一种被动式变距螺旋桨及螺旋桨驱动的无人机
文献发布时间:2023-06-19 13:46:35
技术领域
本发明属于航天航空工程领域,具体涉及一种被动式变距螺旋桨及螺旋桨驱动的无人机。
背景技术
螺旋桨作为一种升力和动力来源,已广泛使用在无人机、直升机等领域。高空长航时无人机在不同飞行高度上需要有不同的桨距角,如果采用常规电动变距机构,存在以下问题:(1)主动变距设备环境适应性难以保证。
(2)主动变距设备超长航时可靠性性难以保证。
(3)主动变距设备消耗一定能量。
(4)现有被动变距机构过于复杂,可靠性不强。
因此期待一种被动变距的简单变距结构的螺旋桨,能够解决上述问题。
发明内容
本发明的目的是提出一种被动式变距螺旋桨螺及螺旋桨驱动的无人机,能够被动地改变螺旋桨的桨距角。
为了实现上述目的,本发明提供了一种被动式变距螺旋桨,包括:
螺旋桨叶以及连接于所述螺旋桨叶根部的变距桨根,所述变距桨根为桶状,所述变距桨根用于套设在无人机的桨毂芯轴外周,所述桨毂芯轴用于连接动力源;
所述变距桨根具有扭转变形结构,所述螺旋桨转动产生的离心力变化使所述扭转变形结构发生扭转变形,进而使所述螺旋桨的桨距角改变。
作为可选方案,所述变距桨根远离所述螺旋桨叶的一端具有多个平行的条形镂空,所述条形镂空与所述桨毂芯轴轴向的夹角大于等于0度小于90度,所述条形镂空与所述条形镂空之间的条形桶壁构成所述扭转变形结构。
作为可选方案,所述条形镂空的长度为所述变距桨根长度的50%-100%。
作为可选方案,所述条形镂空的镂空率为30%-50%。
作为可选方案,所述变距桨根的材料为钢、铝或金属合金。
作为可选方案,所述螺旋桨叶与所述变距桨根为一体化结构。
作为可选方案,所述变距桨根的直径为40-80mm,所述变距桨根的长度为100-150mm。
本发明还提供了一种螺旋桨驱动的无人机,包括:如上述的被动式变距螺旋桨;
所述被动式变距螺旋桨的变距桨根套设在所述无人机的桨毂芯轴外周,且所述变距桨根远离所述螺旋桨叶的一侧固定在所述无人机的桨毂芯轴上。
作为可选方案,所述变距桨根通过多个销螺钉固定在所述桨毂芯轴上。
本发明的有益效果在于:
本发明通过变距桨根的扭转变形结构,当螺旋桨叶高速旋转时,螺旋桨转动产生的的离心力变化使扭转变形结构发生拉扭耦合变形,进而使螺旋桨的桨距角改变,通过设计计算和制件调整修配后,可以使特定转速下两片螺旋桨叶扭转角达到预期效果,并保持相同的扭转角。该被动式变距螺旋桨能够提高环形自适应性,保障超长航时的可靠性。该被动式变距螺旋桨,结构简单,重量轻、可靠性高、能量消耗小。
本发明具有其它的特性和优点,这些特性和优点从并入本文中的附图和随后的具体实施方式中将是显而易见的,或者将在并入本文中的附图和随后的具体实施方式中进行详细陈述,这些附图和具体实施方式共同用于解释本发明的特定原理。
附图说明
通过结合附图对本发明示例性实施例进行更详细的描述,本发明的上述以及其它目的、特征和优势将变得更加明显。
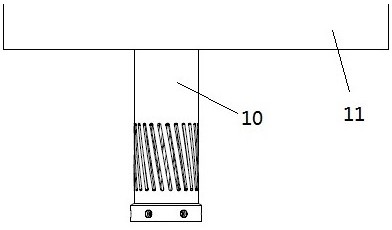
图1示出了根据本发明一实施例的一种被动式变距螺旋桨的结构示意图。
图2示出了根据本发明一实施例的无人机的桨毂芯轴的结构示意图。
图3示出了根据本发明一实施例的被动式变距螺旋桨安装在无人机的桨毂芯轴上的整体结构示意图。
图4示出了变距桨根变形前后的结构示意图。
附图标记
100-变距桨根;101-条形镂空;102-条形桶壁;10-扭转变形结构;11-螺旋桨叶。
具体实施方式
下面将更详细地描述本发明。虽然本发明提供了优选的实施例,然而应该理解,可以以各种形式实现本发明而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了使本发明更加透彻和完整,并且能够将本发明的范围完整地传达给本领域的技术人员。
在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
