单舵轮AGV的运动控制方法和控制装置
文献发布时间:2023-06-19 12:18:04
技术领域
本专利涉及移动机器人领域,尤其用于单舵轮AGV的运动控制。
背景技术
移动机器人不受场地、物流通道和空间限制,可实现毫米级精确定位。因此,在工厂物流中,最能充分体现其柔性,实现高效、经济、灵活的无人化物料运输。移动机器人是联系和调节离散型物流系统以使其作业连续化的必要自动化搬运装卸手段,其应用范围和应用规模越来越大。但是现有技术中,对于单舵轮底盘模型,舵轮的控制量多采用几何方法计算,其引入移动机器人转弯半径变量存在不存在的情况(即移动机器人直线行走时),导致计算复杂,实际应用性不强。
发明内容
基于此,有必要针对上述问题,提出一种以舵轮和承重轮组成的三轮底盘结构,实现单舵轮AGV的运动控制。
一种单舵轮AGV的运动控制方法,所述单舵轮AGV包括一个驱动舵轮和两个随动轮,舵轮位于两个随动轮的中心线上;包括:
通过单舵轮AGV的运动速度和角速度,推导出AGV的舵轮速度;
通过单舵轮AGV的运动速度和角速度,推导出AGV的舵轮转角;
根据AGV的舵轮速度和转角,控制AGV的运动。
在其中一个实施例中,AGV的舵轮速度推导过程如下:
舵轮在水平面内速度正交分解为X向速度与Y向速度;
舵轮X向速度与AGV车体的速度相同,舵轮Y向速度等于随动轮中心到舵轮的直线长度与AGV角速度的乘积;
将X项与Y向的舵轮速度进行速度合成,得出舵轮的实际速度;
公式如下:
其中:V为AGV车体的速度,Vi为舵轮的速度,V
在其中一个实施例中,AGV的转角数值推导过程如下:
舵轮在水平面内的转角正切值是舵轮的Y向速度比X向速度;
转角的数值就是舵轮的Y向速度比X向速度的反正切数值;
公式如下:
其中:αtan2为带象限的反正切函数,θ为舵轮转角。
一种控制装置,采用单舵轮AGV的运动控制方法,包括速度计算模块和转角计算模块;速度计算模块通过运动学公式计算舵轮的线性速度;转角计算模块通过运动学公式计算舵轮的转角数值。
在其中一个实施例中,所述控制装置还包括后台运行模块,所述后台运行模块通过舵轮的速度与转角,控制AGV的前进、后退、转弯动作。
通过运用速度的合成与分解以及速度与角速度的关系,推导出单舵轮运动中心速度和角速度(输入量)与舵轮的速度和转向角(输出量)的计算关系。这样AGV可以简便、明了的得出施加在舵轮上的速度与转角。该方法简单、易用,适用于单舵轮AGV任何运动的输出量计算。运用该方法,不仅实现单舵轮AGV的前进、后退、转弯,还为单舵轮AGV的高精度控制提供理论基础。
附图说明
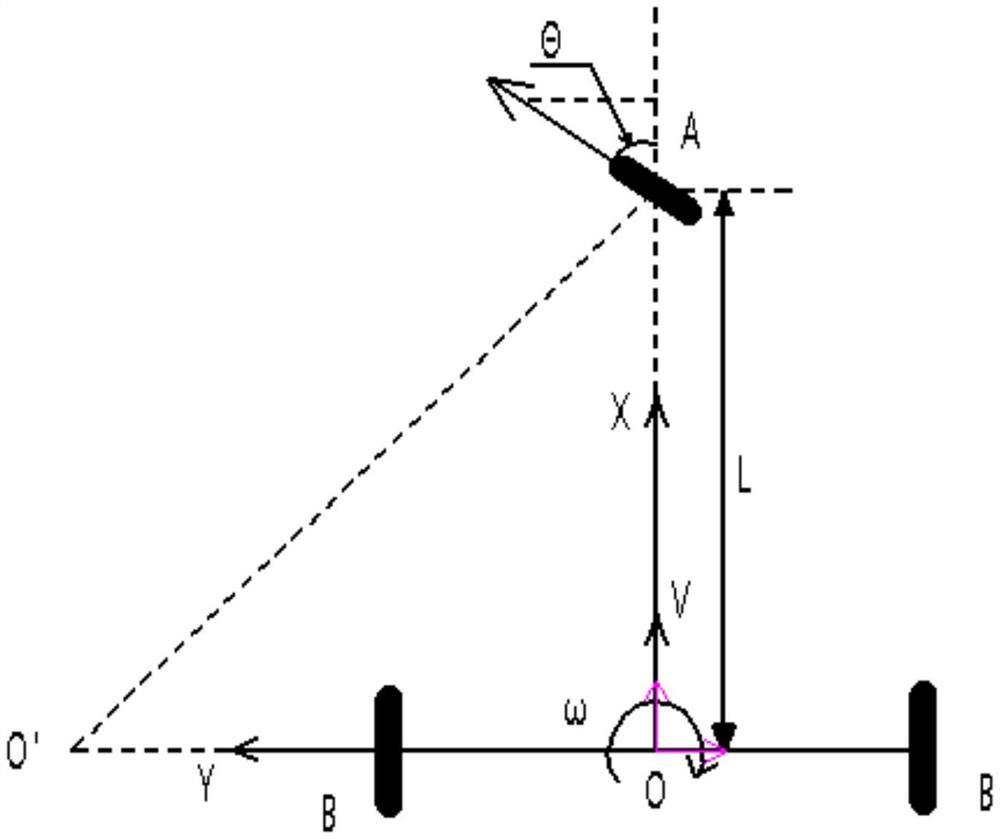
图1为本申请的速度分解与合成示意图;
具体实施方式
为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳实施方式。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本发明的公开内容理解的更加透彻全面。
