用于服务物体的方法和系统
文献发布时间:2023-06-19 12:19:35
版权声明
本专利文件的部分公开内容包括受版权保护的资料。版权所有人不反对任何人按照其在专利和商标局的专利文件或记录中的形式对本专利文件或专利公开内容进行复制,但在其他方面保留所有版权。
技术领域
本发明实施例涉及移动平台技术,更具体地但不唯一地,涉及用于物体服务的方法和系统。
背景技术
物体服务,比如表面检查,对于各种物体,比如客机、船和建筑的例行维护是十分重要的。例如,由于环境因素如:盐雾、沙尘、雷击和异物轰击的影响,客机的表面漆层容易受损。这种损坏会导致表面漆层脱落或开裂等缺陷。该缺陷可位于客机机身的任何位置。
传统地,缺陷检查主要依靠人类在梯子的辅助下近距离目视检查。人类目视检查通常需要跨越客机的整个机身。因此,该检查经常耗费大量的人力和时间。
鉴于上述情况,需要克服现有方法和系统的缺点的检测物体的方法和系统。
发明内容
本发明公开涉及一种用于服务物体的系统及其制作和使用方法。
根据本文公开的第一个方面,向所述物体的选择的服务点移动,其中,所述选择的服务点的位置的获取基于:所述选择的服务点和所述物体之间的空间关系,以及所述物体的位置和方向;维持所述移动平台和所述物体之间的距离;和在所述维持期间对所述物体执行任务。
根据本文公开的第二个方面,一种通过移动平台服务物体的方法,包括:维持所述移动平台和所述物体之间的距离,其中,基于所述移动平台的一个或多个操作条件确定和/或动态调整所述距离;和在所述维持期间对所述物体执行任务。
根据本文公开的第三个方面,一种通过移动平台服务物体的方法,包括:向所述物体的选择的服务点移动,其中,所述移动的路径为根据所述选择的服务点的位置确定;维持所述移动平台和所述物体之间的距离;和在所述维持期间对所述物体执行任务。
根据本文公开的第四个方面,提供一种用于服务物体的系统,包括:行程控制器,用于在移动平台上操作,并引导所述移动平台以根据如上所述的至少一个服务物体。
根据本文公开的第五个方面,提供一种用于服务物体的无人飞行器(UAV),包括:行程控制器,引导无人飞行器以根据如上所述的至少一个服务物体;和一个或多个螺旋桨,用于基于来自所述行程控制器的指令移动所述无人飞行器。
根据本文公开的第六个方面,提供一种储存了一个或多个程序的非暂时性计算机可读存储介质,所述一个或多个程序包括指令,当所述指令被行程控制器执行时,指示所述行程控制器根据如上所述的至少一个服务物体。
附图简要说明
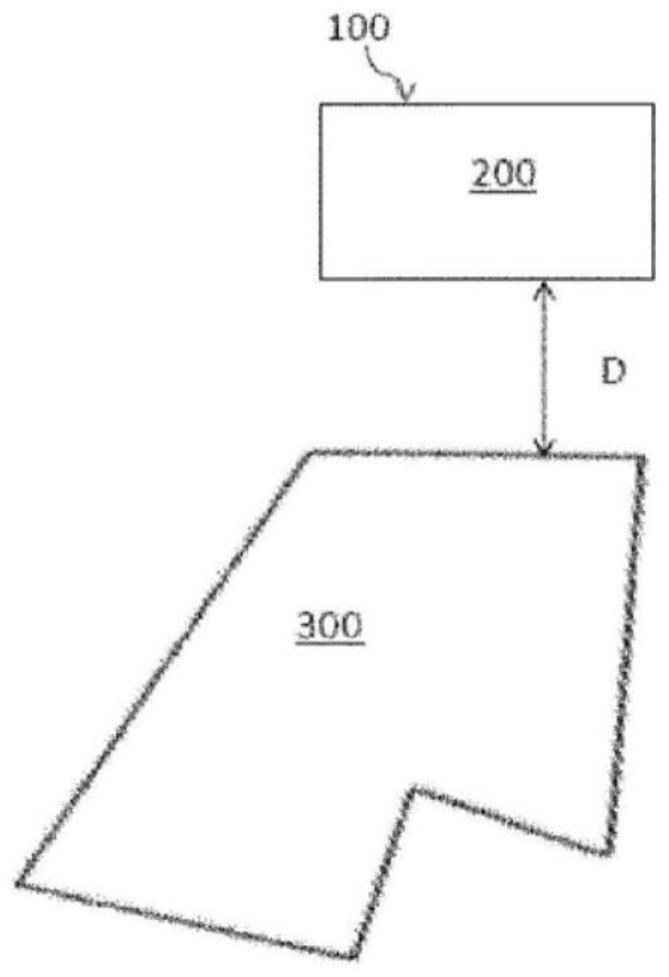
图1是示出了与物体相关地示出的移动平台的一个实施例的示例图。
图2是示出了安装在图1中的移动平台上的移动平台控制系统的一个实施例的示例图。
图3是示出了通过图1中的移动平台服务物体的方法的一个实施例的示例性顶层流程示意图。
图4是示出了图1中的移动平台的一个可替代实施例的示例图,其中移动平台从一个或多个方向监测与物体的距离。
图5是示出了图4中的移动平台的一个可替代实施例的示例图,其中移动平台包括超声波传感器和视觉传感器中的至少一种。
图6是示出了使用立体观测进行图4中的距离测量的示例图。
图7是示出了使用三角测量法进行图4中的距离测量的示例图。
图8是示出了使用超声波感测进行图4中的距离测量的示例图。
图9是示出了图5中的超声波传感器和视觉传感器的一个实施例的示例性细节图。
图10是示出了图4中的移动平台的另一个可替代实施例的示例性细节图,其中移动平台包括无人飞行器(UAV)。
图11是示出了基于视觉感测和超声波感测确定图4中的距离的示例性流程图。
图12是示出了图1中的移动平台的一个可替代实施例的示例图,其中移动平台向物体的选择的服务点移动。
图13是示出了通过改变图12中的物体的位置或方向来改变选择的服务点的位置的示例图。
图14是示出了通过控制点确定图12中的物体的位置的示例图。
图15是示出了通过一个或多个控制点确定图12中的物体的方向的示例图。
图16是示出了确定图12中的物体的位置和方向的示例性细节图,其中对物体的位置和方向进行二维确定。
图17是示出了确定图12中选择的服务点的位置的示例性流程图。
图18是示出了图12中的物体的示例图,其中移动平台提供有行进路径。
图19是示出了图1中的移动平台的另一个可替代实施例的示例图,其中移动平台包括差分全球定位系统(DGPS)模块。
图20是示出了图19中的移动平台的一个可替代实施例的示例性细节图,其中移动平台包括无人飞行器。
图21是示出了图1中的移动平台的一个可替代实施例的示例图,其中移动平台包括有效载荷。
图22是示出了图21中的移动平台的一个可替代实施例的示例性细节图,其中移动平台包括无人飞行器。
图23是示出了图1的移动平台的另一个可替代实施例的示例图,其中移动平台向计算机传输数据。
图24是示出了图3中的方法的一个可替代实施例的示例性流程图,其中移动平台捕捉物体的图像。
图25是示出了图1中的移动平台的另一个可替代实施例的示例图,其中移动平台与一个或多个其它移动平台合作操作。
图26是示出了用于服务图1中的物体的系统的一个实施例的示例图,其中系统包括与移动平台关联的终端装置。
图27是示出了图26中的终端装置的一个可替代实施例的示例图。
图28是示出了图26中的终端装置的另一个可替代实施例的示例图,其中终端装置与远程控制耦合。
图29是示出了使用图26中的终端装置操作移动平台的方法的一个实施例的示例性流程图。
图30是示出了图29中的方法的一个可替代实施例的示例性流程图,其中终端装置获取物体的模型。
应当注意,附图并未按照比例绘制,且出于说明性目的,所有图中结构或功能相似的元件一般使用相同的附图标记表示。同样应当注意的是,附图只是用来帮助描述优选实施例。附图并不是用来说明描述的实施例的所有方面并且也不限制本发明的范围。
本发明的详细描述
由于现有的方法和系统无法有效地自动检测物体,可以证明在检测物体和自动化检测过程中提高效率的方法和系统是需要的,且能够为广泛的应用提供基础。该应用可以包括检测飞机、轮船和建筑物。不必局限于检测,所述方法和系统可以用于任何涉及在物体的选择的位置上实施功能的工业作业。根据本文公开的实施例,如图1所示的系统100可以实现该结果。
系统100可以用于服务物体300。物体300可以包括任何有形状的结构。示例性结构可以包括飞机、轮船、航天飞机、建筑、桥梁、山、洞穴、隧道、运输管道、水体和/或类似物。形状可以是固定的和/或随时间变化的。物体300可以自行改变形状和/或可以由于外力改变形状,包括有人和/或无人参与。物体300可以是静止的和/或移动的。例如,物体300可以做旋转和/或平移的运动。
系统100可以服务物体300,例如,通过执行关于(和/或涉及)物体300的任务(和/或采取有关物体300的动作),包括任何有益于物体300的任务。示例性动作可以包括检测、修复、为物体300提供维护和/或获取物体300的数据。
