食物加工系统
文献发布时间:2023-06-19 12:16:29
背景技术
本申请涉及食物加工机,且更确切地说,涉及个别服务搅拌系统。
例如搅拌器的食物加工机常用于加工多种不同食物产品,包括液体、固体、半固体、胶体等。众所周知,搅拌器是用于广泛多种商业场合中对食物产品进行混合、切割以及切丁的有用装置,包括家庭厨房用途、专业餐厅或食物服务用途和大规模工业用途。它们方便地替代了手动切碎或切丁,并且通常具有一系列操作设置和模式,所述操作设置和模式适于例如针对特定食物产品提供特定类型或量的食物加工。
食物加工机涵盖手持式装置和独立装置。大型独立装置占用大量的操作台空间,使其难以存放。此类装置通常还设计成与大的部分一起使用。手持式搅拌器更适合个人化部分,但可能缺乏完全搅拌食物产品所需的功率。提供大型独立装置的功率且非常适合个人化部分的小型独立搅拌装置需要底座,所述底座容纳足够功率的电机以提供所需的搅拌性能。包括此类电机会导致个人化搅拌器的高度使得它们难以存放在橱柜下或具有占用过多操作台空间的占据面积。因此,仍然需要具有小占据面积和低轮廓,且仍提供足够的功率来完全搅拌食物产品的个人化搅拌器系统。
另外,已确定导致较小粒径的食物加工操作对于用户而言通常更令人愉悦。可以通过调整食物加工机的若干特征,包括通过增大加工工具的转速来实现更小的粒径。因此,需要在负载下实现加工工具的增大的转速,例如在不改变加工罐或加工工具的配置的情况下。
发明内容
根据一实施例,一种食物加工系统的食物加工底座包括:壳体,其具有用于接收包括加工组件的附件的安装区域;以及电动单元,其布置在所述壳体内。所述电动单元可用以使所述食物加工组件围绕旋转轴线旋转。所述电动单元包括大于3:1的直径与高度比。
除了上文所描述的特征中的一个或多个特征之外,或作为替代方案,在其它实施例中,所述直径与所述高度比等于或大于10:1。
除了上文所描述的特征中的一个或多个特征之外,或作为替代方案,在其它实施例中,所述电动单元包括具有至少一个定子叠片的定子组件,其中所述直径与所述高度比是所述至少一个定子叠片的所述直径与所述至少一个定子叠片的所述高度之比。
除了上文所描述的特征中的一个或多个特征之外,或作为替代方案,在其它实施例中,所述至少一个定子叠片包括多个定子臂,并且所述定子组件包括多个定子磁极,所述多个定子磁极中的每一个定子磁极包括缠绕在所述多个定子臂中的至少一个上的定子线圈。
除了上文所描述的特征中的一个或多个特征之外,或作为替代方案,在其它实施例中,包括驱动联接器,所述驱动联接器可用以在所述附件连接至所述壳体时接合所述食物加工组件。
除了上文所描述的特征中的一个或多个特征之外,或作为替代方案,在其它实施例中,包括传动装置,所述传动装置可操作地联接到所述电动单元的驱动轴和所述驱动联接器,其中所述传动装置的齿轮减速比大于3:1。
除了上文所描述的特征中的一个或多个特征之外,或作为替代方案,在其它实施例中,所述传动装置的齿轮减速比高达20:1。
除了上文所描述的特征中的一个或多个特征之外,或作为替代方案,在其它实施例中,所述食物加工底座的所述高度小于5英寸。
除了上文所描述的特征中的一个或多个特征之外,或作为替代方案,在其它实施例中,当无负载施加到所述电动单元时,所述电动单元可以5000rpm与约25000rpm之间的速度旋转。
除了上文所描述的特征中的一个或多个特征之外,或作为替代方案,在其它实施例中,当负载施加到所述电动单元时,所述电动单元可以5000rpm与约13000rpm之间的速度旋转。
