光超声波测量装置、方法、程序、记录介质
文献发布时间:2023-06-19 13:48:08
技术领域
本发明涉及超声波的反射波以及光声波的测量。
背景技术
以往,对光吸收体照射特定波长的脉冲光时,光能被吸收。由此,在光吸收体中,引起瞬间的绝热膨胀,产生超声波。利用压电元件等传感器获取该超声波并进行图像化,由此,能够知晓光吸收体的三维分布。另外,还已知对测量对象给予超声波,测量其反射波,获取测量对象内的图像(参照专利文献1、专利文献2及专利文献3)。
现有技术文献
专利文献
专利文献1:日本特开2017-038917号公报
专利文献2:日本特表2015-501175号公报
专利文献3:国际公开第2013/121751号
发明要解决的课题
然而,在想要通过上述那样的以往技术来对测量对象(例如,皮肤)进行测量的情况下,需要使测量装置与测量对象接触。于是,测量对象的表面因测量对象的压力而隆起。因该测量对象的隆起,导致测量对象内部的物体(例如,血管)的深度方向的位置发生变动。
发明内容
对此,本发明的课题在于,一边补偿使测量装置与测量对象接触时的、测量对象的表面形状的变动,一边进行测量对象的测量。
解决方案
本发明的光超声波测量装置构成为,具有:超声波脉冲输出部,其输出超声波脉冲;脉冲光输出部,其输出脉冲光;反射波测量部,其将所述超声波脉冲在测量对象中反射后的反射波与时间对应起来进行测量;光声波测量部,其将因所述脉冲光而在所述测量对象中产生的光声波与时间对应起来进行测量;超过时刻获取部,其获取所述反射波的测量结果超过预定的阈值的时刻即超过时刻;以及测量结果位移部,其使所述光声波的测量结果朝向所述脉冲光的输出时刻移动第一位移时间,将在所述光声波的测量结果中与所述超过时刻对应的时刻设为对应时刻,所述第一位移时间为所述脉冲光的输出时刻到所述对应时刻为止的时间即对应时间以下。
根据如上述那样构成的光超声波测量装置,根据如上述那样构成的光超声波测量装置,超声波脉冲输出部输出超声波脉冲。脉冲光输出部输出脉冲光。反射波测量部将所述超声波脉冲在测量对象中反射后的反射波与时间对应起来进行测量。光声波测量部将因所述脉冲光而在所述测量对象中产生的光声波与时间对应起来进行测量。超过时刻获取部获取所述反射波的测量结果超过预定的阈值的时刻即超过时刻。测量结果位移部使所述光声波的测量结果朝向所述脉冲光的输出时刻移动第一位移时间。将在所述光声波的测量结果中与所述超过时刻对应的时刻设为对应时刻。所述第一位移时间为所述脉冲光的输出时刻到所述对应时刻为止的时间即对应时间以下。
此外,本发明的光超声波测量装置,也可以是,所述第一位移时间与所述对应时间之差在针对所述测量对象中的多个部位得到的多个所述光声波中相等。
此外,本发明的光超声波测量装置,也可以是,所述测量结果位移部使所述反射波的测量结果朝向所述超声波脉冲的输出时刻移动第二位移时间,所述第二位移时间为从所述超声波脉冲在所述测量对象的界面中进行反射到所述超过时刻为止的时间即超过时间以下。
此外,本发明的光超声波测量装置,也可以是,所述超过时间与所述第二位移时间之差在针对所述测量对象中的多个部位得到的多个所述反射波中相等。
此外,本发明的光超声波测量装置,也可以是,所述第一位移时间与所述第二位移时间相等。
此外,本发明的光超声波测量装置,也可以是,所述超过时刻与所述对应时刻为相同的时刻。
此外,本发明的光超声波测量装置,也可以是,具有:图像显示部,其根据所述测量结果位移部的输出,显示所述测量对象的图像。
