用于连续校准霍尔传感器的系统
文献发布时间:2023-06-19 13:46:35
背景技术
霍尔效应磁场传感器(又称霍尔传感器)是固态磁性传感器装置,其可用于测量磁场或通过电流产生的磁场间接测量电流,例如约几十安培(Amp)的非常大电流。霍尔传感器的应用通常要求高精度测量,但已知霍尔传感器的灵敏度随工艺变化、温度、封装应力、偏置电流、装置寿命等而变化和漂移。此外,霍尔传感器的信号电平相对较小,使得其对自身的热噪声和包含霍尔传感器的半导体裸片上的其它组件的噪声敏感。
闭环校准系统将已知的磁场施加到霍尔传感器,例如使已知的温度不敏感电流通过漂移补偿线圈或传感器附近的其它适当迹线,并基于测量的传感器输出与预期的传感器输出之间的差调整霍尔传感器的灵敏度。然而,校准只可在霍尔传感器不使用时执行,因为校准信号可干扰表示磁场的主信号,从而需要会扰乱主信号的不频繁的校准或周期性的校准。
待测量的磁场或待由电流产生的磁场测量的电流可影响霍尔传感器的操作条件,使得没有电流或磁场的周期性校准不会准确地说明传感器的操作条件。例如,10安培的电流会导致其迹线升温,增加霍尔传感器的温度并改变其灵敏度。此外,在例如紧急关闭系统的应用中主信号中的中断可能是不可接受的,在所述应用中,霍尔传感器间接测量非常大的电流,并响应于电流增加到可接受的安全限制以上而触发紧急关闭。
一些闭环校准系统使用二级霍尔传感器来实施连续校准,通过副霍尔传感器来发送校准信号。副通道不影响主信号,并允许对霍尔传感器的环境和操作条件的变化作出近乎实时的响应。然而,主和副霍尔传感器与其对应通道之间的不匹配可给校准带来误差,从而削弱了通过副霍尔传感器进行的连续校准提供的优势。
发明内容
在一个实例中,一种系统包括校准电流产生器和偏置电流产生器。所述校准电流产生器向第一霍尔通道和第二霍尔通道提供校准电流。所述偏置电流产生器从所述第一和所述第二霍尔通道获得校准信号,并确定所述校准信号与阈值之间的差。所述偏置电流产生器基于所述差调整所述第一和所述第二霍尔通道的偏置电流。
在一些实例中,所述校准电流产生器包括电压源、耦合到所述电压源的电流产生器和斩波电路。所述电压源向所述电流产生器提供参考电压,所述电流产生器产生所述校准电流并将其提供给所述斩波电路。所述斩波电路经由第一电流路径或第二电流路径向所述第一和所述第二霍尔通道提供所述校准电流。所述电压源可为带隙电压参考电路,且所述电流产生器可为电阻器。所述校准电流产生器可包含用于微调所述校准电流的微调电路。
在一些实例中,所述偏置电流产生器包括减法器电路、耦合到所述减法器电路的模/数转换器(ADC)、耦合到所述ADC的控制器以及耦合到所述控制器的数/模转换器(DAC)。所述减法器电路从所述第一霍尔通道获得第一信号和从所述第二霍尔通道获得第二信号,并从所述第二信号中减去所述第一信号以获得所述校准信号。所述ADC对所述模拟校准信号进行采样以获得采样的数字校准信号。所述ADC可在一段时间内对所述校准信号进行积分以获得所述采样信号。当所述校准电流产生器中的电流产生器包括电阻器时,可跨所述电阻器取得所述ADC的参考电压。
所述控制器确定所述采样信号与所述阈值之间的差。所述控制器可将所述采样信号与多个先前采样信号进行平均以获得平均信号,并确定所述平均信号与所述阈值之间的差。所述控制器基于所述差确定对所述偏置电流的调整,并基于所述所确定的调整产生控制信号。当所述校准电流产生器包含斩波电路时,所述控制器可向所述斩波电路提供时钟信号,且所述斩波电路基于所述时钟信号在所述第一电流路径与所述第二电流路径之间交替。所述DAC根据所述控制信号调整所述偏置电流。