根据另一实施例,一种食物加工系统的食物加工底座包括壳体,所述壳体具有用于接收附件的安装区域,所述附件包括食物加工组件和布置在所述壳体内的电动单元。所述电动单元可用以使所述食物加工组件围绕旋转轴线旋转。所述电动单元包括多个磁极,所述多个磁极包括多于两个磁极。
除了上文所描述的特征中的一个或多个特征之外,或作为替代方案,在其它实施例中,所述电动单元具有四个定子磁极。
除了上文所描述的特征中的一个或多个特征之外,或作为替代方案,在其它实施例中,所述电动单元进一步包括定子组件,所述定子组件包括与所述多个磁极相关联的多个独立定子线圈,所述定子组件进一步包括具有多个定子臂的至少一个定子叠片,其中所述多个定子线圈中的每一个定子线圈缠绕在所述多个定子臂中的至少一个上。
除了上文所描述的特征中的一个或多个特征之外,或作为替代方案,在其它实施例中,包括驱动联接器,所述驱动联接器可用以在所述附件连接至所述壳体时接合所述食物加工组件。
除了上文所描述的特征中的一个或多个特征之外,或作为替代方案,在其它实施例中,包括传动装置,所述传动装置可操作地联接到所述电动单元的驱动轴和所述驱动联接器,且所述传动装置的齿轮减速比大于3:1。
根据又一实施例,一种食物加工系统的食物加工底座包括:壳体,其具有用于接收包括食物加工组件的附件的安装区域;以及电动单元,其布置在所述壳体内。所述电动单元可用以使所述食物加工组件围绕旋转轴线旋转。所述电动单元包括转子组件,所述转子组件包括可围绕轴线旋转的驱动轴、附连到所述驱动轴的电枢,以及联接到所述驱动轴的轴承。所述轴承相对于所述驱动轴以与所述电枢重叠的布置安装。
除了上文所描述的特征中的一个或多个特征之外,或作为替代方案,在其它实施例中,所述轴承相对于所述驱动轴与所述电枢同心地安装。
除了上文所描述的特征中的一个或多个特征之外,或作为替代方案,在其它实施例中,所述电枢包括中空区,并且所述轴承布置在所述中空区内。
除了上文所描述的特征中的一个或多个特征之外,或作为替代方案,在其它实施例中,所述电动单元进一步包括定子组件,所述定子组件包括至少一个定子叠片,并且所述至少一个定子叠片的直径与所述至少一个定子叠片的高度之比大于3:1。
除了上文所描述的特征中的一个或多个特征之外,或作为替代方案,在其它实施例中,所述电动单元进一步包括定子组件,所述定子组件包括多个定子磁极,所述多个定子磁极包括多于两个定子磁极。
附图说明
并入于本说明书中并形成本说明书的一部分的附图体现本公开的若干方面,并且连同描述一起用以解释本公开的原理。在附图中:
图1是根据一实施例的食物加工系统的透视图;
图2是根据一实施例的图1的食物加工系统的底座的透视图;
图3是根据一实施例的与食物加工系统的底座兼容的附件的透视图;
图4是根据一实施例的包括另一附件的食物加工系统的透视图;
图5是根据一实施例的包括另一附件的食物加工系统的透视图;
图6A-6F是根据一实施例的各种可旋转刀片组件的透视图;
图7是根据一实施例的图5的附件的横截面图;
图8是根据一实施例的食物加工系统的控制系统的示意图;
图9是根据一实施例的食物加工系统的控制系统的示意图;
图10是根据一实施例的食物加工系统的电动单元的透视图;
图11是根据一实施例的食物加工系统的电动单元的另一透视图;
图12是根据一实施例的移除了风扇和安装托架的食物加工系统的电动单元的透视图;以及
图13是根据一实施例的食物加工系统的电动单元的一部分的横截面图;
图14是根据一实施例的食物加工系统的底座的透视图;
具体实施方式参考附图通过举例解释了本公开的实施例以及优势和特征。
具体实施方式