图1示出了包括移动平台200的系统100。移动平台200的示例可以包括,但不限于,自行车、汽车、卡车、轮船、船只、火车、直升机、飞机及其各种混合等。在一些实施例中,移动平台200可以包括无人飞行器(UAV)。通俗地称为“无人机”,无人飞行器是机上没有人类飞行员(或操作员)的航空器,其飞行可被自动控制或由远程的飞行员控制(或有时两者皆有)。目前无人飞行器被发现越来越多地用于包括各种空中操作(例如数据收集或递送)的民用应用中。本发明的系统和方法适用于多种类型的无人飞行器,包括但不限于四旋翼机(也被称为四旋翼直升机或四旋翼),单旋翼、双旋翼、三旋翼、六旋翼和八旋翼的旋翼无人飞行器,固定翼无人飞行器和旋翼-固定翼混合无人飞行器。
如图1所示,移动平台200可以操作以维持与物体300的距离D。距离D可以指移动平台200和物体300之间的间距。距离D,例如,可以包括预定距离和/或预定距离范围。维持距离D的优点可以包括,例如,阻止移动平台200与物体300相撞。
尽管图1示出了一个距离D,但是移动平台200可以位于距离物体300的一个或多个相同和/或不同的距离D的位置处。
参见图2,示出了包括移动平台控制系统210的移动平台200。移动平台控制系统210可以包括一个或多个传感器230。移动平台控制系统210可以按需包括任何数量的传感器230——例如1,2,3,4,5,6个,或甚至更多个传感器230。传感器230可以以任何需要的方式设置在移动平台控制系统210上,传感器230的具体的设置取决于应用。传感器230可以有利地被轻量化并能够进行高频率数据收集以便于实时的物体距离检测和躲避碰撞。适用于移动平台控制系统210的示例性传感器230包括,但不限于,彩色或单色视觉传感器、光电传感器、热/红外传感器、飞行时间传感器、超声波传感器、多光谱成像传感器、分光光度计、分光计、温度计、照度计、麦克风/声波转换器等。
传感器230可以与一个或多个处理器240交互。处理器240可以作为用于引导移动平台200的部分或全部操作的行程控制器。当移动平台200包括无人飞行器时,处理器240可以作为飞行控制器。无限制地,每一个处理器240都可以包括一个或多个通用微处理器(例如:单核或多核处理器)、专用集成电路、专用指令集处理器、图形处理器、物理运算处理器、数字信号处理单元、协处理器、网络处理单元、音频处理单元、加密处理单元等。处理器240可以配置为执行本文描述的任何方法,包括但不限于关于物体距离检测和碰撞躲避的各种操作。在一些实施例中,处理器240可以包括用来处理关于物体距离检测和碰撞躲避的特定操作的专门的硬件——例如,处理超声波数据、处理视觉传感器数据、基于收集的数据确定距离D(图1中示出)和基于确定的距离D控制移动平台200。
在一些实施例中,处理器240可以位于在物理上接近传感器230的位置。在这种情况下,处理器240和传感器230可以配置为本地通信,例如,使用硬件连接器和总线。本地通信的优点在于可以减小传输延迟以便于实时的物体距离检测和碰撞躲避。
在其它实施例中,处理器240可以至少部分地远离传感器230。可以向远程处理器240传输传感器230获得的测量数据以用于处理。远程处理器240可以基于测量数据生成控制信号并将控制信号发送回移动平台200。各种无线通信方法可以用于传感器230和处理器240之间的远程通信。适当的通信方法包括,例如,无线电、无线保真(Wi-Fi)、蜂窝、卫星和广播。
如图2所示,移动平台控制系统100可以按需要包括一个或多个附加的硬件部件(未示出)。示例性附加的硬件部件包括,但不限于存储器250(例如:随机存取存储器(RAM),静态RAM,动态RAM,只读存储器(ROM),可编程ROM,可擦除可编程ROM,电可擦写可编程ROM,闪存,安全数字(SD)卡等),和/或一个或多个输入/输出接口(例如,通用串行总线(USB),数字视频接口(DVI),显示端口,串行ATA(SATA),IEEE1394接口(也称为火线)、串行、视频图形阵列(VGA),超级视频图形阵列(SVGA),小型计算机系统接口(SCSI),高清晰度多媒体接口(HDMI),音频端口,和/或专有输入/输出接口)。移动平台控制系统210也可以根据需要包括一个或多个输入/输出装置260(例如,按钮、键盘、小键盘、轨迹球、显示器和监视器)。
图2示出了移动平台200包括移动机构220。移动机构220可以包括一个或多个旋翼,螺旋桨,叶片,发动机,电动机,轮,轴,磁铁,喷嘴,动物,或人类。例如,移动平台200可以有一个或多个推进机构。在某些实施例中,移动平台200可以包括无人飞行器,并且无人飞行器可以包括一个或多个螺旋桨来产生推力,从而推进无人飞行器。
在一些实施例中,当被移动平台控制系统210和/或处理器240控制时,移动机构220可以允许移动平台200进行选择的移动。示例性移动包括从表面或地面起飞、在地面着陆、以选择的速度行进、向选择的目的地行进、在选择的位置和/或方向上悬停在空中,或其组合。
例如,移动机构220可以包括一个或多个电动机,每一个电动机驱动一个或多个螺旋桨。因此,螺旋桨可以向移动平台200提供升力和/或推力。每一个螺旋桨的旋转速度可以是各自独立地和/或共同地改变,以控制每一个螺旋桨产生的升力和/或推力,从而调整移动平台200的空间位置、速度和/或加速度。例如,可关于多达三个平移度和多达三个旋转度调整移动平台200的空间位置、速度和/或加速度。
图3是示出了通过移动平台200服务物体的方法1000的一个实施例的示例性顶层流程图。在步骤1100,维持与物体300的距离D。移动平台200可以维持与物体300的距离D。移动平台200可以维持与物体300的任意选择部分的距离D。例如,移动平台200可以维持与物体300的表面的距离D。表面可以指选择的表面区域和/或物体300的整个表面。
为了维持距离D,移动平台控制系统210可以通过一个或多个传感器230监测距离D。当移动平台控制系统210(图2中示出)检测到距离D已经偏离了预定距离时,移动平台控制系统210可以控制移动机构220(图2中示出),以使移动平台200调整速度和/或位置,从而在预定距离和/或预定距离范围内保持距离D。
如图3所示,在步骤1200,在维持期间对物体300执行任务。移动平台200可以在距离D的维持期间对物体300执行一个或多个任务。任务可以包括移动平台200在距离D可对物体执行的任何功能。在某些非限制性示例中,任务可以包括捕捉静止和/或视频图像,进行测量和/或涂布如涂料等物质。
为了维持距离D,在步骤1100,移动平台控制系统210可以基于传感器230的测量来确定距离D,并将距离D与预定距离进行比较。可以基于从各种各样的因素中选择的一个或多个因素确定预定距离。例如,在步骤1200,可以基于移动平台200执行的任务,和/或基于移动平台200的一个或多个操作条件确定和/或动态调整预定距离。
示例性操作条件可以包括移动平台200周围的环境条件。示例性环境条件可以包括风况。移动平台200周围的风可以使得移动平台200移动位置。当距离D太短时,因为移动平台200可能没有足够的时间和/或距离来调整运动以补偿非预期的位置移动,移动平台200可能很容易地在风力下与物体300发生碰撞。
