信息取得系统及信息取得方法
文献发布时间:2023-06-19 18:32:25
技术领域
本发明涉及用于取得与作业机械相关的信息的信息取得系统及信息取得方法。
背景技术
信息化施工是指,在建筑土木工程中的施工中,通过信息通信技术(ICT)的活用,实现高效率且高精度的施工。作为信息化施工技术的一例,提出了如下机器引导技术:使用全站仪(Total Station)或GNSS(Global Navigation Satellite Systems:全球导航卫星系统)等位置计测装置取得作业机械的位置,将和施工部位的设计数据与现状地形数据的差值相关的信息提供给作业机械的驾驶座监视器。
作为作业机械之一,有液压挖掘机。液压挖掘机可以具备由动臂、斗杆及铲斗构成的工作装置。动臂、斗杆及铲斗可以依次由销支承为能够转动。关于使用机器引导技术的施工,在非专利文献1中记载了测定ICT液压挖掘机的斗杆尺寸等各可动部的销间的尺寸及铲斗尺寸的内容。
在先技术文献
非专利文献
非专利文献1:日本国土交通省近畿地方治理局近畿技术事务所“机器引导技术(反铲篇)的指南”,2014年3月,p.29
发明内容
发明所要解决的课题
为了根据使用全站仪等分别测定作业机械中的工作装置的各销的位置而得的结果来算出销间的尺寸,需要在各销的位置安装测量目标。该测量目标的安装作业繁杂,而且由于通过手动作业将测量目标安装于各销,因此无法保证安装精度。
在本发明中,提出一种能够通过简便的作业更准确地取得与用于信息化施工的作业机械相关的信息的信息取得系统及信息取得方法。
用于解决课题的方案
根据本发明,提出一种信息取得系统。信息取得系统具备作业机械、目标部、位置计测部和信息取得部。作业机械具有基座部和相对于基座部相对移动的可动部。目标部安装于可动部。位置计测部连续地计测随着可动部相对于基座部的相对移动而移动的目标部的位置。信息取得部根据从计测得到的目标部的轨迹,取得与作业机械相关的三维信息。
根据本发明,提出一种取得与作业机械相关的三维信息的信息取得方法。作业机械具有基座部和能够相对于基座部相对移动的可动部。在作业机械的可动部安装有目标部。信息取得方法包括以下的处理。第一处理是是使可动部相对于基座部相对移动。第二处理是连续地计测随着可动部相对于基座部的相对移动而移动的目标部的位置。第三处理是根据从计测得到的目标部的轨迹,取得与作业机械相关的三维信息。
发明效果
根据本发明的信息取得系统及信息取得方法,能够通过简便的作业更准确地取得与作业机械相关的信息。
附图说明
图1是液压挖掘机的外观图。
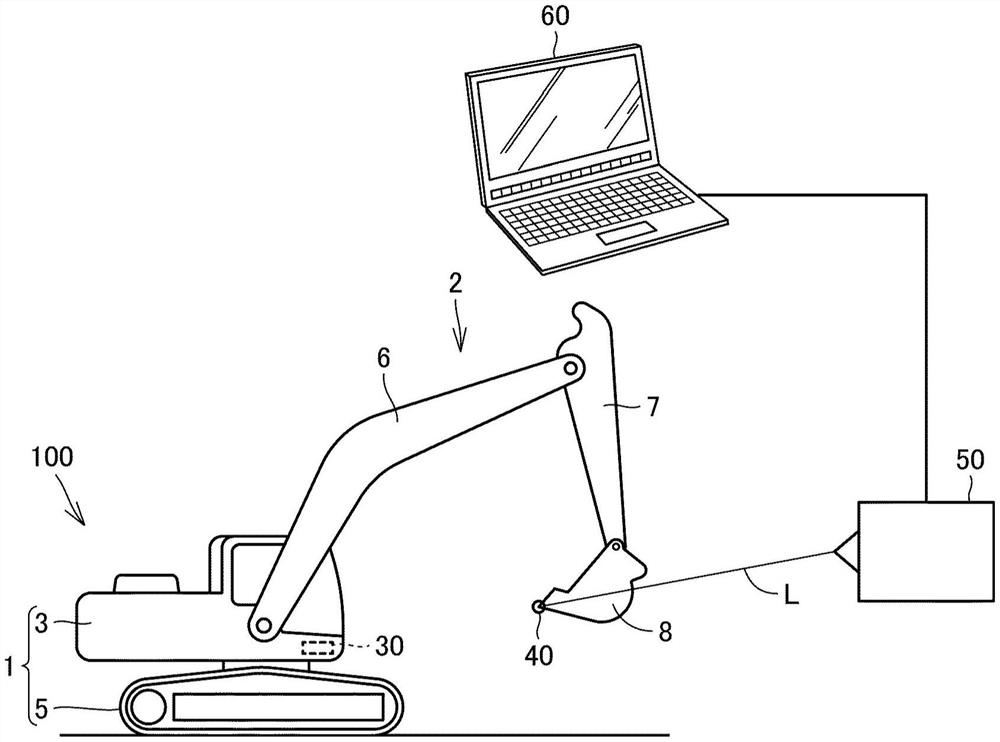
图2是示出基于实施方式的信息取得系统的概要结构的示意图。
图3是示出信息取得系统的功能结构的框图。
图4是示出取得与液压挖掘机相关的三维信息的处理的流程的流程图。
图5是示出回转体的回转的平面示意图。
图6是示出回转平面的倾斜角及惯性计测装置的安装误差的侧面示意图。
图7是示出导出工作装置动作平面时的动臂的动作的侧面示意图。
图8是示出导出铲斗尺寸时的铲斗的动作的侧面示意图。
图9是示出导出斗杆尺寸时的斗杆的动作的侧面示意图。
图10是示出导出动臂尺寸时的动臂的动作的侧面示意图。
具体实施方式
以下,基于附图对实施方式进行说明。在以下的说明中,对相同部件标注相同的附图标记。它们的名称及功能也相同。因此,不再重复对它们的详细说明。