在一些实例中,所述偏置电流产生器包括减法器电路、耦合到所述减法器电路的差分放大器、耦合到所述差分放大器的滤波器以及耦合到所述滤波器的电流产生器。所述减法器电路从所述第一霍尔通道获得第一信号和从所述第二霍尔通道获得第二信号,并从所述第二信号中减去所述第一信号以获得所述校准信号。所述差分放大器在正输入端接收所述校准信号和在负输入端接收所述阈值,并输出所述校准信号与所述阈值之间的差。所述电流产生器基于所述经滤波的差调整所述偏置电流。
在一些实例中,所述系统包含所述第一和所述第二霍尔通道,其分别耦合到第一放大器和第二放大器。所述第一霍尔通道包括第一霍尔装置,所述第一霍尔装置在第一霍尔传感器的顶部上具有带有第一缠绕方向的第一漂移补偿线圈。所述第二霍尔通道在第二霍尔传感器的顶部上具有带有第二缠绕方向的第二漂移补偿线圈。所述第二缠绕方向与所述第一缠绕方向相反。所述第一和所述第二霍尔装置是相匹配的。所述第一霍尔通道的增益和所述第二霍尔通道的增益大体上相等,且所述第一放大器的增益和所述第二放大器的增益大体上相等。所述第一和所述第二霍尔通道经定向使得所述第一和所述第二霍尔通道对磁场作出大体上相同的响应。
附图说明
针对各个实例的详细描述,现将参考附图,其中:
图1说明在电流导体上方的磁性传感器系统的实例布置。
图2以框图形式说明实例闭环校准磁性传感器系统。
图3以框图形式说明闭环校准磁性传感器系统中校准系统的实例校准电流产生器。
图4以框图形式说明闭环校准磁性传感器系统中校准系统的实例偏压电流产生器。
图5以框图形式说明用于闭环校准磁性传感器系统的实例校准系统,所述校准系统包含基于图3所展示的校准电流产生器和图4所展示的偏置电流产生器的校准电流产生器。
图6以框图形式说明闭环校准磁性传感器系统中校准系统的实例模拟偏压电流产生器。
图7说明与电流导体成直线的闭环校准磁性传感器系统的另一实例布置。
具体实施方式
所描述的校准系统使用具有相反漂移补偿线圈绕组的两个霍尔通道实施相关联霍尔传感器的连续校准,使得来自一个霍尔通道的校准信号经历与来自另一个霍尔通道的校准信号不同的极性。不同的极性使校准信号与主信号线性组合,同时保持与主信号正交且不干扰主信号。因此,所描述的校准系统能够连续地校准霍尔传感器,并考虑归因于要测量的磁场和产生磁场的电流而引起的环境和操作条件的变化。包含校准信号和主信号两者的组合信号被提供给相同组件并由相同组件进行修改,使得由主信号路径引入的任何误差反映在校准信号以及主信号中。
第一和第二霍尔通道经布置成使得两者经历大体上相同的磁场,两者具有大体上匹配的霍尔传感器装置,并且两者具有大体上相同的增益。耦合到第一和第二霍尔通道的放大器也具有大体上相同的增益,使得校准信号容易从主信号中去除以进行信号处理,并且校准信号容易隔离以与校准信号的期望值进行比较。
用于第一和第二霍尔通道中的漂移补偿线圈的校准电流产生器包含电压源、电流产生器和斩波电路。可为带隙电压参考电路的电压源耦合到电流产生器且产生参考电压。电流产生器包括电阻器,并输出用于第一和第二霍尔通道的校准电流。斩波电路通过对校准电流进行斩波来平均第一和第二霍尔通道与耦合到第一和第二霍尔通道的放大器之间的任何失配。
校准系统的实例偏置电流产生器包含减法器电路、耦合到减法器电路的模/数转换器(ADC)、耦合到ADC的控制器以及耦合到控制器的数/模转换器(DAC)。减法器电路从来自第二放大器的输出信号中减去来自第一放大器的输出信号,以隔离校准信号。ADC对校准信号进行采样,并且在一些实施方案中,在一段时间内对校准信号进行积分以产生采样的校准信号。控制器将采样的校准信号与表示校准信号的期望值的阈值进行比较,并基于所述比较确定对偏置电流的调整。在一些实例中,控制器将采样的校准信号与数个先前采样的校准信号值进行平均,从而有效地对校准信号进行滤波。DAC基于来自控制器的调整调整或维持偏置电流。