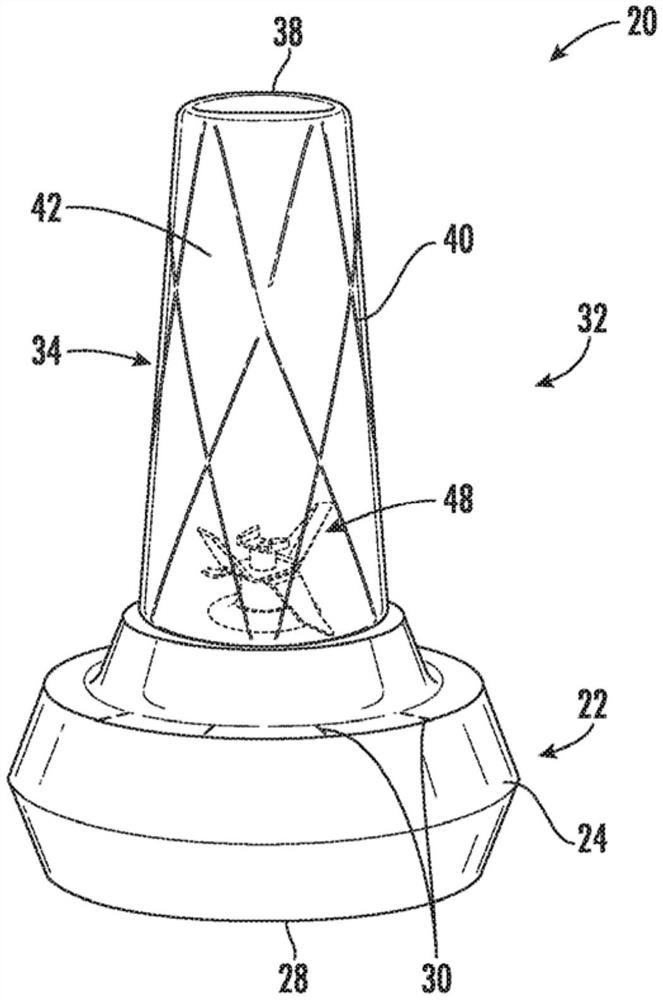
现参考图1和2,示出多功能食物加工系统20的示例。通常,食物加工系统20可适于执行任何食物加工或搅拌操作,作为非限制性示例,包括切丁、切碎、切割、切片、混合、搅拌、搅打、粉碎等等。尽管本文中示出和描述的食物加工系统是个人搅拌器系统,但其它食物加工系统也在本公开的范围内。
食物加工系统20包括具有主体或壳体24的食物加工底座22,驱动单元102和至少一个控制器104位于所述主体或壳体内(见图7和8)。驱动单元102包括例如由位于壳体24内的电动单元106(见图7和8)驱动的至少一个旋转部件,例如驱动联接器26(见图2)。底座22另外包括控制面板或用户界面28,其具有用于接通和断开电动单元106和用于选择各种操作模式的一个或多个输入30,所述操作模式例如震动(pulsing)、搅拌或连续食物加工。至少一个驱动联接器26被配置成接合联接到底座22的附件的一部分,用于加工位于附件内部的食物产品。这将在后续附图和论述中变得更加清楚。
大小和/或功能性不同的一个或多个附件可以被配置成与底座22一起使用。图1和3中示出适合与底座22一起使用的第一附件32的示例。如图所示,第一附件32包括倒置罐或容器34。容器34通常包括第一开放端36、第二封闭端38以及延伸于第一端36与第二端38之间的一个或多个侧壁40。侧壁40结合容器34的端36、38中的一个或多个端限定容器34的中空内部或加工室42。在一实施例中,容器34是“个人搅拌容器”或“杯”,其在与底座22分离时具有第一配置且在联接到底座22时具有第二倒置配置。在此类实施例中,附件32进一步包括加工配件44,所述加工配件被配置成以可移除方式联接到容器34的第一开放端36以密封加工室42。在所示的非限制性实施例中,加工配件44包括主体46,所述主体具有从其延伸的可旋转加工组件48。当加工配件44连接到容器34时,可旋转加工组件48安置于容器34的加工室42内。容器34和加工配件44可以可螺接方式联接到一起;然而,应理解,本文还涵盖例如卡口连接或夹等用于以可移除方式连接容器34和加工配件44的其它机构。
图4和5中示出可适合与底座22一起使用的另一附件50的示例。如图所示,附件50类似地包括具有第一开放端54、第二封闭端56和在第一端54与第二端56之间延伸以界定容器34的中空加工室60的一个或多个侧壁58的容器52。在一实施例中,容器52是“食物加工碗”,且可设定大小以容纳大约40液量盎司(图4)。或者,容器52可以是容量大于食物加工碗的“大罐”,所述容量例如大约72液量盎司(图5)。然而,容器52具有较大或较小容量的实施例也在本公开的范围内。
安置于加工室60内的可旋转加工组件48可以与容器52的第二端56一体地形成,或者可以可移除方式联接到所述第二端。可旋转加工组件48可以具有与图3的实施例的可旋转加工组件48大体上类似的配置,或替代地,可以具有不同的配置。附件50可另外包括配件,例如盖64,其被配置成联接到容器52的第一开放端54以密封加工室60。图4和5的附件的第二密封端56被配置成安装到底座22以执行食物加工操作。因此,当附件50连接到底座22时并且在附件50与底座22分离时,容器52的定向保持大体上恒定。
