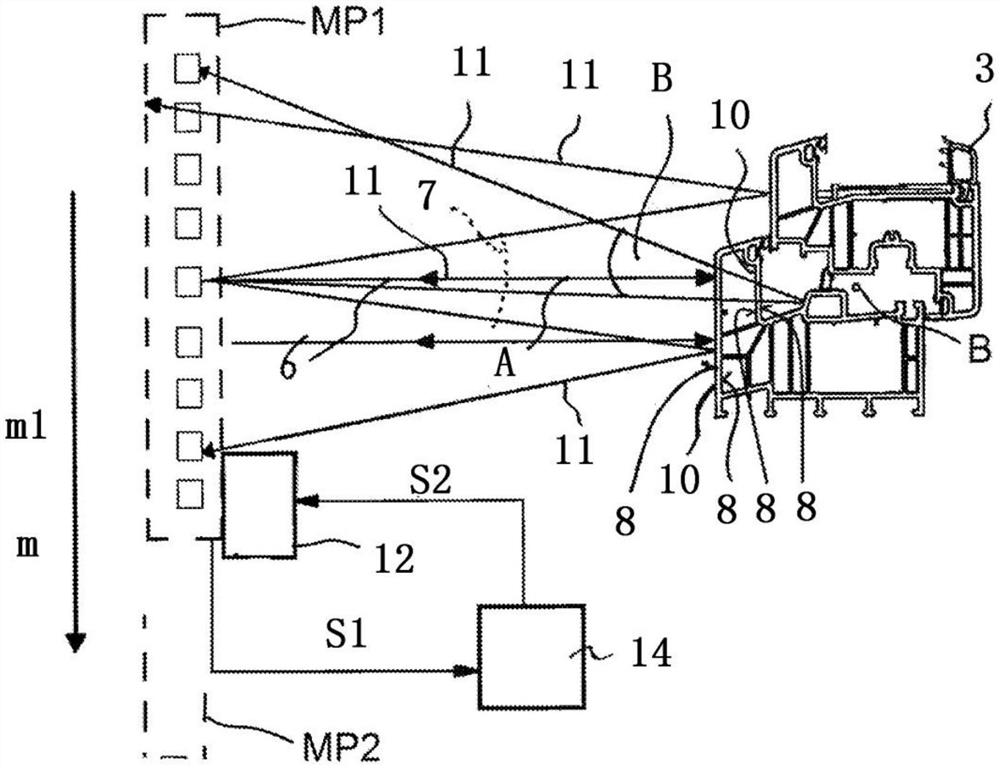
图1为根据本发明的实施方式的用于测量待测量物体的测量系统;
图2为图1中的在平移地调节天线矩阵时的测量系统;
图3为在天线矩阵偏转时与图2相应的视图;
图4为在测量另一个测量对象时在天线矩阵的不同测量位置中的测量系统;
图5为具有挤出机和测量系统的生产线,
图6为根据本发明的方法的流程图。
在测量布置1中设置有用于测量测量物体3的测量系统2。测量系统2包括具有矩阵布置的天线矩阵4,即特别是根据THz收发器5的二维规则布置。更具体地,如在中间的THz收发器5a处所示,每个THz收发器5沿具有辐射锥7的光轴A发射THz发射束6。THz发射束尤其处于0.01至50THz,尤其是0.02或0.05至10THZ或20THz的频率范围内。THz收发器5在该构造中被全电子地构造,即构造为天线偶极子。在此,THz发射射束6可以频率调制地发射,但也可以例如以时域光谱(TDS)或脉冲地发射。THz收发器5a因此根据图1将THz发射束6沿着光轴A发送到测量对象3上。
测量对象3在该实施方式中被构造为塑料型材并以横截面示出。有利地,该塑料材料是挤出的并且具有多个边界面8,所述边界面通常是腹板10或塑料材料的壁的一般边界面中相对于用空气填充的外部空间或也在内部用空气或气体填充的腔室9的边界面。
THz发射束6在从边界面8射入和射出时分别被部分地反射,其中,例如以5%的强度或振幅被反射并且因此THz发射束6的大部分继续穿过塑料型材3。因此,在图1中,例如两个绘制的腹板10,利用其边界面8分别将THz发射束6沿着光轴A反射回中间的THz反射回中间的THz收发器5a,该中间的THz收发器因此检测由边界面8构造的在反射回的THz辐射11中测量峰,并因此例如可以检测测量对象3或第一边界面8到太赫兹收发器5a的距离,腹板10a,10b的层厚度和边界面8之间的腔体9的宽度。
塑料型材3的边界面8的大部分不垂直于光轴A,使得在所述边界面上反射的THz辐射11以较大的反射角β反射回,所述THz辐射不能由THz收发器5a本身检测到。一些边界面8以这样的小的反射角β反射THz辐射11,使得THz辐射11被反射回矩阵布置4的另一个THz收发器5。因为矩阵布置4的另外的THz收发器5与中间的THz收发器5a同步,所以反射的THz辐射的如此接收的测量峰可以分配给中间的THz收发器5a的THz发射束6。因此,用作接收器的THz收发器5接收反射的THz辐射11或反射波,并且可以将其分配给THz发射束。波前在相邻的或随后的在此被动的THz收发器5上分别在时间上偏移的入射,从而可以由测量峰的测量时间的偏移或时间点以及此外由反射的THz辐射11相对于THz发射束6的反射角β来确定反射源,即塑料型材3的相关边界面8的距离和位置。
通过根据天线矩阵的原理的测量,由此不仅已经可以检测精确垂直的边界面8,而且也可以检测相对于光轴A略微倾斜地延伸的边界面8.
