一种可分离式姿态控制装置
文献发布时间:2023-06-19 18:30:43
技术领域
本发明涉及飞行器工程领域,具体涉及一种用于制导动力推进战斗飞行器(简称:制导飞行器)起飞后快速转弯的可分离式姿态控制装置,广泛适用于不同发射方式的反舰巡航制导飞行器及防空制导飞行器等。
背景技术
倾斜发射制导飞行器方式主要依靠旋转发射架或发射箱进行瞄准,对于舰载制导飞行器来说,舰上存在各种设施的遮挡,存在一定射击盲区。垂直发射方式不要求定向瞄准,具有反应时间快、载弹量大、全方位作战等优点,在现代化反舰巡航制导飞行器、防空制导飞行器等领域被广泛应用。针对中低空防御、近海及海面防御或进攻,现代反舰巡航制导飞行器和防空制导飞行器的关键技术是其向目标方向全方位快速转弯,要求制导飞行器在最短时间内以最小转弯半径完成程序转弯,迅速进入射程区间,以便扩大最小射程和最大射程的区间。由于制导飞行器上升初期飞行速度小,仅靠空气舵不可能实现,为了在动压较低的上升段实现快速转弯,一般采用燃气舵、燃气发生器或脉冲小发动机等方式产生转弯力矩,使弹轴转向预定的空间方位。
例如美国某制导飞行器采用燃气舵方式,优点是结构简单,易于与气动控制面结合,可实现全姿态的稳定与控制,缺点是推力损失大,燃气舵工作环境恶劣,舵效率随装药初始温度与燃蚀程度而变化。
俄罗斯某制导飞行器,基于燃气发生器及与之连接的尾喷管和空气舵相结合,该方案将尾喷管设计成跟舵面垂直,从而有效利用从喷管喷出的喷射流产生的推力,减少能量损失,然而该方案还是存在一些缺点,由于将燃气发生器喷管集成到了空气舵上,使的舵根变厚,并且舵处于高温高压恶劣环境,综合看来增加了空气舵的重量、加工难度和成本,此外燃气发生器及其附件完成快速转向后不可分离,一直伴随制导飞行器后续飞行,导致制导飞行器主发动机点火后加速慢(相对于抛掉消极重量而言),降低了机动性能,缩短了射程。并且该方案并非完全通用化,因为这种系统需要根据制导飞行器发射方式在不同类型的制导飞行器上采取不同的配置,这无疑推高了量产成本,系统在技术阵地和载具上的使用难度也随之增加。
发明内容
本发明的目的是提供一种可分离式姿态控制装置,以在短时间内直接产生大推力作用于制导飞行器,使制导飞行器在发射后瞬间实现大机动转弯,快速进入运动学弹道。
一种可分离式姿态控制装置,包括制导飞行器15,其特征在于,在制导飞行器15前端安装有姿控装置40,其中,姿控装置40包括筒状壳体2和端盖1,端盖1密封安装在筒状壳体2上端,在筒状壳体2内安装有脉冲发动机组件、控制器11、惯性测量单元12和供电单元13;控制器11、惯性测量单元12和供电单元13都安装在筒状壳体2的内壁上;并且脉冲发动机组件、控制器11、惯性测量单元12和供电单元13之间相互连接;
筒状壳体2下面开口,筒状壳体2下端面与制导飞行器15端头连接,筒状壳体2下部内有空间,制导飞行器15端头从筒状壳体2下端面插入,使制导飞行器15端头一部分伸入在筒状壳体2内,筒状壳体2下端套在制导飞行器15上部,通过剪切螺钉或爆炸螺钉5密封安装在一起;
所述的脉冲发动机组件至少包括一对偏航控制发动机6、一对俯仰控制发动机7、4台滚转控制发动机8和两个分离控制发动机9;一对偏航控制发动机6对称布置在筒状壳体2上部内壁上,两个偏航控制发动机6的喷嘴朝向相反,都朝向筒状壳体2外面,且与制导飞行器15纵轴垂直;两个俯仰控制发动机7对称布置在筒状壳体2上部内壁上,两个俯仰控制发动机7的喷嘴朝向相反,都朝向筒状壳体2外;从制导飞行器15纵轴方向看两个偏航控制发动机6和两个俯仰控制发动机7呈十字型布置;4个滚转控制发动机8喷嘴两两朝向相反,都朝向筒状壳体2外,两两在一条直线上,且分布在筒状壳体2下部两侧的内壁上,且两条直线相互平行;分离控制发动机9的喷嘴朝向与制导飞行器15纵轴呈锐角;脉冲发动机组件的所有发动机喷嘴对应的筒状壳体2都有相应的孔,供脉冲发动机组件的各发动机喷嘴的气流射出;