此外,本发明的光超声波测量装置,也可以是,所述超声波脉冲输出部以及所述脉冲光输出部对所述测量对象进行扫描,进行所述扫描的方向与所述超声波脉冲和所述脉冲光的输出方向正交。
此外,本发明的光超声波测量装置,也可以是,具有多个所述脉冲光输出部,所述脉冲光输出部分别输出的所述脉冲光的波长不同。
本发明是一种光超声波测量方法,具有以下工序:超声波脉冲输出工序,输出超声波脉冲;脉冲光输出工序,输出脉冲光;反射波测量工序,将所述超声波脉冲在测量对象中反射后的反射波与时间对应起来进行测量;光声波测量工序,将因所述脉冲光而在所述测量对象中产生的光声波与时间对应起来进行测量;超过时刻获取工序,获取所述反射波的测量结果超过预定的阈值的时刻即超过时刻;以及测量结果位移工序,使所述光声波的测量结果朝向所述脉冲光的输出时刻移动第一位移时间,将在所述光声波的测量结果中与所述超过时刻对应的时刻设为对应时刻,所述第一位移时间为所述脉冲光的输出时刻到所述对应时刻为止的时间即对应时间以下。
本发明是一种用于使计算机执行光超声波测量装置中的光超声波测量处理的程序,所述光超声波测量装置具有:超声波脉冲输出部,其输出超声波脉冲;脉冲光输出部,其输出脉冲光;反射波测量部,其将所述超声波脉冲在测量对象中反射后的反射波与时间对应起来进行测量;以及光声波测量部,其将因所述脉冲光而在所述测量对象中产生的光声波与时间对应起来进行测量,所述光超声波测量处理具有以下工序:超过时刻获取工序,获取所述反射波的测量结果超过预定的阈值的时刻即超过时刻;以及测量结果位移工序,使所述光声波的测量结果朝向所述脉冲光的输出时刻移动第一位移时间,将在所述光声波的测量结果中与所述超过时刻对应的时刻设为对应时刻,所述第一位移时间为所述脉冲光的输出时刻到所述对应时刻为止的时间即对应时间以下。
本发明是一种记录有程序的计算机可读介质,该程序用于使计算机执行光超声波测量装置中的光超声波测量处理,所述光超声波测量装置具有:超声波脉冲输出部,其输出超声波脉冲;脉冲光输出部,其输出脉冲光;反射波测量部,其将所述超声波脉冲在测量对象中反射后的反射波与时间对应起来进行测量;以及光声波测量部,其将因所述脉冲光而在所述测量对象中产生的光声波与时间对应起来进行测量,所述光超声波测量处理具有以下工序:超过时刻获取工序,获取所述反射波的测量结果超过预定的阈值的时刻即超过时刻;以及测量结果位移工序,使所述光声波的测量结果朝向所述脉冲光的输出时刻移动第一位移时间,将在所述光声波的测量结果中与所述超过时刻对应的时刻设为对应时刻,所述第一位移时间为所述脉冲光的输出时刻到所述对应时刻为止的时间即对应时间以下。
附图说明
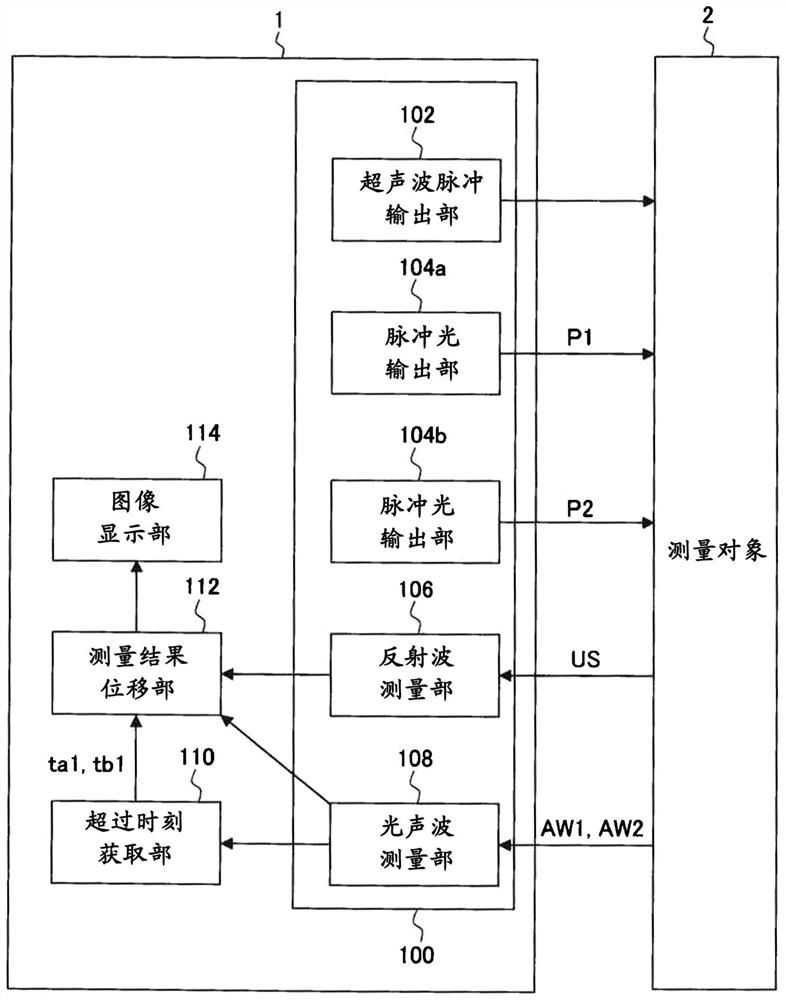
图1是表示本发明的实施方式的光超声波测量装置1的结构的功能框图。
图2是没有任何接触的情况下的测量对象(皮肤)2的剖视图。
图3是使光超声波测量装置1与测量对象2接触的情况下的测量对象2的放大剖视图。
图4是测量单元100移动到血管24a的大致正上方时的、测量单元100附近的测量对象2的放大剖视图。
图5是表示测量单元100移动到血管24a的正上方时的、反射波US的波形(图5的(a))、光声波AW1(或AW2)的波形(图5的(b))、将波形的横轴(时间)换算为距离的波形(图5的(c))的图。
图6是表示使图5的(a)的反射波US的波形移动后的波形(图6的(a))、使图5的(b)的光声波AW1(或AW2)的波形移动后的波形(图6的(b))、将波形的横轴(时间)换算为距离的波形(图6的(c))的图。
