通过超声波确定介质的修正图像的方法和用于实施该方法的设备
文献发布时间:2023-06-19 13:26:15
技术领域
本发明涉及用于提供粘弹性介质的图像的超声波成像方法和设备。该方法的目的尤其在于通过考虑超声波成像探头施加在介质外表面上的压力变化,来修正所产生的图像。
背景技术
更具体地说,本发明涉及一种使用超声波来观察扩散粘弹性介质的成像方法,该介质包含反射所述压缩超声波的颗粒。
通过该方法修正的图像可以是各种类型的。例如,图像可以是应变(英文为“strain”)类型的,或是弹性(英文为elasticity)类型的。
专利文献US 2005/252295提出一种弹性成像技术,其在介质中生成弹性剪切波,并通过记录介质的多个图像来观察该弹性剪切波的传播。然后确定介质的至少一个运动参数(位移、偏应变)的图像,并从图像中推导出剪切波的一个传播参数,例如剪切的速度、剪切模量、杨氏模量、剪切弹性等。
该最新技术被广泛应用。然而,已经观察到,运动参数的图像或剪切波传播参数的图像对于超声成像探头施加在介质表面上的压力敏感。而这种探头压力是由医生施加的,可能会在检查期间或在不同检查之间变化。实际上,医生会改变该外部压力以在相关图像中获得期望的观察。
此外,这些图像包括与所施加的外部压力的变化相关的应变,这在它们的表征、它们的可再现性和它们的确定中造成不精确性。
发明内容
本发明的目的在于完善该类型的成像方法,尤其是从而改善其图像。
为了该效果,本发明提出一种通过超声波确定介质的修正图像的方法,其特征在于:
-确定介质图像(I
-确定1至N中每个编号k的介质图像的运动,该运动是编号k的介质图像(I
-基于编号k的介质图像(I
-基于之前的各运动、即与编号为1至k的介质图像相关联的各运动,补偿所述偏应变图像(IΔε
-通过对编号为1至k的修正的偏应变图像(IΔε
借助于这些设置,确保所产生的图像得到修正。
在根据本发明的方法的各个实施方式中,还可以另外利用以下设置中的一个和/或另一个。
根据一个方面,确定编号k的运动通过以下实现:
-确定介质图像与前一介质图像之间的位移场,
-基于所述位移场,确定图像的几何转换,所述几何转换以数量小于十个的参数表征位移场。
根据一个方面,通过介质图像与前一介质图像之间的相互关联,或通过介质图像与前一介质图像之间的子图像跟踪算法,来计算位移场。
根据一个方面,跟踪算法是卢卡斯-卡纳德(Lucas-Kanade)算法。
根据一个方面,几何转换至少包括平移,或平移和位似(法语homothétie),或平移、位似和旋转。
根据一个方面,几何转换T
其中,几何转换T
Tx,Ty是平移系数,
Hx,Hz是位似系数,和
θ是垂直于图像平面的轴的旋转角度。
根据一个方面,通过基于位移场的点的集计算的参数群的中位数值获得几何转换的参数。
根据一个方面:
-集包括位移场的三个至十个点,并且
-群大于一百个集。
根据一个方面,所述方法另外还包括:
(e1)确定介质的弹性图像,和
(e2)通过基于之前的各运动,即与编号为0至k的介质图像相关联的各运动,补偿所述弹性图像,确定修正的弹性图像。
根据一个方面,通过以下子步骤生成在步骤(e1)中产生的弹性图像:
(e1.1)激励步骤,在其期间,通过发射至少一个聚焦超声波,在介质中生成剪切波,
(e1.2)观察步骤,在其期间,通过确定介质的中间图像的时间序列,观察剪切波的传播,j是0至M的中间图像编号,