在使用时,将制导飞行器15和与其相连的姿控装置40放入发射筒14内,姿控装置40在发射筒14出口处,发射筒14的上端面与姿控装置40上沿的下表面采用密封材料3密封;用剪切带4将姿控装置40与发射筒14内壁连接。
所述的端盖1既是姿控装置40的端盖又是发射筒盖。
所述的控制器11、惯性测量单元12或供电单元13傍边的筒状壳体2壁上开有多个窗口10,多个窗口10都采用小门板开合方式,用来方便地面调试、维护。
所述的惯性测量单元12,实时测量制导飞行器15的三轴姿态角速率以及加速度,并将实时测量的数据传输给控制器11进行解算。
所述的控制器11用来接收惯性测量单元12输出的制导飞行器姿态参数和给定目标位置,并按转弯姿态控制和分离的要求,对接收的数据进行实时计算和处理并形成控制指令,传输给执行机构脉冲发动机组件,控制制导飞行器完成滚转、俯仰、偏航单个或组合动作后,实现装置与制导飞行器的自主分离。
所述的控制器11与地面的数据通信采用WIFI无线方式实现。
所述的供电单元13为控制器11供电,可采用锂电池或化学电池或超级电容方式实现供电。
所述的密封材料3是双道密封圈。
所述的4台滚转控制发动机8采用多脉冲固体发动机,根据实际作战场合,进行单次或多次启动,提供多脉冲推力,实现制导飞行器15的精确调姿。
本发明的有益效果
一、本发明的姿控装置40安装在制导飞行器15前端,在制导飞行器15发射过程中能大角度改变制导飞行器15的方向,其对制导飞行器15方向改变速度是以往的姿控装置达不到的。
二、本发明姿控装置40安装了多个脉冲发动机,组成了脉冲发动机组件,所述的脉冲发动机组件至少包括一对偏航控制发动机6、一对俯仰控制发动机7、4台滚转控制发动机8和两个分离控制发动机9;本发明没有舵等常规姿控装置用于改变制导飞行器方向的必要部件。本发明只用脉冲发动机来改变制导飞行器的方向。
三、本发明安装在制导飞行器上端的姿控装置与发射筒14共用一个端盖1,这样发射筒14不需要打开,使制导飞行器发射时不受发射筒盖打的影响,比现有的制导飞行器发射更加高效。共用一个端盖1另一个优点是减轻了发射筒的重量。
四、本发明中姿控装置完成制导飞行器快速转弯后从制导飞行器头部自主可控分离,保障了发射平台的安全性,并且抛掉消极重量减小了整个制导飞行器的重量和体积,制导飞行器空中加速段助推发动机装置(或主发动机)点火后加速性能大大增强,综合提升了制导飞行器机动性能和射程,进而提高了制导飞行器打击或防御能力。
五、本发明为制导飞行器发射出筒上升段滚转-俯仰-偏航控制、以及分离控制提供一套完整思路,完全可替代燃气发生器+空气舵控制方式,有效改善空气舵恶劣工作环境,并且去掉燃气发生器及其附件后,空气舵设计复杂度降低(比如去掉舵内部流道,舵根厚度减薄等),同时避免了燃气发生器+空气舵方式推力损失大的问题;并且根据不同制导飞行器特点,选择性地安装功能模块,以实现特定功能(比如只选择安装分离用的脉冲发动机)。
六、本发明的姿控装置采用一体化独立可抛模块设计,与制导飞行器头部外置安装,极大降低制导飞行器设计接口复杂性,本发明结构简单、安装方便、适应性广。
七、本发明目的是创建一种用于制导飞行器转弯的可分离式姿态控制通用装置,使其满足大部分现代化路基、水面舰艇、水下潜艇等不同载具垂直或倾斜多种方式下发射制导飞行器的不同要求,并实现制导飞行器发射后向目标方向全方位快速转弯。