图1是作为通过基于实施方式的信息取得系统及信息取得方法来取得信息的作业机械的一例的液压挖掘机100的外观图。在实施方式中,作为作业机械,列举液压挖掘机100为例进行说明。
如图1所示,液压挖掘机100具有主体1和利用液压进行工作的工作装置2。主体1具有回转体3和行驶体5。行驶体5具有一对履带5Cr和行驶马达5M。行驶马达5M作为行驶体5的驱动源而设置。行驶马达5M是利用液压进行工作的液压马达。
在液压挖掘机100动作时,行驶体5、更具体而言履带5Cr与地面接触。行驶体5能够通过履带5Cr的旋转而在地面上行驶。需要说明的是,行驶体5也可以具有车轮(轮胎)来代替履带5Cr。
回转体3配置在行驶体5上,且由行驶体5支承。回转体3能够相对于行驶体5相对移动。回转体3以能够将回转轴RX为中心相对于行驶体5回转的方式搭载于行驶体5。回转体3经由回转盘(circle)部安装在行驶体5上。回转盘部配置于俯视时的主体1的大致中央部。回转盘部具有圆环状的大致形状,在内周面具有回转用的内齿。与该内齿啮合的小齿轮装配于未图示的回转马达。通过被从回转马达传递驱动力而回转盘部旋转,从而回转体3能够相对于行驶体5相对旋转。
回转体3具有驾驶室4。液压挖掘机100的乘员(操作员)搭乘于该驾驶室4,对液压挖掘机100进行操纵。在驾驶室4中设置有供操作员就座的驾驶座4S。操作员能够在驾驶室4内操作液压挖掘机100。操作员能够在驾驶室4内进行工作装置2的操作,能够进行回转体3相对于行驶体5的回转操作,并且能够进行基于行驶体5的液压挖掘机100的行驶操作。在本发明中,液压挖掘机100被从驾驶室4内操作,但也可以从远离液压挖掘机100的场所通过无线进行远程操作。
在实施方式中,以就座于驾驶室4内的驾驶座4S的操作员为基准,对液压挖掘机100的回转体3中的各部分的位置关系进行说明。前后方向是指就座于驾驶座4S的操作员的前后方向。与就座于驾驶座4S的操作员正对的方向为前方向,就座于驾驶座4S的操作员的背后方向为后方向。左右方向是指就座于驾驶座4S的操作员的左右方向。就座于驾驶座4S的操作员正对正面时的右侧、左侧分别为右方向、左方向。上下方向是指就座于驾驶座4S的操作员的上下方向。就座于驾驶座4S的操作员的脚侧为下侧,头上侧为上侧。
在前后方向上,工作装置2从回转体3突出的一侧为前方向,与前方向相反的方向为后方向。在观察前方向时,左右方向的右侧、左侧分别是右方向、左方向。在上下方向上,地面所在的一侧为下侧,天空所在的一侧为上侧。
回转体3具有收容发动机的发动机室9和设置于回转体3的后部的配重。在发动机室9配置有产生驱动力的发动机、接受发动机产生的驱动力而向液压致动器供给工作油的液压泵等。
在回转体3上,在发动机室9的前方设置有扶手19。在扶手19上设置有天线21。天线21例如为GNSS用的天线。天线21具有以在左右方向上相互分离的方式设置于回转体3的第一天线21A及第二天线21B。
工作装置2搭载于回转体3,由回转体3支承。工作装置2具有动臂6、斗杆7以及铲斗8。动臂6以能够旋转的方式与回转体3连结。斗杆7以能够旋转的方式与动臂6连结。铲斗8以能够旋转的方式与斗杆7连结。铲斗8具有多个斗齿。将铲斗8的前端部称为铲尖8a。
需要说明的是,铲斗8也可以不具有斗齿。铲斗8的前端部也可以由直线形状的钢板形成。