附加地和/或可替代地,示例性操作条件可以包括控制系统的准确性和/或移动平台200的移动。例如,传感器230可以有一定的测量误差和/或容差。移动平台控制系统210和/或移动机构220也可有一定的误差。附加地和/或可替代地,用于测量移动平台200的位置任何位置追踪装置都可以有一定的测量误差。因此,距离D的实际值可能偏离距离D需要维持的预定值。当距离D太短时,移动平台200可能与物体300发生碰撞。因此,为了安全操作,移动平台200可以维持距离D以大于预定距离下限。例如,当移动平台200是无人飞行器时,示例性距离下限可以是至少60厘米。
附加地和/或可替代地,移动平台200可以维持距离D以最优地执行某一任务。例如,移动平台200可以维持距离D大于下限和/或小于上限,以在选择的视场大小和/或分辨率内捕捉物体的选择区域的图像。
因此,为了避免碰撞和/或成功地执行任务,移动平台200可以在预定距离范围内维持距离D。在某些实施例中,预定距离范围可以基于如移动平台200的操作条件的因素。也就是说,移动平台200和物体300之间维持的距离D可以基于移动平台200的操作条件。
移动平台200可以监测距离D,以调整移动来维持距离D。距离D可以包括一个或多个距离D1,D2,…,Dn。可以以相对于移动平台200相同和/或不同的方向测量距离。可以在移动平台200和物体300上的相同和/或不同位置之间测量距离。移动平台200在物体300上的不同位置维持的距离可以是相同的和/或不同的。在一个示例中,移动平台200至少可以部分地被物体300包围。因此,移动平台200可以以相对于移动平台200的一个或多个方向监测距离D。有利地,移动平台200可以在一个或多个方向躲避碰撞。
参见图4,物体300可以在相对于移动平台200的第一方向与移动平台200相距第一距离D1,且相对于移动平台200的第二方向与移动平台200相距第二距离D2。第一方向可以与第二方向相同和/或不同。移动平台200可以以任何适当的方式,包括依次地和/或同时地监测第一和第二距离D1、D2。
尽管图4示出了两个方向,但移动平台200可以在任意数量的方向上监测任意数量的距离D1、D2,且不受限制。尽管图4示出了移动平台200和物体300之间的距离D1、D2,但距离D1、D2可以是移动平台200和两个或更多的物体之间的。例如,障碍物(未示出)可以与物体300相邻。当监测与物体300的距离D1、D2时,移动平台200可以监测移动平台200和障碍物之间的距离,以避免与障碍物碰撞。
移动平台200可以以任何方式监测距离D。参见图5,例如,传感器230可以包括用于测量距离D的超声波传感器111和/或视觉传感器112。移动平台200可以通过超声波传感器111和/或视觉传感器112监测距离D。
尽管图5示出了传感器230包括超声波传感器231和/或视觉传感器232,但移动平台200可以包括任何附加的和/或可替代的用于测量距离D(图1中示出)的传感器230。例如,移动平台200可以包括飞行时间传感器。尽管图5示出了传感器230包括一个超声波传感器231,但传感器230可以包括多个相同的和/或不同的超声波传感器231。尽管图5示出了传感器230包括一个视觉传感器232,但传感器230可以包括多个相同的和/或不同的视觉传感器232。
尽管仅出于说明性目的示出了独立的器件,但是,移动平台控制系统210的两个或以上的传感器230可以部分或全部集成到单个器件,和/或共享一个或多个重叠的物理部件,如外壳、微芯片、光传感器、检测器、通信端口等。例如,在一些实施例中,超声波传感器231可以与视觉传感器232共享处理器240。在其它实施例中,传感器230可以是物理上分立的器件以便于更换和模块化。
视觉传感器232可以通过视觉感测确定距离D。视觉感测可以指通过分析感兴趣的物体的一个或多个图像来进行感测。示例性视觉感测方法可以包括立体观测(和/或立体视觉)。视觉传感器232可以包括两个或以上的成像装置,每一个成像装置均捕捉物体300上的感兴趣的点的图像。图像中感兴趣的点的位置的差异可以用于提供距离D。
参见图6,示出了视觉传感器232包括第一成像装置232a和第二成像装置232b。图6示出了参照两个成像装置232a、232b使用立体观测确定距离D的方法。每一个成像装置232a和232b都能感知物体300上的相同的感兴趣的特征点301,但以不同的空间坐标,如坐标轴(Xa,Ya,Za)和(Xb,Yb,Zb)所示。成像装置232a和232b分别沿各自的光轴2320a和2320b感知感兴趣的特征点301,从而得到感兴趣的特征点301的两个不同的二维图像2321a和2321b。二维图像2321a和2321b通常是不同的,从不同的位置获得的,除非成像装置232a和232b被定位为使它们的光轴2320a和2320b重合。相应地,在大多数情况下,可以在图像2321a和2321b之间找到双目差异d(如式(4)),如以下参照图7所描述。
参见图7,可以比较二维图像2321a和2321b以确定成对成像装置232a和232b(或等效地,视觉传感器232)和感兴趣的特征点301之间的距离D。三角测量法可以用于使用双目差异d(方程(4)中示出)确定距离D。具体地,感兴趣的特征点301的位置有指示i,由其坐标(x
其中,c
基于图像2321a和2321b和使用方程(3-(4),视觉传感器232可以确定坐标z
视觉传感器232的测量可以包括识别和/或选择图像2321a和2321b中的物体300的特征点301。可以基于机器视觉和/或人工智能方法等识别特征点301。适当的方法包括特征检测、提取和/或匹配技术,如RANSAC(随机样本一致性),Shi和Tomasi(Shi&Tomasi)角点检测,SURF斑点(快速鲁棒性特征)检测,MSER斑点(最大稳定极值区域)检测,SURF(快速鲁棒性特征)描述符,SIFT(尺度不变特征变换)描述符,FREAK(快速视网膜关键点)描述符,BRISK(二进制鲁棒性不变可扩展关键点)描述符、HOG(方向梯度直方图)描述符,等等。
当距离D小于和/或等于5米时,示例性视觉传感器232的距离测量误差范围可以在1厘米到50厘米的范围内。当物体300具有明显的纹理时,视觉传感器232可以识别特征点301。如果物体300没有足够的明显的纹理,视觉传感器232不能容易地识别特征点301和/或不能识别大量的特征点301。测量距离D的误差可能增加。没有足够的明显的纹理的示例性物体300可以包括单色墙、光滑的玻璃和/或类似物。
参见图8,示出了超声波传感器231。超声波传感器231可以以高频率发射超声波231c,并评估超声回波231d,该超声回波在从物体300反射后接收回来。基于发送超声波231c和接收超声回波231d之间的时间差,可以确定到物体300的距离D。超声波传感器231可以包括至少一个超声波发射器231a和至少一个超声波接收器231b。每一个超声波发射器231a和/或超声波接收器231b都可以是将电信号转换成超声波(或反之)的超声波转换器。示例性超声波转换器包括压电式转换器和电容式转换器。在一些实施例中,超声波传感器231可以包括一维或二维配置的阵列式超声波转换器,从而能够构建超声深度图。超声深度图可以显示移动平台200和物体300的一个或多个点之间的各个距离。