(e1.3)处理步骤,在其期间,基于介质的所述中间图像和剪切波传播模型,确定弹性图像。
根据一个方面,另外还实施:
-确定多个修正的应变图像,
-确定多个修正的弹性图像,所述修正的应变图像和所述弹性图像在时间上交错,和
-基于多个修正的应变图像和多个修正的弹性图像,确定非线性参数的图像。
根据一个方面,通过数值对的应变线性回归,确定非线性参数的图像中每个像素的数值,每个对的第一数值对应于所述多个修正的应变图像之一的相同像素的数值,而该对的第二数值对应于所述多个弹性图像之一的相同像素的数值,所述多个修正的应变图像之一和所述多个修正的弹性图像在之一时间上相继或接近,并且其中,基于如下的应变与弹性之间的关系式,建立应变线性回归:
其中,
E是所考虑的修正的弹性图像中该像素的杨氏模量,
E
ln()是自然对数函数,
ε是所考虑的修正的应变图像中该像素的应变,和
A是通过所述应变线性回归确定的所述像素的非线性参数。
根据一个方面,另外还实施:
-通过将编号k的修正的偏应变图像和编号k的修正的弹性图像相乘,确定修正的偏应力图像的时间序列,
-通过对编号为1至k的修正的偏应变图像求和,确定修正的应力图像。
根据一个方面,另外还实施;
-确定多个修正的应力图像;
-确定多个修正的弹性图像,所述修正的应变图像和所述弹性图像在时间上交错,和
-基于多个修正的应力图像和多个修正的弹性图像,确定非线性参数的图像。
根据一个方面,通过数值对的应力线性回归,确定非线性参数的图像中每个像素的数值,每个对的第一数值对应于所述多个修正的应力图像之一的相同像素的数值,而该对的第二数值对应于所述多个弹性图像之一的相同像素的数值,所述多个修正的应力图像之一和所述多个修正的弹性图像之一在时间上相继或接近,并且其中,基于如下的应力与弹性之间的关系式,建立应力线性回归:
其中,
E是所考虑的修正的弹性图像中该像素的杨氏模量,
E
ln()是自然对数函数,
ε是所考虑的修正的应变图像中该像素的应变,和
A是通过所述回归确定的所述像素的非线性参数。
本公开还涉及一种成像设备,其包括适于实施如上所述的通过超声波确定介质的修正图像的方法的超声波探头和微型计算机。
附图说明
在以下参照附图对作为非限制性示例提供的各个实施方式的说明中,本发明的其它特征和优点将显现。
在附图中:
-图1是根据本发明的一种实施形式的超声波成像设备的示意图;
-图2A和2B示意性地示出介质图像在零外部压力的情况下与受到使得介质的外表面变形的外部压力的情况下之间的运动;
-图2C示意性地示出比图2B的运动更加复杂的运动,该运动包括旋转;
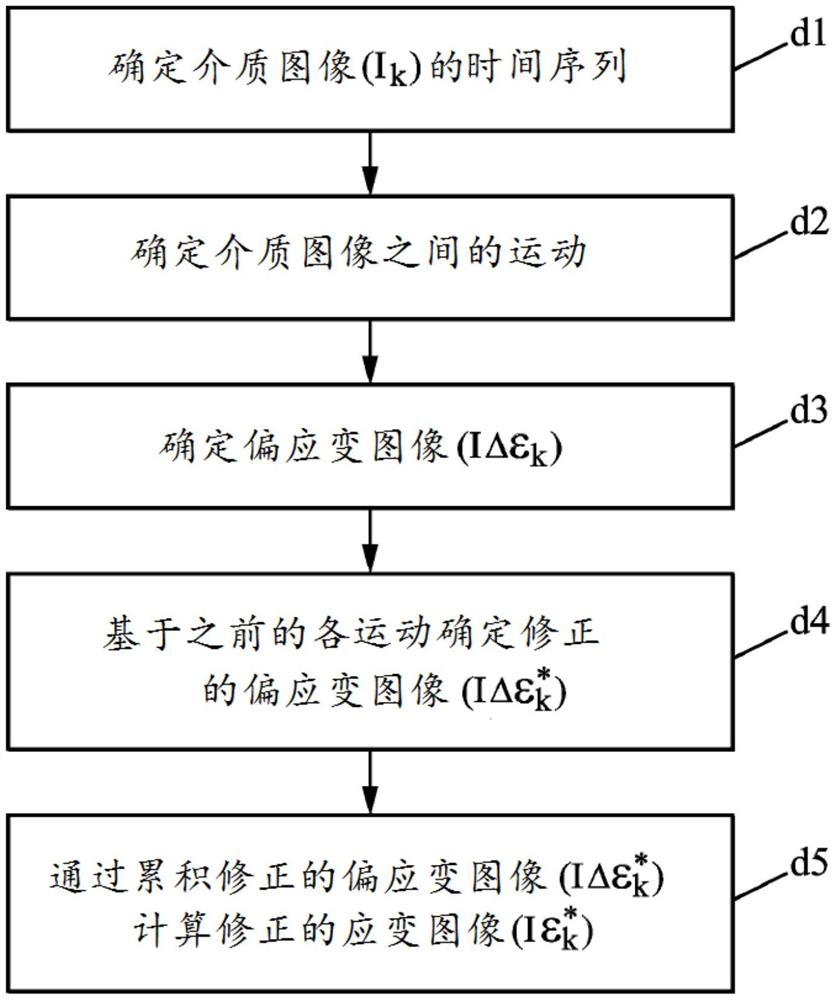
-图3是示出修正的应变图像的计算方法的一个实施形式的图;
-图4是示出用于确定修正的弹性图像的方法的图;
-图5是示出用于确定修正的非线性参数的图像的方法的第一实施形式的图;
-图6是示出实施图5的方法的示例的图;
-图7A是示出用于确定修正的应力图像的方法的图;
-图7B是示出用于确定修正的非线性参数的图像的方法的第二实施形式的图;和
-图8是示出实施图7B的方法的示例的图。
在示例性地提供的各个图中,相同的附图标记指示相同或相似的元素。
具体实施方式
图1所示的成像设备1旨在提供对于压缩超声波是扩散性的粘弹性介质2的图像,在医学应用情况中该粘弹性介质可以是活体,例如病人的身体部位(胸部、肝部、腹部等)。该成像设备1还能够研究弹性剪切波的传播以提供介质2的弹性图像。
