用于组合式电容式触摸和力感测的触摸面板
文献发布时间:2023-06-19 12:24:27
技术领域
本发明涉及一种用于组合式电容和力感测的触摸面板。
背景技术
具有力感测能力的触摸屏面板可以通过三维多点触摸交互增强用户体验。
在触摸面板中,驱动和感测电极用于投射电容式触摸检测。为了增加力检测能力,采用了压电层、电极(其可以是驱动或感测电极)和保持处于固定电压或接地的对电极。可以包括附加介电层(诸如PET薄膜)、粘合剂和盖玻璃,以集成层并提供机械稳健性。传感器堆中层的配置共同限定传感器架构。
WO 2016/102975 A1中描述了将电容感测与基于压电的力检测能力相结合的触摸传感器的示例。此文献还描述了嵌入式触摸面板(其中电极散布有显示元件诸如偏振器等)的示例,其中图案化电极定位于用户输入表面与驱动和感测电极之间。WO 2017/109455 A1中描述了将电容感测与基于压电的力检测能力相结合的触摸传感器的其他示例。
发明内容
根据本发明的第一方面,提供一种用于组合式电容式触摸和力感测的触摸传感器,该触摸传感器包括多个第一电极和多个第二电极。第二电极与第一电极绝缘。第一电极和第二电极形成用于电容式触摸感测的网格。触摸传感器还包括透明盖。触摸传感器还包括布置在透明盖与第一电极和第二电极之间的透明压电膜。触摸传感器还包括设置在透明压电膜和透明盖之间的图案化对电极。图案化的对电极是由多个对电极线元件的组合形成的导电网格。对电极线元的间距大于第一电极和/或第二电极的间距。
对电极可以包括在第一方向上延伸的第一对电极线元件和在第二方向上延伸的第二对电极线元件。
对电极线元件的间距可以是第一电极和/或第二电极的间距的至少两倍。对电极线元件可以与第一电极和/或第二电极相关。对电极线元件可以与第一电极和/或第二电极不相关。
根据本发明的第二方面,提供一种用于组合式电容式触摸和力感测的触摸传感器。触摸传感器包括多个第一电极和多个第二电极。第二电极与第一电极绝缘。第一电极和第二电极被配置用于互电容式触摸感测。触摸传感器还包括透明盖。触摸传感器还包括堆叠在透明盖与第一电极和第二电极之间的透明压电膜。触摸传感器还包括堆叠在透明压电膜和透明盖之间的图案化对电极。图案化对电极是由多个对电极元件的组合形成的互连导电区域。对电极元件相对于第一电极和第二电极的横向位移被配置为使图案化对电极和第一电极之间或图案化对电极和第二电极之间的电容最大化。
第一电极和第二电极可以以基本上共面的配置设置。第一电极可以设置在第一平面中并且第二电极可以设置在平行于第一平面的第二平面中。横向位移是指平行于由第一电极和第二电极限定的一个或多个平面的位移。第一电极可以是用于电容式触摸感测测量的感测(或接收)电极,并且第二电极可以是驱动(或发送)电极。第二电极可以是用于电容式触摸感测测量的感测(或接收)电极,并且第一电极可以是驱动(或发送)电极。
图案化对电极可以包括对应于每个第一电极的对电极元件。
图案化对电极可以包括对应于每第N个第一电极的对电极元件,其中N为大于或等于二的整数。
图案化对电极可以包括对应于每个第二电极的对电极元件。
图案化对电极可以包括对应于每第M个第二电极的对电极元件,其中M为大于或等于二的整数。
图案化对电极可以形成在透明盖的第一表面上。第一表面可以面向透明压电膜。第一表面可以与透明压电膜直接接触。
对电极可以包括由在第一方向上延伸的多个第一对电极线元件和在第二方向上延伸的多个第二对电极线元件的组合形成的网格。
每个对电极元件的特征尺寸可以被配置为使得图案化对电极和第一电极之间的电容最大化,以保持每对第一电极和第二电极之间的互电容高于操作阈值。保持每对第一电极和第二电极之间的互电容高于操作阈值可以包括确保在第一电极和第二电极之间产生的电场充分投射到传感器上方以能够耦合到感测对象,例如用户的手指或导电触控笔。
特征尺寸可以是对电极线元件的宽度。
显示组件可以包括触摸传感器和包括像素阵列的显示器。每个对电极元件可以定位成覆盖形成像素阵列的像素之间的间隙。