图7是表示测量单元100移动到血管24b的正上方时的、反射波US的波形(图7的(a))、光声波AW1(或AW2)的波形(图7的(b))、将波形的横轴(时间)换算为距离的波形(图7的(c))的图。
图8是表示使图7的(a)的反射波US的波形移动后的波形(图8的(a))、使图7的(b)的光声波AW1(或AW2)的波形移动后的波形(图8的(b))、将波形的横轴(时间)换算为距离的波形(图8的(c))的图。
图9是表示图像显示部114显示的图像的图。
图10是表示测量单元100进行的测量对象2的扫描的一例的立体图。
图11是使光超声波测量装置1与测量对象(皮肤)2接触的情况下的光超声波测量装置1及测量对象(皮肤)2的剖视图,表示测量单元100移动到血管24a的大致正上方的状态(图11的(a)),测量单元100移动到血管24b的大致正上方的状态(图11的(b))。
图12是测量单元100移动到血管24b的大致正上方时的、测量单元100附近的测量对象2的放大剖视图。
具体实施方式
以下,一边参照附图一边对本发明的实施方式进行说明。
图1是表示本发明的实施方式的光超声波测量装置1的结构的功能框图。本发明的实施方式的光超声波测量装置1用于对测量对象2(例如,虽然是皮肤,但并不限定于此)进行测量,具有:测量单元100、超过时刻获取部110、测量结果位移部112、以及图像显示部114。此外,以后,针对测量对象2为皮肤的情况,对本发明的实施方式进行说明。
图2是没有任何接触的情况下的测量对象(皮肤)2的剖视图。图11是使光超声波测量装置1与测量对象(皮肤)2接触的情况下的光超声波测量装置1及测量对象(皮肤)2的剖视图,表示测量单元100移动到血管24a的大致正上方的状态(图11的(a)),测量单元100移动到血管24b的大致正上方的状态(图11的(b))。
参照图2,在与测量对象(皮肤)2没有任何接触的情况下,测量对象2的界面(皮肤的表面)22为水平,处于测量对象2内的血管24a、24b、24c均处于距离界面22深度D0。此外,血管24a处于血管24b与血管24c之间。
参照图11,光超声波测量装置1具有:测量单元100、壳体120、液体130、以及框体140。壳体120收纳测量单元100,其内部被液体130(例如水)充满。在壳体120的底面配置有薄膜120a。薄膜120a与界面22接触。于是,界面22弯曲,向上凸出。框体140配置在测量单元100及壳体120的上部,收纳超过时刻获取部110、测量结果位移部112及图像显示部114。此外,将测量单元100与界面22的最高点之间的高度之差设为d0。
图3是使光超声波测量装置1与测量对象2接触的情况下的测量对象2的放大剖视图。界面22弯曲,向上凸出,因此,血管24a移动到比血管24b和血管24c靠上的位置。但是,血管24a、24b、24c的距离界面22深度都保持D0不变。在此,将从界面22的最上部观察到的血管24b以及血管24c的深度设为D1。
本来,血管24a、24b、24c应该位于相同的高度(参照图2),使光超声波测量装置1与测量对象2接触时,如上所述(参照图3),血管24a、24b、24c位于不同的高度。该状态下,测量血管24a、24b、24c的位置,即使显示在图像中,也无法掌握本来的位置。
参照图1,测量单元100具有:超声波脉冲输出部102、脉冲光输出部104a、104b、反射波测量部106、以及光声波测量部108。
超声波脉冲输出部102输出超声波脉冲。多个脉冲光输出部104a、104b输出脉冲光。此外,脉冲光输出部104a、104b各自输出的脉冲光的波长不同。但是,脉冲光输出部可以是3个以上,也可以仅是1个。
