适于商用车自动驾驶的气动自动调压阀及其控制方法
文献发布时间:2023-06-19 13:27:45
技术领域
本发明涉及车辆制动技术领域,具体涉及一种适于自动驾驶的商用车电控气压制动系统自动调压阀及其控制方法。
技术背景
随着自动驾驶技术和无人驾驶技术的快速发展,已经有越来越多的车辆可以实现自动驾驶,而作为保证车辆安全行驶核心的制动系统,为了适应自动驾驶和无人驾驶的需求也逐渐向着自动化、智能化的电控气压制动系统发展。传统的气压制动系统以驾驶员为制动的控制核心,其响应速度受限于驾驶员的反应速度,同时由于系统本身固有特性,存在着响应时延较大,且无法实时精确的进行制动压力调节,已无法满足自动驾驶要求;电控气压制动系统是一种新型的可应用于自动驾驶车辆的制动系统,其可以根据车辆行驶工况,提出目标制动压力,并实时调节制动气室压力与目标压力一致,依靠制动系统自动完成智能制动,在保证车辆制动安全性的同时,可以实现稳定、舒适的制动。
传统气压制动系统受驾驶员控制,依靠踏板阀、ABS阀、继动阀等调压阀来实现制动,但是这些阀存在着调压精度低,响应速度慢,无法独立调压的问题,并且这些阀均为气动控制阀,无法满足电控气压制动系统要求,除无法满足制动安全性,稳定性及舒适性的要求外,更无法应用于自动驾驶车辆。目前,由于商用车体积较大,制动系统较为复杂,制动过程困难,因此针对商用车自动驾驶技术的研究较少,针对面向自动驾驶的商用车电控气压制动系统用自动调压阀的研究也较少。
发明内容
本发明要解决的技术问题是,针对现有技术存在的上述缺陷,提供一种适于商用车自动驾驶的气动自动调压阀及其控制方法,能够完全应用于自动驾驶车辆或无人驾驶,能够接受来自电控气压制动系统的信号,减少驾驶员对阀控系统的熟悉度依赖,快速、准确的调节制动气室的压力,与电控气压制动系统分析行驶工况后提出的目标压力相一致,保证制动过程的安全性、稳定性和舒适性。同时,电磁阀数量少且电磁阀结构得到改进,上阀体结构较简单,总体制造成本较低。
为解决上述技术问题,本发明采用如下技术方案来解决相关的技术问题:
一种适于商用车自动驾驶的气动自动调压阀,其特征在于:包括共同构成自动调压阀腔体的上阀体和下阀体,且所述自动调压阀腔体被活塞分为上方控制腔A和下方工作腔B;上阀体安装有高速进气阀组件和高速排气阀组件,下阀体安装有主阀芯组件;高速进气阀和高速排气阀在常规状况下处于关闭状态,且均设置为在接收来自控制器的信号后做出相应的动作,来调节控制腔A的气体压力,从而使工作腔B进气升压或排气降压,控制制动气室的压力。
按照上述技术方案,所述相应的动作包括以下一种:通过接通储气罐和控制腔A使控制腔A充气,或接通控制腔A和大气使控制腔A排气。
按照上述技术方案,所述高速进气阀和高速排气阀为在车辆不进行制动时均设置为失电关闭状态的常闭两位两通电磁阀;高速进气阀和高速排气阀均与控制器相连并受控制器控制而动作;高速进气阀和高速排气阀的铁芯中设有流道,流道外围具有凹槽,通过凹槽实现流道与上阀体上进气孔和出气孔的连接,进而实现气体的流通;电磁线圈嵌入铁芯中,动铁芯位于上阀体端盖中,上阀体端盖设有电磁线圈的接线孔。