根据本发明的第三方面,提供一种制造显示组件的方法,其包括接收包括像素阵列、多个第一电极和多个第二电极的显示面板,第二电极与第一电极绝缘,其中第一电极和第二电极被配置用于电容式触摸感测。该方法还包括接收压力感测组件,该压力感测组件包括具有第一面的透明盖和结合到第一面的透明压电膜,该第一面支撑图案化对电极,该图案化对电极呈由多个对电极线元件的组合形成的导电网格的形式。该方法还包括将压力感测组件结合到显示面板,使得压电膜堆叠在透明盖与第一电极和第二电极之间。该方法还包括将压力感测组件结合到显示面板,使得压电膜堆叠在透明盖与第一电极和第二电极之间。对电极线元件的间距大于第一电极和/或第二电极的间距。
根据本发明的第四方面,提供一种制造显示组件的方法,其包括接收包括像素阵列、多个第一电极和多个第二电极的显示面板,第二电极与第一电极绝缘,其中第一电极和第二电极被配置用于电容式触摸感测。该方法还包括接收压力感测组件,该压力感测组件包括具有第一面的透明盖和结合到第一面的透明压电膜,该第一面支撑图案化对电极,该图案化对电极呈由多个对电极线元件的组合形成的互连导电区域的形式。该方法还包括将压力感测组件结合到显示面板,使得压电膜堆叠在透明盖与第一电极和第二电极之间,并且对电极元件相对于第一电极和第二电极的横向位移被配置为使图案化对电极与第一电极之间或图案化对电极与第二电极之间的电容最大化。
根据本发明的第五方面,提供了一种优化用于组合式电容式触摸和力感测的触摸传感器的方法,触摸传感器包括:多个第一电极和多个第二电极,第二电极与第一电极绝缘,其中第一电极与第二电极被配置用于电容式触控感测;透明盖板;透明压电膜,其布置在透明盖与第一电极和第二电极之间;和图案化对电极,其设置在透明压电膜与透明盖板之间,其中图案化对电极是由多个对电极元件的组合形成的互连导电区域。优化触摸传感器的方法包括针对对电极元件相对于第一电极和第二电极的横向位移的范围,映射图案化对电极和第一电极之间的电容或者图案化对电极和第二电极之间的电容。优化触摸传感器的方法还包括确定对电极元件的最佳横向位移,该最佳横向位移使图案化对电极和第一电极之间的电容最大化。优化触摸传感器的方法还包括输出最佳横向位移。
映射可以通过针对横向位移的每个组合计算图案化对电极和第一电极之间的电容来执行。映射可以包括使用对应于规则间隔开的位置的横向位移。映射可以包括使用迭代搜索方法来确定最佳横向位移。映射可以包括使用对应于规则间隔开的位置的横向位移,然后是使用规则间隔开的位置中的最佳位置作为起始条件的迭代搜索方法。当第一电极和/或第二电极以周期性图案布置时,可以仅映射一个周期的横向位移。
优化触摸传感器的方法还可以包括使用最佳横向位移来制造触摸传感器。
优化触摸传感器的方法还可以包括使用最佳横向位移计算图案化对电极和第一电极之间的电容或者图案化对电极和第二电极之间的电容作为对电极元件特征尺寸的函数。优化触摸传感器的方法还可以包括使用最佳横向位移计算每对第一电极和第二电极之间的互电容作为对电极元件的特征尺寸的函数。优化触摸传感器的方法还可以包括确定特征尺寸的最佳值,该最佳值使图案化对电极和第一电极之间的电容值最大化,以保持每对第一电极和第二电极之间的互电容高于操作阈值。优化触摸传感器的方法还可以包括输出特征尺寸的最佳值。
当第一电极和/或第二电极以周期性图案设置时,可以仅考虑一个周期的第一电极和第二电极对。特征尺寸可以是对电极线元件的宽度。
优化触摸传感器的方法还可以包括使用最佳横向位移和特征尺寸的最佳值来制造触摸传感器。
附图说明
现在将参照附图通过示例的方式描述本发明的某些实施方案,在附图中:
图1是用于能够进行电容式触摸感测和压电力感测的触摸面板的触摸传感器的示例的截面视图;
图2是用于能够进行电容式触摸感测和压电力感测的触摸面板的触摸传感器的截面视图;
图3是图2所示的触摸传感器的平面视图;
图4示出了压电层和压电层两侧的电场的图;
图5是电荷放大器的示意性电路图和触摸传感器的等效电路模型;