在某些实施例中,当距离D小于或等于5米时,示例性超声波传感器231的距离测量误差范围可以在20厘米到50厘米的范围内。对于没有足够的明显的纹理的物体300,如单色墙和/或光滑的玻璃,超声波传感器231可以以高精确度测量距离D。然而,对于吸收和/或减弱超声波的物体300,超声波传感器231可以以低精确度测量距离D。吸收和/或减弱超声波的示例性物体300包括某些类型的地毯。
参见图9,传感器230可以包括多个传感器组230A。每一个传感器组230A可以包括一个或多个超声波传感器231和/或一个或多个视觉传感器232。每一个传感器组230A可以监测各自的距离D(图1中示出)。传感器组230A可以被设置为分别面对相同的和/或不同的方向,以监测相应方向的各个距离D。
图9示出了四个传感器组230A用于在四个方向202上测量距离D,每一个方向都相互平行和/或垂直。可选地,传感器230可以包括第五和/或第六传感器组230A(未示出),其面对垂直于四个传感器组230A形成的正方形的方向203。可以加入更多传感器组230A以在更多方向测量距离D。
尽管图9示出了传感器组230A被排列为长方形和/或正方形,但移动平台200可以包括任意数量的相同的和/或不同的、排列为任何适当的形状的、大小和/或尺寸适合于布置在移动平台上的传感器组230A。例如,传感器组230A可以排列为三角形、线形、平行四边形、多边形和/或多面体的形状。
尽管图9示出了传感器组230A包括超声波传感器231和视觉传感器232,但传感器组230A可以只包括超声波传感器231和视觉传感器232中的一种。附加地和/或可替代地,传感器组230A可以包括一个或多个超声波传感器231和/或一个或多个视觉传感器232。使用多个处理器和/或传感器类型以检测距离物体300的距离D的优点是通过冗余使测量更准确,以及测量值对于特定传感器和/或传感器类型的局限性更加鲁棒。
参见图10,示出了示例性移动平台200的细节图。图10示出了作为无人机的移动平台200。传感器组230A可以安装在移动平台200上的配件板230B上。
当安装在移动平台200上时,传感器组230A可以包括传感器230(图9中示出),用于测量移动平台200和物体300(和/或其它物体或障碍物)之间的各个距离D。测量的距离D可以在多个方向上,其取决于传感器230的朝向。示例性方向可以包括相对于移动平台200的前、后、左、右、上和/或下。
参见图11,示出了用于确定移动平台200和物体300(图1示出)之间的距离D的示例性方法1110,其使用超声波测量值(本文中也指第一测量值)和视觉测量值(本文中也指第二测量值)中的至少一个。在步骤1111,可以使用超声波传感器231(图8中示出)测量距离D,以获取第一测量值。在步骤1112,可以使用视觉传感器232(图7中示出)测量距离D,以获取第二测量值。在步骤1113,可以基于第一测量值和第二测量值中的至少一个确定距离D。
以任何预定方式结合第一测量值和第二测量值的结果,可以确定距离D。例如,可以将距离D确定为第一测量值和第二测量值的简单平均值和/或加权平均值。
对于某些物体,第一测量值或第二测量值可能具有特别有限的精确度。因此,在一些示例中,基于物体300和/或测量方法的特征,距离D可以基于第一测量值和第二测量值中的一种。
例如,在由视觉传感器232得到第二测量值期间,视觉传感器232可能在物体300上未检测到感兴趣的纹理。当物体300具有感兴趣的纹理时,视觉传感器232可以在捕捉的物体300的图像中识别一个或多个特征点301。特征点301的数量可以等于和/或大于预定数量极限。达到预定数量极限可以确保第二测量值具有期望的精确度。因此,当由视觉传感器232得到的第二测量值在物体300上未检测到感兴趣的纹理时,可以基于由超声波传感器231得到的第一测量值确定距离D。
在另一个示例中,在由超声波传感器231得到第一测量值期间,超声波接收器231b(图8中示出)可能接收低于预定强度极限的超声回波。示例性预定强度极限可以基于超声波发射器231a发射的超声波强度的选择部分。当超声回波低于预定强度极限时,发射的超声波可能被物体300吸收和/或减弱。在这种情况下,超声波传感器231的精确度可能较低。因此,当由超声波传感器231得到的第一测量值接收低于预定强度极限的超声回波时,可以基于由视觉传感器232得到的第二测量值确定距离D。
在一些示例中,可以对物体300的选择位置执行任务。参见图12,移动平台200可以移动到(或靠近)物体300的选择服务点310。物体300的服务点310可以包括移动平台200能够执行任务的目标目的地。换句话说,移动平台200可以以到达服务点310完成任务作为目标。服务点310可以与物体300有任何空间关系。例如,服务点310可以在物体300表面的上方、与该表面相邻和/或在该表面下方。附加地和/或可替代地,服务点310可以在远离物体300的位置(或远端的)。
附加地和/或可替代地,物体300可以向服务点310移动以执行任务。然而,物体300不一定要到达服务点310。例如,当服务点310在物体300的表面时,移动平台200可以靠近(或移动到接近)服务点310,同时与服务点310(和/或物体300)维持距离D(图1中示出)。在另一个示例中,服务点310可以位于与表面相距距离D的位置。在这种情况下,移动平台200可以移动到(和/或到达)服务点310。
移动平台200可以根据服务点310的位置定位服务点310。服务点310的位置可以包括在绝对坐标系(或全局坐标系)中的服务点310的坐标。绝对坐标系可以是基于能够引导移动平台200的行进的系统。也就是说,控制系统210(图2中示出)可以指示移动平台200移动到和/或到达某个位置,该位置可以基于绝对坐标系统。出于说明性目的,图12示出了绝对坐标系为包括具有三个坐标轴X1、Y1、Z1的笛卡尔坐标系,以及选择服务点310的坐标为在绝对坐标系中的(x1,y1,z1)。
物体300可以定义相对坐标系(或局部坐标系)。相对坐标系可用于定义选择的服务点310和物体300之间的空间关系。出于说明性目的,图12示出了相对坐标系为包括具有三个坐标轴X2、Y2、Z2的笛卡尔坐标系,以及选择的服务点310的坐标为在相对坐标系中的(x2,y2,z2)。在相对坐标系中选择的服务点310的坐标(x2,y2,z2)可以表示选择的服务点310和物体300之间的空间关系。
可以基于在相对坐标系中服务点310的坐标来定义和/或选择给定的服务点310,而不管使用什么样的绝对坐标系。例如,当物体300包括飞行器时,选择的服务点310可以是物体300的右翼的翼端。该选择可以基于物体300在相对坐标系中进行。
