行走路线智能化微调系统
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及番茄种植领域,尤其涉及一种行走路线智能化微调系统。
背景技术
番茄,即西红柿,是管状花目、茄科、番茄属的一种一年生或多年生草本植物,体高0.6~2米,全体生粘质腺毛,有强烈气味,茎易倒伏,叶羽状复叶或羽状深裂,花序总梗长2~5厘米,常3~7朵花,花萼辐状,花冠辐状,浆果扁球状或近球状,肉质而多汁液,种子黄色,花果期夏秋季。
番茄起源中心是南美洲的安第斯山地带。在秘鲁、厄瓜多尔、玻利维亚等地,至今仍有大面积野生种的分布。番茄属分为有色番茄亚种和绿色番茄亚种。前者果实成熟时有多种颜色,后者果实成熟时为绿色。番茄属由普通栽培种番茄及与栽培种番茄有密切关系的几个种组成,大体上又分为普通番茄和秘鲁番茄两个复合体种群。普通番茄群中包括:普通番茄、细叶番茄、奇士曼尼番茄、小花番茄和奇美留斯凯番茄、多毛番茄;秘鲁番茄群中包括智利番茄和秘鲁番茄。
目前,当执行采摘操作的机器人行走在番茄种植园内的道路上时,由于道路两侧番茄绿叶生长状态不一致,可能存在一边茂密一边萎缩的场景,这时,如果仍旧保持死板的道路中央位置行走的驱动策略,则可能造成机器人与生长茂密的一侧的绿叶纠缠在一起,影响了机器人行走和采摘的效率。
发明内容
为了解决相关领域的技术问题,本发明提供了一种行走路线智能化微调系统,能够基于智能化机器人两侧番茄绿叶布局状态实现对智能化机器人的行走路径的微调,以使得智能化机器人始终行走在两侧番茄绿叶分布区域的中间位置,从而避免影响智能化机器人的行走的同时防止对附近番茄苗体的生长造成干扰。
相比较于现有技术,本发明具备以下两处突出的实质性特点:
(1)基于智能化机器人架构行走的番茄种植园的行走路线上绿植分布状态解析出在左右两侧绿植分布区域中间位置对应的参考行走路径以对智能化机器人架构的行走路径进行微调;
(2)引入包括路线规划机构、跟随行走机构、工控计算机、显示屏、相机支架、可视化监控机构、永磁电动机、机械臂、果实筐体和顶端执行机构的智能化机器人架构,完成智能化机器人架构行走路径的微调操作。
根据本发明的一方面,提供了一种行走路线智能化微调系统,所述系统包括:
智能化机器人架构,行走在番茄种植园内,包括路线规划机构、跟随行走机构、工控计算机、显示屏、相机支架、可视化监控机构、永磁电动机、机械臂、果实筐体和顶端执行机构,所述路线规划机构、所述工控计算机、所述显示屏、所述相机支架、所述永磁电动机、所述机械臂、所述果实筐体和所述顶端执行机构都设置在所述跟随行走机构的上方,所述工控计算机与所述显示屏连接,所述永磁电动机与所述机械臂连接用于驱动所述机械臂以带动所述机械臂顶端处的顶端执行机构,所述可视化监控机构设置在所述相机支架的顶端,用于对智能化机器人架构前方行走场景执行画面捕获操作,以获得行走场景画面;
信号辨别机构,设置在所述相机支架内部,与所述可视化监控机构连接,用于获取所述行走场景画面中各个像素点分别对应的各个绿色成分值;
数据选择机构,与所述信号辨别机构连接,用于将绿色成分值大于等于预设成分阈值的像素点作为绿植像素点,将绿色成分值小于所述预设成分阈值的像素点作为其他像素点;
区域抓取设备,与所述数据选择机构连接,用于对所述行走场景画面中各个绿植像素点执行组合操作以获得左侧绿植区域和右侧绿植区域;
其中,所述路线规划机构与所述区域抓取设备连接,用于将位于所述左侧绿植区域和所述右侧绿植区域中间的曲线作为参考行走曲线;
其中,所述跟随行走机构与所述路线规划机构连接,用于基于所述参考行走曲线在所述行走场景画面中的位置实现对所述智能化机器人架构的相应的行走操作控制以使得所述智能化机器人架构按照所述参考行走曲线的实体路径进行行走;
