基于MIMO雷达的舰船图像电磁散射特征闪烁的精确校正方法
文献发布时间:2023-06-19 18:29:06
技术领域
本发明涉及舰船电磁散射特征闪烁校正领域,特别涉及基于MIMO雷达的舰船图像电磁散射特征闪烁的精确校正方法。
背景技术
长期以来,对海面舰船等目标的探测成像是雷达在海洋探测应用领域的重要研究方向,在雷达图像中可直观呈现舰船目标的电磁散射特征,并可从中测量目标的形状、尺寸等信息。然而,由于实际场景中存在目标电磁散射特征闪烁问题,雷达对舰船的成像结果中会出现目标失真、虚假,甚至严重的图像畸变。事实上,由于目标电磁散射强度主要由雷达散射截面积(Radar Cross Section,RCS)线性决定,产生舰船电磁散射特征闪烁现象的首要因素是舰船在雷达径向的RCS改变,其原因是散射面元入射、反射电磁矢量的不断变化。对此,相关研究主要通过对目标RCS建模的方式补偿电磁散射特征闪烁现象。
针对目标RCS建模,文献(Iervolino P,Guida R,Whittaker P.A Model for theBackscattering From a Canonical Ship in SAR Imagery.IEEE Journal of SelectedTopics in Applied Earth Observations and Remote Sensing,vol.9,no.3,pp.1163-1175,2016.)在研究中分析了目标的静态平稳RCS特征,并基于几何光学法(GeometricalOptics,GO)展开建模与计算,但未考虑雷达视角变化、散射面元遮挡、目标运动等问题带来的模型误差。对此,文献(张居凤,冯德军,王雪松等.雷达目标动态RCS仿真研究.系统仿真学报,2005,04:65-68.)通过插值方法获取了目标RCS随各类运动的变化规律,在全方位静态RCS模型的基础上加入运动分析结果,但插值操作易带来较大误差,使得RCS模型精度降低。相关研究(Tang B,Chen H,Huang L,et al.Dynamic radar cross-sectioncharacteristic analysis of wind turbine based on scaled modelexperimental.Turkish Journal of Electrical Engineering&Computer Sciences,vol.27,pp.4689-4701,2019.)、(Wang C,Wang Y,Li S B.Inverse synthetic apertureradar imaging of ship targets with complex motion based on match fouriertransform for cubic chirps model.IET Radar Sonar&Navigation,vol.7,no.9,pp.994-1003,2013.)中通过构造目标的运动响应函数,建立了入射、反射电磁矢量与运动的关联模型,描述目标RCS随运动的时变特征,提高了动态RCS模型的精度。在此基础上,为了进一步提高模型在高海况场景中的适用性,等效电磁流法、远近场RCS算法、RCS几何光学法等被相继提出,可针对不同发射频谱、不同雷达极化方式、不同视角入射电磁波的复杂场景进行有效建模。