按照上述技术方案,所述高速进气阀的进气口a与储气罐相连,出气口b连接下阀体控制腔A,当车辆进行制动时,高速进气阀动作,接通储气罐和下阀体控制腔A,使储气罐中的气体进入下阀体控制腔A;所述高速排气阀的进气口c连接下阀体控制腔A,出气口连接大气,车辆解除制动时,高速排气阀动作,将控制腔A中的气体排入大气,出气口处设有消声器;控制器通过控制高速进气阀和高速排气阀反复动作,来调节控制腔A的压力,进而调节制动压力。
按照上述技术方案,所述活塞上方具有导向装置和上阀体限位孔配合工作,保证活塞在竖直方向上运动,活塞下方的凸起与主阀芯组件形成线密封,保证密封性;所述主阀芯组件位于下阀体中,下阀体具有限位导向装置,保证主阀芯组件在竖直方向运动;活塞与主阀芯组件的回位弹簧共同控制主阀芯的运动。主阀芯组件与活塞接触处具有密封圈,保证密封性;主阀芯与活塞为可分离机构,且主阀芯内部为中空结构,可作为排气口实现排气。
按照上述技术方案,所述自动调压阀出气口下方具有压力检测口h,接压力传感器实时检测出气口气体压力,压力传感器信号会反馈给控制器,完成制动气室压力的闭环调节,最终实现制动压力的实时调节。
一种适于商用车自动驾驶的气动自动调压阀控制方法,其特征在于包括以下步骤:
(1)商用车电控气压制动系统检测车辆行驶工况,根据检测到的车辆行驶工况信息产生此时刻车辆制动气室的目标制动压力值p
(2)压力传感器检测所述自动调压阀出气口的压力p
(3)控制器将目标制动压力值p
(5)当p
(6)控制器通过控制高速进气阀和高速排气阀协调工作,调节自动调压阀出口的压力p
由此,本发明公开了一种面向自动驾驶的新型商用车电控气压制动系统用自动调压阀及其控制方法,包括上阀体和下阀体,上阀体主要包括高速进气阀和高速排气阀,下阀体的主要结构为继动阀。其中,高速进气阀的进气口a连接储气罐,出气口b连接下阀体控制腔 A的控制口;高速排气阀的进气口c连接下阀体控制腔的控制口,出气口d连接大气。下阀体的主要结构为继动阀,其中的活塞将腔室分为控制腔A和工作腔B两个独立的腔室,控制腔A有控制口;工作腔B有进气口e、出气口f和排气口g,进气口e连接车辆制动储气罐,出气口f连接车辆制动气室,排气口g连接大气,进气口和出气口,出气口和排气口之间均有阀门来控制其通断。在工作过程中,高速进气阀和高速排气阀接收来自控制器的控制信号,通过调节控制腔A内气体压力的大小,来控制活塞上下运动,以达到接通进气口和出气口或者接通出气口和排气口的目的,进而控制阀体出气口和车辆制动气室的压力;出气口处具有压力传感器实时检测气体压力,并将压力信号反馈给控制器,实现制动气室压力的闭环调节。该自动调压阀应用于自动驾驶车辆,自动化程度高,能够精确、高效、快速的完成自动驾驶车辆的制动过程,保证车辆制动的安全性和舒适性。
相对于现有技术,本发明具有以下有益效果:
(1)本发明面向自动驾驶,应用于商用车电控气压制动系统,能够提高车辆制动系统的自动化程度,由电控气压制动系统进行路况检测和分析后,控制所述自动调压阀完成制动,所述自动调压阀是实现车辆自动驾驶、无人驾驶的基础。
(2)本发明运用了高速电磁阀作为控制元件,控制气动回路的通断,可以大幅缩短气动管路的长度,减少气压制动系统的气体传输时延。