八、本发明可替代燃气发生器+空气舵传统控制方式,解决传统控制方式带来的结构复杂、空气舵工作环境恶劣、舵设计复杂度高、推力损失大、成本高等问题。
九、本发明姿控装置是基于脉冲发动机直接力控制方式,在短时间内直接产生较大推力作用于制导飞行器,使制导飞行器在发射后瞬间实现大机动转弯,快速进入运动学弹道,完成转弯后自主与制导飞行器分离,减轻制导飞行器飞行重量,从而达到提升制导飞行器机动作战(快速响应)效能和生存能力的目的。
附图说明
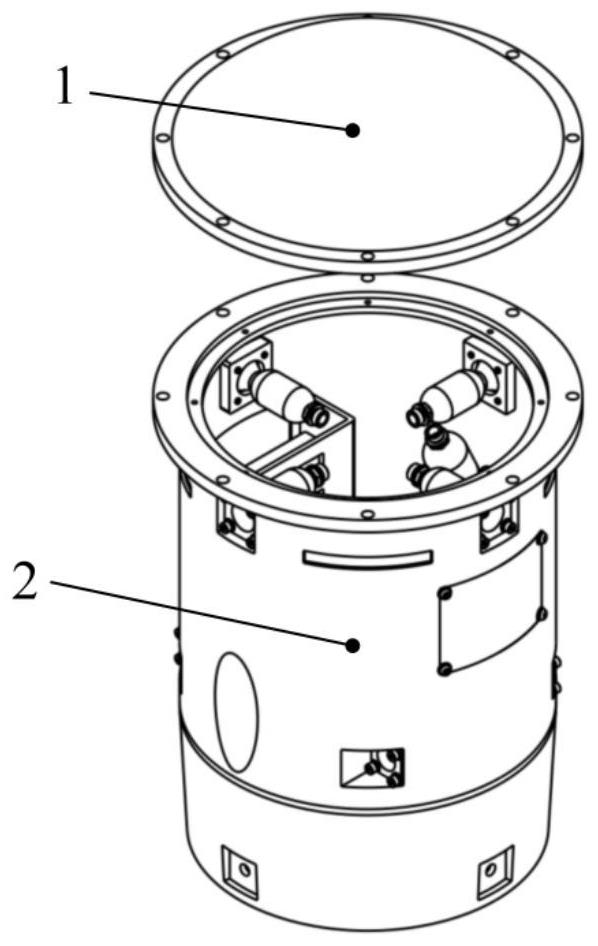
图1、为本发明的姿控装置40结构示意图;
图2、为本发明发射过程中姿控装置40与制导飞行器15位置关系示意图;其中
(a)为本发明姿控装置40与制导飞行器15连接在一起,并安装在发射筒里的状态示意图;
(b)为本发明姿控装置40与制导飞行器15连接在一起,并从发射筒里发射出筒时的状态示意图;
(c)为本发明姿控装置40与制导飞行器15在发射出筒后,姿控装置与制导飞行器分离开的状态示意图;
图3、本发明的脉冲发动机组件在姿控装置40内分布结构示意图;其中,
(a)为图3之(b)的A-A剖视图;
(b)为本发明的脉冲发动机组件在姿控装置40内分布结构之剖视图;
(c)为图3之(b)的B-B剖视图;
图4、本发明的控制器11、惯性测量单元12和供电单元13在姿筒状壳体2的内壁上连接关系示意图;
图5、本发明姿控装置结构原理图。
其中,1为端盖,2为筒状壳体,3为密封材料,4为剪切带,5为爆炸螺钉,6为偏航控制发动机,7为俯仰控制发动机,8为滚转控制发动机,9为分离控制发动机,10为窗口,11为控制器,12为惯性测量单元,13为供电单元,14为发射筒,15为制导飞行器,40为姿控装置。
具体实施方式
一种可分离式姿态控制装置,包括制导飞行器15,其特征在于,在制导飞行器15前端安装有姿控装置40,其中,姿控装置40包括筒状壳体2和端盖1,端盖1密封安装在筒状壳体2上端,在筒状壳体2内安装有脉冲发动机组件、控制器11、惯性测量单元12和供电单元13;控制器11、惯性测量单元12和供电单元13都安装在筒状壳体2的内壁上;并且脉冲发动机组件、控制器11、惯性测量单元12和供电单元13之间相互连接;
筒状壳体2下面开口,筒状壳体2下端面与制导飞行器15端头连接,筒状壳体2下部内有空间,制导飞行器15端头从筒状壳体2下端面插入,使制导飞行器15端头一部分伸入在筒状壳体2内,筒状壳体2下端套在制导飞行器15上部,通过剪切螺钉或爆炸螺钉5密封安装在一起;
所述的脉冲发动机组件至少包括一对偏航控制发动机6、一对俯仰控制发动机7、4台滚转控制发动机8和两个分离控制发动机9;一对偏航控制发动机6对称布置在筒状壳体2上部内壁上,两个偏航控制发动机6的喷嘴朝向相反,都朝向筒状壳体2外面,且与制导飞行器15纵轴垂直;两个俯仰控制发动机7对称布置在筒状壳体2上部内壁上,两个俯仰控制发动机7的喷嘴朝向相反,都朝向筒状壳体2外;从制导飞行器15纵轴方向看两个偏航控制发动机6和两个俯仰控制发动机7呈十字型布置;4个滚转控制发动机8喷嘴两两朝向相反,都朝向筒状壳体2外,两两在一条直线上,且分布在筒状壳体2下部两侧的内壁上,且两条直线相互平行;分离控制发动机9的喷嘴朝向与制导飞行器15纵轴呈锐角;脉冲发动机组件的所有发动机喷嘴对应的筒状壳体2都有相应的孔,供脉冲发动机组件的各发动机喷嘴的气流射出;