同时,在相关研究(Shi F Y,Li Z Q,Zhang M,et al.Analysis andsimulation of the Micro-Doppler signature of a ship with a rotating shipborneradar at different observation angles.IEEE Geoscience and Remote SensingLetters,vol.19,pp.1-5,2022)、(Zhao Y,Zhang M,Chen H,et al.Radar ScatteringFrom the Composite Ship-Ocean Scene:Doppler Spectrum Analysis Based on theMotion of Six Degrees of Freedom.IEEE Transactions on Antennas andPropagation,vol.62,no.8,pp.4341-4347,2014.)中针对雷达观测视角、舰船微多普勒频谱等RCS误差因素展开分析研究,并提出了几何光学-物理光学法(Geometrical opticsand Physical optics,GO-PO)等RCS计算方法,但未结合真实雷达系统观测到的成像结果进行相应补偿。此外,在海面实际应用场景中,舰船目标的电磁反射信号是由分布在舰船上或强或弱的多处散射区域合成的,雷达系统需要准确获知舰船上各个散射区域的精确分布与实时变化,这对动态RCS建模的实时性和精度提出了更高的要求。对SAR、ISAR体制而言,合成孔径时间限制了对舰船RCS的实时估计,并且在合成孔径机制下这种偏差会在采样时间内积累,进一步恶化探测成像结果。
相比之下,MIMO雷达具有高效的信号收发机制,能够实现单快拍或少量快拍成像,可对电磁散射特性变化做出快速分析与建模,避免误差随采样时间积累,更适用于实际海面应用。但是,MIMO雷达图像依然会出现目标散射特性的恶化或扭曲现象,其原因在于:一方面,对雷达系统而言,由于平台运动导致雷达视线的可变性、不同观测通道的径向互异性(Wang W,Hu Z Y,Huang P.3-D MIMO radar imaging of ship target with rotationalmotions.Radioengineering,vol.28,no.4,pp.776-784,2019.),舰船散射面元在雷达径向及每个收发阵元观测通道内的有效RCS投影不断变化,带来一定的建模误差。另一方面,场景中舰船复杂运动引起电磁散射的不规则偏移,也会造成RCS闪烁,使得所建模型与舰船真实电磁散射特征间仍存在偏差,最终导致雷达图像出现畸变。因此,目前的舰船目标成像结果还存在电磁散射特征闪烁偏差,从而导致MIMO雷达对运动舰船目标的成像精确度低的问题。
发明内容
本发明目的是为了解决现有的舰船目标成像结果还存在电磁散射特征闪烁偏差,从而导致MIMO雷达对运动舰船目标的成像精确度低的问题,而提出了基于MIMO雷达的舰船图像电磁散射特征闪烁的精确校正方法。
基于MIMO雷达的舰船图像电磁散射特征闪烁的精确校正方法具体过程为:
步骤一、获取MIMO雷达探测的舰船目标回波;
所述散射面元为对舰船模型成像区域划分的网格剖分获得;
步骤二、获取MIMO雷达探测的舰船目标回波与各散射面元电磁散射特征、位置间的时变关联模型;
步骤三、利用步骤二获得的时变关联模型,依据RCS分析构造散射面元电磁散射与MIMO雷达不同观测通道、不同观测视角的时变关联特征;
所述时变关联特征通过如下方式获得:利用收发阵元构成的虚拟通道获得散射面元在虚拟等效阵元下的有效截面积S
步骤四、根据步骤三获得的时变关联特征对散射面元进行可见性分析,获得对入射电磁波和一次反射波可见且不被其它面元遮挡的散射面元;
步骤五、根据步骤四获得的对入射电磁波和一次反射波可见且不被其它面元遮挡的散射面元构造补偿字典并对雷达回波信号进行滤波处理,消除雷达接收信号中的中一次反射波的回波信号并补偿纠正回波探测偏差,然后利用稀疏成像算法对舰船目标进行成像获得雷达成像结果;
步骤六、基于步骤五获取的雷达成像结果,进一步消除舰船运动造成的散射面元电磁散射特征散焦或失真问题。
进一步地,所述步骤一中的获取MIMO雷达探测的舰船目标回波,包括以下步骤:
步骤一一、构建舰船模型并对舰船模型成像区域划分网格,然后将划分的网格剖分为多个散射面元;
其中,依据雷达的自身分辨率对舰船模型成像区域划分网格;
步骤一二、采用物理光学法获得散射面元的RCS特征,根据散射面元的RCS特征获取各散射面元对入射波的可见性,从而获得静止时刻t
其中,S
步骤一三、利用步骤一二获得的各散射面元的电磁散射强度σ
其中,τ
进一步地,所述步骤二中的获取MIMO雷达探测的舰船目标回波与各散射面元电磁散射特征、位置间的时变关联模型,如下式:
其中,
进一步地,所述步骤三中的利用步骤二获得的时变关联模型,依据RCS分析构造散射面元电磁散射与MIMO雷达不同观测通道、不同观测视角的时变关联特征,包括以下步骤:
步骤三一、获取收发阵元构成的虚拟通道:
S
S
其中,S
步骤三二、针对步骤三一获得的收发阵元构成的虚拟通道获取散射面元在虚拟等效阵元下的有效截面积S
h
其中,h
步骤三三、根据步骤三二获得的S
进一步地,所述步骤三三中的散射面元电磁散射与MIMO雷达不同观测通道、不同观测视角的时变关联特征,如下式:
进一步地,所述步骤四中的根据步骤三获得的时变关联特征对散射面元进行可见性分析,获取获得对入射电磁波和一次反射波可见且不被其它面元遮挡的散射面元,具体如下:
①对每个散射面元遍历进行对入射波的直接可见性分析:若散射面元的法向量满足n·LOS≥0,则该散射面元对入射波可见;若散射面元的法向量不满足n·LOS≥0,则该散射面元处于电磁入射波的非照明区域;
②两两散射面元之间的遮挡判断:若
③判断散射面元的一次反射波可见性:当散射面元k
其中,判断其它的散射面元是否对
进一步地,所述步骤五中的根据步骤四获得的获得对入射电磁波和一次反射波可见且不被其它面元遮挡的散射面元构造补偿字典并对雷达回波信号进行滤波处理,消除雷达接收信号中一次反射波的回波信号并补偿纠正雷达视角、通道互异性造成的回波探测偏差,然后利用稀疏成像算法对舰船目标进行成像获得雷达成像结果,包括以下步骤:
步骤五一、利用步骤四获得的散射面元构建补偿字典并对MIMO雷达回波信号进行滤波处理,构造网格向量H;
所述步骤四获得的散射面元为获得对入射电磁波和一次反射波可见且不被其它面元遮挡的散射面元;
首先,获取MIMO雷达回波:
其中,q是一次反射波的路径标号,Q是一次反射波的路径总数,A
然后,利用步骤四获得的散射面元获取信号收发过程中潜在的伪影路径
步骤五二、确定H中每个元素的权值:
利用以下公式对每个散射面元的视角方向寻找
其中,
步骤五三、利用步骤五二确定每个元素的权值后的H和公式(13)获得MIMO雷达回波,进而构建构建补偿字典A
步骤五四、基于步骤五三构建的补偿字典对雷达接收的回波进行处理,将公式(13)转换为如下公式:
步骤五五、利用公式(15)构造稀疏重构优化问题,采用稀疏成像算法获得雷达成像结果。
进一步地,所述步骤五三中的利用步骤五二确定每个元素的权值后的H和公式(13)获得MIMO雷达回波,进而构建补偿字典A
其中,U表示在三维场景中划分的网格总数目,且
进一步地,所述步骤六中的基于步骤五获取的雷达成像结果,进一步消除舰船运动造成的散射面元电磁散射特征散焦或失真,包括以下步骤:
步骤六一、获得MIMO雷达回波信号中的多普勒频移:
其中,V=(v
步骤六二、根据步骤六一获得的多普频移获取舰船运动对雷达回波信号相位造成的散射面元位置偏移ΔR:
f
其中,ΔR表现为面元的三维坐标偏移量Δx,Δy,Δz;
步骤六三、获取舰船在海面的偏转角度:
θ
其中,roll是横摇模式,pitch是纵摇模式,yaw是艏摇模式,i是转动模式,A
步骤六四、利用步骤六三获得的舰船在海面的偏转角度获取舰船Roll、Pitch、Yaw运动的X、Y、Z三维坐标系旋转矩阵Ω
其中,r为roll的缩写,p为pitch的缩写,y为yaw的缩写;