(3)本发明在所述自动调压阀出气口处设有压力检测装置,可以实时检测车辆制动压力,并将制动压力信号反馈给控制器,控制器可根据反馈信号对制动压力进行实时调压。
附图说明
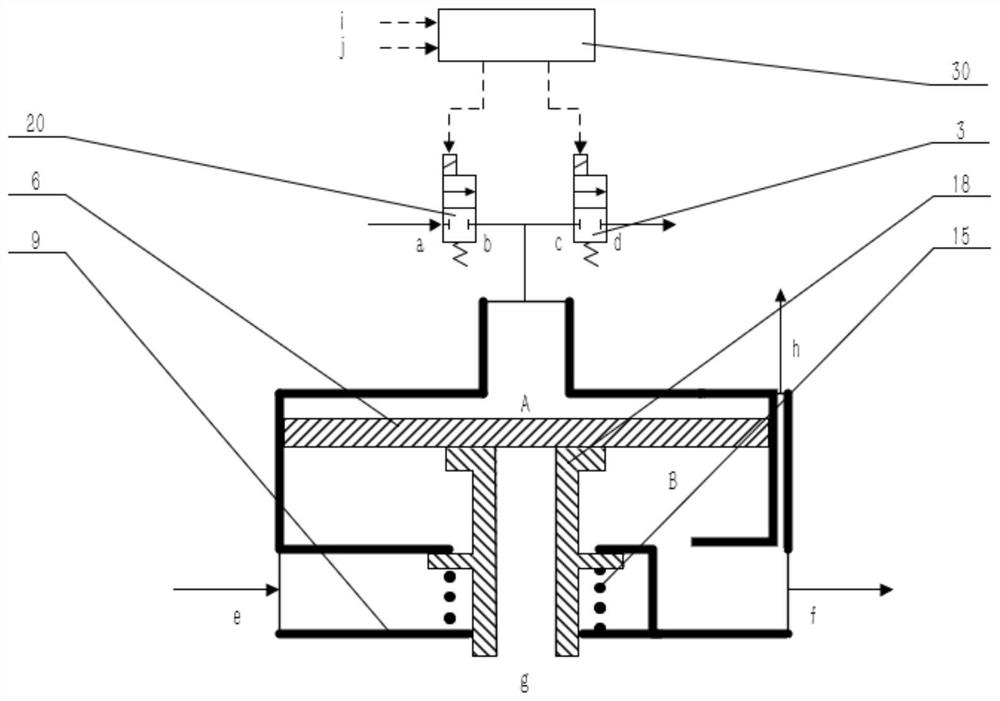
图1为本发明适于商用车自动驾驶的气动自动调压阀的原理简图。
图2为本发明适于商用车自动驾驶的气动自动调压阀的总体外观图。
图3为本发明适于商用车自动驾驶的气动自动调压阀及其控制方法的俯视图。
图4为本发明的右视图。
图5为图4中沿A-A线的剖视图。
图6为图5中结构Ⅰ的局部放大图。
图中各附图标记如下:1-上阀体端盖,2-上阀体零件,3-高速排气阀,4-消声器,5-堵头,6-活塞,7-活塞密封圈,8-阀体密封圈,9-下阀体零件,10-弹簧座,11-弹簧座密封圈,12-止动挡圈,13-橡胶消声器,14-主阀芯下密封圈,15- 主阀芯回位弹簧,16-主阀芯回位弹簧上挡圈,17-主阀芯中密封圈,18-主阀芯, 19-主阀芯上密封圈,20-高速进气阀,21-上阀体端盖密封圈,22-线圈,23-定铁芯,24-高速电磁阀阀芯下密封圈,25-高速电磁阀阀芯回位弹簧,26-高速电磁阀阀芯,27-高速电磁阀阀门密封圈,28-高速电磁阀阀芯上密封圈,29-衔铁,30- 控制器,a-高速进气阀进气口,b-高速进气阀排气口,c-高速排气阀进气口,d- 高速排气阀出气口,e-自动调压阀进气口,f-自动调压阀出气口,g-自动调压阀排气口,h-压力检测口,i-控制器电源接口,j-控制器信号接口,A-控制腔,B- 工作腔。
具体实施方式
下面结合附图和实施例对本发明进行详细的说明。
如图2-6所示,本发明为一种面向自动驾驶的商用车电控气压制动系统用自动调压阀,由上阀体和下阀体组成。上阀体的主体部分为上阀体外壳零件2,高速进气阀20和高速排气阀3通过上阀体零件上加工出的安装孔进行定位和安装,上阀体上加工有高速进气阀进气口a和出气口b以及高速排气阀的进气口c和出气口d,高速进气阀进气口a连接储气罐,出气口连接控制腔A,高速排气阀进气口c连接控制腔A,出气口d连接大气,高速排气阀出气口d处安装有消声器 4;上阀体零件上的出气口和进气口与高速进气阀20和高速排气阀3相连通,实现控制气动回路通断的作用。
上阀体零件上方具有端盖1,通过螺栓与上阀体固定在一起;端盖两侧具有高速进气阀和高速排气阀电控线束的连接孔,上阀体零件与上阀体端盖之间设有密封圈21。
所述自动调压阀运用高速进气阀20和高速排气阀3来实现控制腔A的压力,进而控制车辆制动压力;高速进气阀和高速排气阀安装在上阀体2中,与上阀体零件上加工的进气口和出气口完成控制气路通断的功能;所述高速进气阀20和高速排气阀3的结构相同,如图6所示,为高速进气阀20的局部放大图。