适合与食物加工系统20的一个或多个附件一起使用的各种可旋转加工组件48的示例,如图6A-6E所示。这些包括包括沿着旋转轴线堆叠的六个刀片(3对)的可旋转加工组件(图6A)、包括沿着旋转轴线堆叠的四个刀片(2对)的可旋转加工组件(图6B)、包括一对向下倾斜的刀片、一对向上倾斜的刀片和一对竖直延伸的粉碎刀片的可旋转加工组件(图6C)、包括轮廓设计成专门用于制备膏团的两个刀片的可旋转加工组件(图6D)、包括沿着旋转轴线堆叠且轮廓设计成专门用于制备膏团的四个刀片(2对)的可旋转加工组件(图6E),和包括用于执行切片操作的至少一个刀片的盘(图6F)。应理解,本文中所说明的可旋转加工组件48仅旨在作为示例,且任何合适的加工组件在本公开的范围内。
再次参考图2,在所示的非限制性实施例中,底座22包括大体上平坦的上表面70,并且联接壁72从上表面70向上延伸。联接壁72可以从上表面70垂直延伸(图14),或者可以非垂直角度从上表面70延伸(图2)。例如,如图所示,联接壁72具有大体上截头圆锥形配置。在所示的非限制性实施例中,联接壁72大体上平行于壳体24的与上表面70的外周边成角度向下延伸的部分(例如侧壁74)而定向。
在各种附件中的每一个中,可旋转加工组件48被配置成联接到食物加工系统20的底座22。与可旋转加工组件48的一个或多个刀片相关联的从动联接器76(见图7)定位在可旋转加工组件48的外表面处。因此,当附件(例如附件32或附件50)附接到底座22时,从动联接器可接收在由联接壁72限定的中空内部77内。所述至少一个驱动联接器26被配置成接合从动联接器76以使可旋转加工组件48围绕轴线X旋转,以加工位于附件32、50的加工室42、60内的食物产品。
在一些实施例中,例如当可旋转加工组件48是被配置成用于与例如倒置容器34一起使用的加工配件44的一部分时,加工配件44和/或容器34的第一端36也可接收在联接壁的中空内部内。或者,附件32、50可以与联接壁72以重叠布置定位(见图4和5)。在图7中最佳示出的实施例中,容器52的至少一个侧壁58延伸超出容器52的第二端56,以在其间限定联接室78。如图所示,可旋转加工组件48的从动联接器76设置在联接室78内。在此类实施例中,当将容器52连接到底座22时,联接壁72可接收在容器52的联接室78内。在一实施例中,联接室78处的侧壁58的延伸部分59的配置(例如角度和/或长度)与联接壁72互补,使得联接壁72的朝外的表面81直接接触侧壁58的延伸部分59的内部表面83。应理解,适合与底座22一起使用的任何附件,无论附件的配置如何,都可以接收在联接壁72的内部77内,或者与联接壁72重叠布置。
在图3中最佳示出的实施例中,例如附件32的附件可包括一个或多个接触构件80。然而,应理解,例如附件50的任何附件可包括一个或多个接触构件。如图中所示,接触构件可以是围绕附件32的周边定位的突片或另一突起。尽管图3的实施例包括四个接触构件80,但应理解,具有任何数目个接触构件80的附件在本公开的范围内。另外,尽管接触构件80被示为位于加工配件44的主体46处,但应理解,一个或多个接触构件80替代地或另外从容器34延伸的实施例也在本公开的范围内。
附件32的接触构件80可被配置成与底座22的安装区域协作以将附件32联接到底座22。在所示非限制性实施例中,联接壁72可形成底座22的安装区域。然而,本文还涵盖其中安装区域布置在底座的另一部分处的实施例,例如布置在底座22的上表面70中或在内部77内。安装区域可包括一个或多个接收槽84,附件32的多个接触构件80中的每一个可接收在所述接收槽内(见图14)。附件32可被配置成以可滑动方式连接到食物加工系统20的底座22。替代地或另外,附件32可被配置成可旋转地连接到底座22。例如,附件可被配置成在附件32、50与底座22可分离的配置与附件32、50相对于底座22锁定的配置之间旋转大约30度,例如在系统操作期间。然而,应理解,用于将附件32、50联接到底座22的任何合适的机构都在本公开的范围内。