图6是包括子单元的阵列和具有对于每一个子单元定位的对电极线元件的对电极的传感器的部分的第一配置的平面视图;
图7是子单元的阵列和具有对于每两个子单元定位的对电极线元件的对电极的第二配置的平面视图;
图8是图6所示第一配置的平面视图以及由于用户按压传感器而可以产生电荷的区域;
图9a是对于图6所示的第一配置的自电容与第四感测电极R
图9b是对于图6所示的第一配置的从第四感测电极R
图10是优选的第一配置的平面视图,在第一配置中,对电极线元件具有使自电容最大化的横向位移;
图11是感测电极Rx和驱动电极Tx之间的互电容作为相对于水平对电极线元件和竖直对电极线元件的横向位移的函数的曲线图;
图12是传感器的部分的放大平面视图,示出了在三个不同区域中负责感测电极Rx和驱动电极Tx之间的互电容的电场边缘线;
图13a是对于图7所示的第二配置的自电容与第四感测电极Rx
图13b是对于图7所示的第二配置的从第四感测电极Rx
图14是图7中所示的第二配置的平面视图以及由于用户按压传感器而可以产生电荷的区域;
图15a是从第三感测电极Rx
图15b是从第四感测电极Rx
图16是优选的第二配置的平面视图,在第二配置中,对电极元件具有使自电容最大化的横向位移;
图17是示波器的屏幕截图,示出了图1中所示触摸传感器的三个轻击(即用户致动)的电荷放大器输出;
图18是示波器的屏幕截图,示出了图2中所示触摸传感器的三个轻击的电荷放大器输出;
图19是包括能够进行电容式触摸感测的触摸传感器和能够进行压电力检测的力传感器的组件的截面视图;
图20是包括显示面板像素的阵列和插入在像素之间的非透明对电极线元件的传感器的部分的平面视图;
图21是对于图6所示的第一配置的第四感测电极Rx
图22绘制了对于图6所示的第一配置的第三感测电极Rx
图23是对于图6所示的第一配置的感测电极Rx和驱动电极Tx之间的互电容作为水平对电极线元件和竖直对电极线元件的宽度的函数的曲线图;以及
图24是优化触摸传感器的方法的过程流程图。
具体实施方式
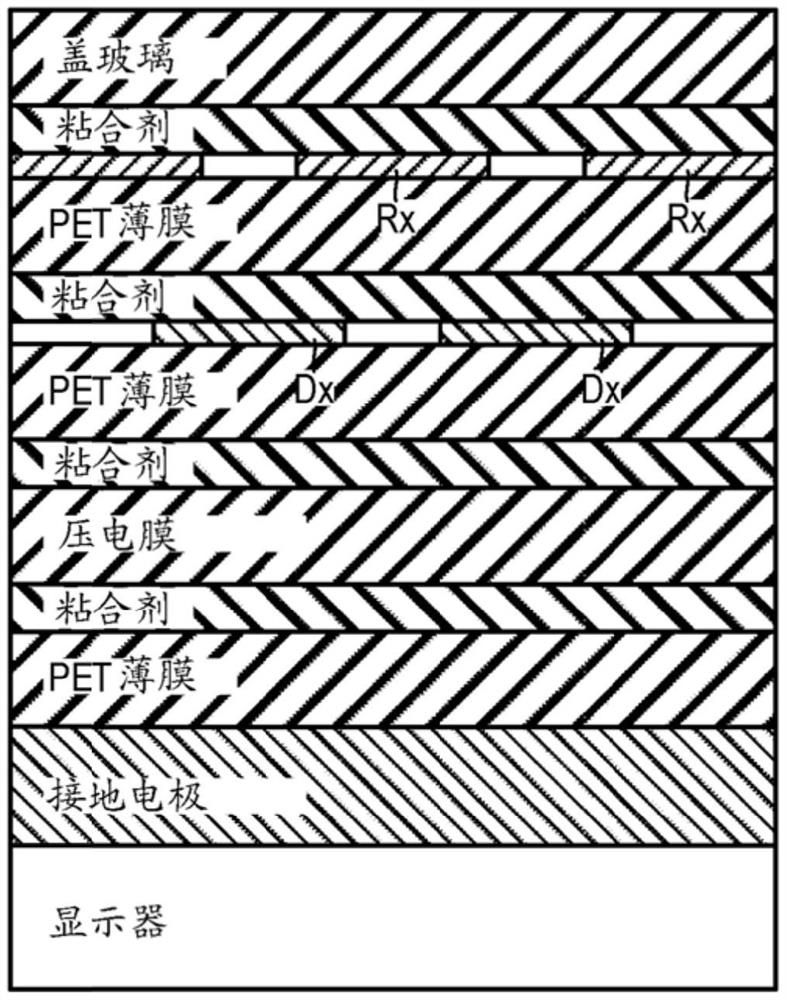
参考图1,示出了能够基于压电效应进行电容式触摸感测和检测施加的力的传感器架构的示例。驱动电极Tx、感测电极Rx和对电极CE由具有通常小于150Ω/□的薄层电阻的透明导电材料(诸如氧化铟锡(ITO))制成,透明导电材料沉积在透明电绝缘膜(诸如聚对苯二甲酸乙二醇酯(PET))上。
投射电容(或“PCAP”)触摸感测使得能够检测用户手指的位置。信号被施加到驱动电极,并且当用户触摸屏幕时,耦合到感测电极的电荷发生变化。因此,驱动电极和接收电极之间的互电容发生变化,这是由触摸控制器集成电路(IC)测量的。
用户施加的力被检测为薄膜压电行为的结果,由此机械应力引起净电荷。为了捕获到这一点,电极设置在压电膜的相对侧上,即驱动电极或感测电极在一侧上,并且对电极在相对侧上。选择使用驱动电极还是感测电极是基于哪个电极更靠近传感器架构中的压电膜。来自力感测电极的信号被馈入电荷放大器,并且输出用于评估用户的力输入。
在典型的传感器中,感测电极和驱动电极采用菱形图块的形式,这些菱形图块互锁镶嵌以形成二维阵列。如果使用,对电极采用由透明导电材料(诸如ITO)形成的非图案化导电层的形式。
从传感器架构(诸如图1中所示的示例传感器架构)读出力和电容的功能可以使用合适的电子器件来执行,例如,如WO 2016/10297 A1第46页第23行至第54页第28行和图21至图29中所述。
能够感测触摸感测和检测施加的力的传感器架构(诸如图1中所示的架构)可能具有一个或多个缺点。
首先,由于存在多个膜和粘合剂层,形成用于组合式PCAP和力感测的传感器的层堆叠可能厚。例如,忽略盖玻璃和电极,如果每个介电层具有50μm的厚度,则图1中所示的传感器可具有400μm的厚度。
其次,不具有力感测能力的典型触摸传感器往往只具有驱动电极和感测电极。如果这些电极适用于力感测,则应添加压电膜和对电极。这需要传感器制造商进行的架构修改。此外,当显示单元与传感器集成时,必须改变中间步骤以适应压电和对电极层的要求。