另一实例偏置电流产生器包含耦合到差分放大器的正输入端的减法器电路、差分放大器、滤波器和电流产生器。差分放大器的负输入端接收表示校准信号的期望值的阈值。差分放大器输出校准信号的实际值与期望值之间的差,所述差经滤波且接着提供到电流产生器。电流产生器根据经滤波的差调整或维持偏置电流。
图1说明在电流导体150上方的包含磁性传感器系统的半导体裸片100的实例布置。半导体裸片100放置在马蹄形电流导体150的顶部上,并且经布置使得磁性传感器系统中的霍尔传感器在马蹄形电流导体150的内侧居中,从而确保每一霍尔传感器经历由通过电流导体150的电流产生的大体上相同的磁场。
图2以框图形式说明实例闭环校准磁性传感器系统200,其包含一组霍尔传感器210、一组低噪声放大器230、信号处理器250和校准系统260。所述组霍尔传感器210包含布置成四重配置的四个霍尔传感器装置202、204、206和208,每一霍尔传感器装置包含放置在霍尔传感器的顶部上的漂移补偿线圈。所述组霍尔传感器装置210放置在磁性传感器系统200内,使得每一霍尔传感器装置202到208对待测量的磁场的响应大体上相等,例如在图1所展示的马蹄形电流导体150的上方和在马蹄形电流导体150的内侧居中。
通道214包含并联耦合在一起的来自左上象限的霍尔传感器装置202和来自右下象限的霍尔传感器装置208。通道218包含并联耦合在一起的来自右上象限的霍尔传感器装置206和来自左下象限的霍尔传感器装置204。通道214和218中的漂移补偿线圈的缠绕方向相反。例如,通道214包含具有顺时针绕组的霍尔传感器装置,而通道218包含具有逆时针绕组的霍尔传感器装置。施加到霍尔传感器装置202到208中的漂移补偿线圈的校准电流产生由所述组霍尔传感器装置测量的校准磁场作为校准信号Vcal。
在此实例中,每一通道214和218包含两个霍尔传感器装置,但是在其它实施方案中,通道可包含单个霍尔传感器装置,或者任何适当数量的霍尔传感器装置。所述组霍尔传感器装置210中和每一通道214和218内的霍尔传感器装置的布置减小传感器旋转期间的偏移并改进霍尔传感器之间的匹配,如本文将参考磁性传感器系统200的操作进一步描述。
通道214将信号224输出到所述组放大器230中的放大器234,放大器234输出放大信号244。通道218将信号228输出到所述组放大器230中的放大器238,放大器238输出放大信号248。信号处理器250接收分别对应于通道214和218的放大信号244和248,并去除校准信号Vcal以获得测量的主信号Vp,其表示归因于通过电流导体的电流产生的磁场而来自所述组霍尔传感器210的信号。
校准系统260包含偏置电流产生器270和校准电流产生器280。偏置电流产生器270接收放大器信号244和248,隔离校准信号Vcal,并产生适当的偏置电流275以维持或调整所述组霍尔传感器210的灵敏度。校准电流产生器280产生温度不敏感的校准电流,并经由迹线284和288将其提供给所述组霍尔传感器210。用于校准电流的第一电流路径从迹线284开始并在迹线288结束,且用于校准电流的第二电流路径从迹线288开始并在迹线284结束。校准电流被施加到霍尔传感器装置202到208中的漂移补偿线圈,并使霍尔传感器测量校准信号Vcal以及测量的主信号Vp。校准信号Vcal和测量的主信号Vp线性组合。