在一实施例中,接触构件80与对应接收槽84之间的接合限定联锁,所述联锁可用以接合一个或多个微型开关以完成用于将电力递送到电动单元106的电路。替代地或另外,一个或多个传感器可以限定食物加工系统的联锁。在一实施例中,附件包括一个或多个磁体,且底座包括一个或多个簧片开关。在此类实施例中,除非每个簧片开关与对应磁体接合,否则电动单元无法操作。使用多个磁体和簧片开关可以允许附件在多个定向上连接到底座。此类联锁系统允许用户容易地接合附件和底座,而不需要突片或其它接触构件的小心对准。
现参考图8,更详细地示出食物加工系统20的控制系统100的示例。如图所示,控制系统100包括用户界面28,其邻近壳体24的一个或多个侧定位,或替代地定位在底座22的上表面70上。用户界面28包括一个或多个输入30,所述一个或多个输入与电动单元106通电相关联,并且用于选择食物加工系统20的各种操作模式。输入30中的一个或多个可包括灯或其它指示器以示出已选择相应输入。用户界面28可以另外包括与至少一个输入30分离且相关联的显示器108。然而,本文中还涵盖显示器108集成到至少一个输入30中的实施例。如图所示,食物加工系统20的控制系统100包括可操作地联接到用户界面28和驱动单元102的控制器或处理器104。控制器104被配置成响应于提供到用户界面28的一个或多个输入30而控制电动单元106的操作,且在一些实施例中,用于执行可旋转加工组件48的所存储的操作序列。
如图8中示意性所示,驱动单元102包括居中定位的驱动轴110,所述驱动轴可在至少一个方向上围绕轴线X旋转,并且在一些实施例中,可在第一方向和第二相反方向两者上旋转。驱动联接器26附连到驱动轴110的一部分,例如其一端。驱动轴110的旋转由电动单元控制,在106处示意性地示出。电动单元106可以直接联接到驱动联接器,使得驱动联接器以与驱动轴110相同的速度旋转,如图8中所示。或者,电动单元106可以例如经由例如齿轮箱或传动装置112间接连接到驱动联接器26(参见图9),使得驱动轴110的转速可以但不必不同,例如大于或小于驱动联接器26的转速。在此类实施例中,驱动轴110的轴线可与驱动联接器26的轴线同轴。然而,本文还涵盖驱动轴110的轴线以平行或成角度的配置从驱动联接器26的轴线偏移的实施例。
现参考图10-13,更详细地示出食物加工系统20的电动单元106的示例。如图所示,电动单元106包括电机,所述电机具有刚性地安装在底座22内的定子组件120以及被配置成围绕旋转轴线旋转的转子组件122。定子组件120包括至少一个且在一些实施例中包括多个堆叠的定子叠片124。在包括多个定子叠片124的实施例中,定子叠片124可以胶合、结合或焊接在一起。一个或多个定子叠片124具有在大体垂直于转子组件122的旋转轴线R布置的平面内在定子叠片124的外周边的相对侧之间测量的直径。在一实施例中,定子叠片124的直径大于90mm,例如等于或大于约100mm、105mm、110mm、115mm或120mm。定子叠片124另外具有平行于转子组件122的旋转轴线R测量的高度。在一实施例中,定子叠片124的高度小于或等于约20mm,且在一些实施例中,小于或等于约18mm、15mm、14mm、13mm、12mm、11mm或10mm。因此,具有小于或等于约20mm的高度和大于或等于约100mm的直径的任何组合的定子叠片都在本公开范围内。另外,在一实施例中,定子叠片124的直径与高度比大于3:1。例如,定子叠片124的直径与高度比可以等于或大于3.5:1、4:1、5:1、6:1、7:1、8:1、9:1、10:1、11:1、12:1、15:1或20:1。在一实施例中,定子叠片124的直径与高度比可以是在3:1与250:1之间的任何值。