此外,根据图2设置,不仅一个确定的THz收发器,而且矩阵布置4的所有THz收发器5有时是主动的并且有时是被动的;相应的主动的THz收发器5分别沿着其光轴A发出具有相应的辐射锥7或张角的THz发射束6,并且所有其他THz收发器5则分别是被动的并且在发送时间点同步的情况下检测反射的THz辐射11。因此所有接收器也都行使发射器职能,即,构造一个多进多出的测量布置,在该布置中可以一次扫描较大面积,即,特别是对应于整个矩阵布置4的面积,
因此,已经能够检测和分配具有相对于光学主轴A的稍大的倾斜或更大的角度的边界面8。
由此可实现的边界面8的最大角度或倾斜角尤其取决于矩阵布置4的大小。此外,局部分辨率受到THz收发器5彼此的间距a的限制。
因此,根据另一有利的构造方案,如在图2中通过箭头所示,矩阵布置4通过调节装置12沿着调节方向m(方位角方向)相对于测量对象3调节,在此例如首先线性平移地调节。由此构造合成雷达孔径(SAR),其中太赫兹收发器5分别作为多进多出带有交替的主动的多个THz收发器的发送功能和接收功的构造实施测量,其中测量通过超分辨率算法处理。因此,在测量对象3静止并且天线矩阵4沿着调节方向m的调节运动已知的情况下,测量对象3相对于天线矩阵4的各个测量位置因此在调节运动中的位置是已知的,从而能够通过SAR算法进行相应的计算。
在传统的SAR中首先由每个THz收发器5检测和处理测量对象3的垂直边界面8,而在此将合成雷达孔径(SAR)与矩阵布置4的分别主动的和被动的THz收发器5的MIMO测量原理组合。由此,已经可以生成具有高分辨率的角度和位置数据的非常精确的图像。
矩阵布置4的各个THz收发器5将测量信号S1提供给控制和计算设备14,该控制和计算设备相应地对测量信号S1进行计算。在根据图2的MIMO构造中,在控制和计算设备14中由此可以在考虑二维矩阵布置4中的THz收发器5的间距a和相应的发射时间点同步的情况下将同步数据作为基础。控制和计算设备14此外借助于控制信号S2调节装置12,该控制信号S2用于设置天线矩阵4相对于静止的测量对象3的测量位置。
根据图3被构造为MIMO的矩阵布置4设置为摆动运动,尤其是围绕测量对象3的的、摆动运动m2。矩阵布置4可以例如围绕测量对象3摆动180°,或者也可以在整个圆周上旋转,例如围绕测量对象3进行圆周运动。在此,如果测量对象3不是正好位于圆周运动的中心或圆周运动的摆动轴的中心,原则上也是没有问题的,因为根据本发明可知,由此构造的通过摆动运动和相对于测量对象3的各个THz收发器5的大量不同的位置及其不同的边界面已经实现了非常高的分辨率,并且在不规则的测量对象3的情况下无论如何的对对称轴的定义都是部分地不明确的。
在根据图3的摆动运动中,测量对象3的每个边界面8根据其相应的取向被多次检测,其中,该边界面在某个时刻垂直于用作MIMO-SAR阵列的矩阵布置4的THz收发器5之一,从而在该测量中每个边界面8都被检测和检测。有利地,多次检测边界面8以便能够对测量进行平均。因此,边界面8通过MIMO布置仅对于垂直情况在大角度范围中被检测。
因此,通过具有附加MIMO布置的天线阵列4扩展了原则上被设计用于垂直面的SAR测量。
