遥控骨钻
文献发布时间:2023-06-19 13:51:08
技术领域
本发明涉及一种遥控骨钻。
背景技术
骨钻是外科手术中在骨骼上钻孔用的电动工具,其可以在骨骼上为医生提供合适位置、合适角度和合适深度的置钉通道。现有的骨钻一般为手持式骨钻,使用时依靠医生手动握持操作。如此,在骨科手术的置钉环节中,医生需要手持骨钻完成病人骨骼的钻孔工作,这就使得其无法确切知晓钻头达到的深度,只能通过骨钻穿透骨骼一瞬间的落空感来判断是否穿透骨骼。这种依赖于医生的经验和手感判断的方式对于钻孔深度的控制极不准确,若钻孔深度不够,则置钉达不到固定效果;若钻孔深度过深至穿透骨骼,则可能伤及其他组织,进而导致医疗事故。
针对于钻孔深度的控制,一些技术使用C型臂机X光机做深度透射的反馈的方式来判断钻孔深度。但是,由于X光存在辐射,医生在每次钻孔后均需要撤出手术室后再启动C型臂X光机透射,在看到钻孔状态后再做调整。如此,一台手术往往需要反复透射、多次钻孔才能准确地控制深度。这就会导致医生需要反复进出手术室,从而造成操作繁复,导致手术时间较长、病人开创时间较久,而增加手术出血和事故的风险。当然,也有一些技术通过在骨钻上设置智能传感器的方式来判断是否穿透骨骼,若穿透骨骼则骨钻自动停止。但是,这种方式属于间接判断,因此无法真正看到钻头位置,若患者存在骨质疏松或者骨质异常等情况,则极易出现误判,导致更严重的后果。
发明内容
本发明的目的在于提供一种遥控骨钻。
为实现上述发明目的,本发明提供一种遥控骨钻,包括钻头、进给装置、控制器,所述钻头和所述控制器均设置在所述进给装置上。
根据本发明的一个方面,还包括遥控器,所述遥控器与所述控制器之间可通信;
所述遥控器上设有使能按钮;
当所述使能按钮和其他按钮同时按下,或者,先按下所述使能按钮再按下其他按钮时,所述遥控器向所述控制器发出相应指令;
所述使能按钮每次被按下只支持一个指令的发出,所述控制器每次响应一个指令,且在每个指令动作执行完成5秒后响应下一指令。
根据本发明的一个方面,还包括无线中继器,所述无线中继器包括第一、第二无线收发器;
第一无线收发器与所述控制器通过无线连接,第二无线收发器与所述遥控器通过无线连接,所述第一、第二无线收发器之间通过电缆连接。
根据本发明的一个方面,所述控制器包括无线通讯电路。
根据本发明的一个方面,还包括控制线缆,所述遥控器与所述控制器通过所述控制线缆连接。
根据本发明的一个方面,所述控制器包括串口通讯电路。
根据本发明的一个方面,所述控制线缆中具有使能信号线;
当所述使能按钮被按下时,所述使能信号线产生1kHz方波信号。
根据本发明的一个方面,所述进给装置上设有连接头;
所述连接头包括底座以及设置在所述底座上的锁紧螺丝和定位孔。
根据本发明的一个方面,还包括支架,所述支架包括架体、调节杆和夹头;
所述进给装置通过所述连接头连接在所述调节杆上。
根据本发明的一个方面,所述进给装置通过所述连接头与手术机器人的机械臂连接。
根据本发明的一个方面,所述钻头包括直流电机和锁紧头,所述进给装置包括丝杠、直线滑轨和步进电机;
所述控制器包括控制芯片以及分别与所述钻头的直流电机和所述进给装置的步进电机连接的钻头驱动电路和进给驱动电路。
根据本发明的一个方面,所述控制芯片为单片机。
根据本发明的一个方面,所述遥控器上还设有用于控制启动钻头、关闭钻头、前进5mm、后退5mm、前进0.5mm、后退0.5mm的按钮。
根据本发明的构思,采用遥控器与钻头相分离的远程控制方式,可由无线中继器穿过手术屏蔽房实现无线穿墙遥控,也可通过控制线缆实现有线遥控。相对于没有远程遥控的一体化现有产品而言,医生可以在手术室外部通过监视器观察C型臂X光机实时的透视结果,从而精确控制钻孔深度,以缩短置钉时间。
根据本发明的一个方案,相对于没有单片机而只采用按钮控制运行的现有产品而言,本发明通过设定单片机的程序来控制骨钻运行,并且在有线的方式中还设计了动态的方波信号以实现按键使能控制。