动臂6的基端部经由动臂脚销13(以下,称为动臂销)与回转体3连结。斗杆7的基端部经由斗杆连结销14(以下,称为斗杆销)与动臂6的前端部连结。铲斗8经由铲斗连结销15(以下,称为铲斗销)与斗杆7的前端部连结。动臂销13、斗杆销14及铲斗销15沿大致左右方向延伸。
动臂6能够相对于回转体3相对移动。动臂6能够以动臂销13为中心相对于回转体3相对旋转。斗杆7能够相对于动臂6相对移动。斗杆7能够以斗杆销14为中心相对于动臂6相对旋转。铲斗8能够相对于斗杆7相对移动。铲斗8能够以铲斗销15为中心相对于斗杆7相对旋转。
斗杆7及铲斗8在铲斗8相对于斗杆7不相对旋转的状态下能够一体地相对于动臂6相对移动,具体而言能够相对旋转。动臂6、斗杆7及铲斗8在铲斗8相对于斗杆7不相对旋转且斗杆7相对于动臂6不相对旋转的状态下,能够一体地相对于回转体3相对移动,具体而言能够相对旋转。工作装置2及回转体3在工作装置2相对于回转体3不相对旋转的状态下,能够一体地相对于行驶体5相对移动,具体而言能够相对旋转。
工作装置2具有动臂缸10、斗杆缸11以及铲斗缸12。动臂缸10对动臂6进行驱动。斗杆缸11对斗杆7进行驱动。铲斗缸12对铲斗8进行驱动。动臂缸10、斗杆缸11及铲斗缸12分别是由工作油驱动的液压缸。
铲斗缸12安装于斗杆7。通过铲斗缸12伸缩,铲斗8相对于斗杆7旋转。工作装置2具有铲斗连杆。铲斗连杆将铲斗缸12与铲斗8连结。
在液压挖掘机100上搭载有控制器26。控制器26对液压挖掘机100的动作进行控制。
图2是示出基于实施方式的信息取得系统的概要结构的示意图。在液压挖掘机100上安装有目标部40。目标部40安装于液压挖掘机100的一个部位。在图2所示的例子中,在铲斗8的铲尖8a安装有目标部40。
信息取得系统具备位置计测部50。位置计测部50计测目标部40的位置。位置计测部50例如是激光跟踪器,在该情况下,目标部40为目标反射器。
激光跟踪器朝向目标反射器照射激光L。当被照射激光L时,目标反射器在与被照射的方向相同的方向上反射光。该反射光返回到激光跟踪器。激光跟踪器能够根据激光L从目标反射器返回的时间,求出激光跟踪器与目标反射器的距离。另外,激光跟踪器自身掌握照射激光L的方向。激光跟踪器能够根据照射激光L的方向和到目标反射器的距离,求出目标反射器的三维位置。
激光跟踪器能够以高采样率连续地计测移动的目标反射器的三维位置。激光跟踪器能够自动地跟踪目标反射器的移动,连续地取得三维位置。由此,激光跟踪器能够取得移动中的目标反射器的轨迹。以高采样率连续地计测出的目标反射器的三维位置能够作为目标反射器的轨迹进行处理。
位置计测部50只要能够取得目标部40的三维位置即可,不限于激光跟踪器。例如,位置计测部50也可以是具备目标部40的跟踪功能的全站仪。另外,例如,位置计测部50也可以是以立体相机为代表的拍摄装置,在该情况下,目标部40也可以是用于使拍摄图像中的目标部40的位置的识别变得容易的标记。另外,例如,位置计测部50也可以通过任意的角度计与测距仪的组合来实现。
信息取得系统具备信息取得部60。信息取得部60例如设置于液压挖掘机100的外部。信息取得部60能够经由无线或有线的通信单元与位置计测部50进行通信。信息取得部60是构成为包括CPU(Central Processing Unit)、非易失性存储器、计时器等的计算机。