例如通过将压缩超声波自介质外表面3发送到介质2中的微型计算机4或任何其它电子中央单元来产生介质图像,微信计算机4包括至少一个输入接口4b(例如键盘或其它输入接口)和输出接口4a(例如屏幕或其它输出接口),压缩超声波与包含在介质2中的扩散颗粒5相互作用,所述颗粒对于压缩超声波是反射性的。颗粒5可以由介质2的任何不均匀性构成,并尤其是当涉及医学应用时,由存在于人体组织中的胶原颗粒构成(这些颗粒在超声图像中形成被称作“散斑”的点)。
为了观察介质2并为了生成介质图像,使用布置为抵着被观察的介质2的外表面3的超声波探头6。该探头以例如0.5至100MHz的频率、优选地0.5至15MHz的频率、例如约为4MHz的频率,沿着Z轴发送压缩超声波脉冲,其类型是通常在超声图像中使用的。
超声波探头6由n个超声波换能器T1、T2、……、Ti、……、Tn的网络构成,n为大于1或至少等于1的整数。
例如,该探头6可呈可包括n=128个换能器的线性棒的形式,这些换能器例如沿着垂直于Z轴的X轴排齐。该探头也可以是换能器的二维网络(平面或非平面)。
换能器T1、T2、……、Tn可以由微型计算机4来彼此独立地控制,可能地通过包含在例如通过柔性线缆连接到探头6的电子机箱7中的中央单元CPU进行控制。由此,换能器T1至Tn能够选择性地发射:
-要么“平面的”压缩超声波(在此就是其波前沿在X,Z平面中为直的波)或照明介质2中的整个观察场的任何其它类型的非聚焦波,例如通过使得各个换能器T1至Tn发射随机声信号生成的波,
-要么聚焦在介质2的一个或多个点处的压缩超声波。
文献US 2009/234230提出一种合成成像技术,其使用多个非聚焦压缩波,例如具有不同角度的平面波类型的波,该技术组合这些平面波的返回波以便非常快速地获得介质的高质量图像。
为了生成介质图像(I),成像设备实施例如以下步骤:
(i1)微型计算机4使得探头6将至少一道非聚焦压缩超声波发射到粘弹性介质中,
(i2)微型计算机4使得探头6检测并实时记录从粘弹性介质2接收的声信号,包括由非聚焦压缩超声波通过与粘弹性介质的反射性颗粒5相互作用而生成的回音,和
(i3)处理步骤,在其期间,微型计算机4处理在子步骤(i2)期间从粘弹性介质2接收的声信号,以确定介质的一个或多个图像(I)。
非聚焦压缩超声波在介质2中以非常高的传播速度传播,例如在人体中速度约为1500m/s,并与反射性颗粒5相互作用,这生成信号的回音或其它类似干扰,其本身在超声成像领域被称作“散斑噪音”。
在非聚焦压缩超声波射出之后,这些“散斑噪音”被换能器T1、…、Tn在子步骤(i2)期间捕获。被每个换能器Ti这样捕获的信号si(t)首先被属于机箱7并连接到该换能器的分别为E1、E2、…En的取样器在高频率(例如30至100MHz)下取样并实时地数字化。
由此被取样和数字化的信号si(t)然后也实时地存储在属于机箱7并专用于换能器Ti的存储器Mi中。
每个存储器Mi例如具有约为128Mo的容量并包含所有接收到的信号si(t)。
在存储所有信号si(t)之后,通过对应于子步骤(i3)的传统光束(法语voies)形成过程,中央单元CPU使得属于机箱7的求和电路S再次处理这些信号(或CPU本身实施该处理或所述处理可以在微型计算机4中实施)。
由此生成信号S(x,z),这些信号每个对应于非聚集超声波射出之后的介质观察场图像。
例如,可通过以下公式确定信号S(t):
其中:
si是由第i号换能器在压缩超声波射出之后感知的原始信号,
t(x,z)是压缩超声波达到观察场的坐标为(x,z)的点所花的时间,其中,在声波射出开始时,t=0,
di(x,z)是观察场的坐标为(x,z)的点与第i号换能器之间的距离或该距离的近似,
V是压缩超声波在所观察的粘弹性介质中的平均传播速度,和
αi(x,z)是考虑切趾法的加权系数(在实践中,在许多情况中可视为αi(x,z)=1)。
当观察场是三维的(换能器是二维网络的)时,用空间坐标(x,y,z)代替平面(x,z)的空间坐标,可适应性地采用上述公式。
在可选的光束形成步骤之后,中央单元CPU在属于机箱7的中央存储器M中存储对应于最后一次射出的图像信号S(x,z)。这些信号也可存储在微型计算机4中以使得由它自己来实现对介质图像(I)的计算。
存在其它的生成介质图像(I)的技术,像合成成像技术。可使用允许获得介质图像的任何成像技术。优选地,使用允许快节奏地获得图像的技术。
根据本发明的成像设备1和方法实现介质图像的时间序列,以跟踪施加在外部面3上的外部压力P的变化。由此,考虑在相继时刻获得数量为N+1的介质图像,这些时刻不一定相隔恒定时长。由此可以用包括在0至N之间的图像编号k来标识介质图像。
因此将用标记I
该编号k将用于基于编号为k的介质图像和之前的介质图像确定的任何其它图像或量。该编号因此可用于表示与编号为k的该介质图像相关联的时刻。
此外,该图像序列的第一图像按常规标记为编号为0的介质图像。假设对于该第一图像,外部压力P微小或为零,并且其导致的外表面3的应变也微小或为零。该第一图像例如在图2A中示出。
图2A至2C示出本发明解决的问题。
在图2A中示出使用成像设备1,探头6在外表面3上施加微小或为零的外部压力P。外表面3保持大致水平(在X方向上)。介质图像I
在图2B中示出在图2A的时刻之后的某时刻使用成像设备1,其使用了大于P的外部压力P’,使得外表面3在方向Z上向介质2内变形。成像设备1产生具有与图2A中的产生的图像I
因此,在外部压力变化期间,由于所述介质2的弹性,介质的内部元素在介质图像中移位。由此,必须获悉这些整体的运动以实施对这些内部元素的特征的跟踪和精确分析。
图2A和2B的示例证明在方向Z上的平移可提供足够的修正。
在图2C中示出在另一时刻使用成像设备1,例如在比图2A和2B中所示出的之前的时刻更加靠后的时刻,其具有不同的外部压力P,尤其是探头6相对于竖直方向Z倾斜(该图2C中夸大了该倾斜)。外表面3在方向Z上变形并且它以角度Θ倾斜。成像设备1产生具有相同尺寸的介质图像I
由此,探头6在外表面3上的压力和位置的变化使得介质的内部元素在介质图像中移位,并且看起来必须获悉这些整体运动(相对于超声波非常慢)以实施对其跟踪和/或在获得的介质图像中对其补偿以实现对内部元素的特征的精确分析。
探头6可以可能地具有比Z方向上的平移或平移和旋转的组合更加复杂的位移。必需的修正运动则会更加复杂。本发明将在下文中解释如何确定这些运动的细节。
可通过关联处理介质图像(I
相互关联可例如在属于机箱7的专用电子电路DSP中实现,或在中央单元CPU或微型计算机4中为其编程。