最后,虽然WO 2016/10297 A1描述了在用户与驱动电极和感测电极之间放置图案化对电极,但此文献没有描述如何优化此类图案化电极的放置、尺寸或间距。此外,WO2016/10297 A1教导了图案化电极应布置成减小图案化电极与驱动电极/感测电极之间的电容的大小,以便更容易检测用户触摸的电容变化。此时,这被认为是重要的,以允许PCAP检测继续发挥作用,尽管存在对中间图案化电极的屏蔽效应。
本发明至少部分地基于发明人的出乎意料的发现,即可以在不需要使图案化电极和驱动电极/感测电极之间的电容最小化的情况下保持PCAP功能。虽然使此电容最小化可以改善PCAP检测,但也可能降低力感测性能。出乎意料的是,发明人发现,通过仔细优化图案化对电极的放置、尺寸或间距以及适当选择触摸面板层结构,图案化对电极和驱动电极/感测电极之间的电容可以被最大化以改进力检测,而不显著降低PCAP性能。实际上,这表示与WO 2016/10297 A1关于图案化对电极的特定相对放置的教导相反。
参考图2和图3,示出了用于显示器2的触摸传感器1。触摸传感器1能够感测触摸并检测由用户(未示出)直接用手指或拇指(未示出)或间接例如使用笔或触控笔(未示出)施加的从而按压传感器1的力。取决于触摸传感器1的机械支撑,显著的面内应变也可能在包含在触摸传感器中的压电膜3内发展。
触摸传感器1具有在本文中被称为“on-cell”的架构。如下文清楚地所述,与例如具有诸如图1所示的架构的触摸传感器相比,on-cell架构可以有助于减小触摸传感器的厚度和/或复杂性。
触摸传感器1适用于基于压电效应的组合式电容式触摸和力感测。触摸传感器1包括多个第一电极4和多个第二电极5。第二电极5与第一电极4电绝缘。触摸传感器1还包括透明盖6,并且第一电极4和第二电极5被配置用于互电容式触摸感测以检测用户或导电触控笔与透明盖6的第一或输入表面7的一个或多个交互。透明压电膜3堆叠在透明盖6与第一电极4和第二电极5之间。触摸传感器1还包括设置在透明压电膜3和透明盖6之间的图案化对电极8。图案化对电极8采用由多个对电极元件9(例如形成导电网格或网的x对电极线元件10和y对电极线元件11)的组合形成的互连导电区域的形式。为了最大化压电电荷收集,对电极元件9相对于第一电极4和第二电极5的横向位移L被配置为使图案化对电极8和第一电极4之间的电容最大化。横向位移L是指与由第一电极4和第二电极5限定的一个或多个平面平行的位移。例如,对于图2所示的配置,横向位移是指所示的x方向上的位移L
替代地,第一电极4和第二电极5的作用可以颠倒,并且对电极元件9相对于第一电极4和第二电极5的横向位移L、L
例如,如图2的示例所示,触摸传感器1可以包括形成在主表面13上的堆叠层结构12,主表面是显示器2的旨在被用户(未示出)观看的表面(“上表面”或“面”)。层结构12通常是透明的,从而允许用户(未示出)看到下面的显示器2。
层结构12包括以远离显示器2的顺序(沿着所绘制的z轴)堆叠的:第一透明电绝缘膜14,其具有主表面15;第一电极4,其呈直接设置在第一电绝缘膜14的主表面15上的第一组透明、图案化、共面的电极4的形式(在图2和图3所示的示例的上下文中也称为“驱动电极”);第一透明粘合剂层16(在本文中也称为“光学透明粘合剂”或“OCA”);第二透明电绝缘膜17,其具有主表面18;第二电极5,其呈直接设置在第二电绝缘膜17的主表面18上的第二组透明、图案化、共面的电极5的形式(在本文中也称为“感测电极”);第二透明粘合剂层19;透明压电薄膜3,其具有主表面20;第三透明粘合剂层21;图案化对电极8,其呈第三透明网格状对电极8(或“公共电极”)的形式;和透明盖6(本文称为“盖玻璃”),其具有相对的第一表面7和第二表面22。第一或用户输入表面7(或“上表面”或“面”)旨在面向用户(未示出)并且是接收用户输入的表面。第二表面22(或“下表面”或“下侧”)面向层结构12的其余部分并且可以直接支撑网格状对电极8。例如,图案化对电极8可以形成在面向透明压电膜3并且与用户输入表面7相对的第二或下表面22上。第二表面22可以与透明压电薄膜3直接接触,或者可以存在中间层(诸如粘合剂层21)。
