一种用于酒店快捷送餐的机器人及其使用方法
文献发布时间:2023-06-19 12:22:51
技术领域
本发明属于智能机器人技术领域,具体涉及一种用于酒店快捷送餐的机器人。
背景技术
随着科技发展,现代化进程加快,人们对于摆脱简单、重复、低技术含量劳动的需求增多,机器人逐渐走入人们生活之中来帮助完成相应的工作。现在的餐饮行业是典型的劳动密集型行业,工作繁重,强度大,重复性高,效率低下。为了解决上述问题,很多餐饮企业选择用智能机器人来代替人工。
但在现有技术中的具有送餐功能的机器人只具有敞开式送餐方式,食物在运送过程中容易受到污染或者溅出,容易影响食品安全以及餐饮环境。
公开号为CN207055308U的专利公开了一种仿真送餐机器人,包括人形本体,所述人形本体包括头部与躯体,所述头部设有可旋转张合的口腔部,所述躯体上设有用于放置餐品的储放部,所述躯体底部设有用于驱动所述人形本体移动的驱动模块,所述人形本体上设有感应控制模块与扬声器,所述感应控制模块用于感应外界信号并控制所述仿真送餐机器人;一种仿真送餐机器人系统,包括所述仿真送餐机器人与设于应用环境中的位置标识物,所述位置标识物用于为所述感应控制模块提供位置识别参考系。本实用新型提供了一种仿真度高、自动化程度好的仿真送餐机器人及系统。
公开号为CN207055308U的专利公开了一种智能送餐机器人,包括后台服务端和送餐机器人,所述送餐机器人包含机器人本体、获取单元和发送单元,机器人本体上设置、获取单元、发送单元和语音提醒装置,后台服务端与获取单元和发送单元进行通信连接,所述获取单元用于获取送餐机器人的位置信息,其中,送餐机器人用于将餐品运送到目标位置;发送单元用于在送餐机器人到达目标位置的情况下,在目标范围内发送红外信号,其中,红外信号中携带有送餐机器人的位置信息,所述送餐机器人通过后台服务器设置有预设送餐路径,当所述送餐机器人判断出预设的触发事件发生时,所述送餐机器人通过语音提醒装置发送与所述触发事件对应的语音消息。
公开号为CN207984992U的专利公开了一种送餐机器人,包括机身和动力单元;所述动力机构为履带动力单元,所述履带动力单元的履带工作高度小于80毫米;在所述机身底端的前部设置有支撑机构,所述支撑机构的活动端不超过履带的前端。本实用新型送餐机器人通过降低履带动力单元的尺寸,尤其是高度,降低了动力单元的重量,不仅降低了动力单元的成本,也降低了动力单元的能耗,通过在送餐机器人底部安装与履带配套的连杆支撑机构,弥补了因高度降低而导致的爬越障碍能力的损失;提高了产品的经济性。
但是,仍然存在下列问题:
1、采用比较笨重的履带作为动力,经济性较差;
2、送餐效率低,夹持力度不够,释放容易滑动造成食物溢出。
发明内容
针对现有技术中存在的上述不足之处,本发明提供了一种用于酒店快捷送餐的机器人,用以解决现有技术送餐效率低,夹持力度不够,释放容易滑动造成食物溢出等问题,本发明还提供了该装置的使用方法。
为了解决上述技术问题,本发明采用了如下技术方案:
一种用于酒店快捷送餐的机器人,包括移动机构、升降机构、夹持机构,所述升降机构设于移动机构上方,所述夹持机构底端与升降机构顶端固定连接;