根据本发明的一个方案,相对于需要手动握持且没有与其他医疗器械的机械接口的现有产品而言,本发明在进给装置上还设置了一个可与万向固定支架或手术机器人的机械接口,从而便于钻头等部件的安装及调节。
附图说明
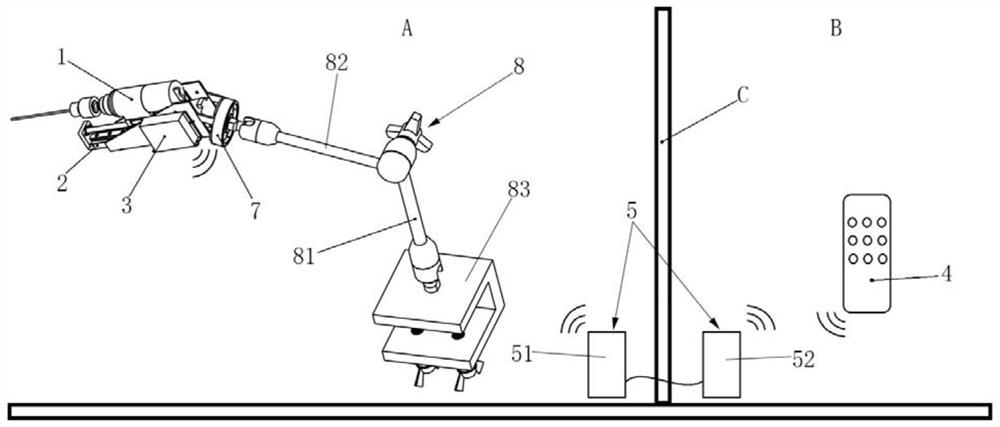
图1示意性表示本发明第一种实施方式的遥控骨钻的组成图;
图2示意性表示本发明第二种实施方式的遥控骨钻的组成图;
图3表示本发明一种实施方式的遥控骨钻的信号处理波形示意图;
图4表示本发明一种实施方式的钻头、进给装置、连接头的配合示意图。
具体实施方式
为了更清楚地说明本发明实施方式或现有技术中的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是本发明的一些实施方式,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
在针对本发明的实施方式进行描述时,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”所表达的方位或位置关系是基于相关附图所示的方位或位置关系,其仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对本发明的限制。
下面结合附图和具体实施方式对本发明作详细地描述,实施方式不能在此一一赘述,但本发明的实施方式并不因此限定于以下实施方式。
参见图1,本发明的遥控骨钻为机械、电子、软件结合的有源医疗器械,其包括钻头1、进给装置2、控制器3和遥控器4。其中,钻头1和控制器3均设置在进给装置2上,遥控器4与控制器3之间可通信。如此,本发明也采用了C型臂机X光机做深度透射的反馈机制,使得医生能够直接看到钻头1的进给深度。并且,还使用了远程控制(无线遥控/线控)方式,使医生可以在手术室A的铅屏蔽墙C外的控制室B内利用遥控器4控制骨钻,从而不必进入手术现场即可精确控制钻孔深度。
本发明中,进给装置2上还设有连接头7,其用于使进给装置2与其他器械快速连接。
在本实施方式中,遥控骨钻还包括支架8,支架8包括架体81、调节杆82和夹头83。进给装置2通过连接头7连接在调节杆82上。由此,支架8形成一个可以调节任意空间位置和角度的万向架,再配合连接头7的设置可以方便进给装置2快速的固定到调节杆82的末端,而支架8底部的夹头83可以夹在手术床上形成固定。当然,上述实施方式是由医生手动调整钻头1的位置和角度,而在其它实施方式中,进给装置2还可通过连接头7与手术机器人的机械臂末端连接,从而由手术机器人提供精确定位和支撑。此外,本发明的遥控骨钻可以通过电池或网电源适配器供电。
钻头1包括直流电机和锁紧头(即钻头锁紧夹头),从而可以为钻具提供机械动力。如图4所示,进给装置2包括丝杠21、直线滑轨22和步进电机23,从而可以搭载钻头1沿其轴线方向前进或者后退。连接头7则包括底座7a以及设置在底座7a上的锁紧螺丝71和定位孔72。控制器3包括控制芯片以及分别与钻头1的直流电机和进给装置2的步进电机连接的钻头驱动电路和进给驱动电路(即步进电机驱动器),其中,控制芯片为单片机。钻头1、进给装置2和控制器3可由金属外壳及相应的结构件紧密固定。
遥控器4上设有用于控制启动钻头、关闭钻头、前进5mm、后退5mm、前进0.5mm、后退0.5mm等按钮。此外,为了防止医生操作失误,本发明还在遥控器4上设置了使能按钮。如此,只有当使能按钮和其他按钮同时按下,或者,先按下使能按钮再按下其他按钮时,遥控器4才向控制器3发出相应指令信号,再由控制器3执行此指令并控制钻头1和进给装置2动作。并且,本发明中,使能按钮每次按下只支持一个指令,即,每次动作执行完成后,使能按钮需弹起后再次按下才有效,从而防止医生长按使能按钮期间导致的误触发。同时,控制器3也具备相应的防护功能,具体为,其在每次动作执行完成后需间隔5秒才响应下一个指令,且每次只执行一个指令,从而可以防止骨钻被超预期使用。
