一种座位自平衡的轮椅
文献发布时间:2023-06-19 12:29:04
技术领域
本发明应用于轮椅领域,提供了一种尤其适用于下肢残疾人及老年人的座位自平衡的轮椅,它能够使轮椅使用者在上下坡过程中保持座位水平稳定,使安全性、舒适性有显著提升。
背景技术
当前市面上存在的轮椅仅能够保证轮椅在上下坡过程中保证不发生倾仰,通过安全带的形式保证轮椅使用者在上下坡过程中出现下滑的情况。这种形式存在极大的安全隐患,并且对于轮椅使用者来说,舒适性大大降低。
目前已有的资料文献中,基本是通过调整轮椅底部的框架结构实现轮椅的自平衡功能,轮椅座位基本设置在一根单独的支撑杆上。通过传感器、控制板、电机实现轮椅的自平衡。现有技术对轮椅本身的结构做了较大的修改,用一个支撑杆支撑轮椅,大大影响了轮椅的安全性及稳定性,给轮椅使用者带来了安全隐患,不符合轮椅设计的基本原则。
同时,现有技术中忽略了轮椅的减震性,单一的轮椅支撑机构大大降低了轮椅的减震性能,轮椅在坑洼路段进行行进时可能会因为地面颠簸,对轮椅使用者造成安全隐患,尤其是对于高龄老人,减震功能至关重要。
发明内容
本发明提供了一款新型的座位自平衡的轮椅,实现轮椅在上下坡过程中的座位自平衡功能,提高轮椅的安全性,及轮椅使用者的舒适性。具体方案如下:
一种座位自平衡的轮椅,所述轮椅设有轮椅框架,在轮椅框架上设置有座椅,在轮椅框架上设有倾角传感器以及座椅姿态调节机构,座椅姿态调节机构根据倾角传感器感测到轮椅框架在前后方向上的姿态角来带动调节座椅在前后方向上摆动,以使座椅的座板始终在与地面平行;其中,
所述座椅姿态调节机构包含有两组分别安装在轮椅框架左右两侧的摆动装置,所述摆动装置由摆动块和直线驱动机构构成,摆动块一端铰接安装在轮椅框架上,另一端与直线驱动机构顶端的推杆铰接连接,直线驱动机构底部的缸座固定安装在轮椅框架上,座椅的座板下表面前侧与摆动块固定连接,且该座板与固定于轮椅框架左右两侧的连接杆铰接连接,直线驱动机构通过摆动块带动座板以连接杆为转动点前后摆动;
座板下表面后侧与安装在轮椅框架上的减震限位机构相连。
进一步的,轮椅框架设有在宽度方向上的前限位杆,该前限位杆位于座板下方的前侧,直线驱动机构底部的缸座通过轴承的方式固定在前限位杆上。
进一步的,轮椅框架设有在宽度方向上的后限位杆,该后限位杆位于座板下方的后侧,在后限位杆的上表面安装有一排减震限位机构,减震限位机构底部以轴承的方式连接在后限位杆,且减震限位机构顶端与座板下表面后侧固定连接。
进一步的,减震限位机构为弹簧或者减震缸。
进一步的,倾角传感器为双轴的倾角传感器。
进一步的,直线驱动机构为推杆电机或者油缸。
进一步的,直线驱动机构底端的嵌入式控制模块和倾角传感器通过I2C 通信装置传递信号。
进一步的,座板后侧设有角度可调的靠背。