第一电绝缘膜14和第二电绝缘膜17由聚对苯二甲酸乙二醇酯(PET)制成,但也可以使用其他合适的薄的、柔性的和绝缘的塑料材料。
第一电极4、第二电极5和对电极8由氧化铟锡(ITO)或氧化铟锌(IZO)制成,但也可以使用其他导电材料,诸如铝、铜、银或其他金属。第一电极4、第二电极5和第三电极8可以由导电聚合物形成,诸如聚苯胺、聚噻吩、聚吡咯或聚(3,4-乙烯二氧噻吩)聚苯乙烯磺酸(PEDOT/PSS)。第一电极4、第二电极5和对电极8可以由金属网、纳米线(诸如银纳米线)、石墨烯或碳纳米管形成。第一电极4和第二电极5典型地将由相同的材料形成。然而,对电极8不必由与第一电极4和第二电极5相同的材料制成。例如,第一电极4和第二电极5可以由ITO形成,并且第三电极8可以由金属纳米线或金属网形成。
压电膜3优选地由诸如聚偏二氟乙烯(PVDF)的压电聚合物形成。然而,压电膜3可以由诸如锆钛酸铅(PZT)的压电陶瓷形成。
触摸传感器1的架构可以描述为具有两个电绝缘层14、17和一个压电层3的玻璃-膜-膜-膜(GFFF)架构。压电层3位于第一组电极4和第二组电极5上方,第一组电极和第二组电极可以分别用作驱动电极(本文也称为“Tx电极”或简称为“Tx”)和感测电极(本文也称为“Rx电极”或简称为“Rx”)。替代地,第一电极4和第二电极5可以分别用作Rx电极和Tx电极。这种布置,即压电层3位于第一组电极4和第二组电极5上方(更靠近用户输入表面7)可以更容易地将压电层3集成到现有的非力感测触摸传感器架构中。
图2和图3所示示例的网格状对电极8(也称为“公共电极”、“对电极”或“网格”)包括呈垂直的第一组对电极线元件10和第二组对电极线元件11形式的对电极元件9。第一组对电极线元件10和第二组对电极线元件11形成作为单个导电区域的对电极8。对电极线元件10、11具有厚度w(其优选地在10和500μm之间的范围内)和间距p
在图1所示的示例中,第一电极4设置在第一x-y平面内,并且第二电极5设置在与第一x-y平面平行的第二x-y平面中。然而,在其他示例中,第一电极4和第二电极5可以以基本上共面的配置设置,例如其中第一电极4和第二电极5基本上在一个x-y平面中。此类共面配置要求第一电极4或第二电极5包括跳线或类似结构以防止在第一电极4和第二电极5的相交处短路。
在图3所示的示例中,图案化对电极8包括对应于每个第一电极4的对电极元件9、10,并且类似地包括对应于每个第二电极5的对电极元件9、11。然而,对电极元件9、10、11与第一电极4和第二电极5的一一对应不是必要的,并且在一些其他示例中,图案化对电极8可以包括对应于每第N个第一电极4的对电极元件9、10,其中N是大于或等于二的整数。类似地,在一些示例中,图案化对电极8可以包括对应于每第M个第二电极5的对电极元件9、11,其中M是大于或等于二的整数。对电极元件9、10相对于第一电极4的间距p
还参考图4,可以使用触摸传感器的简化模型23来帮助理解对电极8(图3)的作用。
当施加力时,压电膜可以被认为产生具有相反极性的两个电荷板。压电层3是压电膜的示例。电荷的分布在电荷之间的空间中产生势场。假设两侧的电荷密度为σ和-σ(C.cm
由于压电膜的厚度d远小于电荷板的面积,因此可以使用无限平面近似来近似势场。压电区域两侧的第一区域I和第二区域II的电势是均匀的并且分别等于V
ΔV=V
其中d是压电膜的厚度,并且ε是其介电常数。
为了感测压电膜产生的电荷,电极放置在势场中。在理想情况下,只有将电极放置在第一区域I和第二区域II中时才能感测到电荷,因此该区域为导电区域。
电极E
Qc=C
应增加收集的电荷Qc以提高传感器的灵敏度。这可以通过增加电容C