在使用时,将制导飞行器15和与其相连的姿控装置40放入发射筒14内,姿控装置40在发射筒14出口处,发射筒14的上端面与姿控装置40上沿的下表面采用密封材料3密封;用剪切带4将姿控装置40与发射筒14内壁连接。
所述的端盖1既是姿控装置40的端盖又是发射筒盖。
所述的控制器11、惯性测量单元12或供电单元13傍边的筒状壳体2壁上开有多个窗口10,多个窗口10都采用小门板开合方式,用来方便地面调试、维护。
所述的惯性测量单元12,实时测量制导飞行器15的三轴姿态角速率以及加速度,并将实时测量的数据传输给控制器11进行解算。
所述的控制器11用来接收惯性测量单元12输出的制导飞行器姿态参数和给定目标位置,并按转弯姿态控制和分离的要求,对接收的数据进行实时计算和处理并形成控制指令,传输给执行机构脉冲发动机组件,控制制导飞行器完成滚转、俯仰、偏航单个或组合动作后,实现装置与制导飞行器的自主分离。
所述的控制器11与地面的数据通信采用WIFI无线方式实现。
所述的供电单元13为控制器11供电,可采用锂电池或化学电池或超级电容方式实现供电。
所述的密封材料3是双道密封圈。
所述的4台滚转控制发动机8采用多脉冲固体发动机,根据实际作战场合,进行单次或多次启动,提供多脉冲推力,实现制导飞行器15的精确调姿。
实施例:
本发明的姿控装置是基于脉冲发动机直接力控制方式,在短时间内直接产生较大推力作用于制导飞行器,使制导飞行器在发射后瞬间实现大机动转弯,快速进入运动学弹道,完成转弯后自主与制导飞行器分离,减轻制导飞行器飞行重量,从而达到提升制导飞行器机动作战(快速响应)效能和生存能力的目的。
姿控装置主要由一组脉冲发动机组件、控制器、惯性测量单元、供电单元,端盖及筒状壳体等组成,如图1所示,结构主体由一个端盖1和筒状壳体2组成,筒状壳体2可采用一体化加工或分体加工焊接成型方式,端盖1可采用一体化加工成型,各部组件安装在筒状壳体2上。装置一体化独立模块设计,通过剪切螺钉或爆炸螺钉5安装在制导飞行器15前部,可以与制导飞行器自主分离。装置通过密封材料3与发射筒14之间进行密封,通过剪切带4与发射筒14之间进行连接,如图2所示。
所述脉冲发动机组件主要由发动机、点火器组成,作为执行机构在功能上是独立的,一种发动机的布局形式如图3所示(发动机布局不限于这一种形式)。负责偏航控制的一对发动机6、俯仰控制的一对发动机7、滚转控制的4台发动机8、以及分离控制的一对发动机9。发动机6对称布置,喷嘴朝向相反且与制导飞行器8纵轴垂直;发动机7布置方法及喷嘴朝向类似发动机6,从制导飞行器纵轴方向看发动机6和7呈十字型布置;发动机8的喷嘴朝向与壳体2相切,同时2台发动机的喷嘴与另2台发动机的喷嘴朝向相反;发动机9的喷嘴朝向与制导飞行器8纵轴呈锐角。其中负责滚转控制的4台发动机8可采用双脉冲固体发动机,用于二次精确调姿。所有脉冲固体发动机均通过喷口位置的法兰安装在筒状壳体2壁上,对应筒壁处开孔,以使气流喷出。
所述控制器11用来接收惯性测量单元12输出的制导飞行器姿态参数和给定的目标位置,按转弯姿态控制、分离控制等要求,对接收的数据进行实时计算和处理并形成控制指令,传输给执行机构-脉冲发动机,控制制导飞行器完成滚转-俯仰-偏航单个或组合动作后实现装置与制导飞行器的自主分离。控制器11主要包括硬件和软件,硬件为软件的运行控制以及接口信息的传送控制提供物理平台和基础,软件实现转弯程序控制、分离程序控制等。控制器11与地面的数据通信采用WIFI无线方式实现。
所述惯性测量单元12,用来实时测量制导飞行器三轴姿态角(或角速率)以及加速度,将参数传输给控制器11解算。
所述供电单元13为控制器11供电,可采用锂电池或化学电池或超级电容等方式实现供电。