所述升降机构包括第一升降臂、第二升降臂、升降前架和升降后架,所述升降前架设于升降后架前方,所述第一升降臂与第二升降臂均安装在升降前架本体上,所述第一升降臂设于第二升降臂上方。
进一步的,所述第一升降臂包括左臂、右臂、固定杆和滑动组件,所述左臂设于固定杆左端,所述右臂设于固定杆右端,所述滑动组件设于固定杆后方,且所述滑动组件一端连接左臂,所述滑动组件另一端连接右臂。
进一步的,所述升降前架包括左滑杆、右滑杆、尼龙滑块和后固定杆,所述尼龙滑块设有两个,两个所述尼龙滑块分别套设于左滑杆、右滑杆上。
进一步的,所述夹持机构包括夹持固定架、夹持滑动板、夹持伸缩组件和夹持活动臂,所述夹持滑动板固定于夹持固定架前端,所述夹持滑动板中段与夹持伸缩组件尾端固定连接,所述夹持活动臂后端与夹持滑动板活动连接,所述夹持活动臂中段与夹持伸缩组件活动连接。
进一步的,所述夹持伸缩组件还包括伸缩管与固定管,在所述伸缩管与固定管之间安装一个摩擦环,所述摩擦环套接在所述伸缩管外侧,且所述摩擦环与所述伸缩管的外侧接触,使所述伸缩管下滑伸缩时处于阻尼状态。
进一步的,所述摩擦环的两端外径不一,且所述摩擦环口径较小的一端与所述伸缩管的外侧接触。
进一步的,所述摩擦环呈锥爪型,且摩擦环的锥部朝向下方。
上述的一种用于酒店快捷送餐的机器人的使用方法,包括以下步骤:
S2-1,送餐箱夹持:通过左臂和右臂对送餐箱两侧进行夹持,所述第一升降臂夹持的箱体先堆叠置于第二升降臂上方;
S2-2,夹持上升:在具体夹持上升时,滑动组件通过带动左臂和右臂通过设于固定杆上的滑轨向内滑动,对送餐箱进行夹紧,通过外部电机随后带动左滑杆与右滑杆连接后固定杆所使用的尼龙滑块对第一升降臂进行上下滑动,使送餐箱对准送餐位置。
上述的使用方法,S3又包括:
S3-1,送餐夹紧:当第一升降臂将送餐箱送至指定位置后,夹持滑动板通过夹持固定架下滑,夹持伸缩组件向两侧伸出,使夹持活动臂张开,夹持活动臂对送餐箱进行夹紧,随后夹持滑动板夹紧上升,同时夹持固定架通过设于移动机构的旋转台进行旋转对夹持滑动板的角度进行调节;
S3-2,送餐释放:当送餐箱移动至指定位置,夹持伸缩组件向两侧收回,夹持活动臂对送餐箱进行释放,随后夹持滑动板夹紧下降,将送餐箱放置指定位置。
本发明与现有技术相比,具有如下有益效果:
本发明的优点在于通过左臂和右臂对送餐箱两侧进行夹持,第一升降臂夹持的箱体置于第二升降臂上方,送餐箱箱体两侧设有配合左臂和右臂对应的凹槽,在左臂和右臂对送餐箱两侧进行夹持时,左臂和右臂卡入送餐箱箱体两侧的凹槽内,避免在送餐机器人送餐行进过程中侧翻,同时有效的避免了左臂和右臂在升降过程中由于送餐箱产生向下而导致第一升降臂夹持松开导致送餐箱掉落的问题。
本发明的优点在于伸缩管和固定管之间安装一呈锥形的摩擦环,摩擦环套接在伸缩管的外侧,且摩擦环的内侧表面与伸缩管的外侧表面接触,当锁紧旋钮打开时,使伸缩管下滑时与摩擦环之间形成一定的滑动摩擦力,从而伸缩管在下滑处于阻尼状态,下降的速度相应减慢。在此实施方式下,摩擦环安装固定时其锥部301朝上或是朝下,都可在伸缩管的下滑时提供一定的摩擦力,摩擦环的锥部朝向下方,且其锥部紧靠伸缩管的外侧,在摩擦环的上端相连有一调节装置,该调节装置可为一滑块结构,优选为环状物,其内侧与外侧分别于伸缩管的外侧、锁紧装置的内侧相靠;当锁紧旋钮松开后,伸缩管向下运动,调节装置会受到向下的摩擦力,继而提供给锥爪型摩擦环向下压紧的力时,摩擦环的锥部会在定值口径的导向下向环中心靠拢来增加摩擦环和伸缩管的压力,从而增加了伸缩管的滑动摩擦力,达到了在锁紧旋钮处于松弛状态时伸缩组件仍然处于一定的阻尼状态,避免伸缩组件迅速下落。