还参考图5,响应于压电层3产生应变的触摸传感器1(图2)的输出可以建模为与电容C
I
其中I
图5所示电路的频域传递函数可以推导为:
H(ω)=V
其中R
V
并且,在时域中,应遵循:
V
其中u(t)是阶跃函数,以t=0为中心。将公式(2)中的Qc代入,得到以下结果:
V
其中公式(2)中的C
再次参考图2和图3,可以构建静电模型来表示触摸传感器1。模型中使用的材料的相对介电常数和电导率的值列于下表I中:
表I
还参考图6和图7,模型23
对电极元件9的两种不同配置27
还参考图6,第一配置27
还参考图7,第二配置27
自电容C
第一配置
可以仿真感测电极25的自电容C
还参考图8,所产生的电荷30的区域被建模为直径α=8mm的圆形,并且表示人类手指在传感器上的单个触摸/推动区域。电荷密度设置为10pC mm
还参考图9a,当其顶部没有水平对电极线元件28
还参考图9b,可以观察到,第四感测电极Rx
第一配置27
还参考图10,为了使优化的第一配置27*
通过对电极8的元件9(例如对电极线元件28
互电容是由于驱动电极25和感测电极26的重叠区域以及由于在驱动电极25和感测电极26的相邻边界(或“界面”)处产生的边缘场而产生的电容之和。
还针对图6中所示的第一配置23
参考图11,示出了作为水平对电极线元件28
还参考图12,对于包括子单元24的区域,示出了感测电极4和驱动电极5之间的第一区域A、第二区域B和第三区域C。第一区域A位于相邻的驱动电极25和感测电极26之间(“相邻的边界区域”)。第二区域B位于感测电极25与驱动电极26交叉的位置(“交叉区域”)。第三区域C位于两个驱动电极26之间以及两个相邻的感测电极25之间的空隙(“空隙区域”)中。
交叉区域B具有最强的边缘场,其次是相邻的边界区域A,然后是空隙区域C。当接地线(例如水平对电极线元件28
如果考虑水平对电极线元件28
第二配置
发明人出乎意料地发现,对电极线元件10、11(例如形成网格状对电极8的水平对电极线元件28和竖直对电极线元件29)的间距p
相对稀疏的对电极8的对电极元件9相对于第一电极4和第二电极5的相对定位可以以与在对电极元件9与第一电极4和第二电极5之间具有一对一对应的对电极8类似的方式进行优化。
例如,再次参考图7,对于对电极线元件28
还参考图13a,当在其顶部没有竖直对电极线元件29
还参考图13b,第四感测电极25(Rx
还参考图14,类似于图8所示的产生电荷的区域30被示出用于与第二配置27
还参考图15a和图15b,示出了移位对电极8的线元件28
图15a和图15b中所示的行为与图13和13b中所示的行为相同。这并不意外,因为由感测电极25收集的电荷与其自电容成比例(如公式(2)),电荷进一步与感测电极25和对电极线元件28
为了帮助克服电荷收集中的这种不规则性,可以将两个相邻的感测电极25组合成一个通道以使净均匀性最大化。例如,通过将相邻的感测电极25连接到单个电荷放大器的输入,该电荷放大器被配置为对输入电荷求和。
还参考图16,示出了优化的第二配置27*
此结果可以外推到水平对电极线元件28和竖直对电极线元件29的甚至更稀疏的布置。如果对电极线元件28、29的间距大于一个子单元24,则对电极线元件28、29应布置为至少经过感测电极25的菱形区域的中间,以使自电容C
还参考图17,示出了第一示波器描迹的屏幕截图。该描迹示出了电荷放大器输出响应于图1中所示触摸传感器(即没有对电极8的触摸传感器)的三个轻击(即用户致动)的响应。
参考图18,示出了第二示波器描迹的屏幕截图。该描迹示出了电荷放大器输出响应于图2中所示触摸传感器(即,具有对电极8的触摸传感器1)的三个轻击的响应。
在力检测方面,来自电荷放大器的输出指示所获得信号的质量。对于这些测量,投射电容式触摸感测信号被禁用以仅获得力信号。
这两个触摸传感器都产生高质量的信号,其峰间电压分别为287.5mV和352.5mV。对于根据本说明书的on-cell架构(图18),信号的幅值更大,因为力感测电极5的自电容C
