在线辨识增程器系统同步电机旋变器电角度的系统及方法
文献发布时间:2023-06-19 12:14:58
技术领域
本发明是关于发动机的测量电变量领域,特别是关于一种在线辨识增程器系统同步电机旋变器(旋转变压器)电角度的系统及方法。
背景技术
车用同步电机的旋转变压器(以下简称:旋变),在进行电路分析,会判断旋变定转子的相对位置,从而实现车用电机精确的扭矩控制。但是由于电机在制造过程中的安装误差,电机定转子与旋变定转子的相对位置并不是完全一致的,而是存在一个固定的角度偏差,这种情况下就需要做初始角标定,将这个偏差测试出来并写入控制器。角度校正的时候,一般要求输出端不带负载,即没有力矩。
现有方案中,如果已经将增程器电机装上发动机,那么只能将电机拆下,再进行角度偏差校正。如果不将电机拆下就进行角度校正,由于发动机摩擦功、活塞位置、气门开闭的影响,电机输出端带有负载,激活电机控制器内部的角度校正程序是无法准确校正其角度的。
将电机拆下后,调整旋变一般只有2种方法。第1种方法是在产线上,使用旋变调零仪进行角度偏差校正;第2种方法是在电机台架上,激活电机控制器的角度校正功能,通入一定的d轴电流,使电机固定在准确的角度起始零位上,进行角度偏差校正。
现有方案中,需要将增程器电机与发动机分离,然后才能执行角度偏差校正。现有方案缺点:在增程器安装过程中,如果出现了位置偏差,无法准确的在线(在线:不将电机与发动机分离)辨识电机旋变角度偏差,需要将电机拆下后才能完成校正。
公开于该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
发明内容
本发明的目的在于提供一种在线辨识增程器系统同步电机旋变器电角度的系统,其无需将增程器电机与发动机分离,使用电机控制器内部特定的参数(特殊的角度校正功能)即可以执行角度偏差校正。
本发明的另一目的在于提供一种在线辨识增程器系统同步电机旋变器电角度的方法,其可以省略现有方案中繁琐的装拆步骤和相关的工具准备。
为实现上述目的,本发明提供了一种在线辨识增程器系统同步电机旋变器电角度的系统,包括增程器电机、电机控制器、上位机以及车载电脑;增程器电机设置在发动机上;电机控制器通过高压线与增程器电机连接;上位机通过通讯线与电机控制器连接;以及车载电脑通过通讯线与发动机连接。
在一优选的实施方式中,上位机用于电机控制器的参数设定及参数观测;电机控制器用于增程器电机的控制;车载电脑用于发动机的全面控制。
为实现上述目的,本发明提供了一种在线辨识增程器系统同步电机旋变器电角度的方法,包括以下步骤:电机控制器的参数设定步骤:当发动机维持怠速时,发送工作使能指令给电机控制器,当电机控制器接受到工作使能指令后,既能对同步电机的d轴电流和q轴电流进行设置;以及电机参数的观测步骤:当设置d轴电流等于q轴电流等于零后,根据传感器反馈的d轴电流和q轴电流,以及当前的旋变角度偏差值,能够计算出相应的同步电机的d轴电压值。
在一优选的实施方式中,在线辨识增程器系统同步电机旋变器电角度的方法还包括:调整角度偏差步骤:在线调整旋变的角度,直到观测的同步电机的d轴电压为零或接近零为止,即为完成角度校正;以及验证角度步骤:仍然设置d轴电流等于q轴电流等于零,激活发动机的TSC功能,将发动机运行在最高工作转速,观测电机控制器反馈出来的d轴电压是否为零,如果为零则校验完毕。
在一优选的实施方式中,在电机控制器的参数设定步骤之前还包括调试前的准备步骤:将增程器系统上高压,同时启动发动机并将发动机维持在怠速状态。
与现有技术相比,本发明的在线辨识增程器系统同步电机旋变器电角度的系统及方法具有以下有益效果:电角度校正过程中不需要拆卸增程器系统,不需要借助额外的仪器;相比拆卸增程器系统进行校正,本提案不需要拆卸,即节省了电机工装、电机台架进行测试(一般而言,增程器电机需要特制的工装)校正的精度高:克服了增程器电机输出端时刻带有负载、无法使用传统的旋变角度校正方法进行校正的问题;由“通入d轴电流”变为“观测d轴电压”,克服了增程器系统中电机输出端带有负载,一定的d轴电流所产生的力矩,无法使电机达到准确的零位的问题;校正方法简单、容易实现:不需要拆卸电机、不需要借助额外的工具,即可完成校正,且所控制和观测的物理量,均为同步电机控制中的必须量,无需进行额外的计算。