如先前在本文参考通道214和218所描述,通道214中的漂移补偿线圈在与通道218中的漂移补偿线圈相反的方向上缠绕,从而致使来自一个通道的校准信号Vcal被加到测量的主信号Vp,并且来自另一个通道的校准信号Vcal被从测量的主信号Vp中减去。例如,从通道214输出的信号224表示为:
Signal 224=(Vp-Vcal)(GainH(214))
其中GainH(214)表示通道214中霍尔传感器装置202和208的增益。从通道218输出的信号228表示为:
Signal 228=(Vp+Vcal)(GainH(218))
其中GainH(218)表示通道218中霍尔传感器装置204和206的增益。
响应于来自通道214的信号224从放大器234输出的信号244表示为:
Signal 244=(Signal 224)(GainA(234))
Signal 244=(Vp-Vcal)(GainH(214))(GainA(234))
Signal 244=(Vp-Vcal)(GainT(214))
其中GainA(234)表示放大器234的增益,而GainT(214)表示通道214的总增益。响应于来自通道218的信号228从放大器238输出的信号248表示为:
Signal 248=(Signal 228)(GainA(238))
Signal 248=(Vp+Vcal)(GainH(218))(GainA(238))
Signal 248=(Vp+Vcal)(GainT(218))
其中GainA(238)表示放大器238的增益,而GainT(218)表示通道218的总增益。
因为测量的主信号Vp和校准信号Vcal通过同一组霍尔传感器装置210和同一组放大器230,所以两者都遭受归因于环境和操作条件的相同的漂移和波动,这允许校准系统260更精确地调整所述组霍尔传感器装置210的灵敏度和偏置电流。霍尔传感器装置202到208和所述组放大器230被选择为大体上匹配,使得GainH(214)和GainH(218)大体上相等,并且GainA(234)和GainA(238)大体上相等。因此,GainT(214)和GainT(218)大体上相等,从而致使信号244和248中的每一者中的测量的主信号Vp大体上相同和同相。
信号处理器250通过将信号244和248相加来从信号244和248中去除校准信号Vcal,以便产生主信号255,其表示为:
Signal 255=Signal 244+Signal 248
Signal 255=(Vp-Vcal)(GainT(214))+(Vp+Vcal)(GainT(218))
Signal 255=Vp(GainT(214)+GainT(218))+Vcal(GainT(218)-GainT(214))
如此表示说明,测量的主信号Vp是共模信号,而校准信号Vcal是差分信号,这保证Vp和Vcal是正交信号且互不干扰。其中,由于所述组霍尔传感器210和所述组放大器230大体上匹配,GainT(214)和GainT(218)大体上相同,校准信号Vcal被抵消,致使主信号255表示为:
Signal 255=Vp(2GainT)
然后,在将主信号255输出到半导体装置上的其它电路之前,信号处理器250对主信号255执行任何进一步的计算或其它信号处理。
偏置电流产生器270经配置以通过将校准信号Vcal与信号244和248隔离来确定参考信号Vref,并相应地调整偏置电流275。因为信号244和248中的校准信号Vcal是差分的,所以偏置电流产生器280可通过使两个信号相减来隔离校准信号Vcal:
Vref=Signal 248-Signal 244
Vref=(Vp+Vcal)(GainT(218))-(Vp-Vcal)(GainT(214))