所述控制器11、惯性测量单元12和供电单元13可安装在筒状壳体2的侧壁上,并在壳体上设有窗口,采用小门板10开合方式,用来防护窗口以及方便地面调试、维护等,如图4所示。对于小型制导飞行器来说,筒状壳体2的安装空间可能比较小,这种情况下可将上述元件安装在筒状壳体2的上部,通过拆卸端盖1进行地面调试及维护。惯性测量单元12和供电单元13根据制导飞行器体积大小也可以集成到控制器11中。
所述端盖1与发射筒盖共形设计,既是姿控装置端盖又是发射筒盖,减少了发射筒的重量。
所述壳体2上还安装有密封材料3,用于从运输发射筒前端密封制导飞行器与发射筒之间的环形间隙。密封材料可采用双道密封圈形式。
所有部组件、单机及结构壳体集成为一个一体化独立舱段模块,可方便与不同制导飞行器通过剪切螺钉或爆炸螺钉外置安装,接口简单、安装方便、适应性广。
姿控装置系统内部连接关系如图5所示。控制器作为中央处理器,分别与供电单元、惯性测量单元、点火器连接。供电单元为控制器供电,惯性测量单元将实时测量的制导飞行器姿态参数传输给控制器,控制器根据给定的目标位置参数和实时采集的制导飞行器姿态参数进行解算比对,形成控制指令传输给发动机点火器,启动发动机工作,控制制导飞行器完成程序转弯。
使用方法:
制导飞行器出水或出筒被传感器记录后,启动姿控装置进行滚转、俯仰或偏航等动作,实现向目标的快速转弯。比如对制导飞行器进行先滚转后俯仰转弯、最后分离控制模式,控制器11根据预估的弹道核对制导飞行器的实时姿态,发出滚转指令启动一对滚转发动机8,在发动机推力作用下围绕制导飞行器纵轴产生正力矩,制导飞行器在滚转通道中的角速度提高,开始加速旋转,惯性测量单元12将实时测量的制导飞行器姿态参数传输给控制器11,控制器11根据给定的目标参数和惯性测量单元测量的制导飞行器姿态参数计算后续指令启动时间,制导飞行器基准快要对准目标射面时,给出指令启动另一对滚转发动机8反方向喷射产生负力矩,抑制滚转角速度,使制导飞行器快速稳定,然后启动一台俯仰发动机7,在发动机推力作用下产生“低头”力矩,制导飞行器在俯仰通道中的角速度提高,控制器实时解算,给出指令启动另一台俯仰发动机7产生“止动”力矩,在制导飞行器相对于地平线转入所需姿态时刻平息俯仰角速度。同样地,制导飞行器在偏航通道也采用类似的控制方法。转弯结束后,控制器11发送指令启动分离发动机9,使姿控装置沿制导飞行器飞行方向输出冲量,姿控装置从制导飞行器前部分离,沿抛物线弹道落在发射平台前方,紧接着制导飞行器启动自身发动机,开始急剧加速,当飞行速度足够大时,制导飞行器姿态控制由空气舵完成。
上文所述控制器11和惯性测量单元12可根据制导飞行器特定需求选装,比如控制和测量功能可以由制导飞行器本身的控制系统和惯导实现,脉冲发动机也可以选择性地安装,实现特定功能,比如水面小水平角(10-30度)发射制导飞行器,制导飞行器不需要姿控装置进行大方位角转弯,只选择安装分离用的脉冲发动机,进一步降低成本。
通过采用本发明装置不同动作顺序和上文推荐的使用方法启动程序,赋予了制导飞行器可以从不同载具垂直或倾斜发射、并且发射后快速转弯的能力。
综上,按照本发明可以指导研制完全通用化的制导飞行器,能够满足现代常规海基、路基等武器的不同要求,广泛适应各型载具,能够充分体现通用化武器操作简单、使用成本低的优点。
本发明解决的技术问题:
1.本发明目的是创建一种用于制导飞行器转弯的可分离式姿态控制通用装置,使其满足大部分现代化路基、水面舰艇、水下潜艇等不同载具垂直或倾斜多种方式下发射制导飞行器的不同要求,并实现制导飞行器发射后向目标方向全方位快速转弯;