高速进气阀20设有一体式的定铁芯23,定铁芯23上设有电磁线圈22的安装孔和电磁线圈22的接线孔,电磁线圈22安装在其中;定铁芯23设有气体流道,气体流道外围具有凹槽,凹槽与位于上阀体上的进气孔a连接,方便定位安装的同时也减小了气体传输的阻力;定铁芯23中心位置设有高速进气阀阀芯26的安装孔,可实现主阀芯的定位安装,定铁芯23下方与位于主阀芯上的高速电磁阀阀门密封圈27共同作用,实现阀门的功能,阀门密封圈27上下移动控制气路的通断;上阀体零件2与上阀体端盖1之间设有端盖密封圈21,上阀体端盖内设有衔铁 29,衔铁29位于定铁芯23上方,衔铁29为圆形结构,其直径大小与定铁芯23 一致,可获得较大的电磁力,在电磁铁得电之后可实现有效吸附,从而推动高速进气阀阀芯26下移;高速进气阀阀芯26位于定铁芯23内部,其上方具有较长的杆状结构,贯穿整个定铁芯23并与衔铁29接触,可实现了衔铁29控制主阀芯26运动的功能,同时杆状结构可起到限位导向的作用,保证高速进气阀阀芯 26在竖直方向上运动;高速进气阀阀芯26与定铁芯23接触的位置设有阀芯上密封圈28,高速进气阀阀芯26与上阀体零件接触的位置设有密封圈24,保证气动管路中的空气不会泄漏导致泄压;高速进气阀下方设有回位弹簧25,阀门密封圈27位于定铁芯和上阀体零件2之间,主阀芯26受衔铁和回位弹簧的共同作用实现上下移动,控制气动管路的通断。
所述高速进气阀20和高速排气阀3的工作原理相同,以所述高速进气阀为例进行详细说明。在高速进气阀不得电时,电磁线圈22没有电流通过,电磁铁没有产生电磁力,在回位弹簧25的作用下高速进气阀阀芯26推动衔铁29向上运动,阀芯位于初始位置,此时高速进气阀阀门密封圈27在回位弹簧25的作用下被压紧在定铁芯23上,阀门关闭,气路断开;当高速进气阀得电时,电磁线圈22得电产生电磁力,吸引衔铁29,当电磁线圈22对衔铁29的吸引力大于回位弹簧25的弹力时,衔铁29被吸引向下运动,同时衔铁29推动高速进气阀阀芯26向下运动,此时高速进气阀阀门密封圈27与定铁芯23分离,阀门打开,气路接通,高速进气阀的进气口a和出气口b接通,储气罐的气体进入控制腔A,是控制强A气体压力升高。
所述上阀体零件20和下阀体零件9由螺栓连接,两者之间设有阀体密封圈 8;上阀体腔体和下阀体腔体共同构成了自动调压阀的腔体,同时活塞6将自动调压阀腔体分为控制腔A和工作腔B,上阀体零件20和活塞6之间的腔体为控制腔A,活塞6与下阀体零件之间的腔体为工作腔B;上阀体零件20设有活塞 6的运动导向孔,活塞6上方设有导向装置,两者共同作用保证活塞在竖直方向上的运动,活塞6外围设有活塞密封圈7,活塞6与主阀芯组件为可分离结构,两者分离打开自动调压阀排气口,活塞6下方设有凸起,可与主阀芯组件形成线密封,保证密封性。
下阀体由下阀体零件9和主阀芯零件组成,下阀体零件9设有进气口e、出气口f、排气口g以及压力检测口g,同时下阀体还设有工作腔B;下阀体零件9 上方设有主阀芯导向结构,可保证主阀芯18在竖直方向上运动,导向装置同时可作为限制位移的装置,限制活塞6在竖直方向上的行程;所述主阀芯组件由主阀芯18、主阀芯回位弹簧15等部件组成,主阀芯18顶端设有上密封圈19,与活塞6上的凸起共同作用保证密封性;主阀芯18中部设有中密封圈17,负责控制阀门开启;中密封圈17下方设有主阀芯回位弹簧16,其与弹簧座10共同作用,用于固定主阀芯回位弹簧15;弹簧座10下方设有止动挡圈12,用于固定和调节弹簧座10位置;主阀芯18与弹簧座10之间设有主阀芯下密封圈14,弹簧座10余下阀体零件9之间设有弹簧座密封圈11;主阀芯下方设有橡胶消声器13。