对于给定的服务点310,可以固定相对坐标系中的坐标(x2,y2,z2),而不管物体300是如何放置在绝对坐标系中的。在绝对坐标系中的坐标(x1,y1,z1)可以根据物体300如何放置在绝对坐标系中而变化。相对坐标系和绝对坐标系中的坐标可以分别称为相对坐标和绝对坐标。
参见图12和图13,图13中物体300的位置和/或方向可以不同于图12中物体300的位置和/或方向。当物体300进行移动时会产生差异。例如,物体300可以包括飞行器,其可以每一次都不同地定位在维护设备处。在另一个示例中,物体300可以在被移动平台200服务的同时连续地移动。
相应地,图13中的相对坐标系(或三个坐标轴X2,Y2,Z2)可以与图12中的相对坐标系不同。在图12和图13中,具有三个坐标轴X1、Y1、Z1的绝对坐标系可以保持不变。
因此,在图13中,在相对坐标系中的选择的服务点310的坐标仍然可以是(x2,y2,z2)。然而,在绝对坐标系中选择的服务点310的坐标已经改变为(x1’,y1’,z1’)。
对于相对坐标系中坐标为(x2,y2,z2)的选择的服务点310,可以基于绝对坐标系和相对坐标系之间的转换关系得到绝对坐标系中的坐标(x1,y1,z1)。也就是说,对于给定的服务点310,转换关系是绝对坐标和相对坐标之间的关系。当已知转换关系时,可以基于相对坐标(x2,y2,z2)得到绝对坐标(x1,y1,z1)。
示例性转换关系可以包括以下表达式:
其中a1、b1、c1、a2、b2、c2、a3、b3和c3是绝对和相对坐标系之间的转换关系的转换系数。当物体300静止时,可以固定转换关系,和/或,当物体300移动时,可以改变转换关系。
在一些实施例中,当绝对坐标系中物体300的位置和方向确定了时,可以确定转换关系。因此,坐标(x1,y1,z1)可以基于绝对坐标系中物体300的位置和方向。
可以用任何方式来确定转换关系。例如,可以使用能够提供转换系数的值的方法确定转换关系。在某些例子中,可以基于一个或多个控制点确定转换关系。也就是说,物体300的位置和方向可以基于一个或多个控制点。控制点可以指具有至少部分已知的一个或多个坐标以便计算转换关系的点。
参见图14,可以通过至少一个控制点330a确定物体300的位置。控制点330a可以与物体300具有预定空间关系,由相对坐标(x2a,y2a,x2a)表示。控制点330a可以有绝对坐标(x1a,y1a,x1a)。
物体300的位置可以通过绝对坐标(x1a,y1a,x1a)表示。当确定物体300的位置时,移动平台200可以定位物体300。然而,为了使移动平台200定位选择的服务点310,可能需要确定物体300的方向。
可以通过一个或多个控制点确定物体300的方向。参见图15,控制点可以包括控制点330a和控制点330b、330c。控制点330b、330c可以与物体300具有各自的预定空间关系,由相对坐标(x2b,y2b,x2b)、(x2c,y2c,x2c)表示。控制点330b可以有绝对坐标(x1b,y1b,x1b)、(x1c,y1c,x1c)。
物体300的方向302可以包括方向302B、302C。方向302B、302C可以是矢量。方向302B可以由相对坐标(x2b-x2a,y2b-y2a,z2b-z2a)和/或绝对坐标(x1b-x1a,y1b-y1a,z1b-z1a)表示。方向302C可以由相对坐标(x2c-x2a,y2c-y2a,z2c-z2a)和/或绝对坐标(x1c-x1a,y1c-y1a,z1c-z1a)表示。因此,通过控制点330a-330c,可以确定物体300如何在绝对坐标系中定向。
基于在绝对坐标系中物体的位置和/或方向,移动平台200可以定位选择的服务点310。
也就是说,可以得到绝对和相对坐标系之间的转换关系。例如,通过方程(5),在(x1a,y1a,x1a)和(x2a,y2a,x2a)处的控制点330a、在(x1b,y1b,x1b)和(x2b,y2b,x2b)处的控制点330b和在(x1c,y1c,x1c)和(x2c,y2c,x2c)处的控制点330c中的每一个都可以提供三个方程。九个方程可以用于求解变换系数a1、b1、c1、a2、b2、c2、a3、b3和c3。由此可以得到转换关系。
参见图16,与物体300相关地示出了示例性控制点330a、330b的细节图。图16示出了物体300作为飞行器300A。图16示出了控制点330a作为沿飞机的中线303在飞行器300A最前部的前方预定距离L1处的点。图16示出控制点330b为沿中线303在控制点330a前方预定距离L2处的点。L1和L2可以是相同的和/或不同的。图16示出了方向302B为飞行器300A的前方方向。
如图16所示,物体300的三维方向可以至少部分已知。例如,飞行器300A可以与地面齐平。因此,二维变换关系可以充分描述飞行器300A的位置和/或方向。即,绝对和相对坐标系均可以分别包括两个轴(X1,Y1)、(X2,Y2)。
例如,转换关系可以有如下表达式:
因此,通过控制点330a、330b,可以确定飞行器300A在绝对坐标系中的位置和方向。
基于在绝对坐标系中的物体的位置和/或方向,移动平台200(图12中示出)可以定位选择的服务点310。
也就是说,可以得到绝对和相对坐标系之间的转换关系。例如,通过方程(6),在(x1a,y1a)和(x2a,y2a)处的控制点330a、在(x1b,y1b)和(x2b,y2b)处的控制点330b可用于求解转换系数a1、b1、a2和b2。由此可以得到转换关系。
参见图17,示出了用于确定选择的服务点310(图12中示出)的位置的示例性方法1120。在步骤1121,可以获得选择的服务点310和物体300之间的空间关系。例如,选择的服务点310和物体300之间的空间关系可以根据物体300的模型(未示出)获得。例如,空间关系可以表达为在相对坐标系中选择的服务点310的坐标(x2,y2,z2)(图12中示出)。
模型可以指物体300的复制品,该复制品部分地和/或完全复制了物体300的形状、大小和/或维度。示例性模型可以包括计算机化的二维和/或三维模型。
在步骤1122,可以获得物体300的位置和方向。例如,通过控制点330a(图14中示出)可以获得位置。例如,通过控制点330a、330b和/或330c(图15和图16中示出)可以获得物体300的方向。
控制点330a-330c可以与物体300有各自的预定空间关系。预定空间关系可以用相对坐标表示,其可以基于物体300的模型获得。
附加地和/或可替代地,控制点330a-330c可以有各自的绝对坐标,该绝对坐标可以通过任何导航方法获得。示例性导航方法可以包括全球定位系统(GPS)。例如,位置追踪装置(如GPS装置)可以定位在选择的控制点310,并测量绝对坐标。位置追踪装置可以通过任何方法和/或工具,如人类操作员、机械臂和/或升降机放置在选择的控制点。
为提高位置追踪装置测量绝对坐标的精确度,控制点和/或服务点之间的间距可以大于预定间距极限。例如,L1和/或L2(图16中示出)可以大于预定间距极限。因此,位置追踪装置可以避免将两个点(如控制点330a,330b)错误地识别为一个单点。示例性预定间距极限可以大于和/或等于1米。