步骤六五、根据步骤六四获得的Ω
步骤六六、根据步骤六五获得的坐标偏移量消除散射面元电磁散射特征畸变。
进一步地,所述步骤六六中的根据步骤六五获得的坐标偏移量消除散射面元电磁散射特征畸变,具体为:
首先,利用(19)~(21)可得到舰船在每个采样时刻的偏转角度;
然后,获取散射面元散射中心的三维位置偏转矢量Δr
其中,Δr
最后,利用公式(6)根据偏转角度和偏转方向对每个散射面元电磁散射特征进行补偿,消除散射面元电磁散射特征畸变。
本发明的有益效果为:
本发明通过分析和补偿造成舰船RCS失真的相关因素,提出了一种有效的舰船目标电磁散射特征校正策略。本发明分析了MIMO雷达观测通道、LoS角度和舰船运动等因素造成的RCS偏差机理,提出了基于MIMO雷达的RCS校正方案来修正图像中的散射闪烁问题。本发明重点针对每个面元对入射电磁波和一次反射波的可见性变化,提出判断与修正方法,实现了在不同视距或观测通道中的主动补偿。本发明通过分析回波中的微多普勒频移特征,表征了面元RCS与舰船旋转角度、散射中心位置偏移的关联特征,有效减小了由不规则舰船运动引起的雷达图像电磁散射特征偏移。本发明解决了MIMO雷达对海面运动舰船探测时存在的电磁散射畸变或失真问题,消除了舰船目标成像结果中的电磁散射特征闪烁偏差,提升了MIMO雷达对运动舰船目标的成像精确度。
附图说明
图1(a)是实验中所用的舰船模型图;
图1(b)是MIMO雷达对目标模型在静态下的俯视成像结果图;
图1(c)是MIMO雷达对目标模型在静态下的侧视成像结果图。
图2(a)是不同视角下的散射面元RCS投影图;
图2(b)是散射面元偏转不同角度后的RCS特征变化图;
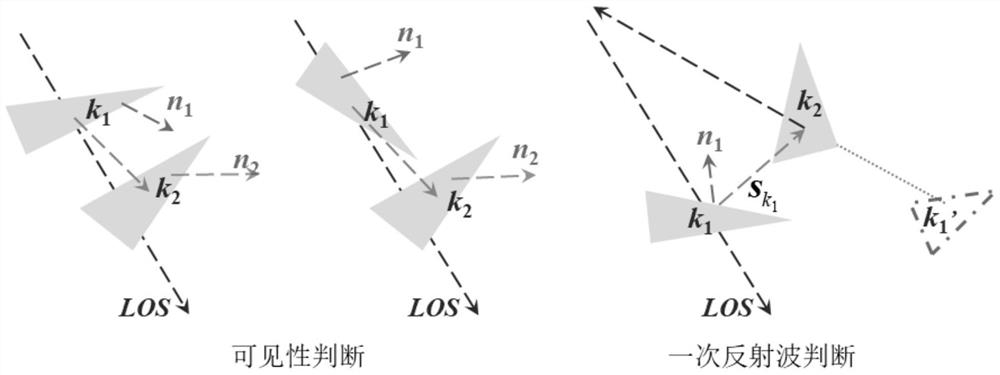
图3是散射面元可见性分析原理示意图;
图4(a)是某驱逐舰的多普勒频谱特征分析结果图;
图4(b)是某航空母舰的多普勒频谱特征分析结果图;
图5(a)-图5(b)是未进行补偿时在近俯视状态下对舰船目标的成像结果在XY面、XZ面的投影图;
图5(c)-图5(d)是对图5(a)、图(b)的补偿结果图;
图6(a)-图6(b)是未进行补偿时在近侧视状态下对舰船目标的成像结果在XY面、XZ面的投影图;
图6(c)-图6(d)是对图6(a)、6(b)的补偿结果图;
图7(a)是不同阵元间距下的多通道RCS损失图;
图7(b)是对散射面元散射强度的校正结果图;
图8(a)-图8(b)是存在一次反射波的舰船目标图像在XY面、XZ面的投影图;
图8(c)-图8(d)是对一次反射波的RCS偏移修正结果;
图9(a)-图9(b)是t=6.3s时的未进行补偿的运动舰船成像结果在XY面与XZ面的投影图;
图9(c)-图9(d)是对图9(a)、图9(b)的RCS修正结果图;
图10(a)-图10(b)是t=10.1s时的未进行补偿的运动舰船成像结果在XY面与XZ面的投影图;
图10(c)-图10(d)是对图10(a)、图10(b)的RCS偏差修正结果图。
具体实施方式
对于舰船这类电大尺寸目标,它的电磁散射特征由船体各处散射面元共同构成。目标散射面元的RCS是表征散射面元回波电磁散射强度的重要物理量,它代表散射面元散射的回波功率与入射波功率密度之比的4π倍,即散射面元的RCS与其电磁散射能量系数成正比。因此,相关文献中对平稳舰船RCS的建模与计算进行了充分研究,利用物理光学法、边缘绕射理论等提出了较为精确的建模技术。在Stratton-Chu积分的基础上,基于高频近似、远场近似与切平面近似特性,目标的单站RCS计算可化简为:
其中K表示舰船散射面元的总数目,λ为雷达信号波长,r
具体实施方式一:本实施方式基于MIMO雷达的舰船图像电磁散射特征闪烁的精确校正方法具体过程为:
步骤一、获取MIMO雷达探测的舰船目标回波:
步骤一一、构建舰船模型(如图1(a)-图1(c)),并对舰船模型成像区域划分网格,然后将划分的网格剖分为多个散射面元;