本发明的自平衡轮椅能够实现轮椅在上下坡过程中座位的自平衡功能,提高了轮椅的安全性的同时解决了轮椅使用者出行的问题,提高了轮椅使用者的出行舒适性。从机械结构上来说,本发明机械结构稳定、简单、脱离人为控制,能够实现自动控制,方便快捷。从自动控制角度来说,结合传感器、嵌入式开发板,能够灵敏检测坡度并对电机进行有效控制,采用I2C通信提高了数据传输的稳定性和安全性。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
图1为一实施例中,本发明提供的一种座位自平衡的轮椅俯视图;
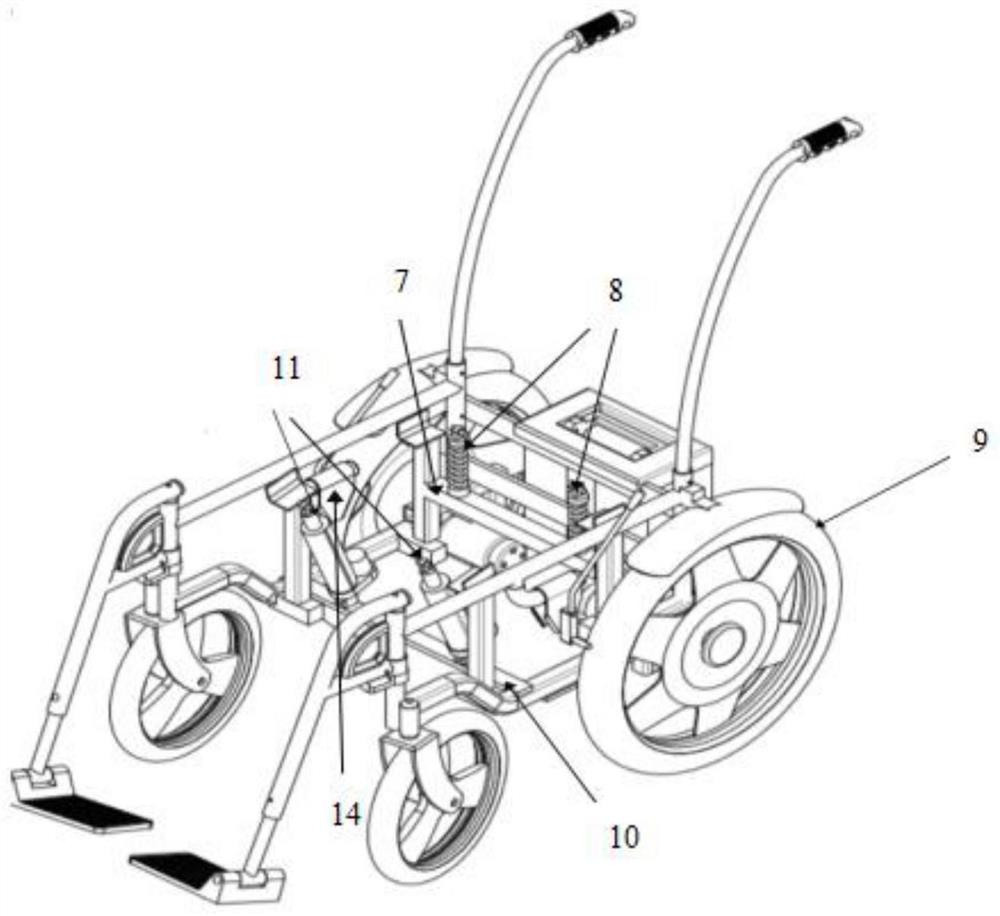
图2为本发明一种座位自平衡的轮椅的立体图;
图3为本发明一种座位自平衡的轮椅的侧视图;
图4为一实施例中,本发明实现座椅自平衡方式的工作原理流程图;
图5为本发明轮椅在上坡时,本发明的轮椅将座椅前部向下摆动使得座板与地面平行的示意图;
图6为本发明轮椅在下坡时,本发明的轮椅将座椅前部向上摆动使得座板与地面平行的示意图。
具体实施方式
在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
为了彻底理解本发明,将在下列的描述中提出详细的步骤以及详细的结构,以便阐释本发明的技术方案。本发明的较佳实施例详细描述如下,然而除了这些详细描述外,本发明还可以具有其他实施方式。
本发明提供了一种座位自平衡的轮椅,在现有的轮椅稍加改进实现了座位自平衡的功能,如图2所示,轮椅框架3结构与现有技术相差不大,在轮椅框架3上设置有座椅1,在轮椅框架3后部设置有动力轮9,前部设置转向轮以及脚踏板。
本发明在轮椅框架3上设有倾角传感器13以及座椅姿态调节机构,座椅姿态调节机构根据倾角传感器13感测到轮椅框架3在前后方向上的姿态角来带动调节座椅1在前后方向上摆动,以使座椅1的座板4始终在与地面平行。
如图2-图3所示,所述座椅姿态调节机构包含有两组分别安装在轮椅框架3左右两侧的摆动装置,所述摆动装置由摆动块14和直线驱动机构11构成,摆动块一端铰接安装在轮椅框架3上,另一端与直线驱动机构11顶端的推杆铰接连接,直线驱动机构11底部的缸座固定安装在轮椅框架3上,座椅1的座板4下表面前侧与摆动块固定连接,且该座板4与固定于轮椅框架3左右两侧的连接杆6铰接连接。由直线驱动机构11的推拉杆上下伸缩带动摆动块摆动,并由摆动块14带动座板4前端4以连接杆6为转动点做前后摆动进而调整座椅1在前后方向上的仰角(如图4-图5所示)。此外,在座板4后侧还与安装在轮椅框架3上的减震限位机构8相连,本发明通过直线驱动机构11运动,引起减震限位机构8运动,进而控制直线驱动机构 11的推拉杆伸缩限度,保证座椅安全平衡;并且减震限位机构8还可以起到一定的减震作用,提高了乘坐的舒适度。