本发明一实施例提供了一种被动式变距螺旋桨,图1示出了根据本发明一实施例的一种被动式变距螺旋桨的结构示意图。图2示出了根据本发明一实施例的无人机的桨毂芯轴的结构示意图。图3示出了根据本发明一实施例的被动式变距螺旋桨安装在无人机的桨毂芯轴上的整体结构示意图。图4示出了变距桨根变形前后的结构示意图。请参照图1至图4,该螺旋桨包括:
螺旋桨叶11以及连接于所述螺旋桨叶11根部的变距桨根10,所述变距桨根10为桶状,所述变距桨根10用于套设在无人机的桨毂芯轴20外周,所述桨毂芯轴20用于连接动力源;
所述变距桨根10具有扭转变形结构,所述螺旋桨1转动产生的离心力变化使所述扭转变形结构发生扭转变形,进而使所述螺旋桨的桨距角改变。
具体地,桨距角指的是螺旋桨叶顶端翼型弦线与旋转平面的夹角。本实施例中扭转变形结构为变距桨根10的一部分,具体为所述变距桨根10远离所述螺旋桨叶10的一端具有多个平行的条形镂空101,所述条形镂空101与所述桨毂芯轴20轴向的夹角大于等于0度小于90度,所述条形镂空101与所述条形镂空之间的条形桶壁102构成所述扭转变形结构100。当螺旋桨转动产生的离心力发生变化时,所述扭转变形结构100发生扭转变形,进而使所述螺旋桨的桨距角改变。
参考图4,为一个实施例中,变距桨根10变形前后的结构示意图。其中左侧图(a)为变化前,条形镂空101相对于桨毂芯轴20的轴向具有一定的夹角,右侧图(b)为变化后,该夹角变小,倾向于与桨毂芯轴20的轴向平行。在其他实施例中,条形镂空101相对于桨毂芯轴20的轴向的夹角大于等于0度小于90,可以理解,扭转变形结构100的条形镂空101需要在桨毂芯轴20轴向方向上具有分量,才能使扭转变形结构产生扭转。
在一个实施例中,所述条形镂空101的长度为所述变距桨根10长度的50%-100%。如60%、80%等。
在一个实施例中,所述条形镂空101的镂空率为30%-50%,如40%,45%等。
在一个实施例中,所述变距桨根10的材料为钢、铝或金属合金。在其他实施例中,也可以是其他具有延展性的金属或非金属。
在一个实施例中,所述螺旋桨叶11与所述变距桨根10为一体化结构。可采用一体化成型工艺制造,变距桨根10与桨毂芯轴20套接装配,采用间隙配合,变距桨根10与桨毂芯轴20采用销螺钉连接。
在一个实施例中,所述变距桨根10的直径为40-80mm,如50 mm、60 mm、70 mm等,所述变距桨根10的长度为100-150mm,如110 mm、120mm、130mm等。
采用如下方法安装螺旋桨:
(1将变距桨根套接到无人机的桨毂芯轴外周;
(2通过多个销螺钉将变距桨根与桨毂芯轴根部连接固定;
(3将电机轴穿入桨毂芯轴中心并通过固定螺母连接稳固;
(4之后可进行螺旋桨转动试验。
本发明通过变距桨根的扭转变形结构,当螺旋桨叶高速旋转时,螺旋桨转动产生的的离心力变化使扭转变形结构发生拉扭耦合变形,进而使螺旋桨的桨距角改变,通过设计计算和制件调整修配后,可以使特定转速下两片螺旋桨叶扭转角达到预期效果,并保持相同的扭转角。该被动式变距螺旋桨能够提高环形自适应性,保障超长航时的可靠性。该被动式变距螺旋桨,结构简单,能量消耗小。
参考图3,本发明另一实施例提供了一种螺旋桨驱动的无人机,包括上述的被动式变距螺旋桨。所述被动式变距螺旋桨的变距桨根套设在所述无人机的桨毂芯轴外周,且所述变距桨根远离所述螺旋桨叶的一侧固定在所述无人机的桨毂芯轴上。本实施例中,变距桨根通过多个销螺钉固定在所述桨毂芯轴上。
本发明的无人机使螺旋桨的桨距角被动改变,通过设计计算和制件调整修配后,可以使特定转速下两片螺旋桨叶扭转角达到预期效果,并保持相同的扭转角。该被动式变距螺旋桨能够提高环形自适应性,保障超长航时的可靠性。该被动式变距螺旋桨,结构简单,能量消耗小。
以上已经描述了本发明的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。