Vref=Vp(GainT(218)-GainT(214))+Vcal(GainT(218)+GainT(214))
其中,由于所述组霍尔传感器210和所述组放大器230大体上匹配,GainT(214)和GainT(218)大体上相同,测量的主信号Vp被抵消,导致Vref表示为:
Vref=Vcal(2GainT)
霍尔传感器装置202到208或放大器234和238中失配导致不相等的GainT(214)和GainT(218),这将误差项引入主信号255和Vref中。校准电流产生器280可经配置以对校准电流进行斩波并经由第一电流路径(从迹线284开始并在迹线288结束)或第二电流路径(从迹线288开始并在迹线284结束)向所述组霍尔传感器210提供校准电流,以减小GainT(214)与GainT(218)之间的差。去斩波和平均斩波的校准信号Vcal将主信号255和Vref中的误差项调制成可变的AC纹波,从而防止失配造成DC误差。
对于主信号255,校准信号Vcal比测量的主信号Vp小得多,这将误差项减小到磁性传感器系统200的噪声阈值以下。相比之下,对于Vref,误差项可大于校准信号Vcal,这是因为测量的主信号Vp比Vcal大得多。在一些实施方案中,偏置电流产生器270在调整偏置电流275之前对Vref进行滤波以考虑来自测量的主信号Vp的较大误差项。
图3以框图形式说明用于校准系统360的实例校准电流产生器380,其可包含在与图2中所展示的系统200类似的闭环校准磁性传感器系统300中。为了便于解释,本文参考图2所展示的磁性传感器系统200来描述校准电流产生器380。校准电流产生器380经配置以产生温度不敏感的校准电流330,其经由迹线384和388施加到霍尔传感器装置202到208中的漂移补偿线圈。用于校准电流330的第一电流路径从迹线384开始并在迹线388结束,且用于校准电流330的第二电流路径从迹线388开始并在迹线384结束。校准电流330致使霍尔传感器测量校准信号Vcal以及测量的主信号Vp。
校准电流产生器380包含电压源310、电流产生器320和斩波电路340。电压源310可为大体上与温度无关并向电流产生器320提供参考电压315的带隙电压参考电路。电流产生器320包括具有低温度系数的电阻器325(例如硅铬(SiCr)电阻器),并且基于来自电压源310的参考电压315产生校准电流330。斩波电路340接收校准电流330和共模电压350,并经由迹线384和388输出校准电流330到所述组霍尔传感器210,从而以适当的频率在第一与第二电流路径之间交替。
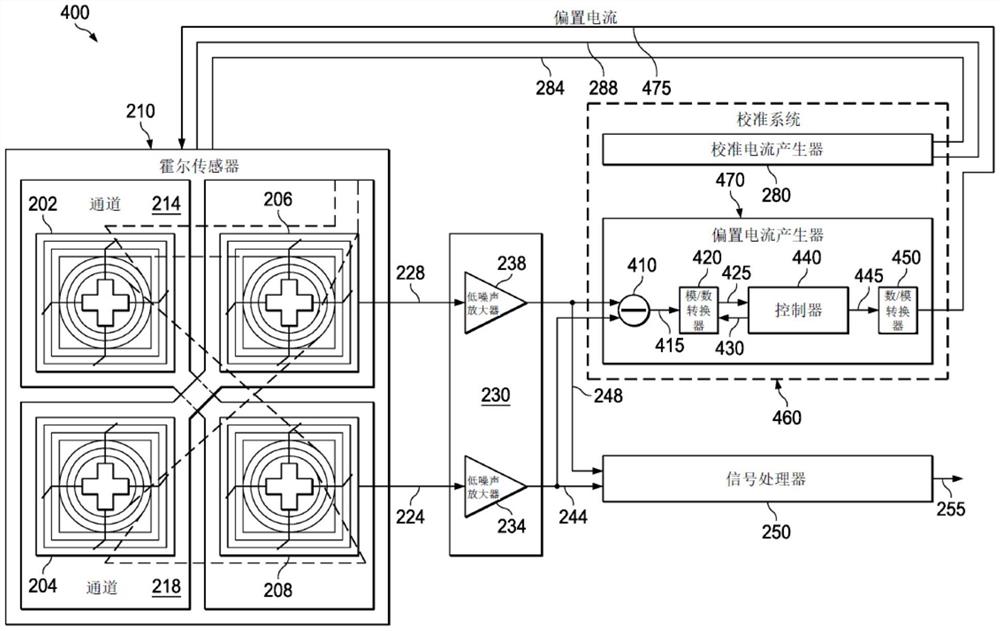
图4以框图形式说明校准系统460中的实例偏置电流产生器470,其可包含在与图2中所展示的系统200类似的闭环校准磁性传感器系统400中。为了便于解释,本文参考图2所展示的磁性传感器系统200来描述偏置电流产生器470。偏置电流产生器470接收放大器信号244和248,隔离校准信号Vcal,并产生适当的偏置电流475以维持或调整所述组霍尔传感器210的灵敏度。偏压产生器470包含减法器410、ADC 420、控制器440和DAC 450。在此实例中,控制器440包含在偏压产生器470中,但在其它实施方案中,控制器440是磁性传感器系统400的部分,并且具体来说不包含在偏压产生器470中。