反射波测量部106将超声波脉冲在测量对象2中进行反射了所得的反射波US与时间对应起来进行测量。光声波测量部108与时间对应起来测量因脉冲光在测量对象2中产生的光声波AW1、AW2。但是,光声波AW1是因脉冲光输出部104a输出的脉冲光P1而在测量对象2中产生的光声波。另外,光声波AW2是因脉冲光输出部104b输出的脉冲光P2而在测量对象2中产生的光声波。反射波测量部106以及光声波测量部108例如是压电元件。
测量单元100的超声波脉冲输出部102及脉冲光输出部104a、104b对测量对象2进行扫描。
图10是表示测量单元100进行的测量对象2的扫描的一例的立体图。但是,在图10中,壳体120、液体130以及框体140省略图示。从测量单元100的超声波脉冲输出部102及脉冲光输出部104a、104b输出脉冲光P1、P2及超声波脉冲,在与该输出方向正交的方向(X方向及Y方向)上进行扫描。由此,测量单元100移动到血管24a、血管24b或血管24c的大致正上方。
以后,分为(1)测量单元100移动到血管24a的大致正上方的情况、(2)测量单元100移动到血管24b的大致正上方的情况,对本发明的实施方式进行说明。此外,在测量单元100移动到血管24c的正上方时,与移动到血管24b的大致正上方的情况一样,因此,省略说明。
(1)测量单元100移动到血管24a的大致正上方的情况(参照图11的(a))
图4是测量单元100移动到血管24a的大致正上方时的、测量单元100附近的测量对象2的放大剖视图。
从超声波脉冲输出部102输出的超声波脉冲主要通过界面22进行反射,作为反射波US,由反射波测量部106测量其强度。超声波脉冲输出部102及反射波测量部106与界面22的距离为d0。此外,脉冲光输出部104a、104b以及光声波测量部108与界面22的距离也为d0。
利用光声波测量部108对因从脉冲光输出部104a(或104b)输出的脉冲光P1(或P2)而在测量对象2的血管24a中产生的光声波AW1(或AW2)的强度进行测量。距离界面22的血管24a的深度为D0。
图5是表示测量单元100移动到血管24a的正上方时的、反射波US的波形(图5的(a))、光声波AW1(或AW2)的波形(图5的(b))、将波形的横轴(时间)换算为距离的波形(图5的(c))的图。
在图5的(a)中,纵轴为信号强度,横轴为时间,以超声波脉冲通过界面22进行了反射的时刻为原点。在由测量单元100的反射波测量部106接收到超声波脉冲Pa的时刻ta1,反射波US的测量结果(即,超声波脉冲Pa的信号强度)超过预定的阈值。此外,预定的阈值设定为:(1)如果反射波US是由界面22反射后的反射波,则其强度超过预定的阈值,(2)如果反射波US不是由界面22反射后的反射波,则其强度不超过预定的阈值。超过时刻获取部110获取反射波US的测量结果超过预定的阈值的时刻即超过时刻ta1。
超声波脉冲Pa的信号强度超过预定的阈值,因此,知晓在接收到超声波脉冲Pa的时刻(超过时刻ta1),能够通过反射波测量部106检测到基于界面22的反射。因此,当对超声波脉冲在测量对象2的界面22中进行反射到超过时刻ta1为止的时间(称为超过时间)乘以声速Vs时,反射波测量部106与界面22的距离为d0(Vs·ta1=d0)(其中,超过时间为ta1)。