其中,依据雷达的自身分辨率对舰船模型成像区域划分网格;
步骤一二、基于物理光学法等测量散射面元的RCS特征,根据散射面元的RCS特征获取各散射面元对入射波的可见性,从而获得静止时刻t
其中,S
步骤一三、利用步骤一二获得的各散射面元的电磁散射强度σ
其中,τ
步骤二、获取MIMO雷达探测的舰船目标回波与各散射面元电磁散射特征、位置间的时变关联模型:
结合之前的研究(Wang W,Hu Z Y,Huang P.3-D MIMO radar imaging of shiptarget with rotational motions.Radioengineering,vol.28,no.4,pp.776-784,2019.),在进行去载波处理与匹配滤波过程后,可得三维场景中MIMO雷达回波与各散射面元电磁散射特征、位置间的时变关联模型:
其中,
由于舰船整体的RCS由船体各个散射面元共同组成,通过雷达成像技术处理回波并计算各散射面元的电磁散射特征,如图1(b)、(c)所示,直观呈现对目标的探测结果,可从中观察目标尺寸、形状等信息。然而在实际应用场景中,由于散射面元的电磁散射特征闪烁现象,真实雷达图像中目标或畸变、或失真,甚至部分散射面元信息丢失,如图2(a)所示,造成该现象的主要原因包括:一方面,MIMO雷达自身视角的变化、不同通道观测互异性不可忽略,在任意两个观测方向LOS1和LOS2上获取的散射面元RCS特征存在差异,导致雷达图像中目标电磁散射强度σ与真实情况存在偏差。另一方面,舰船自身晃动导致其散射面元与LOS1夹角不断改变,引起散射面元径向有效RCS不断变化,散射面元S运动至S’后,其法向量n与雷达视角LOS1的空间夹角由β
步骤三、利用步骤二获得的时变关联模型,依据RCS分析构造散射面元电磁散射与MIMO雷达不同观测通道、不同观测视角的时变关联特征,包括以下步骤:
步骤三一、获取收发阵元构成的虚拟通道:
首先,在时变关联模型中考虑到了不同收发通道并构造了相应的阵元导向矢量,可适用于MIMO雷达等较多收发通道的载体平台,而每个虚拟通道中获取的RCS径向投影实际由各通道的观测矢量所决定。
收发阵元构成的虚拟通道如下:
S
S
其中,S
由此可得,每个阵元对应的有效截面积与该阵元的观测方向、雷达视线方向有关。
步骤三二、针对步骤三一获得的收发阵元构成的虚拟通道获取散射面元在虚拟等效阵元下的有效截面积S
h
其中,h
步骤三三、根据步骤三二获得的S
同时,对于式中雷达自身视角φ变化引起的RCS探测偏差,往往可借助平台搭载的惯导系统及时获取雷达平台的位置、姿态变化,在构造的坐标系中更新雷达观测向量LoS。
步骤四、根据步骤三获得的时变关联特征对散射面元进行可见性分析,获得对入射电磁波和一次反射波可见且不被其它面元遮挡的散射面元:
随着雷达视角的改变,对舰船目标则需要判断每个散射面元在该视角下对入射波的可见性变化,然后依据式(1)、(2)实现对图像中散射面元RCS闪烁现象的主动补偿。其中可见性(或遮挡)判定条件为:
①对每个散射面元遍历进行对入射波的直接可见性分析:散射面元的法向量满足n·LOS≥0,则该散射面元对入射波可见,若该条件不满足,说明该面元处于电磁入射波的非照明区域;
②两两散射面元之间的遮挡判断:对散射各面元散射中心两两进行判断,两散射面元散射中心连成的向量满足
其中,r
③判断散射面元的一次反射波可见性:k
其中,n
若考虑一次反射波的二次反射过程中不存在其它散射面元遮挡,此时存在两种情况,其一是两个散射面元之间的间距低于雷达分辨率,一次反射波的路径较短,主要会对散射面元散射信号的RCS增益产生影响;其二是两散射面元之间的间距较大,一次反射波的路径较长,对散射回波中的RCS增益与时延均会产生影响,尤其如图3所示,在雷达视线的延长路径上产生伪影,而在本发明中,重点考虑后者,即考虑如何消除两散射面元间距较大时的产生的伪影。