在步骤1123,基于选择的服务点310和物体300之间的空间关系,和/或相对和绝对坐标系之间的转换关系,可以确定选择的服务点310的位置。
尽管使用笛卡尔坐标系说明绝对和相对坐标系,但绝对和/或相对坐标系可以包括任何相同和/或不同类型的坐标系。示例性坐标系可以包括柱面坐标系、球面坐标系和/或地理坐标系。
尽管图14和图15示出了控制点330a用于确定物体300的位置和方向,但物体300的位置和方向可以分别基于任何相同和/或不同的控制点。图14和图16示出了可以通过一个控制点确定物体300的位置。图15和图16示出可以分别通过3个和2个控制点确定物体300的方向。然而,可以通过任意数量的控制点确定物体300的位置和/或方向。用于确定物体300的位置和方向的控制点的数量相同和/或不同的。
参见图18,示出了物体300的示例性感兴趣的区域320。区域320上可以有一个或多个服务点310。移动平台200可以沿行进路径340移动到选择的服务点310。当区域320上有一个或多个服务点310时,行进路径340可以连接多个选择的服务点310。
移动平台200(图12中示出)可以沿行进路径340移动以穿过选择的服务点310,并对至少一个选择的服务点310执行任务。例如,当移动平台200包括无人飞行器时,移动平台200可以沿行进路径340飞行。当移动平台200行进和/或执行任务时,可以预先确定、固定和/或动态调整行进路径。
参见图19,移动平台200可以包括用于确定移动平台200位置的位置追踪装置280。示例性位置追踪装置280可以包括全球定位系统(GPS)模块和/或差分GPS(或DGPS)模块(未示出)。
当位置追踪装置280包括DGPS模块时,位置追踪装置280可以操作以与基站600通信。基站600可以包括建立在精确的已知地理位置的GPS接收器。例如,在美国和加拿大,基站600可以包括由美国海岸警卫队(USCG)和加拿大海岸警卫队(CCG)操作的DGPS基站系统。DGPS基站系统可以在主要航道和港口附近以285kHz和325kHz之间的长波无线电频率与位置追踪装置280通信。
基站600可以基于卫星信号计算自己的位置,并将计算位置与已知位置进行比较。计算位置和已知位置之间的差值可以提供差分校正。因此,基站600可以向位置追踪装置280自动地和/或响应位置追踪装置280广播差分校正。
基站600可以通过任何有线和/或无线通信方法与位置追踪装置280通信。示例性方法可以包括射频(RF)通信。
当位置追踪装置280测量位置追踪装置280和/或移动平台200的位置时,位置追踪装置280可以应用差分校正来校正位置追踪装置280记录的GPS数据。因此,校正后的GPS数据是DPGS信号。进行校正后,移动平台200的位置的GPS数据具有高精确度。例如,如果不进行校正,GPS可以测量移动平台200的位置,误差约为2米。当进行校正时,位置追踪装置280可以测量移动平台200的位置,误差小至10厘米。因此,移动平台200可以以高精确度移动到选择的位置。
尽管图19出于说明性目的,示出了位置追踪装置280与一个基站600进行通信,但位置追踪装置280可以与任何预定数量的相同和/或不同的基站600进行通信。尽管图19示出了基站600与位置追踪装置280通信,但位置追踪装置280不一定从基站600接收差分校正。附加地和/或可替代地,位置追踪装置280可以从一个或多个卫星接收差分校正。例如,广域DGPS(WADGPS)和/或星基增强系统可以包括一个或多个位于精确勘测点的地面基站。基站600可以获取数据,如差分校正。基站600可以测量一个或多个卫星、卫星信号和/或其它可能影响由位置追踪装置280接收的信号的环境因素。基站600可以将测量结果和/或差分校正的结果发送给一个或多个卫星。卫星可以向位置追踪装置280广播校正信息。
参见图20,示出了移动平台200的细节图。图20示出了移动平台200作为无人飞行器。示出了位置追踪装置280包括安装在移动平台200上的DGPS模块280A。
在某些实施例中,基站600(图19中示出)可以是可携带的并可以包括GPS接收器。基站600可以设置在选择的位置。可以将设立基站600的位置准确勘测并记录为已知位置。在某些实施例中,基站600可以通过433MHz射频信号与DGPS模块280A通信。通过使用可携带基站600,操作员可以在任何位置上有利地操作无人飞行器,而无需限制于固定的基站600的位置。
参见图21,示出了移动平台200能够与有效载荷290连接。有效载荷290可以对物体300执行任务。例如,有效载荷290可以对选择的服务点310(图12中示出)执行任务。
可选地,如图21所示,有效载荷290可以通过载体292与移动平台200连接。载体292可以允许有效载荷290相对于移动平台200围绕一个或多个轴旋转,如三个轴,X(或俯仰)轴,Z(或横滚)轴,Y(或偏航)轴。因此,即使移动平台200的方向保持不变,有效载荷290也可以朝向多个方向中的任意方向。
可选地,载体292可以稳定有效载荷290以抵抗移动平台200的运动。例如,载体292可以提供减震功能来减少由于移动平台200的运动引起的有效载荷290的振动。附加地和/或可替代地,载体292可以包括一个或多个传感器来测量由于移动平台200的位置漂移导致的有效载荷290的不需要的移动。因此,有效载荷292可以通过调整有效载荷290的方向和/或位置来补偿移动。因此,即使在移动平台200振动、摇晃和/或漂移的情况下,有效载荷290可以保持稳定并以更高的定位精确度对选择的服务点310执行任务。
尽管图21示出了移动平台200包括一个有效载荷290和一个载体292,但移动平台200可以包括任意数量的相同和/或不同的有效载荷290。有效载荷290可以通过任意数量的相同和/或不同的载体292连接到移动平台200。某些有效载荷290有效载荷290可以不需要载体292而连接到移动平台200。
移动平台200可以通过使用有效载荷290执行一个或多个相同和/或不同的任务。在某些实施例中,移动平台200可以使用各自的有效载荷290执行每一个相同和/或不同的任务。附加地和/或可替代地,有效载荷290可以执行一个或多个相同和/或不同的任务。附加地和/或可替代地,多个有效载荷290可以协作地执行任务。
参见图22,示出了移动平台200的细节图。图22示出了移动平台200作为无人飞行器。有效载荷290可以包括相机290A。相机290A可以捕捉到物体300的静止和/或视频图像。
载体292可以包括云台292A。在某些实施例中,云台292A可以包括三轴云台。移动平台200可以控制云台292A以调整相机290A的方向。因此,当移动平台200以固定方向悬停在空中时,相机290A可以朝向多个方向中的任意方向,以多个视角捕捉物体300的图像。