其中,将位于所述左侧绿植区域和所述右侧绿植区域中间的曲线作为参考行走曲线包括:将所述行走场景画面中每一像素行上所述左侧绿植区域和所述右侧绿植区域相互靠近的两个边缘像素点之间中间位置的像素点作为所述参考行走曲线在所述像素行上的构成像素点;
其中,将位于所述左侧绿植区域和所述右侧绿植区域中间的曲线作为参考行走曲线还包括:将所述行走场景画面上各个像素行分别对应的各个构成像素点组合成所述参考行走曲线。
本发明的行走路线智能化微调系统设计针对、调控有效。由于能够基于道路两侧番茄绿叶布局状态实现对智能化机器人的行走路径的微调,从而提升了机器人的行走速度和效率。
附图说明
以下将结合附图对本发明的实施方案进行描述,其中:
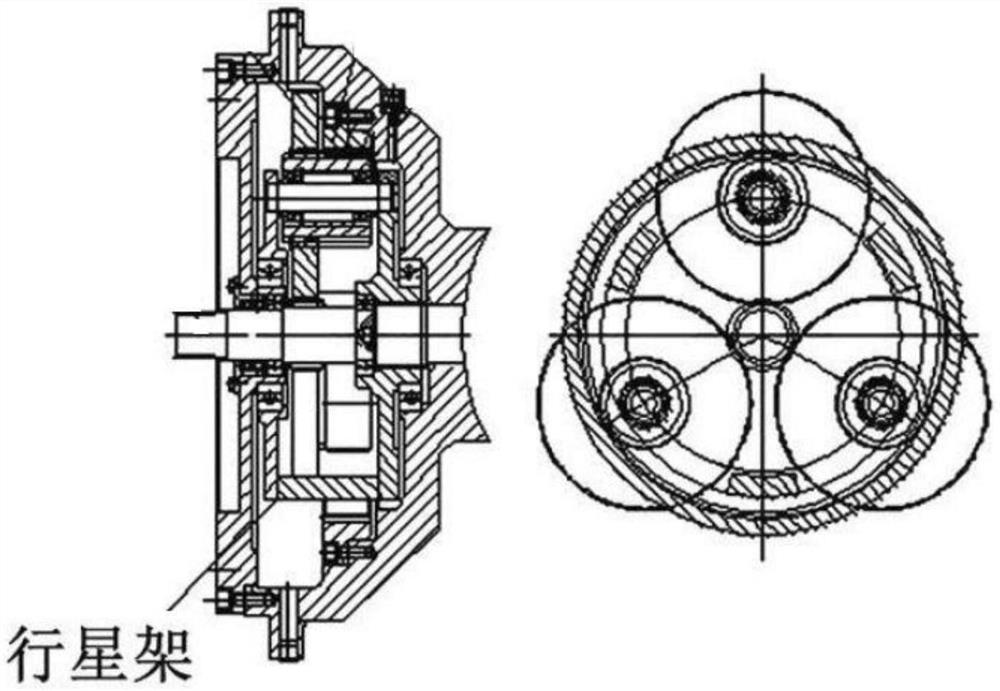
图1为根据本发明实施方案示出的行走路线智能化微调系统的永磁电动机的内部结构图。
具体实施方式
下面将参照附图对本发明的行走路线智能化微调系统的实施方案进行详细说明。
随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领域渗透。结合这些领域的应用特点,人们发展了各式各样的具有感知、决策、行动和交互能力的特种机器人和各种智能机器人。现在虽然还没有一个严格而准确的机器人定义,但是我们希望对机器人的本质做些把握:机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类的工作。它是高级整合控制论、机械电子、计算机、材料和仿生学的产物,在工业、医学、农业、服务业、建筑业甚至军事等领域中均有重要用途。
目前,当执行采摘操作的机器人行走在番茄种植园内的道路上时,由于道路两侧番茄绿叶生长状态不一致,可能存在一边茂密一边萎缩的场景,这时,如果仍旧保持死板的道路中央位置行走的驱动策略,则可能造成机器人与生长茂密的一侧的绿叶纠缠在一起,影响了机器人行走和采摘的效率。
为了克服上述不足,本发明搭建了一种行走路线智能化微调系统,能够有效解决相应的技术问题。
根据本发明实施方案示出的行走路线智能化微调系统包括:
智能化机器人架构,行走在番茄种植园内,包括路线规划机构、跟随行走机构、工控计算机、显示屏、相机支架、可视化监控机构、永磁电动机、机械臂、果实筐体和顶端执行机构,所述路线规划机构、所述工控计算机、所述显示屏、所述相机支架、所述永磁电动机、所述机械臂、所述果实筐体和所述顶端执行机构都设置在所述跟随行走机构的上方,所述工控计算机与所述显示屏连接,所述永磁电动机与所述机械臂连接用于驱动所述机械臂以带动所述机械臂顶端处的顶端执行机构,所述可视化监控机构设置在所述相机支架的顶端,用于对智能化机器人架构前方行走场景执行画面捕获操作,以获得行走场景画面,其中,所述永磁电动机的内部结构如图1所示;
信号辨别机构,设置在所述相机支架内部,与所述可视化监控机构连接,用于获取所述行走场景画面中各个像素点分别对应的各个绿色成分值;
数据选择机构,与所述信号辨别机构连接,用于将绿色成分值大于等于预设成分阈值的像素点作为绿植像素点,将绿色成分值小于所述预设成分阈值的像素点作为其他像素点;
区域抓取设备,与所述数据选择机构连接,用于对所述行走场景画面中各个绿植像素点执行组合操作以获得左侧绿植区域和右侧绿植区域;
其中,所述路线规划机构与所述区域抓取设备连接,用于将位于所述左侧绿植区域和所述右侧绿植区域中间的曲线作为参考行走曲线;
其中,所述跟随行走机构与所述路线规划机构连接,用于基于所述参考行走曲线在所述行走场景画面中的位置实现对所述智能化机器人架构的相应的行走操作控制以使得所述智能化机器人架构按照所述参考行走曲线的实体路径进行行走;