在图5的(b)中,纵轴为信号强度,横轴为时间,以输出脉冲光P1(或P2)的时刻为原点。输出脉冲光P1(或P2)时,与输出大致同时到达血管24a。因此,输出脉冲光P1(或P2)的时刻和输出光声波AW1(或AW2)的时刻可以视为相同。在此,图5的(b)中的原点(输出脉冲光P1(或P2)的时刻)、与图5的(a)中的原点(超声波脉冲通过界面22进行了反射的时刻)是相同的时刻。将由测量单元100的光声波测量部108接收到在血管24a中生成的光声波AW1(或AW2)的光声波脉冲Pb的时刻设为ta2。于是,Vs×ta2=d0+D0。
在图5的(c)中,图示了横轴,图示了将与超过时刻ta1对应的位置(表示界面22的位置)设为0时,与接收到光声波脉冲Pb的时刻ta2对应的位置(表示血管24a的深度)为D0(=Vs·(ta2-ta1))。
测量结果位移部112使光声波AW1、AW2的测量结果朝向脉冲光的输出时刻移动第一位移时间(参照图5的(b))。在此,将在光声波AW1(或AW2)的测量结果中与超过时刻ta1对应的时刻作为对应时刻。于是,第一位移时间为脉冲光的输出时刻到对应时刻为止的时间即对应时间以下。此外,图5的(b)中的原点与图5的(a)中的原点为相同的时刻,因此,对应时刻与超过时刻ta1相同,为ta1。对应时间为ta1。
测量结果位移部112使反射波US的测量结果朝向超声波脉冲的输出时刻移动第二位移时间(参照图5的(a))。此外,超声波脉冲的输出时刻早于超声波脉冲通过界面22进行了反射的时刻。因此,当使反射波US的测量结果朝向超声波脉冲的输出时刻移动时,超声波脉冲朝向通过界面22进行了反射的时刻移动。此外,第二位移时间为超过时间ta1以下。
此外,第一位移时间与第二位移时间相等。另外,对应时间ta1与第一位移时间之差t0和超过时间ta1与第二位移时间之差t0相等(称为偏移)。
图6是表示使图5的(a)的反射波US的波形移动后的波形(图6的(a))、使图5的(b)的光声波AW1(或AW2)的波形移动后的波形(图6的(b))、将波形的横轴(时间)换算为距离的波形(图6的(c))的图。
参照图6的(a),测量结果位移部112使超声波脉冲Pa移动至偏移t0。参照图6的(b),测量结果位移部112使光声波脉冲Pb移动至时间t0+(ta2-ta1)。在图6的(c)中,图示了横轴,图示了将与偏移t0对应的位置(表示界面22的位置)设为0时,与光声波脉冲Pb移动的时刻t0+(ta2-ta1)对应的位置(表示血管24a的深度)为D0(=Vs·(t0+(ta2-ta1)-t0)=Vs·(ta2-ta1))。
图像显示部114根据测量结果位移部112的输出,显示测量对象2的图像。
图9是表示图像显示部114显示的图像的图。图像的上端与图6的(a)及图6的(b)的原点对应。这里,与存在超声波脉冲Pa的偏移t0对应的位置表示界面22的位置。于是,界面22的图像存在于从图像的上端离开Vs·t0的位置。并且,与存在光声波脉冲Pb的时刻t0+(ta2-ta1)对应的位置表示血管24a的位置。于是,血管24a的图像存在于从界面22的图像离开D0的位置。
(2)测量单元100移动到血管24b的大致正上方的情况(参照图11的(b))
图12是测量单元100移动到血管24b的大致正上方时的、测量单元100附近的测量对象2的放大剖视图。
从超声波脉冲输出部102输出的超声波脉冲主要通过界面22进行反射,作为反射波US,由反射波测量部106测量其强度。超声波脉冲输出部102及反射波测量部106、与界面22的距离为d0+(D1-D0)。此外,脉冲光输出部104a、104b以及光声波测量部108、与界面22的距离也为d0+(D1-D0)。
利用光声波测量部108对因从脉冲光输出部104a(或104b)输出的脉冲光P1(或P2)而在测量对象2的血管24b中产生的光声波AW1(或AW2)的强度进行测量。距离界面22的血管24b的深度为D0。