在一可选的实施例中,如图2所示,轮椅框架3设有在宽度方向上的前限位杆10,该前限位杆10位于座板4下方的前侧,直线驱动机构11底部的缸座通过轴承的方式固定在前限位杆10上。作为优选项,直线驱动机构11 选用为推杆电机或者油缸。
在一可选的实施例中,如图2所示,轮椅框架3设有在宽度方向上的后限位杆7,该后限位杆7位于座板4下方的后侧,在后限位杆7的上表面安装有一排减震限位机构8,减震限位机构8底部以轴承的方式连接在后限位杆7上,且减震限位机构8顶端与座板4下表面后侧固定连接。进一步可选的,减震限位机构8为弹簧或者减震缸,优选采用成本较低的弹簧。由于弹簧的特性,只能被动控制,当轮椅1突然开始或停止不平衡运动时,弹簧受到形态的变化后,做出对轮椅座椅变化的限制,在直线驱动机构11以及弹簧的共同作用下实现座椅平衡,同时也能够实现在轮椅1停止状态下的座板 4的平衡。当轮椅1在不平路面时,椅座起伏颠簸,直线驱动机构11接受信号工作实现座椅前端高低调整,多组减震限位机构8限制座椅调整高度,从而实现轮椅座椅平衡。
在一可选的实施例中,倾角传感器13为双轴的倾角传感器。
在一可选的实施例中,直线驱动机构11底端的嵌入式控制模块12和倾角传感器13通过I2C通信装置传递信号,以保证数据传输的稳定性和安全性。
在一可选的实施例中,椅背2通过连接点5安装在座板4后方。为了满足不同乘客的习惯,靠背2的角度可以调整。
为了保证轮椅行动时的安全性及稳定性,本产品能够利用倾角传感器13 敏锐检测到车体座位结构的在前后方向上的微量改变,I2C通信传递信号能够保证安全性和准确性,嵌入式控制模块12控制直线驱动机构11的伸缩进而调节轮椅座板前端的高低变化,座板后侧由两组减震限位机构8限制座椅调整限度,不断地循环控制从而实现轮椅座椅自平衡,保证轮椅的行驶安全及动态平衡。
针对单一的轮椅支撑机构无法实现的减震性能,本产品的双直线驱动机构11控制的伸缩平缓调整轮椅座椅前端的变化,利用减震限位机构8本身易回弹可伸缩的特性保证轮椅座椅整体的动态平衡,在保证轮椅安全的情况下,也大大提高了轮椅的减震性能。
以上对本发明的较佳实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,其中未尽详细描述的设备和结构应该理解为用本领域中的普通方式予以实施;任何熟悉本领域的技术人员,在不脱离本发明技术方案范围情况下,都可利用上述揭示的方法和技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例,这并不影响本发明的实质内容。因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均仍属于本发明技术方案保护的范围内。
- 一种座位自平衡的轮椅
- 一种座位可升降的轮椅