减法器410接收信号244和248并使其相减,如先前在本文中参考图2所描述。所得参考信号Vref 415被提供给ADC 420,ADC 420对其进行采样并将采样数据提供给控制器440。在一些实例中,ADC 420在一段时间内对Vref 415进行积分,且控制器440将采样值425与数个先前采样值进行平均,以过滤来自所述组霍尔传感器210的噪声和由GainT(214)和GainT(218)中的失配引入的来自主信号的误差。在此实例中,ADC 420在12.5毫秒内对Vref415进行积分,且控制器440将采样值425与8个先前采样值进行平均,从而产生10赫兹(Hz)带宽滤波。控制器440向ADC 420发送控制信号430以控制ADC 420对Vref 415进行积分的时间。
控制器440将平均采样值425与表示所述组霍尔传感器210的预期传感器输出值和期望灵敏度的阈值进行比较。平均采样值425与预期传感器输出值之间的差来源于环境和操作条件的变化,从而提示控制器440确定对偏置电流475的调整以补偿条件的变化。控制器440基于比较和确定的调整向DAC 450发送控制信号445,从而致使DAC 450产生用于所述组霍尔传感器210的偏置电流475。
图5以框图形式展示实例校准系统560,其包含基于图3所展示的校准电流产生器380和图4所展示的偏置电流产生器470的校准电流产生器580,从而展示每一者中的组件之间的相互作用。为了便于解释,本文参照图2所展示的闭环校准磁性传感器系统200、图3所展示的校准电流产生器380和图4所展示的偏置电流产生器470来描述校准系统560。在此实例中,控制器440包含在偏压产生器470中,但在其它实施方案中,控制器440是磁性传感器系统500的部分,并且具体来说不包含在偏压产生器470中。控制器440和信号处理器250经由信号510通信。控制器440可向信号处理器250提供关于所述组霍尔传感器210中的灵敏度的漂移以及环境和操作条件的变化的警报。
校准电流330和用于ADC 420的参考电压520紧密耦合,以确保来自电压源310的参考电压315的任何变化也反映在ADC 420中。如果参考电压315改变而ADC 420的参考电压520保持不变,那么Vref 415归因于基准电压315的改变而不是由于环境或操作条件的改变而改变。来自ADC 420的采样值425也改变,并且不再反映所述组霍尔传感器210的灵敏度的改变。为了确保校准电流330和用于ADC 420的参考电压520紧密耦合,跨电流产生器320中的电阻器325取得ADC参考电压520。电阻器325的温度系数是校准系统560的漂移精度的限制因素。
在此实例中,校准电流产生器580还包含微调电路540,其微调来自电流产生器320的校准电流330以考虑装置差异。控制器440向微调电路540提供控制信号530,从而指示微调电路540微调校准电流330。斩波电路340接收经微调的校准电流550和共模电压350,并经由迹线384和388输出经微调的校准电流550,从而以适当的频率在第一与第二电流路径之间交替。
控制器440还向斩波电路340提供时钟信号570。在一些实例中,时钟信号570指示斩波电路340在第一与第二电流路径之间交替的斩波频率。因为测量的主信号Vp是共模的且校准信号Vcal是差分的,所以控制器440可独立地对所述组霍尔传感器210、所述组放大器230和校准电流330进行斩波,其各自都以独立的适当的频率进行斩波以减少通道交互作用和来自增益失配的误差。
图6以框图形式说明校准系统660中的实例模拟偏置电流产生器670,其可包含在与图2中所展示的磁性传感器系统200类似的闭环校准磁性传感器系统600中。为了便于解释,本文参考图2所展示的磁性传感器系统200来描述偏置电流产生器670。偏置电流产生器670接收放大器信号244和248,隔离校准信号Vcal,并产生适当的偏置电流675以维持或调整所述组霍尔传感器210的灵敏度。偏置电流产生器670包含减法器610、差分放大器625、滤波器640和电流产生器650。