在该相互关联过程期间,最大化相互关联函数 在现有技术中,尤其是在以下文献中,提供了这种相互关联计算的示例: -“Internal displacement and strain imaging using speckle tracking”,O’Donnell et al,IEEE transactions on ultrasonic,ferroelectrics,and frequencycontrol,第41卷,第3期,1994年5月,第314-325页, -“Elastography:a quantitative method for imaging the elasticity ofbiological tissues”,Ophir et al.,Ultrasonic imaging.,第13卷,第111-134页,1991年,和 -“Pyramidal Implementation of the Lucas Kanade FeatureTracker.Description of the algorithm.”,J-Y Bouguet,Intel Corp. 由此获得位移场,即介质2的每个位置(x,z)处的位移矢量或u(x,z,t)集合,通过用图像编号k代替时刻t的变量,可将其标记为u
该位移场(位移矢量集合)存储在存储器M中或微型计算机4中。 可构建位移场图像Iu
则可计算介质2的每个点处的偏应变(法语déformation partielle)Δε,其分量是位移矢量的分量分别对空间变量(在所考虑的示例中,沿着X、Z的坐标)求导的矢量,即:
可能地,根据一个实施例,仅计算Z方向上的单轴向偏应变/应变。实际上,与探头的外部压力相关的压缩主要在该方向上。类似地,在随后的应力计算中,可能地,仅计算Z方向上的单轴向偏应力/应力。由此简化计算。 像对位移矢量那样,可基于X-Z平面(图像平面)的坐标为(x,z)的每个点处计算的偏应变集合,来构建偏应变图像(IΔε 尤其是借助于微型计算机的屏幕4a,以减慢的视频的形式,可以将这些偏应变矢量或偏应变图像(IΔε
与施加在外表面3上的外部压力的变化相关的介质2的应变是缓慢、弹性且几乎均匀的应变。该应变在粘弹性介质2内传播并引起包含在介质2中的颗粒5和元素移位。 该移位不利于对介质图像的各个点的特征的分析,尤其是对这些点处的应变和/或这些点的弹性的评估。 本发明因此考虑修正图像以对这些运动进行补偿,这允许将介质2的内部颗粒和/或元素保持在图像中的恒定位置处,由此允许更精确地研究其特征。 可以认为由外部压力P引起的外部应变引起编号k的介质图像(I 则可通过编号k的介质图像与编号k-1的介质图像之间的位移场(u 特别地,可用编号k的几何转换T 由此,可通过应用之前的那些几何转换T 根据第一变型,几何转换T 根据第二变型,几何转换T 根据第三变型,几何转换T 由此,在X-Z平面(图像平面)中,几何转换可具有如下类型的矩阵形式:
其中,几何转换(Tk)的参数如下: Tx、Ty是图像平面中的平移系数, Hx、Hy是图像平面中的位似系数, θ是垂直于图像平面的轴的旋转角度。 由此,如果取坐标分别为(x1,z1)、(x2,z2)、(x3,z3)的图像的三个点P1、P2和P3,具有如下关系式:
其中: dx1=u dx2=u dx3=u 以重新采用点P1、P2和P3的位移矢量的X和Z分量的标记。 此外,有关系式可以基于前述矩阵A和B计算几何转换T T 应用该关系式可以基于三个点P1、P2和P3计算几何转换T 相反地,一旦建立几何转换T B=T 由此,可通过之前的几何转换的矩阵相乘,即通过编号i为1至k的几何转换T 用3个点建立的前述关系式可一般化至图像的点集,该点集包括图像的3、4、5或6个点。点集包括图像的三个至十个点。 此外,在一个变型中,有利地采用图像的三个点(点集)的群,所述群包括数量为Ng的点集,该数量数值大。例如,该群的大小、即点集的数量Ng大于一百。 由此,通过基于图像的点集的群计算的参数的中位数值,获得几何转换T 特别地,该技术可应用于位移场u 得益于使用了点集的群,可确定更整体性地代表编号k的介质图像与编号k-1的介质图像之间的运动的几何转换。 有利地,在图像中随机地选择每个集中的点。得益于该设置,可确定更整体性地并且更可靠地代表图像之间的运动的几何转换。
偏应变图像IΔε 通过对每个图像编号为k的偏应变图像IΔε 换句话说,修正的偏应变图像IΔε
通过累积相继的偏应变,获得应变ε
在本示例中,通过累积相继的修正偏应变Δε
可基于X-Z平面(图像平面)上坐标为(x,z)的任何点处计算的修正的应变ε 可以以减慢的视频的形式,可视化这些修正的应变图像Iε
简言之,根据图3所示的根据本发明的方法的第一实现形式,所实施的方法包括以下步骤: (d1)确定介质图像(I (d2)确定1至N中每个编号k的介质图像的运动,该运动为编号k的介质图像(I (d3)基于编号k的介质图像(I (d4)基于之前的各运动,即与编号为1至k的介质图像相关联的各运动,补偿所述偏应变图像(IΔε (d5)通过对编号为1至k的修正的偏应变图像(IΔε 图像的加和或累积指的是对所述图像中具有相同空间坐标的像素的数值求和(即彼此相加)以形成所得图像中对应像素的数值。 借助于这些设置,获得介质2的修正的应变图像Iε
文献US 2005/252295提出一种粘弹性介质2的弹性成像技术:成像设备1研究弹性剪切波在该介质中的传播。通过前述装置、尤其是微型计算机4,跟踪弹性剪切波的运动。 分多个步骤进行: (e1.1)激励步骤,在其期间,微型计算机4通过探头6将聚焦超声波发射到粘弹性介质中,使得在粘弹性介质2中生成弹性剪切波, (e1.2)观察步骤,在其期间,同时在粘弹性介质2的观察场的多个点处观察剪切波的传播,该步骤包括子步骤,在子步骤期间,生成在时间上相继的介质的多个中间图像II 例如通过前述的用于确定介质图像I 在步骤(e1)中发射的聚焦超声波的聚焦和时序以及在步骤(e2)中发射的非聚焦超声波的时序设置为使得非聚焦超声波在剪切波在观察场中传播时达到该观察场。由此,剪切波在所生成的介质的中间图像II 则进行: (e1.3)处理介质的中间图像以确定介质的弹性图像IE 例如通过前述关联或相互关联,处理介质的中间图像II 基于位移场或应变场,有利地,微型计算机4可然后进行制图步骤,在其期间,基于观察场中的运动参数(位移或偏应变)随时间的演变,要么在观察场中选定的某些点处,要么在整个观察场中,计算剪切波的至少一个传播参数。 则可构建弹性图像IE 尤其可通过微型计算机的屏幕4a将介质的该弹性图像IE 在制图步骤期间计算的剪切波的传播参数例如选自: -剪切波的速度Cs,或 -剪切模量μ,或 -杨氏模量E=3μ,或 -剪切波的衰减α,或 -剪切弹性μ1,或 -剪切粘性μ2,或 -介质的组织的机械放松时间τs。 例如,可计算观察场中不同点处的: -剪切波的速度Cs的数值,这提供组织的硬度, -组织的机械放松时间τs的数值,其表征介质的局部粘性。 为此,使用剪切波的传播模型,例如由如下的传播方程代表,由剪切波在介质的每个位置r处产生的位移遵循该传播模型:
其中: ρ是组织的密度, τS是组织的机械放松时间,和 cS是剪切波的速度,它通过以下关系式与组织的杨氏模量E直接相关:
用所有位移u对该传播方程求解就能获得上述传播参数(cS,τS)。 也可以采用其他变型来计算一个或多个传播参数。特别地,例如通过对频带上的数值取平均,可使用傅里叶域中的波方程。还可使用偏应变代替位移。 还可用不同的剪切波建立传播参数图、即弹性图像。则可将它们组合、例如通过对其取平均值,以获得更加精确的图。 剪切波在介质2中的传播速度足够大,大到可以视为在取得介质的多个图像(中间图像)以确定弹性图像IE(剪切波的传播参数)的过程期间,施加在外表面3上的外部压力P没有变化。由此,介质的这些图像不用通过介质的运动来修正。 相反地,介质的弹性图像IE
弹性图像IE 通过对每个图像编号k的弹性图像IE 换句话说,该方法包括以下步骤: (e1)确定弹性图像(IE (e2)通过基于与编号为1至k的介质图像相关联的之前的各运动补偿弹性图像(IE
在线性弹性域中,介质2的变形与应力σ成正比并遵循胡克定律: σ=E 其中: E ε是应变。 在非线性弹性域中,该正比例性不再成立。在大多数情况下,介质2的材料的杨氏模量E随着压缩增大而增大。 则定义弹性模量或杨氏模量E为应力-应变曲线的斜率,即:
其中: E是杨氏模量, Δσ是局部应力的变化,即偏应力, Δε是局部应变的变化,即偏应变。 弹性的非线性参数可以例如是在以下文献中提及的称作三阶剪切弹性模量的郎道系数A: -《Acoustoelasticity in soft solids:Assesment of the non-linear shearmodulus with the acoustic radiation force》,Gennisson et Al.,J.Acoust.Soc.Am(122),2007年12月,第3211-3219页,和 -《Quantitative Imaging of Nonlinear Shear Modulus by Combining StaticElastography and Shear Wave Elastography》,H.Latorre-Ossa et Al.,IEEETransactions on Ultrasonics,Ferroelectrics,and Frequency Control,第51卷,第4期,第833-839页。 特别地,该后一文献的方程(1)可重写成弹性(杨氏模量)E与应力σ之间的关系式(R1)的形式:
其中: E是杨氏模量或弹性模量, E σ是应力,并且例如是竖直方向Z的单轴应力σ A是所求的非线性参数。 通过前述关系式R1的求导,获得:
用方程(eq.1)的杨氏模量的定义除这个算式然后积分,获得弹性(杨氏模量)E与应变ε之间的关系式R2,即:
其中: E是杨氏模量, E ln()是自然对数函数, ε是应变,和 A是待确定的非线性参数。 根据图5所示的基于应变图像和弹性图像的方法的第一变型NLa,微型计算机4实施的方法另外还包括以下步骤: (NL1a)如前所述,确定多个修正的应变图像(Iε (NL2a)如前所述,确定多个修正的弹性图像(IE (NL3a)基于该多个修正的应变图像(Iε 实际上,通过图像中某像素的所有(多个)修正的应变和修正的弹性的数值,来确定该像素的非线性参数。 例如,通过该多个数值对的线性回归,来确定该非线性参数。下面将称该线性回归为应变线性回归。 