另外,每个定子叠片124包括多个向内延伸的定子臂126。尽管在非限制实施例中仅示出四个定子臂126,但应理解,具有任何数目个向内延伸的定子臂的定子组件120都在本公开的范围内。例如由铜或铝材料形成的导线可缠绕在一个或多个定子叠片124的定子臂126上,以形成线圈128,所述线圈产生被配置成与转子组件122相互作用的磁场。定子线圈128的各种配置是已知的。尽管多个定子线圈128被示为彼此大体上分离,但本领域技术人员将理解,可例如经由连续导线一体地形成定子线圈128。
如图所示,每个定子臂126和缠绕在定子臂126上的对应定子线圈128组合地限定定子组件120的一个磁极。尽管每个定子线圈128分别示为缠绕在单个定子臂126上,但应理解,在其它实施例中,定子线圈128可缠绕在多个定子臂126上。在所示非限制性实施例中,定子组件120包括四个磁极。因此,导线可以缠绕在至少一个定子叠片124的定子臂126上,以限定相邻磁极具有相反极性的四个不同磁极。如图所示,磁极可以但不需要具有基本上相同的配置和/或围绕定子等距间隔。然而,应理解,本文中还涵盖定子组件120具有任何数目个磁极的实施例。例如,定子组件120可以配置有三个磁极、四个磁极、五个磁极、六个磁极、七个磁极或八个磁极中的任一个。
图12中最佳示出的转子组件122包括旋转地固定到中央驱动轴110的主电枢130。驱动轴110由由电动单元106的罩壳或壳体承载的一个或多个轴承132支撑。轴承132通常邻近驱动轴110的端部安装,相对于驱动轴110的轴线R与主电枢130成堆叠配置。然而,如图13中最佳示出,在一实施例中,轴承132可以与主电枢130的一部分同心地安装。如图所示,主电枢130可以设计成具有中空区134,电机壳体136和轴承132的一部分可安装在所述中空区内。通过以重叠布置安装轴承132,并且具体地同心地安装在主电枢130内,可以减小转子组件122的总高度。
另外,在所示的非限制性实施例(图12中最佳示出)中,主电枢130包括电枢核心138,其具有径向向外延伸的多个齿140,使得槽142形成于邻近齿140之间并且平行于旋转轴线R延伸。多个齿140可以围绕电枢核心138的周边等距地定位。电动单元106可以是绕线磁极式电机(wound field motor),使得主电枢130另外包括缠绕在主电枢130的齿140上的多个绕组(未示出)。绕组的端部被配置成在附连到驱动轴110的一部分的换向器144处终止。如所属领域中已知的,定子组件120的绕组或线圈128和转子组件122的绕组可连接以形成串激电机(定子绕组和转子绕组串联布置)、并励电机(定子绕组和转子绕组并联布置)或复激电机。一个或多个电刷146布置成与换向器144的表面接触。电刷146被配置成经由换向器144将转子绕组连接到电力源。尽管所示非限制性实施例包括四个电刷146,但应理解,具有任何合适数目个电刷146的电动单元106在本公开的范围内。操作电动单元106所需的功率可以在约600W与2kW之间。