需要说明的是,当元件被称为“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”、“顶部”、“底部”、“底端”、“顶端”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
一实施方式中,一种单舵轮AGV的运动控制方法,所述单舵轮AGV包括一个驱动舵轮和两个随动轮,舵轮位于两个随动轮的中心线上;步骤包括:通过单舵轮AGV的运动速度和角速度,推导出AGV的舵轮速度;通过单舵轮AGV的舵轮速度,推导AGV的舵轮转角数值;根据AGV的舵轮速度和转角数值,控制AGV的运动。
一种控制装置,采用单舵轮AGV的运动控制方法,包括速度计算模块和转角计算模块;速度计算模块通过运动学公式计算舵轮的线性速度;转角计算模块通过运动学公式计算舵轮的转角数值。
通过速度的分解与合成计算,可以很方便快捷的得到舵轮的速度与转角,进而控制AGV的行走。
下面结合具体实施例对所述单舵轮AGV的运动控制方法进行说明,以进一步理解所述单舵轮AGV的运动控制方法的构思。
参照附图1所示,单舵轮AGV是一个三轮运动的AGV小车,包括一个驱动舵轮A和两个随动轮B。其中,舵轮A位于两个随动轮B的中心线上。为了AGV小车的控制系统可以简单方便的得到舵轮的运行速度和转角,本申请采用倒推法,通过速度的分解与合成方式推导计算舵轮的速度和转角。
具体过程如下:参照附图1所示,设单舵轮AGV的旋转中心为点O,两随动轮B连线的中心为点O’,舵轮A到点O的距离为L,舵轮A与点O的连线设为X轴,两随动轮连线设为Y轴,舵轮A的运动速度为Vi,舵轮与车体坐标系的夹角为θ。根据速度分解公式,可将舵轮A的速度在X轴方向和Y轴方向进行正交分解,分解结果如下:
其中:Vix为舵轮A在X轴的速度,Viy为舵轮A在Y轴的速度。
进一步的,设单舵轮AGV的运动速度为V,角速度为ω,根据运动学原理,可求出舵轮A在X方向上的速度Vix和Y方向的速度Viy,公式如下:
由此可得出,舵轮的速度Vi。
将V
舵轮的转角计算如下:
tanθ=V
将V
其中:αtan2为带象限的反正不切函数(采用带象限的反正切函数不仅可以求出舵轮的转角数值,而且通过象限还可以确定舵轮的具体转向)。
通过上述推导及运算过程可知,如果想要AGV实现我们需要的速度和\或转向,只需将需要的数值代入上述公式进行推导,就可计算出舵轮的实际的速度和转角,进而就可以通过控制系统对舵轮提供驱动力和转向力,实现对AGV操作控制。
一实施例中,一种控制装置采用上述单舵轮AGV的运动控制方法,其包括速度计算模块和转角计算模块。速度计算模块通过运动学公式计算舵轮的线性速度并将信号或指令反馈给AGV的控制系统;转角计算模块通过运动学公式计算舵轮的转角并将信号或指令反馈给AGV的控制系统;控制系统根据反馈单的额信号或指令操作AGV的运动。如AGV前进、后退或转弯。
在一实施例中,一种控制装置还包括后台运行模块,后台运行模块通过推导计算的舵轮速度与转角,对AGV施加相应的驱动力和转向力,控制AGV的前进、后退、转弯动作。
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 单舵轮AGV的运动控制方法和控制装置
- 一种重载双舵轮AGV车体的运动控制方法、系统及装置