对图像中某像素形成的每个数值对包括: -修正的应变图像中该相同像素的第一数值,和 -修正的弹性图像中该相同像素的第二数值,所考虑的修正的应变和弹性图像是在时间上相继的或在时间上接近的图像。这些图像可具有相同或接近的图像编号。 可能地,应变图像和弹性图像可以具有不同的图像编号,并且如前所述,必须采用编号对应于在时间上相继或接近的时刻的图像,也就是使得时间与所考虑的每个图像的编号对应。 图6示出对于图像中某像素的多个点Pa,每个点Pa对应于数值对(E 应变线性回归则使用弹性(杨氏模量)E与应变ε之间的关系式R2(eq.3):
其中,在本应用示例中,更具体地说: E是所考虑的修正的弹性图像中该像素的杨氏模量, E ln()是自然对数函数, ε是所考虑的修正的应变图像中该像素的应变,和 A是通过所述应变线性回归确定的所述像素的非线性参数。 对于从多个修正的应变图像(Iε 借助于这些计算,获得使用修正图像的介质2的非线性参数的图像INL 如图7A和7B所示,根据基于应力图像和弹性图像的方法的第二变型NLb,微型计算机4实施的方法包括: -第一阶段,在其期间,将偏应变图像转换成修正的应力图像,和 -第二阶段,在其期间,确定非线性参数图像。 在图7A所示的第一阶段期间,实施: (c1)通过将编号k的修正的偏应变图像(IΔε (c2)通过编号为1至k的修正的偏应变图像(IΔσ 图像相乘,在此指所述图像中具有相同空间坐标的像素的数值相乘(即彼此相乘)以形成所得的图像中对应像素的数值。在此,就用通过如图4所示的前述方法的各步骤计算的修正的弹性E 由此,通过以下算式计算图像的每个像素处的偏应力: Δσ 图像累积或加和是指对所述图像中具有相同空间坐标的像素的数值求和(即彼此相加)以形成所得的图像中对应像素的数值。 即:
在图像中所有像素处应用该公式以构建修正的应力图像(Iσ 在图7B所示的第二阶段期间,实施: (NLb1)确定多个修正的应力图像(Iσ (NLb2)确定多个修正的弹性图像(IE (NLb3)基于多个修正的应力图像(Iε 实际上,通过图像中某像素的所有(多个)修正的应力和修正的弹性的数值,来确定该像素的非线性参数。 例如,通过该多个数值对的线性回归,来确定该非线性参数。下面称该线性回归为应力线性回归。 对图像中某像素形成的每个数值对包括: -修正的应力图像中该相同像素的第一数值,和 -修正的弹性图像中该相同像素的第二数值,所考虑的修正的应力和弹性图像是在时间上相继的或在时间上接近的图像。这些图像可具有相同或接近的图像编号。 可能地,应力图像和弹性图像可以具有不同的图像编号,并且如前所述,必须采用编号对应于在时间上相继或接近的时刻的图像,也就是使得时间与所考虑的每个图像的编号对应。 图8示出对于图像中某像素的多个点Pb,每个点Pb对应于数值对(E 应力线性回归则使用弹性(杨氏模量)E与应力σ之间的关系式R1(eq.2):
其中,在本应用示例中,更具体地说: E是所考虑的修正的弹性图像中该像素的杨氏模量, E ln()是自然对数函数, ε是所考虑的修正的应变图像中该像素的应变,和 A是通过所述应力回归确定的所述像素的非线性参数。 对于从多个修正的应力图像(Iσ 借助于这些计算,获得使用修正图像的介质2的非线性参数的图像INL
- 通过超声波确定介质的修正图像的方法和用于实施该方法的设备
- 适用于确定介质内精确位置的物理特性的方法适用于确定介质图像的方法及其实施所述方法的装置