参见图23,移动平台200可以与任务管理器400通信。任务管理器400可以包括计算机装置。示例性任务管理器400可以包括移动电话、智能电话、平板电脑、个人电脑、服务器计算机和/或类似物。移动平台200和任务管理器400之间的通信可以是有线的和/或无线的。例如,任务管理器400和/或移动平台200都可以包括射频电路(未示出)。射频电路可以包括,但不限于,天线、至少一个放大器、调谐器、一个或多个振荡器、用户身份识别(SIM)卡、收发器、耦合器,LNA(如:低噪声放大器)、双工器等。射频电路可以通过无线通信网络与其他装置通信。无线通信可以使用任何通信标准或协议,包括但不限于,GSM(全球移动通信系统)、GPRS(通用分组无线业务)、CDMA(码分多址接入)、WCDMA(宽带码分多址接入)、LTE(长期演进)、电子邮件、SMS(短消息服务)。
当使用有效载荷290执行任务时,移动平台200可以获得数据204。例如,当有效载荷290包括相机290A(图22中示出)时,数据204可以包括相机290A捕捉的图像。
附加地和/或可替代地,当有效载荷290包括用于测量物体300的性质的仪器时,数据204可以因此包括仪器获得的测量结果。示例性测量可以包括引导光到物体300的表面以测量表面的性质,如光反射系数。
移动平台200可以向任务管理器400提供数据204。任务管理器400可以处理和/或分析数据204。基于处理和/或分析,任务管理器400可以确定移动平台200执行的后续任务,并相应地生成命令206。示例性命令206可以指示移动平台200更新任务和执行更新的任务。附加地和/或可替代地,示例性命令206可以指示移动平台200以调整有效载荷290(图21中示出)的方向。附加地和/或可替代地,示例性命令206可以指示移动平台200移动到不同位置,暂停任务,和/或停止任务。
参见图24,示出了使用移动平台200服务物体300的示例性方法1200。在步骤1210,通过使用移动平台200的相机290A(图22中示出)可以捕捉物体300的图像。例如,相机290A可以捕捉物体300表面的图像。
在步骤1220,可以将图像传输到任务管理器400(图23中示出),用于物体300的分析。例如,当相机290A捕捉物体300表面的图像时,物体300的分析可以包括基于图像的物体300的表面的分析。
例如,任务管理器400可以呈现和/或显示图像以使操作者可视地检查物体300。附加地和/或可替代地,任务管理器400可以将图像传输到第三方的计算机系统进行分析、检查和/或存储。
附加地和/或可替代地,任务管理器400可以执行一个或多个图像特征识别(和/或特征检测)方法。特征可以指图像中的感兴趣的部分。示例性特征可以包括边、角、点和/或脊。特征可以具有选择的特性,如形状、大小、尺寸、颜色、纹理和/或类似的特性。特征的选择取决于移动平台200被配置执行的任务的类型。
特征识别方法可以确定选择类型的特征是否存在于图像中的点上。示例性特征识别方法可以包括边缘检测和/或图像二值化。
任务管理器400可以基于图像的分析生成命令206(图23)。例如,当任务管理器400,第三方和/或人工检测到图像中感兴趣的特征时,任务管理器400可以选择该特征,并发送用于捕捉选择的特征的放大图像的命令206。附加地和/或可替代地,任务管理器400可以发送命令206以调整相机290A的方向,以从不同的视角捕捉选择的特征,以更好地观察特征。
通过使用公开的方法,可以有利地提高服务物体300的自动化和效率。例如,为了检查物体300的表面,移动平台200可以反复地返回到物体300的选择的位置以进行反复的检查,即使在每次检查时物体300的位置和/或方向都不同。
附加地和/或可替代地,移动平台200可以有利地接近物体300并避免与物体300碰撞。因此,移动平台200可以在近距离捕捉物体300的图像。因此,图像可以以足够高的清晰度和/或分辨率呈现物体300表面的特征和/或形貌。因此,通过分析图像可以检测表面。
附加地和/或可替代地,移动平台200可以向任务管理器400传输图像用于分析。任务管理器400可以远离物体300。当移动平台200捕获图像时,可以实时分析图像。附加地和/或可替代地,可以实时生成基于图像的反馈,并且任务管理器400可以根据反馈生成命令206。因此,移动平台200可以基于命令206操作,以及时获取调整内容和/或质量后的新图像。
附加地和/或可替代地,实时分析和/或反馈的实现需要和/或不需要人工的干预或参与。即使人工分析图像,人也不需要在物体300的位置出现。因此,可以减少人力成本和时间。
参见图25,示出了多个移动平台200A-200C服务物体300。移动平台200A-200C可以分别移动到服务点310A-310C。移动平台200A-200C可以分别执行相同和/或不同的任务。
移动平台200A-200C可以互相合作完成任务。即,每一个移动平台200A-200C可以执行一个任务的至少一部分,以共同地执行该任务。附加地和/或可替代地,每一个移动平台200A-200C可以执行多个任务中的一个或多个,以共同地执行多个任务。
例如,当物体300在地面上时,移动平台200A可以捕捉到物体300的上表面的图像。移动平台200C可以在物体300和地面之间行进,以捕捉物体300下表面的图像。因此,通过相互合作工作,移动平台200A和200C可以分别捕获呈现物体300的不同部分的图像,并相互补充。
多个移动平台200A-200C可以同时和/或依次地对物体300执行任务。多个移动平台200A-200C可以是相同和/或不同的。示例性移动平台可以包括无人飞行器和/或地面交通工具。尽管图25示出了三个移动平台,但任意数量的相同和/或不同的移动平台200可以合作执行任务。多个移动平台200可以服务一个服务点。附加地和/或可替代地,一个移动平台200可以服务多个服务点。
参见图26,系统100还可以包括用于与移动平台200通信的终端装置500。终端装置500可以包括任何计算机系统。示例性终端装置500可以包括移动电话、智能电话、平板电脑、个人电脑、服务器计算机和/或类似物。
在移动平台200的操作期间,终端装置500可以远离移动平台200以服务物体300。终端装置500可以为移动平台200提供指令以实现本文公开描述的功能。
参见图27,终端装置500可以包括处理器(和/或中央处理器,或CPU)510。尽管图21中示出了一个处理器510,但终端装置500可以包括任意数量的相同和/或不同的处理器510。
终端装置500可以包括存储器520。存储器520可以包括高速随机存取存储器(RAM)。附加地和/或可替代地,存储器520可以包括非易失性存储器,如一个或多个磁盘存储设备、闪存装置和/或其它非易失性固态存储装置。尽管图27中示出了一个存储器520,但终端装置500可以包括任意数量的相同和/或不同的存储器520。
处理器510可以运行(或执行)存储在存储器520中的各种软件程序和/或指令集以执行终端装置500的各种功能。
