一种基于点扩散估计的河流表面流速测量方法
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及一种基于点扩散估计的河流表面流速测量方法,属于计算机视觉、光流估计、河流测速技术领域。
背景技术
在智慧水利正在兴起并发展的阶段,计算机视觉技术结合水文学和流体力学学科在流体运动研究方面不断进行发展。河流流速是水文信息获取的关键,基于视觉图像的图像法测速,更加适用于极端环境测流条件,基于图像光流信息的表面流速估计解放了大量的人力以及物力的投入,且有利于在夜晚等人工不易观察测量的时间段实现对水情信息的监测与分析。
在自然河流的横断面上,流速呈现非均匀的分布趋势,由于河床摩擦力的存在,底层水流的流速较小,然后河流流速由水底向水面递增,因水面接触到空气,空气摩擦也会导致流速变缓,所以在水面稍微之下的位置是河流的最大流速。从横向分布来说,河流在垂直剖面上流速自河岸边缘至河流中心位置的水速大小不一,两岸流速最小,河心流速最大,但在计算机视觉领域,目前基于视频检测水流流速只能是表面流速检测。为更准确估计水流表面运动方向和水速大小。
发明内容
本发明目的是提供了一种基于点扩散估计的河流表面流速测量方法,准确估计水流表面运动方向和水速大小。
本发明为实现上述目的,通过以下技术方案实现:
一种基于点扩散估计的河流表面流速测量方法,包括以下步骤:
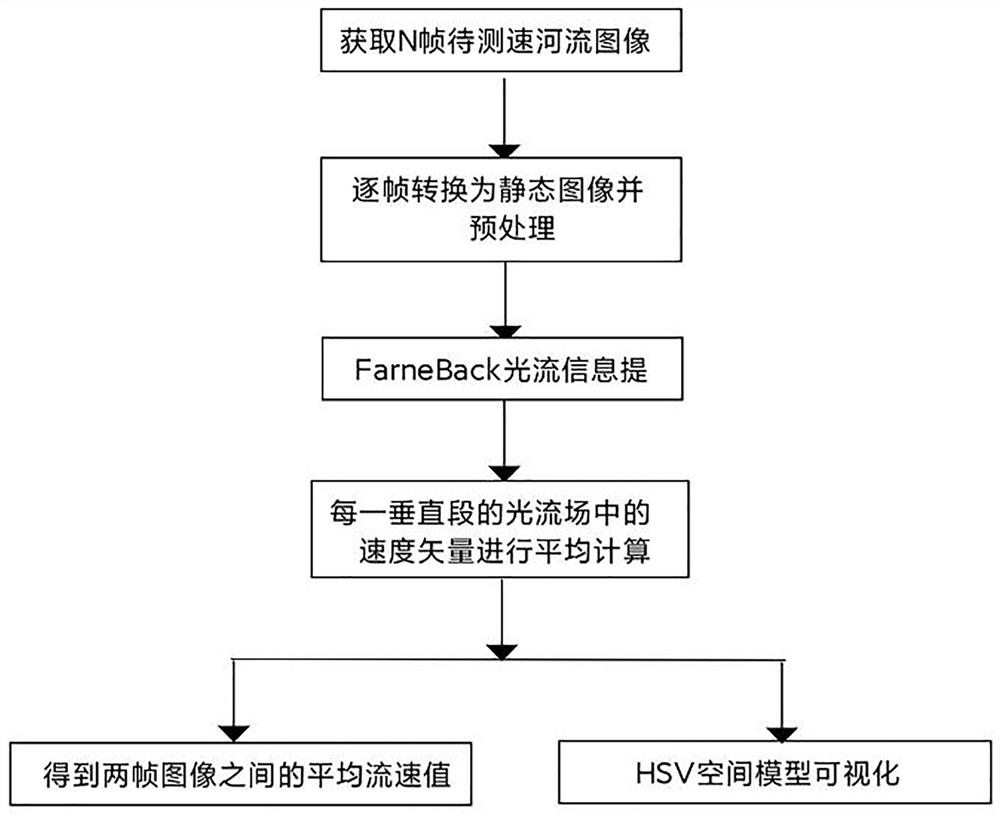
1)通过红外摄像头获取河面一定区域内视频图像,传输到实验室操作中心,对河流表面视频图像处理为静态图像并进行预处理;
2)FarneBack算法对河流表面静态图像逐帧进行光流信息提取;
3)将河流根据宽度垂直分段,测点按等距离分布,分别对每一垂直段的光流场中的速度矢量进行平均计算;
4)将结果进行可视化输出以及实际流速估计计算输出。
优选的,所述FarneBack算法具体如下:通过每个像素点的邻域信息来对该像素点的坐标位置进行多项式展开,得到一个以原坐标(x
优选的,二维流场可视化具体包括:将每个像素点位移矢量的振幅和相位信息转换为H、S、V颜色空间的三通道信息,可在视频流中定性地描述物体或者场景运动的情况。
优选的,二维流场可视化具体包括:通过欧氏距离对每个前后两帧变化的像素点位移进行计算和速度场显示,包括速度的方向和大小,根据以下公式求得各个像素点移动的位移;
其中A代表对称矩阵,大小为2×2,b为2×1的矩阵。
本发明的优点在于:采用基于点扩散估计的思想,以像素点为中心向四周扩散,将河流根据宽度垂直分段,测点按等距离分布,分别对每一垂直段的光流场中的速度矢量进行平均计算,准确估计水流表面运动方向和水速大小。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