本发明的优点在于伸缩组件由伸缩管、固定管及锁紧装置组成。固定管收容伸缩管,使伸缩管可上下伸缩,锁紧装置套接在固定管和伸缩管的接口处周围,其包含锁紧旋钮及外壳,当锁紧旋钮旋紧时,伸缩管相对固定管静止,当锁紧旋钮打开时,伸缩管相对固定管呈下降运动。此外,锁紧装置的上端设置有与伸缩管外侧相靠的上端滑块,且伸缩管的下端设置有与固定管内侧相靠的下端滑块,上端滑块和下端滑块可使伸缩管在做伸缩运动时减少晃动。
附图说明
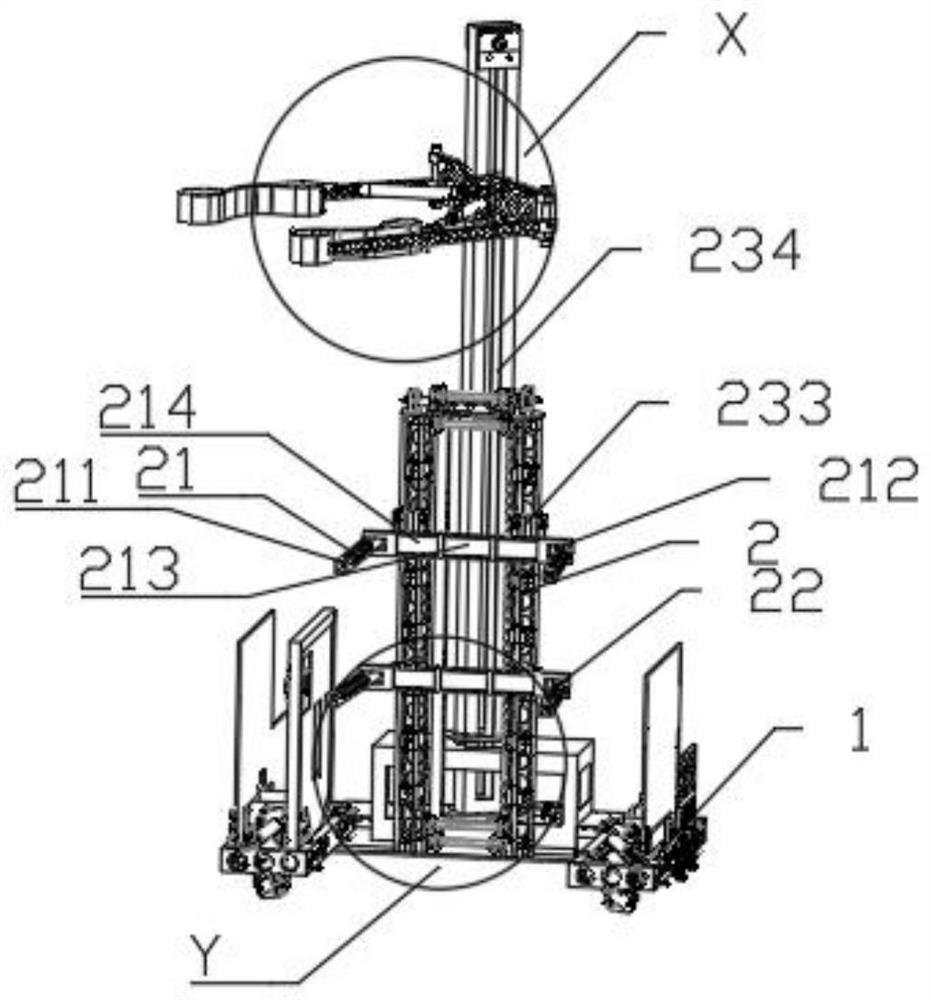
图1为本发明一种用于酒店快捷送餐的机器人实施例的立体结构示意图一;
图2为图1中Y处的局部放大结构示意图;
图3为图1中X处的局部放大结构示意图;
图4为本发明一种用于酒店快捷送餐的机器人实施例中滑动固件的立体结构示意图二;
图5为本发明一种用于酒店快捷送餐的机器人实施例中滑动固件的立体结构示意图三;
图6为本发明一种用于酒店快捷送餐的机器人实施例中的局部结构示意图;
说明书附图中的附图标记包括:
移动机构1;
升降机构2、第一升降臂21、左臂211、右臂212、固定杆213和滑动组件214、第二升降臂22、升降前架23左滑杆231、右滑杆232、尼龙滑块233和后固定杆234、升降后架24;
夹持机构3、夹持固定架31、夹持滑动板32、夹持伸缩组件33、伸缩管331、固定管332、摩擦环334、夹持活动臂34。
具体实施方式
为了使本领域的技术人员可以更好地理解本发明,下面结合附图和实施例对本发明技术方案进一步说明:
需要说明,本发明实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若出现术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
另外,在本发明中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。
在本发明的描述中,除非另有明确的规定和限定,若出现术语“连接”等指示部件之间的连接关系,该术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个部件内部的连通或两个部件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
实施例一
如图1-6所示,一种用于酒店快捷送餐的机器人,包括移动机构1、升降机构2、夹持机构3,升降机构2设于移动机构1上方,夹持机构3底端与升降机构2顶端固定连接;
升降机构2包括第一升降臂21、第二升降臂22、升降前架23和升降后架24,升降前架23设于升降后架24前方,第一升降臂21与第二升降臂22均安装在升降前架23本体上,第一升降臂21设于第二升降臂22上方。