终端设备500可以包括通信模块530。通信模块530可以操作以与另一个计算机系统(如移动平台控制系统210(图2中示出),和/或第三方的计算机系统)通信。示例性通信模块530可以包括射频电路,其可以无线地接收和/或传输信息。终端装置500可以直接和/或通过路由装置与移动平台200通信。
附加地和/或可替代地,终端装置500可以包括显示系统540。在某些实施例中,显示系统540可以包括触敏显示器,也可以称为“触摸屏”。显示系统540可以显示存储在终端装置500中的信息来用于呈现。
参见图28,终端装置500可以连接远程控制器502。例如,终端装置500可以通过外部通信端口连接远程控制器502,该端口支持如通用串行总线(USB)、火线和/或类似的标准。远程控制器502可以包括一个或多个处理器(未示出),用于至少部分地控制移动平台200的操作。远程控制器502可以通过有线和/或无线方法与移动平台200通信。例如,各种无线通信方法可用于移动平台200和远程控制器502之间的远程通信。适当的通信方法包括,例如,无线电、无线保真(Wi-Fi)、蜂窝、卫星和广播。
终端装置500可以通过远程控制器502与移动平台200通信。即,移动平台200可以向远程控制器502传输数据。远程控制器502可以将数据转送到终端装置500。另一方面,终端装置500可以将指令转送到远程控制器502。远程控制器502可以将指令传输到移动平台200。也就是说,远程控制器502可以作为数据交换通道操作以在终端装置500和移动平台200之间进行路由通信。
图29是示出了通过移动平台200服务物体300的方法2000的实施例的示例性顶层流程图。终端装置500(图27中示出)可以实现方法2000。
在步骤2100,基于物体300的模型,可以确定一个或多个服务点310。终端装置500基于物体300的模型可以确定服务点310(图12中示出)。
例如,物体300可以包括飞行器,如客机。因此,模型可以包括飞机的三维信息。示例性三维信息可以包括机身的长度、宽度和/或高度,飞机前表面的倾角,机翼翼根和/或翼端的倾斜角,机翼翼根和翼端之间的倾斜角,水平尾翼和/或水平尾翼的宽度,或其组合。
在步骤2200,引导移动平台200在被识别的服务点310执行一个或多个任务。终端装置500可以引导移动平台200执行任务。例如,终端装置500可以引导移动平台200捕捉物体300的图像。
附加地和/或可替代地,终端装置500可以引导移动平台200维持与物体300的距离D(图1中示出)。终端装置500可以确定维持的距离D的距离范围。例如,终端装置500可以确定保持距离D的下限和/或上限。
参见图30,示出了用于识别一个或多个服务点310的方法2100。终端装置500(图27中示出)可以实现方法2100。
在步骤2110,可以获得物体300的模型。终端装置500可以从任何来源获得模型。例如,物体300的制造商和/或建造者可以提供模型。可以通过特定人/机器测量物体300以生成模型。当物体300的形状、大小和/或尺寸变化时,模型可以相应地变化。
终端设备500可以从另一个计算机系统和/或模型库获得模型。附加地和/或可替代地,终端装置500可提前在存储器520中存储模型,并从存储器520中调取模型。
在步骤2120,基于模型选择感兴趣的区域320。终端装置500可以在物体300上选择区域320(图18中示出)。例如,区域320可以是物体300的感兴趣的表面区域,如在使用物体300的过程中有高概率损伤的表面区域。
终端装置500可基于预定选择标准自主选择区域320,和/或基于输入到终端装置500的选择指令选择区域320。
在步骤2130,确定服务点310在区域320上的分布。服务点310的分布可以指服务点310的密度,和/或服务点310和物体300之间的空间关系。终端装置500可以基于任何标准确定服务点310的分布。
例如,当移动平台200定位于距离服务点310的距离D处时,有效载荷290可以对区域320的子区域执行任务。子区域的大小和/或形状可以基于距离D和/或有效载荷290(图21中示出)的性质。例如,相机290A(图22中示出)可以在距离D处捕捉具有一定大小的子区域的图像。
为了完整地对区域320执行任务,终端装置500可以基于子区域和区域320的大小和/或形状确定密度。终端装置500可以根据确定的密度确定和/或选择服务点310。附加地和/或可替代地,终端设备500可以确定移动平台200的行进路径,以穿过服务点310。
尽管方法2100可以包括步骤2110-2130,但可以忽略2110-2130中的一个或多个。
附加地和/或可替代地,终端装置500可以确定选择的服务点310的位置(图12中示出)。基于模型,终端装置500可以确定选择的服务点310和物体300之间的空间关系。
附加地和/或可替代地,基于模型,终端装置500可以确定选择的控制点(如图15和图16所示的控制点330a-330c)和物体300之间的空间关系。
为了确定控制点的绝对坐标,位置追踪装置可以定位在控制点以测量控制点330的绝对坐标。位置追踪装置可以将测量结果发送至终端装置500。
在某些实施例中,移动平台200上的位置追踪装置280(图19中示出)可用于确定控制点330的绝对坐标。在一个示例中,移动平台200上的DGPS模块280A(图19中示出)可以用于确定控制点330的绝对坐标。换句话说,移动平台200可以被人和/或机器定位在选择的控制点。DGPS模块280A可以测量移动平台200的GPS位置,从而获得控制点在绝对坐标系中的位置。当物体300的位置和/或方向变化时,可以执行对控制点的绝对坐标的测量,从而可以更新服务点310的位置。
附加地和/或可替代地,当移动平台200包括相机290A(图22中示出)时,终端装置500可以引导移动平台200以一个或多个视角捕捉物体300的图像。移动平台200可以引导载体292以调整相机290A的方向,从而调整捕捉图像的角度。
附加地和/或可替代地,移动平台200可以向终端装置500发送图像用于分析。终端装置500可以实时分析图像和/或将图像发送给第三方进行分析和/或存储。可选地,显示系统540(图27中示出)可以显示图像以供检查。
各种实施例还公开了包括用于操作移动平台100的指令的计算机程序产品。程序/软件可以存储在(非暂时性)计算机可读存储介质中,包括,例如:只读存储器(ROM)、随机存取存储器(RAM)、内存、寄存器、计算机硬盘、可移动磁盘、CD-ROM、光盘、软盘、磁盘等。程序/软件可以包括编码指令以指示计算机装置上的一个或多个处理器按照各种公开的实施例执行方法。例如,可以以应用程序、应用和/或应用程序软件的形式在计算机和/或移动装置上执行程序/软件。
本发明的实施例可具有各种修改和替代形式,并且其具体的示例已经借助附图中的示例示出以及在本文中详细描述。但是,应当理解,本发明的实施例不受所公开的特定形式或方法的限制,相反,本发明的实施例旨在涵盖所有的修改、等同形式和替代方式。
- 生物体信息处理系统、可穿戴装置、服务器系统及生物体信息处理系统的控制方法
- 生物体信息处理系统、服务器以及生物体信息推断方法