减法器610接收信号244和248并使其相减,如先前在本文中参考图2所描述。所得参考信号Vref 615被提供给差分放大器625的正输入端。差分放大器625的负输入端响应于校准电流284和288接收表示来自所述组霍尔传感器210的预期电压的预期电压Vexp 620。Vref 615与Vexp 620之间的差630来源于环境和操作条件的变化,并被提供给滤波器640,滤波器640过滤来自所述组霍尔传感器210的噪声和由GainT(214)和GainT(218)中的失配引入的来自主信号的误差。经滤波的差分信号645被提供给电流产生器650,其维持或调整由其产生的偏置电流675的值。
图7说明与电流导体790成直线的闭环校准磁性传感器系统700的另一实例布置。图7展示包含在磁性传感器系统700中的一组霍尔传感器710和一组低噪声放大器730。所述组霍尔传感器710和所述组放大器730类似于图2所展示的所述组霍尔传感器210和所述组放大器230,只是除了所述组霍尔传感器710布置在电流导体790的任一侧上,而不是布置在图1所展示的电流导体150的一个侧上。霍尔传感器装置702和706放置在电流导体790的一个侧上,且霍尔传感器装置704和708放置在电流导体790的相对侧上。
所述组霍尔传感器装置710放置在磁性传感器系统700内,使得每一霍尔传感器装置702到708对环境磁场的响应大体上相等,但以与待从电流导体790测量的磁场780相反的极性进行响应,从而致使测量的主信号Vp为差模,而校准信号Vcal为共模。Vp和Vcal是正交信号并且彼此不干扰,大体上与图2中相同。
在磁性传感器系统700中,霍尔传感器702、704、706和708中的每一者包括单独的霍尔通道,使得磁性传感器系统700包含四个唯一的霍尔通道。环境磁场跨所述组霍尔传感器710具有相同量值和极性,而磁场780在电流导体790的任一侧上具有相反的极性。通过将架构扩展到四个独立的霍尔通道,磁性传感器系统700可利用环境磁场和磁场780的相对极性来测量主信号,抵消环境磁场,并校准霍尔通道的偏置电流,以响应于归因于环境和操作条件的变化而引起的漂移来调适所述组霍尔传感器710的灵敏度。
通过从来自电流导体790的一个侧上的霍尔通道的信号中减去来自电流导体790的另一侧的霍尔通道的信号,来隔离主信号Vp:
4Vp=(Signal 742+Signal 746)-(Signal 744+Signal 748)
通过将来自电流导体790的两侧上的霍尔通道的信号相加在一起来隔离环境信号Vamb:
4Vamb=Signal 742+Signal 744+Signal 746+Signal 748
校准信号Vcal通过组合来自相反霍尔通道的信号并找到差来隔离,如本文参考图2所描述:
4Vcal=(Signal 742+Signal 748)-(Signal 744+Signal746)
在此描述中,术语“耦合(couple/couples)意味着间接或直接有线或无线连接。因此,如果第一装置耦合到第二装置,那么所述连接可为通过直接连接或经由其它装置及连接的间接连接。陈述“基于”意味着“至少部分基于”。因此,如果X是基于Y,那么X可随Y及任何数目个其它因素而变。除非另有说明,在本描述中,“相同”或“大体上”或“很大程度”相同是指两者之间的距离在10%以内,“大体上”或“很大程度”不受影响或不变是指小于10%的变化,且“大体上”都是指90%或更多。
在描述的实施例中,修改是可能的,且在权利要求书的范围内,其它实施例是可能的。