将餐具食物打包置入送餐箱内,重叠安放至升降机构2上,随后移动机构1通过预设送餐位置进行移动,当送餐机器人将送餐箱送至指定位置时,升降机构2将送餐箱向上移动,当送餐箱移动至配送位置时,夹持机构3将送餐箱进行夹持配送,通过第一升降臂21和第二升降臂22单独夹持升降,使送餐机器人容载量大幅度提升,在节省动力提高输送行程的基础上,最大化的提高配送效率。
第一升降臂21包括左臂211、右臂212、固定杆213和滑动组件214,左臂211设于固定杆213左端,右臂212设于固定杆213右端,滑动组件214设于固定杆213后方,且滑动组件214一端连接左臂211,滑动组件214另一端连接右臂212。
通过左臂211和右臂212对送餐箱两侧进行夹持,第一升降臂21夹持的箱体置于第二升降臂22上方,送餐箱箱体两侧设有配合左臂211和右臂212对应的凹槽,在左臂211和右臂212对送餐箱两侧进行夹持时,左臂211和右臂212卡入送餐箱箱体两侧的凹槽内,避免在送餐机器人送餐行进过程中侧翻,同时有效的避免了左臂211和右臂212在升降过程中由于送餐箱产生向下而导致第一升降臂21夹持松开导致送餐箱掉落的问题。
升降前架23包括左滑杆231、右滑杆232、尼龙滑块233和后固定杆234,尼龙滑块233设有两个,两个尼龙滑块233分别套设于左滑杆231、右滑杆232上。
通过尼龙滑块233与左滑杆231、右滑杆232的连接,使固定的稳定性好,减少左滑杆231、右滑杆232与部件之间的相互磨损,保证部件在尼龙滑块233上滑动时的滑动摩擦尽量小,同时尼龙滑块233能够保证部件在后固定杆234上滑动的滑动摩擦,使装置的损耗降低,更加耐用。
夹持机构3包括夹持固定架31、夹持滑动板32、夹持伸缩组件33和夹持活动臂34,夹持滑动板32固定于夹持固定架31前端,夹持滑动板32中段与夹持伸缩组件33尾端固定连接,夹持活动臂34后端与夹持滑动板32活动连接,夹持活动臂34中段与夹持伸缩组件33活动连接。
当第一升降臂21将送餐箱送至指定位置后,夹持滑动板32通过夹持固定架31下滑,夹持伸缩组件33向两侧伸出,使夹持活动臂34张开,夹持活动臂34对送餐箱进行夹紧,随后夹持滑动板32夹紧上升,同时夹持固定架31进行旋转对夹持滑动板32的角度进行调节。
实施例二
本实施例作为上一实施例的进一步改进,如图1-6所示,一种用于酒店快捷送餐的机器人,包括移动机构1、升降机构2、夹持机构3,升降机构2设于移动机构1上方,夹持机构3底端与升降机构2顶端固定连接;
升降机构2包括第一升降臂21、第二升降臂22、升降前架23和升降后架24,升降前架23设于升降后架24前方,第一升降臂21与第二升降臂22均安装在升降前架23本体上,第一升降臂21设于第二升降臂22上方。
将餐具食物打包置入送餐箱内,重叠安放至升降机构2上,随后移动机构1通过预设送餐位置进行移动,当送餐机器人将送餐箱送至指定位置时,升降机构2将送餐箱向上移动,当送餐箱移动至配送位置时,夹持机构3将送餐箱进行夹持配送,通过第一升降臂21和第二升降臂22单独夹持升降,使送餐机器人容载量大幅度提升,在节省动力提高输送行程的基础上,最大化的提高配送效率。