步骤五、根据步骤四获得的对入射波或一次反射波可见的散射面元构造补偿字典并对雷达回波信号进行滤波处理,消除雷达接收信号中一次反射波的回波信号并补偿纠正雷达视角、通道互异性造成的回波探测偏差,并利用稀疏成像算法对舰船目标进行程成获得雷达成像结果,包括以下步骤:
步骤五一、根据步骤四获得的可见性分析结果构造补偿字典并对MIMO雷达回波信号进行滤波处理,构造0,1加权网格向量H;所述依据离线构造的静态舰船平稳RCS模型,可首先依据可见性分析结果恢复出图像中本被遮挡的散射面元电磁散射特征。然后,需要考虑对一次反射波伪影的消除。在进行去载波处理与匹配滤波过程后,真实的MIMO雷达回波可表述为:
其中,q是一次反射波的路径标号,Q是一次反射波的路径总数,A
基于③中对一次反射波的可见性分析与判断,可获取信号收发过程中潜在的伪影路径
步骤五二、结合(7)进一步构造补偿字典A
其中,H的每个元素为依据
步骤五三、确定H中每个元素的权值:
结合雷达对每个散射面元的视角方向寻找
其中,
步骤五四、基于(8)中的补偿字典,预先对MIMO雷达接收的回波进行处理,如此便将(7)中的模型转换为:
在该模型中,通过补偿处理可以将原字典中一次反射波的相关回波信号滤除,同时可以纠正雷达多通道互异性带来的探测偏差。
步骤五五、利用公式(10)构造稀疏重构优化问题,采用稀疏成像算法实现对舰船目标的有效成像获得雷达成像结果。
步骤六、基于步骤五获取的雷达成像结果,进一步消除舰船运动造成的散射面元电磁散射特征散焦或失真,包括以下步骤:
基于雷达成像所得的结果,由前文的分析可知,舰船的线性运动与Roll、Pitch、Yaw等转动会带来雷达回波中的微多普勒频移使得图像失真,并引起面元不规则偏转导致其RCS畸变,即
舰船微多普勒频率会使得回波中的真实相位出现偏差,致使雷达对目标位置的解算结果产生偏移。考虑舰船径向速度V
步骤六一、获得MIMO雷达回波信号中的多普勒频移:
其中,V=(v
步骤六二、根据步骤六一获得的多普频移可获知舰船运动对雷达回波信号相位造成的影响如式(12)所述由此可见,雷达采样过程中微多普勒频移实质造成的是回波中的面元位置偏移ΔR:
f
式中的位置偏移量ΔR实际上可直观表现为面元的三维坐标偏移量Δx,Δy,Δz,换言之,只要获取了面元的三维坐标偏移量便可以得到舰船运动的多普勒频移,然后再基于(11)并结合现有的运动估计算法(例如Z.Hu,W.Wang and F.Dong.MIMO Radar AccurateImaging and Motion Estimation for 3-D Maneuvering Ship Target.IEEETransactions on Instrumentation and Measurement,vol.70,pp.1-12,2021.)可完成对舰船各维运动速度、角速度等的解算,进而可获取实际的面元偏转角度大小。
步骤六三、舰船在海面的偏转角度满足类正弦时变运动特征,对于常见的驱逐舰与航空母舰两类较大船型,散射面元在采样时间内的多普勒频谱如图4(a)-图4(b)所示,证明真实海面场景中舰船目标运动造成的多普勒频移不可忽略;
所述舰船在海面的偏转角度如下:
θ
其中,roll是横摇模式,pitch是纵摇模式,yaw是艏摇模式,i是转动模式,A
步骤六四、通过设定参考坐标空间,基于少量快拍下获取的回波信号分析舰船运动的多普勒特征,结合舰船目标运动速度、角速度等参数,可得到散射位置的三维坐标偏移,获取目标面元中心与雷达平台中心、阵元中心的矢量变化特征,可为补偿目标面元的动态RCS变化提供参考。为了明确散射面元中心偏移情况,需借助舰船Roll、Pitch、Yaw运动的X、Y、Z三维坐标系旋转矩阵,即利用步骤六三获得的偏转角度获取舰船Roll、Pitch、Yaw运动的X、Y、Z三维坐标系旋转矩阵Ω