图7是表示测量单元100移动到血管24b的正上方时的、反射波US的波形(图7的(a))、光声波AW1(或AW2)的波形(图7的(b))、将波形的横轴(时间)换算为距离的波形(图7的(c))的图。
在图7的(a)中,纵轴为信号强度,横轴为时间,以超声波脉冲通过界面22进行了反射的时刻为原点。在由测量单元100的反射波测量部106接收到超声波脉冲Pa的时刻tb1,反射波US的测量结果(即,超声波脉冲Pa的信号强度)超过预定的阈值。此外,预定的阈值设定为:(1)如果反射波US是通过界面22反射后的反射波,则其强度超过预定的阈值,(2)如果反射波US不是通过界面22反射后的反射波,则其强度不超过预定的阈值。超过时刻获取部110获取反射波US的测量结果超过预定的阈值的时刻即超过时刻tb1。
超声波脉冲Pa的信号强度超过预定的阈值,因此,知晓在接收到超声波脉冲Pa的时刻(超过时刻tb1),能够由反射波测量部106检测到界面22进行的反射。因此,对超声波脉冲在测量对象2的界面22中进行了反射到超过时刻tb1为止的时间(称为超过时间)乘以声速Vs时,反射波测量部106与界面22的距离为d0+(D1-D0)即(Vs·tb1=d0+(D1-D0))(其中,超过时间为tb1)。
在图7的(b)中,纵轴为信号强度,横轴为时间,以输出脉冲光P1(或P2)的时刻为原点。在输出脉冲光P1(或P2)时,与输出大致同时到达血管24b。因此,输出脉冲光P1(或P2)的时刻、和输出光声波AW1(或AW2)的时刻可以视为相同。在此,图7的(b)中的原点(输出脉冲光P1(或P2)的时刻)、与图7的(a)中的原点(超声波脉冲通过界面22进行了反射的时刻)是相同的时刻。将由测量单元100的光声波测量部108接收到在血管24b中生成的光声波AW1(或AW2)的光声波脉冲Pb的时刻设为tb2。于是,Vs·tb2=d0+(D1-D0)+D0=d0+D1。
在图7的(c)中,图示了横轴,图示了将与超过时刻tb1对应的位置(表示界面22的位置)设为0时,与接收到光声波脉冲Pb的时刻tb2对应的位置(表示血管24b的深度)为D0(=Vs·(tb2-tb1))。
测量结果位移部112使光声波AW1、AW2的测量结果朝向脉冲光的输出时刻移动第一位移时间(参照图7的(a))。在此,将在光声波AW1(或AW2)的测量结果中与超过时刻tb1对应的时刻作为对应时刻。于是,第一位移时间为脉冲光的输出时刻到对应时刻为止的时间即对应时间以下。此外,图7的(b)中的原点、与图7的(a)中的原点为相同的时刻,因此,对应时刻与超过时刻tb1相同,为tb1。对应时间为tb1。
测量结果位移部112使反射波US的测量结果朝向超声波脉冲的输出时刻移动第二位移时间(参照图7的(b))。此外,超声波脉冲的输出时刻早于超声波脉冲通过界面22进行了反射的时刻。因此,当使反射波US的测量结果朝向超声波脉冲的输出时刻移动时,朝向超声波脉冲通过界面22进行了反射的时刻移动。此外,第二位移时间为超过时间tb1以下。
此外,第一位移时间与第二位移时间相等。另外,对应时间tb1与第一位移时间之差t0、和超过时间tb1与第二位移时间之差t0相等(称为偏移)。
此外,第一位移时间与对应时间之差(偏移)在针对测量对象2中的多个部位(血管24a以及血管24b)得到的多个光声波AW1(或AW2)中相等。即,针对测量对象2中的血管24a得到的光声波AW1(或AW2)中的第一位移时间与对应时间ta1之差(参照图5的(b))、和针对测量对象2中的血管24b得到的光声波AW1(或AW2)中的第一位移时间与对应时间tb1之差(参照图7的(b))均与t0相等。