第一升降臂21包括左臂211、右臂212、固定杆213和滑动组件214,左臂211设于固定杆213左端,右臂212设于固定杆213右端,滑动组件214设于固定杆213后方,且滑动组件214一端连接左臂211,滑动组件214另一端连接右臂212。
通过左臂211和右臂212对送餐箱两侧进行夹持,第一升降臂21夹持的箱体置于第二升降臂22上方,送餐箱箱体两侧设有配合左臂211和右臂212对应的凹槽,在左臂211和右臂212对送餐箱两侧进行夹持时,左臂211和右臂212卡入送餐箱箱体两侧的凹槽内,避免在送餐机器人送餐行进过程中侧翻,同时有效的避免了左臂211和右臂212在升降过程中由于送餐箱产生向下而导致第一升降臂21夹持松开导致送餐箱掉落的问题。
升降前架23包括左滑杆231、右滑杆232、尼龙滑块233和后固定杆234,尼龙滑块233设有两个,两个尼龙滑块233分别套设于左滑杆231、右滑杆232上。
通过尼龙滑块233与左滑杆231、右滑杆232的连接,使固定的稳定性好,减少左滑杆231、右滑杆232与部件之间的相互磨损,保证部件在尼龙滑块233上滑动时的滑动摩擦尽量小,同时尼龙滑块233能够保证部件在后固定杆234上滑动的滑动摩擦,使装置的损耗降低,更加耐用。
夹持机构3包括夹持固定架31、夹持滑动板32、夹持伸缩组件33和夹持活动臂34,夹持滑动板32固定于夹持固定架31前端,夹持滑动板32中段与夹持伸缩组件33尾端固定连接,夹持活动臂34后端与夹持滑动板32活动连接,夹持活动臂34中段与夹持伸缩组件33活动连接。
当第一升降臂21将送餐箱送至指定位置后,夹持滑动板32通过夹持固定架31下滑,夹持伸缩组件33向两侧伸出,使夹持活动臂34张开,夹持活动臂34对送餐箱进行夹紧,随后夹持滑动板32夹紧上升,同时夹持固定架31进行旋转对夹持滑动板32的角度进行调节。
夹持伸缩组件33还包括伸缩管331与固定管332,在伸缩管331与固定管332之间安装一个摩擦环334,摩擦环334套接在伸缩管外侧,且摩擦环334与伸缩管331的外侧接触,使伸缩管331下滑伸缩时处于阻尼状态。
伸缩组件33由伸缩管331、固定管332及锁紧装置组成。固定管332收容伸缩管331,使伸缩管331可上下伸缩,锁紧装置套接在固定管332和伸缩管331的接口处周围,其包含锁紧旋钮及外壳,当锁紧旋钮旋紧时,伸缩管331相对固定管332静止,当锁紧旋钮打开时,伸缩管331相对固定管332呈下降运动。此外,锁紧装置的上端设置有与伸缩管331外侧相靠的上端滑块,且伸缩管331的下端设置有与固定管332内侧相靠的下端滑块,上端滑块和下端滑块可使伸缩管331在做伸缩运动时减少晃动。
摩擦环334的两端外径不一,且摩擦环334口径较小的一端与伸缩管331的外侧接触。
摩擦环334呈锥爪型,且摩擦环334的锥部朝向下方。