所述自动调压阀高速进气阀20的进气口a连接制动系统储气罐,出气口连接自动调压阀控制腔A,高速排气阀3的进气口c连接自动调压阀控制腔A,出气口d连接大气;自动调压阀进气口e连接储气罐,出气口f连接车辆制动气室,排气口g连接大气;工作腔B位于活塞下方。当车辆需要制动时,控制器30控制高速进气阀20得电,电磁铁吸引衔铁29克服回位弹簧25弹力下移,推动高速进气阀阀芯26下移打开阀门,进气口a和出气口b接通,压缩气体进入控制腔A,当控制腔A内气体对活塞6的压力大于主阀芯回位弹簧15的弹力时,活塞6在压缩气体的作用下向下移,推动主阀芯18下移,此时活塞6下方的凸起与主阀芯顶端的上密封圈19接触,保证压缩气体不会从排气口g被排入大气,主阀芯下移导致主阀芯中密封圈17与下阀体零件9分离,主阀门被打开,储气罐内的压缩气体经由进气口e、主阀门、工作腔B、出气口f进入车辆制动气室,并且随着主阀芯向下移动行程的逐步变大,主阀门的开度也逐渐变大,车辆制动气室内气体的压力也变大,对车辆进行制动。
当车辆需要解除制动时,控制器30控制高速进气阀20失电,此时高速进气阀电磁铁对衔铁29的吸引力消失,在高速进气回位弹簧25的作用下,高速进气阀阀芯26上移,高速进气阀阀门27上移与定铁芯23接触,关闭阀门,高速进气阀关闭,储气罐和控制腔A的断开连接,不再有压缩气体进入控制腔,同时控制器控制高速排气阀3得电,其动作方式与高速进气阀20得电时动作方式一致,进而接通控制腔A和大气,控制腔A的压缩气体排入大气,压缩气体压力减小,在主阀芯回位弹簧15和控制腔A内压缩空气的共同作用下,主阀芯上移,主阀门的开度减小,进入车辆制动气室内的压缩气体减少,当主阀芯中密封圈 17与下阀体零件接触时,主阀门被完全关闭;随着控制腔A内压缩气体的压力持续降低,活塞6持续向上运动,活塞6与主阀芯18分离,此时接通自动调压阀的出气口f和排气口g,制动气室内的压缩气体经由出气口f、工作腔B、排气口g排入大气,制动气室完成泄压,制车辆动接触。
该面向自动驾驶的商用车电控气压制动系统用自动调压阀的实施方式如下:所述自动调压阀应用于自动驾驶车辆,其作为电控气压制动系统的关键元件,协助整个系统实现自动驾驶车辆自主制动。为了实现独立、快速调压的需求,所述自动调压阀被安装在车辆每一个车轮制动气室前方,用于分别独立的调节每个车轮制动气室的制动压力,车辆在行驶过程中,车辆电控气压制动系统会根据车辆的行驶工况,结合车辆动力学模型计算出每个车轮制动气室的目标制动压力p
自动调压阀控制器具有控制算法,在对出气口制动压力p
本发明并不局限于上述实施例,在本发明公开的技术方案的基础上,本领域的技术人员根据所公开的技术内容,不需要创造性的劳动就可以对其中的一些技术特征作一些替代和变形,这些替代和变形均在本发明的保护范围内。
- 适于商用车自动驾驶的气动自动调压阀及其控制方法
- 适于商用车多层级驾驶自动化的自动调压阀及控制方法