另外,超过时间与第二位移时间之差(偏移)在针对测量对象2中的多个部位(血管24a正上方的界面22以及血管24b正上方的界面22)得到的多个反射波US中相等。即,针对测量对象2中的血管24a正上方的界面22得到的反射波US中的第二位移时间与超过时间ta1之差(参照图5的(a))、和针对测量对象2中的血管24b正上方的界面22得到的反射波US中的第二位移时间与超过时间tb1之差(参照图7的(a))均与t0相等。
此外,也考虑将偏移t0设为0。
图8是表示使图7的(a)的反射波US的波形移动后的波形(图8的(a))、使图7的(b)的光声波AW1(或AW2)的波形移动后的波形(图8的(b))、将波形的横轴(时间)换算为距离的波形(图8的(c))的图。
参照图8的(a),测量结果位移部112使超声波脉冲Pa移动至偏移t0。参照图8的(b),测量结果位移部112使光声波脉冲Pb移动至时间t0+(tb2-tb1)。在图8的(c)中,图示了横轴,图示了将与偏移t0对应的位置(表示界面22的位置)设为0时,与光声波脉冲Pb移动的时刻t0+(tb2-tb1)对应的位置(表示血管24b的深度)为D0(=Vs·(t0+(tb2-tb1)-t0)=Vs·(tb2-tb1))。
参照图9,图像的上端与图8的(a)及图8的(b)的原点对应。这里,与存在超声波脉冲Pa的偏移t0对应的位置表示界面22的位置。于是,界面22的图像存在于从图像的上端离开Vs·t0的位置。并且,与存在光声波脉冲Pb的时刻t0+(tb2-tb1)对应的位置表示血管24b的位置。于是,血管24b的图像存在于从界面22的图像离开D0的位置。
接着,对本发明的实施方式的动作进行说明。
通过测量单元100进行测量对象(皮肤)2的扫描。
首先,测量单元100移动到血管24a的大致正上方(参照图11的(a)及图4)。
超声波脉冲输出部102输出的超声波脉冲在测量对象2中进行反射,由反射波测量部106进行测量(反射波US)(参照图5的(a))。
利用光声波测量部108对因脉冲光输出部104a、104b输出的脉冲光而在测量对象2中产生的光声波AW1、AW2进行测量(参照图5的(b))。
超声波脉冲Pa的信号强度超过预定的阈值。由超过时刻获取部110获取反射波US的测量结果超过预定的阈值的时刻即超过时刻ta1。光声波AW1、AW2的测量结果通过测量结果位移部112,朝向脉冲光的输出时刻移动第一位移时间(比对应时间ta1短偏移t0)(参照图5的(b)和图6的(b))。另外,反射波US的测量结果朝向超声波脉冲的输出时刻移动第二位移时间(与第一位移时间相同)(参照图5的(a)及图6的(a))。
根据测量结果位移部112的输出(参照图6的(a)及图6的(b)),图像显示部114显示测量对象2的图像(参照图9)。
于是,图6的(a)及图6的(b)的原点与图9的图像的上端对应。与存在超声波脉冲Pa的偏移t0对应的位置(从图像的上端离开Vs·t0的位置)表示图9中的界面22的位置。与存在光声波脉冲Pb的时刻t0+(ta2-ta1)对应的位置(从界面22的图像离开D0的位置(参照图6的(c)))表示图9中的血管24a的位置。
接着,测量单元100移动到血管24b的大致正上方(参照图11的(b)及图12)。
超声波脉冲输出部102输出的超声波脉冲在测量对象2中进行反射,由反射波测量部106进行测量(反射波US)(参照图7的(a))。