实施例二相对于实施例一的优点在于:在伸缩管331和固定管332之间安装一呈锥形的摩擦环,摩擦环334套接在伸缩管331的外侧,且摩擦环334的内侧表面与伸缩管331的外侧表面接触,当锁紧旋钮打开时,使伸缩管331下滑时与摩擦环334之间形成一定的滑动摩擦力,从而伸缩管331在下滑处于阻尼状态,下降的速度相应减慢。在此实施方式下,摩擦环334安装固定时其锥部301朝上或是朝下,都可在伸缩管331的下滑时提供一定的摩擦力,摩擦环334的锥部朝向下方,且其锥部紧靠伸缩管331的外侧,在摩擦环334的上端相连有一调节装置,该调节装置可为一滑块结构,优选为环状物,其内侧与外侧分别于伸缩管331的外侧、锁紧装置的内侧相靠;当锁紧旋钮松开后,伸缩管331向下运动,调节装置会受到向下的摩擦力,继而提供给锥爪型摩擦环334向下压紧的力时,摩擦环334的锥部会在定值口径的导向下向环中心靠拢来增加摩擦环334和伸缩管331的压力,从而增加了伸缩管331的滑动摩擦力,达到了在锁紧旋钮处于松弛状态时伸缩组件仍然处于一定的阻尼状态,避免伸缩组件迅速下落。
除此之外,也可在摩擦环334的根部内侧设置摩擦块,且摩擦块与伸缩管331外侧接触,当伸缩管331下滑时,摩擦环334受到伸缩管331提供的向下的摩擦力,以使摩擦环334的锥部的口径向摩擦环中心靠拢,进而增大与伸缩管331的阻尼。
上述的一种用于酒店快捷送餐的机器人的使用方法,包括以下步骤:
S1,设备安装:将升降机构2安装于移动机构1上方,随后将夹持机构3底端与升降机构2顶端固定连接,将升降前架23设于升降后架24前方,第一升降臂21与第二升降臂22均安装在升降前架23本体上,第一升降臂21设于第二升降臂22上方
S2,送餐上料:将餐具食物打包置入送餐箱内,重叠安放至升降机构2上,随后移动机构1通过预设送餐位置进行移动。
S3,食物配送:当送餐机器人将送餐箱送至指定位置时,升降机构2将送餐箱向上移动,当送餐箱移动至配送位置时,夹持机构3将送餐箱进行夹持配送。
上述的使用方法,S2又包括:
S2-1,送餐箱夹持:通过左臂211和右臂212对送餐箱两侧进行夹持,所述第一升降臂21夹持的箱体先堆叠置于第二升降臂22上方;
S2-2,夹持上升:在具体夹持上升时,滑动组件214通过带动左臂211和右臂212通过设于固定杆213上的滑轨向内滑动,对送餐箱进行夹紧,通过外部电机随后带动左滑杆231与右滑杆232连接后固定杆234所使用的尼龙滑块233对第一升降臂21进行上下滑动,使送餐箱对准送餐位置。
S3又包括:
S3-1,送餐夹紧:当第一升降臂21将送餐箱送至指定位置后,夹持滑动板32通过夹持固定架31下滑,夹持伸缩组件33向两侧伸出,使夹持活动臂34张开,夹持活动臂34对送餐箱进行夹紧,随后夹持滑动板32夹紧上升,同时夹持固定架31通过设于移动机构1的旋转台进行旋转对夹持滑动板32的角度进行调节;
S3-2,送餐释放:当送餐箱移动至指定位置,夹持伸缩组件33向两侧收回,夹持活动臂34对送餐箱进行释放,随后夹持滑动板32夹紧下降,将送餐箱放置指定位置。
以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本申请给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本申请的障碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。
- 一种用于酒店快捷送餐的机器人及其使用方法
- 一种适用于酒店使用的送餐机器人