附图说明
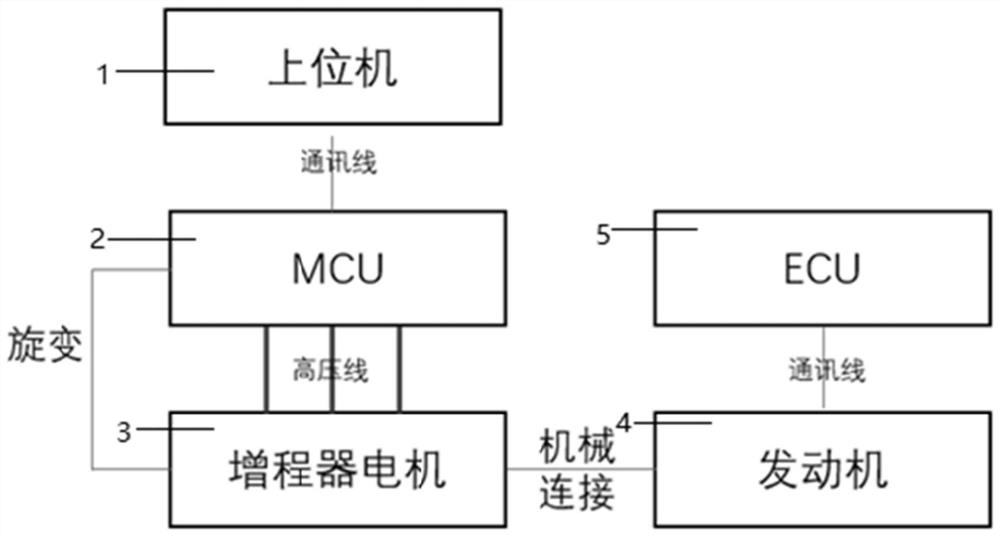
图1是根据本发明一实施方式的辨识系统的结构布置示意图;
图2是根据本发明一实施方式的辨识方法的流程示意图。
主要附图标记说明:
1-上位机,2-电机控制器,3-增程器电机,4-发动机,5-车载电脑,Id-同步电机的d轴电流,Iq-同步电机的q轴电流,Ud-同步电机的d轴电压。
具体实施方式
下面结合附图,对本发明的具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
除非另有其它明确表示,否则在整个说明书和权利要求书中,术语“包括”或其变换如“包含”或“包括有”等等将被理解为包括所陈述的元件或组成部分,而并未排除其它元件或其它组成部分。
如图1所示,根据本发明优选实施方式的一种在线辨识增程器系统同步电机旋变器电角度的系统,其主要包括上位机1、电机控制器2(MCU(Microcontroller Unit))、增程器电机3以及车载电脑5(ECU(Electronic Control Unit))等。增程器电机3设置在发动机4上。电机控制器2通过高压线与增程器电机3连接。上位机1通过通讯线与电机控制器2连接。以及车载电脑5通过通讯线与发动机4连接。
在一些实施方式中,上位机1用于电机控制器2的参数设定及参数观测。电机控制器2用于增程器电机3的控制。车载电脑5用于发动机4的全面控制。
为实现上述目的,本发明还提供了一种在线辨识增程器系统同步电机旋变器电角度的方法,包括以下步骤:
调试前的准备步骤:将增程器系统上高压,同时启动发动机4并将发动机4维持在怠速状态。
电机控制器2的参数设定步骤:当发动机4维持怠速时,发送工作使能指令给电机控制器2,当电机控制器2接受到工作使能指令后,既能对同步电机的d轴电流Id和q轴电流Iq进行设置。
电机参数的观测步骤:当设置d轴电流Id等于q轴电流Iq等于零后,根据传感器反馈的d轴电流Id和q轴电流Iq,以及当前的旋变角度偏差值,能够计算出相应的同步电机的d轴电压Ud值。以及
调整角度偏差步骤:在线调整旋变的角度,直到观测的同步电机的d轴电压Ud为零或接近零为止,即为完成角度校正;以及验证角度步骤:仍然设置d轴电流Id等于q轴电流Iq等于零,激活发动机4的TSC功能,将发动机4运行在最高工作转速,观测电机控制器2反馈出来的d轴电压Ud是否为零,如果为零则校验完毕。
以上步骤中的设置量即观测量:Id、Iq、Ud,均为同步电机控制中必不可少的量,任一稳定的同步电机控制系统中都可以进行设置及观测。
综上所述,本发明的在线辨识增程器系统同步电机旋变器电角度的系统及方法具有以下优点:电角度校正过程中不需要拆卸增程器系统,不需要借助额外的仪器;相比拆卸增程器系统进行校正,本提案不需要拆卸,即节省了电机工装、电机台架进行测试(一般而言,增程器电机需要特制的工装)校正的精度高:克服了增程器电机输出端时刻带有负载、无法使用传统的旋变角度校正方法进行校正的问题;由“通入d轴电流”变为“观测d轴电压”,克服了增程器系统中电机输出端带有负载,一定的d轴电流所产生的力矩,无法使电机达到准确的零位的问题;校正方法简单、容易实现:不需要拆卸电机、不需要借助额外的工具,即可完成校正,且所控制和观测的物理量,均为同步电机控制中的必须量,无需进行额外的计算。
前述对本发明的具体示例性实施方案的描述是为了说明和例证的目的。这些描述并非想将本发明限定为所公开的精确形式,并且很显然,根据上述教导,可以进行很多改变和变化。对示例性实施例进行选择和描述的目的在于解释本发明的特定原理及其实际应用,从而使得本领域的技术人员能够实现并利用本发明的各种不同的示例性实施方案以及各种不同的选择和改变。本发明的范围意在由权利要求书及其等同形式所限定。
- 在线辨识增程器系统同步电机旋变器电角度的系统及方法
- 永磁同步电机的电角度旋向和初始值辨识方法及系统