两个不同传感器的信号具有相反的极性。这是因为用于两个传感器的透明压电膜3和接地层配置相对于彼此相反。换言之,在图1传感器中,顺序是接地、压电、感测电极,而在如图2所示的根据本说明书的触摸传感器1的示例中,顺序是第二(感测)电极、压电膜3、对电极8。两个传感器的压电膜3的相对极化方向相同。
因此,on-cell架构提供了高质量的力信号,其中压电层在触摸感测电极上方,并且on-cell架构集成到现有的触摸屏面板中变得可行。
参考图19,示出了用于显示器32的触摸传感器31的示例。触摸传感器31具有与上文描述的相似的on-cell架构。
触摸传感器31包含非力感测触摸面板33,该触摸面板包括:玻璃基板34(或“TFT玻璃”);像素阵列35,其可以包括LCD、OLED或其他像素;封装层36;和第一电极4和第二电极5,其呈共面驱动电极37和感测电极38的形式。非力感测触摸面板33具有主表面39。
触摸传感器31包括力感测层结构40,力感测层结构使用光学透明粘合剂层41胶合到非力感测触摸面板33。
力感测层结构40包括:压电膜3;透明对电极8,其呈网格状透明对电极42的形式;和透明盖6,其呈盖玻璃43(本文称为“盖玻璃”)的形式,该透明盖具有第一(用户输入)表面7、44和相对的第二表面45。盖玻璃43通过一层光学透明粘合剂46结合到压电膜3。
On-cell架构具有压电层3,压电层设置在非力感测触摸面板33的顶部。这提供了一种on-cell解决方案,其允许将力感测层结构40添加或合并到常规的触摸面板中。
在一般情况下,制造显示组件的方法可以包括接收显示面板,显示面板包括像素阵列35、多个第一电极4和多个第二电极5。第二电极5与第一电极4绝缘,并且第一电极4和第二电极5被配置用于电容式触摸感测。例如,显示组件可以采用非力感测触摸面板33的形式。
制造显示组件的方法还包括接收压力感测组件,该压力感测组件包括具有支撑图案化对电极8的第二面22的透明盖6。图案化对电极8采用由多个对电极元件9的组合形成的互连导电区域的形式。压力感测组件还包括结合到第二面22的透明压电薄膜3。例如,压力感测组件可以采用力感测层结构40的形式。
制造显示组件的方法接着是将压力感测组件结合到显示面板的步骤,使得压电膜3堆叠在透明盖6与第一电极4和第二电极5之间,并且对电极元件9相对于第一电极4和第二电极5的横向位移L被配置为使图案化对电极8和第一电极4之间或图案化对电极8和第二电极5之间的电容C
还参考图20,对电极元件9(例如对电极线元件10、11)可以与像素阵列35的显示面板像素48之间的间隙47对齐。因此,非透明材料(诸如金属网)可以用于对电极8而不影响显示质量。
形成网格或网形式的对电极8的水平和竖直对电极线元件10、11、28、29的宽度也可以被优化以使电容C
在根据优化的第一配置27*1的水平对电极线元件28
通过添加直径为8mm的产生电荷的圆形区域30(表示人类手指在传感器上的单次触摸/推动区域)(图8),还仿真了通过感测电极25、Rx
还参考图21,Rx
可以观察到,通过增加水平对电极线元件28
还参考图22,由Rx
可以观察到,如预期的,通过增加水平对电极线元件28
通过增加水平对电极线元件28
还参考图23,感测电极25和驱动电极26之间的互电容C
可以观察到,随着通过增加水平对电极线元件28
因此,水平对电极线元件28
包括对电极线元件10、11、28、29的给定触摸传感器1的最佳宽度w将取决于多种因素,包括电极4、5、28、29的形状和尺寸、对电极8的形状、对电极8相对于电极4、5、28、29的最佳横向位移L、L
修改
应当理解,可以对上文描述的实施方案进行各种修改。此类修改可以涉及在触摸面板及其组成部分的设计、制造和使用中已知的并且可以代替或补充本文已经描述的特征使用的等效和其他特征。一个实施方案的特征可以由另一实施方案的特征替换或补充。