因此,控制和计算设备14可以在存储设备15中建立轮廓的高分辨率的部分区段的数据库,并且随后由该数据库利用相应的重建算法组成测量对象3的完整的虚拟模型VM,在此,因此是更复杂的塑料型材,然后由此确定层厚度。
图4示出了对另一测量对象3的相应测量,该测量对象在此尤其具有不规则成形的密封唇口16。其不规则的边界面8可以相应地通过MIMO-SAR调节和信号检测首先模拟并且然后在模型中被测量。因此,尤其可以确定密封唇口16的特定参数,例如在特定位置上确定的参考厚度d_ref,并且将其与目标值进行比较。
因此,尤其也可以根据图5调节挤出过程,其中不是调节到直接测量的厚度或壁厚,而是将这样确定的参考厚度d_ref考虑用于这样的调节,在该调节中控制和计算设备14将控制信号S3发送给挤出机18以用于构造塑料型材3,从而挤出机18根据控制信号S3调整挤出材料的供应,并且不是例如调整到直接在测量信号中确定的层厚度。
图6示出了根据本发明的一个实施方式的方法的流程图。根据步骤St1矩阵布置4被定位在测量位置MP1中,使得其光学主轴A,即中间的收发器5a的光轴A指向测量对象3,在此例如为塑料型材。然后根据步骤St2在测量位置MP1中进行第一测量,其中THz收发器5逐次地分别主动地输出THz发射束并且检测被动地反射的THz辐射11。
此外,根据步骤St3逐步地沿着调节方向m1或m2调节测量布置4,使得在不同的测量位置MP1、MP2、…中进行逐次的测量。在此,调节可通常与测量同时进行,其中,测量过程相对于调节速度相对快速地进行并且因此可基本上相应在测量位置上执行。然后重复步骤St2、St3的测量循环,直至存在仅由测量位置构成的测量信号S1。
然后根据步骤St4,通过SAR计算方法利用重建算法的来计算每个测量位置MP1,MP2,...的矩阵布置的测量信号S1,从而优选地首先组成虚拟模型的部分区域并且由此组成塑料型材3的完整的虚拟模型VM。然后根据步骤St5从该虚拟模型VM中确定边界面8并且由此确定壁厚d。
所确定的壁厚d,尤其是例如还有参考厚度d_ref,可以在必要时用于控制挤出机18。
当测量对象3的调节速度小于矩阵布置4的调节速度m1、m2时,同样可以在测量期间对测量对象3进行调节。因为矩阵布置4具有二维的延伸,所以其不仅在图1-4的图平面中而且在测量对象3的输送轴或对称轴的方向上延伸,从而总是检测到足够长的型材条。因此,在制造期间连续测量挤出产品是可以的。
附图标记
1 测量布置
2 测量系统
3 测量对象,例如塑料型材
4 天线布置,尤其是天线矩阵
5 THz收发器
5a 中间的THz收发器
6 THz发射束
7 辐射锥、发射锥
8 边界面
9 塑料型材3的腔室
10 壁、腹板
11 反射的THz辐射
12 调节装置
14 控制和计算设备
16 密封唇口
18 挤出机
A 光轴,例如中间收发器5a的光轴
B 对称轴,测量对象3的输送方向
S1 测量信号
S2 调节装置12处的调整信号
S3 用于控制挤出机18的控制信号
MP1,MP2… 测量位置
VM 虚拟模型
a 收发器5之间的距离
b 层厚度
d_ref 密封唇口16的参考厚度
m1,m2 调节方向
β 反射角