利用光声波测量部108对因脉冲光输出部104a、104b输出的脉冲光而在测量对象2中产生的光声波AW1、AW2进行测量(参照图7的(b))。
超声波脉冲Pa的信号强度超过预定的阈值。由超过时刻获取部110获取反射波US的测量结果超过预定的阈值的时刻即超过时刻tb1。光声波AW1、AW2的测量结果通过测量结果位移部112,朝向脉冲光的输出时刻移动第一位移时间(比对应时间tb1短偏移t0)(参照图7的(b)和图8的(b))。另外,反射波US的测量结果朝向超声波脉冲的输出时刻移动第二位移时间(与第一位移时间相同)(参照图7的(a)及图8的(a))。
根据测量结果位移部112的输出(参照图8的(a)及图8的(b)),图像显示部114显示测量对象2的图像(参照图9)。
于是,图8的(a)及图8的(b)的原点与图9的图像的上端对应。与存在超声波脉冲Pa的偏移t0对应的位置(从图像的上端离开Vs·t0的位置)表示图9中的界面22的位置。与存在光声波脉冲Pb的时刻t0+(tb2-tb1)对应的位置(从界面22的图像离开D0的位置(参照图8的(c)))表示图9中的血管24b的位置。
测量单元100移动到血管24c的大致正上方时的动作与测量单元100移动到血管24b的大致正上方时相同,省略说明。
根据本发明的实施方式,能够一边补偿使超声波测量装置1与测量对象(皮肤)2接触时的、测量对象2的表面形状的变动(隆起),一边进行测量对象2的测量。
即,在与测量对象2没有任何接触的情况下,测量对象2的界面22为水平,血管24a、24b、24c的深度均为D0(参照图2)。但是,使光超声波测量装置1与测量对象2接触时,测量对象2的界面22隆起(参照图3及图11),与之相伴地,血管24a移动至比血管24b及血管24c靠上的位置。
但是,超声波脉冲通过血管24a、24b(24c也一样)的正上方的界面22进行反射而得到的超声波脉冲Pa均移动至偏移t0(参照图6的(a)及图8的(a))(移动第二位移时间),因此,界面22显示为水平(参照图9)。而且,通过血管24a、24b(24c也一样)得到的光声波AW1(或AW2)的光声波脉冲Pb也移动相同的时间(第一位移时间(与第二位移时间相等))(参照图6的(b)以及图8的(b)),因此,血管24a、24b(24c也一样)的深度均显示为D0(参照图9)。
另外,上述的实施方式能够以如下方式实现。在具有CPU、硬盘、介质(USB存储器、CD-ROM等)读取装置的计算机中,读取记录了实现上述各部分,例如超过时刻获取部110、测量结果位移部112、图像显示部114的程序的介质,安装到硬盘中。通过这样的方法,也能够实现上述的功能。
附图标记说明
1 光声波测量装置;
100 测量单元;
102 超声波脉冲输出部;
104a、104b 脉冲光输出部;
106 反射波测量部;
108 光声波测量部;
110 超过时刻获取部;
112 测量结果位移部;
114 图像显示部;
120 壳体;
130 液体;
140 框体;
2 测量对象(皮肤);
22 界面;
24a、24b、24c 血管;
US 反射波;
AW1、AW2 光声波;
Pa 超声波脉冲;
Pb 光声波脉冲;
D0 深度;
ta1、tb1 超过时刻;
ta1、tb1 超过时间;
ta1、tb1 对应时刻;
ta1、tb1 对应时间;
t0 偏移。
- 光超声波测量装置、方法、程序、记录介质
- 信息记录装置、信息记录程序、记录有信息记录程序的记录介质、记录介质、信息记录方法、信息再生装置、信息再生方法、信息再生程序和记录有信息再生程序的记录介质