其中,将位于所述左侧绿植区域和所述右侧绿植区域中间的曲线作为参考行走曲线包括:将所述行走场景画面中每一像素行上所述左侧绿植区域和所述右侧绿植区域相互靠近的两个边缘像素点之间中间位置的像素点作为所述参考行走曲线在所述像素行上的构成像素点;
其中,将位于所述左侧绿植区域和所述右侧绿植区域中间的曲线作为参考行走曲线还包括:将所述行走场景画面上各个像素行分别对应的各个构成像素点组合成所述参考行走曲线。
接着,继续对本发明的行走路线智能化微调系统的具体结构进行进一步的说明。
所述行走路线智能化微调系统中:
将所述行走场景画面中每一像素行上所述左侧绿植区域和所述右侧绿植区域相互靠近的两个边缘像素点之间中间位置的像素点作为所述参考行走曲线在所述像素行上的构成像素点包括:获取所述行走场景画面中每一像素行上的所述左侧绿植区域占据的一个以上像素点以作为一个以上第一像素点。
所述行走路线智能化微调系统中:
将所述行走场景画面中每一像素行上所述左侧绿植区域和所述右侧绿植区域相互靠近的两个边缘像素点之间中间位置的像素点作为所述参考行走曲线在所述像素行上的构成像素点还包括:获取所述行走场景画面中每一像素行上的所述右侧绿植区域占据的一个以上像素点以作为一个以上第二像素点。
所述行走路线智能化微调系统中:
将所述行走场景画面中每一像素行上所述左侧绿植区域和所述右侧绿植区域相互靠近的两个边缘像素点之间中间位置的像素点作为所述参考行走曲线在所述像素行上的构成像素点还包括:将所述行走场景画面中每一像素行上相距距离最短的第一像素点和第二像素点作为所述行走场景画面中每一像素行上所述左侧绿植区域和所述右侧绿植区域相互靠近的两个边缘像素点。
所述行走路线智能化微调系统中:
对所述行走场景画面中各个绿植像素点执行组合操作以获得左侧绿植区域和右侧绿植区域包括:将所述行走场景画面中的各个绿植像素点中孤立的绿植像素点去除,以获得剩余的多个绿植像素点。
所述行走路线智能化微调系统中:
对所述行走场景画面中各个绿植像素点执行组合操作以获得左侧绿植区域和右侧绿植区域还包括:对所述行走场景画面中多个绿植像素点执行组合操作以获得左侧绿植区域和右侧绿植区域。
所述行走路线智能化微调系统中:
所述信号辨别机构、所述数据选择机构和所述区域抓取设备设置在所述相机支架内部的同一柔性电路板上且采用一个石英振荡设备执行时钟信号的配置。
所述行走路线智能化微调系统还可以包括:
电力支撑机构,设置在所述智能化机器人架构上,用于分别为所述信号辨别机构、所述数据选择机构和所述区域抓取设备提供各自需要的供电电压。
所述行走路线智能化微调系统中:
获取所述行走场景画面中各个像素点分别对应的各个绿色成分值包括:获取所述行走场景画面中每一个像素点在RGB空间下的绿色成分值、红色成分值以及蓝色成分值。
另外,RGB(red,green,blue)颜色空间最常用的用途就是显示器系统,彩色阴极射线管,彩色光栅图形的显示器都使用R、G、B数值来驱动R、G、B电子枪发射电子,并分别激发荧光屏上的R、G、B三种颜色的荧光粉发出不同亮度的光线,并通过相加混合产生各种颜色;扫描仪也是通过吸收原稿经反射或透射而发送来的光线中的R、G、B成分,并用它来表示原稿的颜色。
RGB色彩空间称为与设备相关的色彩空间,因为不同的扫描仪扫描同一幅图像,会得到不同色彩的图像数据;不同型号的显示器显示同一幅图像,也会有不同的色彩显示结果。显示器和扫描仪使用的RGB空间与CIE1931RGB真实三原色表色系统空间是不同的,后者是与设备无关的颜色空间。btw:Photoshop的色彩选取器(Color Picker)。可以显示HSB、RGB、LAB和CMYK色彩空间的每一种颜色的色彩值。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 行走路线智能化微调系统
- 一种巡检机器人行走路线追踪系统及方法