2.本发明可替代燃气发生器+空气舵传统控制方式,解决传统控制方式带来的结构复杂、空气舵工作环境恶劣、舵设计复杂度高、推力损失大、成本高等问题。
3.本发明只改变系统中组成部分的工作程序和操作方法,就可实现不同类型制导飞行器的特定功能(效果),解决了量产成本高,系统在技术阵地和载具上的使用难度大等问题;
4.解决装置使用完后与制导飞行器安全可靠的分离问题,减小制导飞行器重量和体积,提升制导飞行器机动性能和射程;
5.本发明装置采用一体化独立可抛模块设计,与制导飞行器外置安装,解决了制导飞行器设计接口复杂、安装效率低、适应性低等问题;
本发明的关键点:
1.本发明装置的工作顺序、点火时序等原理方法创新。可以指导研制完全通用化的制导飞行器,能够满足大部分现代化路基、水面舰艇、水下潜艇等不同载具垂直或倾斜多种方式下发射制导飞行器的不同要求,并实现制导飞行器快速转弯;
2.本发明装置采用一体化独立可抛模块设计,与制导飞行器外置安装,极大降低制导飞行器设计接口复杂性,结构简单、安装方便、适应性广;
3.本发明可根据不同的发射方式及不同类型的制导飞行器,只选择性安装功能单元、改变组成部分的工作程序和操作方法,就可实现不同类型制导飞行器的特定功能(效果),大大降低了量产成本,系统在技术阵地和载具上的使用难度也随之降低;
4.本发明具备自主可控分离能力,使命完成后与制导飞行器分离,保障发射平台的安全性前提下减小了整个制导飞行器的重量和体积,制导飞行器空中加速段助推发动机(或主发动机)点火后加速性能大大增强,综合提升了制导飞行器机动性能和射程,进而提高了制导飞行器打击和防御能力;
5.本发明为制导飞行器发射出筒上升段滚转-俯仰-偏航控制、以及分离控制提供一套完整思路,完全可替代燃气发生器+空气舵控制方式,有效改善空气舵恶劣工作环境,并且去掉燃气发生器及其附件后,空气舵设计复杂度降低(比如去掉舵内部流道,舵根厚度减薄等),同时避免了燃气发生器+空气舵方式推力损失大的问题;并且根据不同制导飞行器特点,选择性地安装功能模块,以实现特定功能(比如只选择安装分离用的脉冲发动机)。
本发明技术方案带来的益处:
1.本发明装置,可以指导研制完全通用化的制导飞行器,能够满足大部分现代化路基、水面舰艇、水下潜艇等不同载具垂直或倾斜多种方式下发射制导飞行器的不同要求,并实现制导飞行器快速转弯。
2.本发明装置采用一体化独立可抛模块设计,与制导飞行器头部外置安装,极大降低制导飞行器设计接口复杂性,结构简单、安装方便、适应性广。
3.针对不同的发射方式及不同类型的制导飞行器,本发明装置,选装或只改变系统中组成部分的工作程序和操作方法,就可实现不同类型制导飞行器的特定功能(效果),大大降低了量产成本,系统在技术阵地和载具上的使用难度也随之降低。
4.本发明中姿控装置完成制导飞行器快速转弯后从制导飞行器头部自主可控分离,保障了发射平台的安全性,并且抛掉消极重量减小了整个制导飞行器的重量和体积,制导飞行器空中加速段助推发动机装置(或主发动机)点火后加速性能大大增强,综合提升了制导飞行器机动性能和射程,进而提高了制导飞行器打击或防御能力。
5.本发明为制导飞行器发射出筒上升段滚转-俯仰-偏航控制、以及分离控制提供一套完整思路,完全可替代燃气发生器+空气舵控制方式,有效改善空气舵恶劣工作环境,并且去掉燃气发生器及其附件后,空气舵设计复杂度降低(比如去掉舵内部流道,舵根厚度减薄等),同时避免了燃气发生器+空气舵方式推力损失大的问题;并且根据不同制导飞行器特点,选择性地安装功能模块,以实现特定功能(比如只选择安装分离用的脉冲发动机)。