另外,尽管本文将电动单元106说明和描述为有刷直流电机,但应理解,其它类型的电机也在本公开的范围内。例如,本文还涵盖定子组件120或转子组件122包括多个永磁体代替缠绕线圈的实施例。在此类实施例中,电动单元106可能不需要本文公开的换向器144和电刷146。在一实施例中,当负载未施加到电动单元106时,电动单元106的驱动轴110可以约5000rpm至25000rpm之间的速度旋转,并且当负载施加到电动单元106(例如施加到加工组件48)时,驱动轴110可以约5000rpm至13000rpm之间的速度旋转。
继续参考图10-13,电动单元106可另外包括风扇或叶轮148,所述风扇或叶轮可用以移动空气通过壳体24以冷却电动单元106。风扇148可以是轴流式风扇、径流式风扇或具有另一合适配置的风扇。在所示的非限制性实施例中,风扇148可操作地联接到驱动轴110。如图所示,风扇148可以连接到驱动轴110的一端150,使得由转子组件122驱动的驱动轴110的旋转引起风扇148围绕旋转轴线R的类似旋转。风扇148可包括被配置成引导空气径向向外流过定子组件120和转子组件122的多个叶片152。另外,至少一个安装托架154可用于将电动单元106安装在底座22内。如图所示,安装托架154可以具有开口158(驱动轴110延伸穿过所述开口)的中心部分156,并且包括从中心部分156向外延伸的多个臂160,所述多个臂被配置成例如在相邻定子线圈128之间的位置处连接到定子组件120。然而,具有任何合适配置的安装托架154在本公开的范围内。另外,尽管安装托架154示出为邻近定子组件120与风扇148相对的侧设置,但安装托架154和风扇148位于定子组件120的相同侧的实施例也在本公开的范围内。
应理解,风扇148远离驱动轴110定位的实施例也在本公开的范围内。在此类实施例中,风扇148独立于电机的驱动轴110驱动。通过将风扇148在底座22内定位在电机的外侧,可以减小食物加工底座22的总高度。另外,由于风扇148不由驱动轴110驱动,所以风扇能够产生气流以用于冷却电机,甚至在驱动轴110以低转速(例如小于约1300rpm)操作也是这样,例如在切碎或膏团应用期间。
现有的食物加工器械通常使用具有两磁极配置的电动单元(所述两个磁极指代定子组件120的磁极的总数目)。通过使用具有四磁极配置的电动单元106,当以相同速度操作时,电动单元106可以产生比具有两磁极配置的电机更大的扭矩。因此,具有四磁极配置的电动单元106可以比现有两磁极电机慢的速度操作以产生相同的扭矩输出。
电机在食物加工操作期间的转速可以被配置成基于食物加工系统20的一个或多个参数而变化。此类参数包括但不限于正在执行的食物加工操作、附连到底座22的附件32、50,以及由电动单元106驱动的可旋转加工组件48。例如,当连接到底座的附件是个人搅拌容器和大罐中的一个,并且可旋转加工组件48是高速底部刀片时,如图1-5和6C中所示,由电动单元106直接驱动的加工工具的最大转速可以是大约20,000rpm,并且加工工具的最小转速可以是大约5,000rpm。在一实施例中,加工工具的实际转速将在约10,000rpm与约14,000rpm之间。本文中所描述的每个加工工具的最大转速、最小转速和实际转速表示当附件被填充时的速度,也称为“在水负载下”。
类似地,当连接到底座的附件是罐,并且可旋转加工组件48具有6刀片堆叠配置(图6A)或4刀片堆叠配置(图6B)时,由电动单元106直接驱动的加工工具的最大转速可以是大约10,000rpm,并且加工工具的最小转速可以是大约2,000rpm。在一实施例中,6刀片堆叠加工组件或4刀片堆叠加工组件的实际转速将在约5,000rpm与约7,000rpm之间。另外,当连接到底座的附件是大罐时,6刀片堆叠加工工具的最大转速,无论是由电动单元106直接驱动还是经由传动装置间接地驱动,可为大约3,000rpm,且加工组件的最小转速可为约1,000rpm。在一实施例中,6刀片堆叠加工组件的实际转速将为约1,500rpm。对于包括大罐和4刀片堆叠加工工具的配置,加工工具的最大转速可以是大约4,000rpm,且加工工具的最小转速可以是大约1,000rpm。在一实施例中,4刀片堆叠加工工具的实际操作速度在约1,500rpm与3,000rpm之间。