图3中所示的对电极8的示例采用网格或网的形式,并且包括彼此垂直定向以形成方形网格的第一对电极线元件10和第二对电极线元件11。然而,对电极线元件可以以非垂直的角度相交,并且通常呈网格或网形式的对电极8可以由在第一方向上延伸的多个第一对电极线元件10、11和在第二方向上延伸的多个第二对电极线元件10、11的结合形成,第二方向不平行于第一方向。
已经给出了其中对电极8采用由垂直组的对电极线元件10、11、28、29形成的网格或网形式的示例。然而,形成对电极8的对电极元件9可以具有其他形状(无论是规则的还是不规则的)。重要的一点是优化形成对电极8的对电极元件9相对于电极4、5的横向位移L,以使用于感测压电感应的电荷的一个或多个电极4、5的自电容C
优选地,形成对电极8的对电极元件9可以具有与对应电极4、5相同或相似的形状。可选地,形成对电极8的对电极元件9的宽度w或其他特征尺寸也可以优化,以便确定不妨碍使用电极4、5的电容感测的最大宽度(或其他特征尺寸)。
已经在第一电极4和第二电极5的上下文中(例如具有大致菱形电极的感测电极25和驱动电极26以及由对电极线元件10、11、28、29的组合形成的对电极8)描述了优化触摸传感器1的方法。然而,上文概述的方案可以推广到任何几何形状的电极4,5和对电极元件9。该方法适用于任何触摸传感器1的优化,该触摸传感器包括第一电极4、第二电极5、透明盖6、布置在透明盖6与第一电极4和第二电极5之间的透明压电膜3以及设置在透明压电薄膜3和透明盖6之间的图案化对电极8。
优化具有一般布局的触摸传感器1的方法包括,针对对电极元件9相对于第一电极4和第二电极5的横向位移L的范围,映射图案化对电极8和第一电极4之间的电容C
基于映射,可选地包括用于微调的迭代搜索过程,可以确定对电极元件9相对于电极4、5的最佳横向位移L*(步骤S
然后可以采用最佳横向位移L*以使用最佳横向位移L*制造触摸传感器1。
在一般情况下,对电极元件9不需要是对电极线元件10、11、28、29,并且可以具有其他几何形状,诸如例如与电极4、5、25、26类似的菱形图案。如果电极4、5、25、26不是菱形图案,例如如果电极4、5、25、26采用z形、H形或已知用于电容感测的任何其他几何形状,则对电极元件9可以与一组或两组电极4、5、25、26共形。在此情况下,替代对电极线元件宽度w,每个对电极元件9的任何其他合适的特征尺寸可以被配置为具有最佳值,使得图案化对电极8与第一或第二电极4、5、25、26之间的电容被最大化,前提是保持每对第一电极4和第二电极5(例如感测电极25和驱动电极26)之间的互电容C
在实践中,将每对第一电极4和第二电极5之间的互电容C
优化触摸传感器1的方法可以扩展为包括对电极元件9的特征尺寸的优化(步骤S
在计算自电容C
输出最佳横向位移的步骤可以另外包括输出特征尺寸的最佳值(步骤S
然后可以采用最佳横向位移L*和特征尺寸的最佳值以便使用最佳横向位移制造触摸传感器1。
上文描述的第二配置27
通常,如果对电极线元件10、11的至少一些对电极线元件已经相对于第一电极4和/或第二电极5对准,则可以认为对电极线元件10、11与第一电极4和/或第二电极5相关。相比之下,如果对电极线元件10、11均没有相对于第一电极10或第二电极11对准,则可以认为对电极线元件10、11与第一电极4和/或第二电极6不相关。换句话讲,“不相关”对应于将相对稀疏的对电极8定位为大体上覆盖第一电极4和第二电极5,而不考虑第一电极4和第二电极5的精确位置。
尽管在本申请中已将权利要求表述为特征的特定组合,但应当理解,本发明的公开内容的范围还包括本文中明确或隐含地公开的任何新颖特征或特征的任何新颖组合或其任何概括,无论其是否涉及任何权利要求中当前所要求保护的相同发明,以及无论其是否减轻了与本发明相同的任何或所有技术问题。申请人特此告知,在本申请或从其导出的任何另外申请的申请期间,可以将新的权利要求表述为此类特征和/或此类特征的组合。
- 用于组合式电容式触摸和力感测的触摸面板
- 用于感测和扫描电容式触摸面板的方法和装置