图1为本发明流程视结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明提出的基于点扩散估计的稠密光流计算的河流表面流速测量及可视化显示方法首先需要通过红外摄像头获取河面一定区域内视频图像,传输到实验室操作中心,采用基于点扩散估计的思想,以像素点为中心向四周扩散,将河流根据宽度垂直分段,测点按等距离分布,分别对每一垂直段的光流场中的速度矢量进行平均计算,实现由不同权重组合计算二维流动速度场的结果。
FarneBack稠密光流算法通过每个像素点的邻域信息(由邻域像素点的像素值大小和位置来确定权重值)来对该像素点的坐标位置进行多项式展开,得到一个以原坐标(x
在进行每个像素点的位移估计时,考虑多项式的扩展是在一个像素的邻域内,如果像素经过移动位移d后,则整个多项式变化为:
f
所以,在像素移动之后,
f
=(x-d)
=x
其中,
A
如果A
在实际情况中未能完全满足A
则有:
A(x)d(x)=Δb(x)
d=(A
通过优化构建的目标函数,从而对位移进行求解,
e(x)=||Ad-Δb||
这种目标函数最终求取的结果图像中噪声较多,因此我们可以使用感兴趣像素点的邻域,然后使用加权的目标函数,即:
以此求取了各个像素点移动的位移。
基于点扩散估计的FarneBack光流计算有两种可视化模型,一是以FarneBack光流法为基础将对图像的每个像素点进行跟踪检测并计算光流场,因RGB颜色空间面向计算机,HSV颜色空间面向于用户,将每个像素点产生的光流矢量使用HSV颜色可视化模型进行显示,颜色代表光流矢量的方向,明暗代表矢量的大小。
其中将HSV模型的S通道赋值为255,即饱和度为100%,由光流矢量的弧度转换为角度,将其赋值为H通道,即矢量的方向由颜色进行表示,V通道表示矢量的大小,最终将光流矢量场转换为可视化的HSV图像,然后再转换为RGB图像。
针对相邻两帧进行估计计算,以20个间隔采样点(以每3s作为间隔进行采样)的水速作平均取值作为video7_20190918中60s视频的河流表面速度,分别测量第1,76,151,226,301,376,451,526,601,676,751,826,901,976,1051,1126,1201,1276,1351,1426帧时间点,两帧之间间隔为0.04s。分别以HSV颜色空间可视化模型进行定性估计和速度矢量场可视化模型进行定量计算。
- 一种基于点扩散估计的河流表面流速测量方法
- 基于光流计算的河流表面流速估计的方法和可读存储介质