在其中连接到底座22的附件是食物加工碗且加工组件48是2刀片膏团工具、4刀片膏团工具和切片盘中的一个的实施例中,加工组件48的最大转速,无论由电动单元106直接或间接驱动,可为大约4,000rpm,且加工组件48的最小转速可为约1,000rpm。在一实施例中,当容器时,加工组件48的实际转速将在约1,500rpm与约3,000rpm之间。
通过在食物加工装置内使用如本文所述的电动单元,可以大大减小食物加工装置的总高度,由此减小例如食物加工系统占据的工作台面上方的空间的总量。在一实施例中,底座22的总高度限定为底座的上表面70与底座22的与例如工作台面的支撑表面接触的底表面之间的竖直距离。然而,在其它实施例中,总高度可以是在联接壁72的上端与底座22的与例如工作台面的支撑表面接触的底表面之间延伸的距离。食物加工系统20的底座22的总高度可以小于或等于约5英寸、小于或等于4.5英寸(例如在4英寸与4.5英寸之间)、小于或等于约4英寸、小于或等于3.5英寸(例如在3英寸与3.5英寸之间)、小于或等于约3英寸,并且在一些实施例中,小于或等于约2英寸。在一实施例中,底座22的总高度为约4.2英寸,且在另一实施例中,底座22的总高度为约3.3英寸。另外,通过使用具有多于两个磁极的电机,由电机产生的扭矩等于或甚至大于具有两磁极电机的现有食物加工系统的扭矩。
本文中所引用的所有参考文献,包括公开案、专利申请和专利,特此以引用的方式并入本文中,其引用程度就如同每一参考文献单独地并且专门指示为以引用的方式并入并在本文中整体阐述一般。
除非本文中另外指明或与上下文明显相矛盾,否则在描述本公开的上下文中(尤其在所附权利要求书的上下文中)使用术语“一”和“所述”以及类似指示物应解释为涵盖单数和复数。除非另有说明,否则术语“包括(comprising)”、“具有”、“包括(including)”和“含有”应理解为开放式术语(即,意指“包括但不限于”)。除非在本文中另外指示,否则本文中对值的范围的引述仅在于充当个别地参考属于所述范围的每个单独值的速记方法,并且每个单独值并入本说明书中,如同在本文中个别地引述一般。除非在本文中另有指示或另外明显与上下文相矛盾,否则本文所描述的所有方法可按任何适合的次序执行。除非另外声明,否则本文提供的任何和所有示例或示范性语言(例如,“例如”)的使用仅在于更好地说明本公开,而不对本公开的范围构成限制。本说明书中的任何语言都不应理解为指示任何未请求保护的要素对于实践本公开是必需的。
本文中描述本公开的示范性实施例,包括本发明人已知的用于执行本公开的最佳模式。在阅读前面的描述后,这些实施例的变化对于所属领域的技术人员而言将变得显而易见。本发明人期望所属领域的技术人员在适当时使用此类变化,并且本发明人预期本公开以与本文具体描述的方式不同的方式来实践。因此,本公开包括适用法律所准许的随附权利要求书中所述的主题的所有修改和等同物。此外,除非本文另外指示或另外明显与上下文相矛盾,否则本公开涵盖上文所描述的要素以其所有可能变化形式的任何组合。
- 提高食物加工系统或设备中生产的食物产品膨胀的设备和方法
- 具有导流装置的食物加工系统