在如图1所示的实施方式中,遥控骨钻采用无线遥控的方式,因此其还包括无线中继器5,无线中继器5包括第一、第二无线收发器51,52,二者分别设置在手术室A和控制室B内。第一无线收发器51与控制器3通过无线连接,第二无线收发器52与遥控器4通过无线连接,第一、第二无线收发器51,52之间通过电缆连接实现通讯。为了接收无线信号,在本实施方式中,控制器3中具有无线通讯电路。
在如图2所示的实施方式中,遥控骨钻采用线控的方式,因此其还包括控制线缆6,遥控器4与控制器3即通过控制线缆6连接。在本实施方式中,控制器3中具有串口通讯电路,从而可通过串口通讯电路及控制线缆6与遥控器4连接。并且,控制线缆6中具有使能信号线,这样,当使能按钮被按下时,使能信号线可产生动态的1kHz方波信号。当然,只有当线路连接完好时,控制器3才能收到1kHz的信号,从而可以防止断线或者短路等意外情况的发生。本实施方式的信号处理逻辑如图3所示,图中A、B、C、D、E为五种可能的波形图,而只有波形A的是控制器3认可的有效“进给按钮”信号。其他波形则均无法实现指令的发出,具体而言,波形B的使能信号滞后于“进给按钮”信号;波形C的使能信号频率不符合1kHz要求;波形D的使能信号没有任何动作;波形E的使能信号处于低电平,并且也不符合也符合1kHz要求。
根据本发明的一种实施方式,遥控骨钻在使用时,先由医生做好皮肤开口,并将钻头1等部件固定在支架8上,调整好钻头1的位置和角度后拧紧支架8,使其保持当前状态,使钻头1紧贴在骨表面。此时,医护人员全部撤离到手术室A外,通过C型臂X光机的工作站显示器上观察钻头1和骨头的位置关系,最后即可通过遥控器4操作钻孔。具体的,先按下遥控器4的“启动钻头”按钮,遥控器4将指令通过无线通讯发给手术室A外的第二无线收发器52,第二无线收发器52通过电缆穿过铅屏蔽墙C将指令传递给第一无线收发器51,第一无线收发器51通过无线通讯将指令传递给控制器3。当然,在有线遥控的方式中,则由遥控器4将指令直接通过控制线缆6传递给控制器3。
控制器3接到指令后启动钻头1,医生再根据在工作站显示器上观察到的钻头1的位置,按需按下遥控器4上的按钮,如按下“前进5mm”按钮,钻头1会在进给装置2的带动下向骨头内部进给5mm,当医生观察到钻头1快要接近目标位置时,按下“前进0.5mm”按钮,钻头1会在进给装置2的带动下向骨头内部进给0.5mm,以达到微调的目的。如果未达到目标位置,则可以再次通过遥控器4控制钻头1再向骨头内部进给0.5mm,直至达到理想的置钉深度,再按下“关闭钻头”按钮,控制钻头1停止工作。
最后,医护人员可以再次进入手术室A,并沿着钻头1将骨钉置入,待骨钉置入完成后可以通过遥控器4上的“启动钻头”、“后退5mm”、“后退0.5mm”等按钮控制钻头1退出。
综合来讲,本发明采用了遥控器与钻头相分离的设计,实现无线遥控或有线遥控,相对于只能由人工现场操作而不能遥控和实时透视的现有产品而言,使得医生可以在X光机的连续透视下进行工作,从而在保证钻孔精度的同时,能够缩短手术时间。并且,本发明还设计了相应的防误触发功能,从而可以防止医生的人为操作失误或者接线短路和断路导致钻过头或者失控。而本发明采用单片机控制,从而可以在程序上设定比较完整的保护机制,使每一操作都可在X光机的监视下进行。遥控骨钻的固定方式则可以为与万向固定支架连接,也可以是与手术机器人连接,从而可完成任意姿态的准确调节,可使钻头近距离固定在人体骨表面,避免了人工握持的操作不稳定的问题。
以上所述仅为本发明的一个实施方式而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包括在本发明的保护范围之内。