其中,r为roll的缩写,p为pitch的缩写,y为yaw的缩写;
步骤六五、根据步骤六四获得的Ω
步骤六六、根据步骤六五获得的坐标偏移量消除散射面元电磁散射特征畸变:
首先,结合(13)~(15)可得到舰船在每个采样时刻的偏转角度;
然后,获取每个散射面元散射中心的三维位置偏转矢量Δr
若Δr
最后,利用公式(6)根据偏转角度和偏转方向对每个散射面元电磁散射特征进行补偿,消除散射面元电磁散射特征畸变。
实施例:
本发明的效果可通过以下仿真验证说明,本节中将依次从造成雷达图像闪烁问题的LoS视角改变、雷达多通道径向观测差异、一次反射波伪影失真、舰船自身不规则运动等方面验证所提补偿方案的有效性,执行流程如表3所示。
表3
首先,实验部分所用的MIMO雷达系统参数如表1所示,图5(a)、(b)和图6(a)、(b)中描述的是MIMO雷达平台从近俯视、近侧视状态下对舰船目标的实际成像结果,成像场景中所用的舰船模型为前文构造的等比例某型驱逐舰,散射面元大小与划分的网格大小相同。由图中可看出,相比于真实的舰船电磁散射图像,雷达LoS视角发生改变后,对舰船目标的成像结果中出现较为严重的电磁散射特性失真与遮挡问题,其原因主要在于未补偿雷达视角导致的散射面元可见性变化、散射面元间的遮挡问题。相比之下,在图5(c)、(d)和图6(c)、(d)中,呈现了依据本发明中的方法对上述问题的修正结果。通过对比可以得出,从雷达系统方面考虑,基于本文的校正策略,依据在该视角下每个散射面元对入射波的可见性分析及散射面元间的遮挡判断情况,可实现对图像中失真散射面元RCS闪烁偏差的主动补偿,可以有效消除图像中的偏差与遮挡现象,使得雷达成像结果能展示更为真实的目标形状、尺寸等特征。
图7中描述了不同阵元间距下多通道间的观测矢量差异带来的散射面元RCS损失,正如图7(a)所示,随着阵元间距的扩大、阵元数量的增加,不同阵元虚拟通道间的观测矢量差异造成的散射面元电磁散射特征损失增大。相比之下,图7(b)中展示了依据式(5)、(6)对该部分RCS损失的校正结果,考虑到回波中的噪声影响,在本文雷达成像与信号处理过程中,回波强度归一化后设定的目标检测阈值为0.25,由图7(b)可见,真实存在的多通道径向差异会引起较多散射面元的电磁散射强度降低至噪声阈值之下,会恶化雷达对舰船目标的探测成像,而依据式(5)、(6)可显著补偿该部分损失,有效提升雷达探测的可靠性。
表1
图8(a)、(b)中表示的是回波中包含一次反射波在散射面元间的二次散射过程所造成的雷达成像结果,相比于图1中的标准图像,该结果中显然出现了较多伪影散射面元,与式(7)中的分析结果一致。针对该问题,在雷达信号处理过程中预先依据(8)~(10)构造了网格权值矩阵并在成像前进行了相应的滤波处理,成像补偿结果如图8(c)、(d)所示,大部分伪影散射点可以被有效消除,可改善雷达图像中的失真现象。
其次,为了验证对运动舰船目标的图像修正效果,表2中首先总结了所选用的某驱逐舰在5级海况下的运动特征,并据此分别在随机两个采样时刻6.3s与10.1s呈现了相应的雷达成像结果,如图9(a)、(b)和图10(a)、(b)所示,从图中可以看出,由于舰船目标的不规则偏转,雷达图像中出现了较为严重的闪烁现象,各散射面元的散射特征出现较大偏差,甚至部分散射面元信息丢失。对此,结合获知的舰船运动特征,基于(13)、(15)对当前的雷达成像结果进行有效补偿,获取每个散射面元的电磁散射特征偏差,并结合可见性分析与判断恢复出被遮挡的散射面元RCS特征,最终对这两个时刻的图像闪烁修正结果呈现在图9(c)、(d)和图10(c)、(d)中,显然MIMO雷达对运动舰船目标的探测成像结果可以得到有效改善。
表2
- 基于散射模型的极化合成孔径雷达图像舰船检测方法
- 基于电磁散射特征和深度网络特征的SAR图像识别方法