信息取得部60从移动的目标部40的轨迹取得与液压挖掘机100相关的三维信息。由信息取得部60取得的与液压挖掘机100相关的三维信息例如包括液压挖掘机100的工作装置2的尺寸、相对于回转体3相对旋转的工作装置2的轨迹所描绘的平面、相对于行驶体5相对旋转的回转体3的轨迹所描绘的平面等。与液压挖掘机100相关的三维信息可以是三维空间中的液压挖掘机100的规定部位的位置坐标信息、两个规定部位间的距离信息、由液压挖掘机100的形状、姿态等规定的平面的信息等。三维空间的坐标系可以是ITRF(International Terrestrial Reference Frame)坐标系。
图3是示出信息取得系统的功能结构的框图。液压挖掘机100除了具备参照图1说明的回转体3、动臂6、斗杆7、铲斗8及控制器26之外,还具备惯性计测装置(IMU)30。惯性计测装置30检测液压挖掘机100的倾斜度。惯性计测装置30检测液压挖掘机100相对于前后方向、左右方向及上下方向的倾斜角度。惯性计测装置30相当于检测液压挖掘机100所处的地面的倾斜角度的实施方式的倾斜传感器。如图2所示,惯性计测装置30安装于回转体3的前部左右方向中央的位置。
目标部40安装于液压挖掘机100中的回转体3或工作装置2(动臂6、斗杆7、铲斗8)中的任一个部位。位置计测部50计测安装于回转体3、动臂6、斗杆7或铲斗8的目标部40的三维位置。
信息取得部60具备输入部61、回转平面导出部62、车载IMU对准误差运算部63、工作装置动作平面导出部64、旋转半径运算部65、矢量处理部66以及输出部67。
图4是示出取得与液压挖掘机100相关的三维信息的处理的流程的流程图。以下详细说明图3所示的信息取得部60的各功能块的功能和由各功能块实现的取得与液压挖掘机100相关的三维信息的处理。通过以下的处理取得的与液压挖掘机100相关的三维信息是在实施信息化施工时、为了准确地导出铲斗8的铲尖8a的位置而提高工作装置2的位置的运算的精度所需的参数。
首先,在步骤S1~S6的处理中,求出针对搭载于液压挖掘机100的回转体3的惯性计测装置30的安装误差的校正值,能够准确地识别回转体3相对于水平面的倾斜度。在步骤S1中,测量回转体3回转时的车身的任意位置的轨迹TR。
图5是示出回转体3的回转的平面示意图。如上所述,回转体3受到回转马达产生的驱动力而相对于行驶体5回转。需要说明的是,液压挖掘机100能够进行一边使动臂6上升一边使回转体3回转的提升回转、一边使动臂6下降一边使回转体3回转的下降回转,但在图5所示的回转中,工作装置2相对于回转体3的相对位置保持恒定。将作为静止部位的行驶体5作为基座部,将相对于基座部相对地进行旋转动作的回转体3及工作装置2作为可动部。
目标部40安装于工作装置2或回转体3的任意位置。目标部40例如安装于动臂6的前端、典型的是斗杆销14的位置。在该状态下,回转体3相对于行驶体5回转。将行驶体5作为静止的基座部,将回转体3作为可动部使其回转。典型的是,回转体3相对于行驶体5旋转180°。位置计测部50计测随着工作装置2及回转体3相对于行驶体5的相对旋转而移动的目标部40的位置。位置计测部50连续地取得目标部40的三维位置,并将取得的目标部40的三维位置信息(位置信号)输出至信息取得部60的输入部61。
回转平面导出部62从连续地取得的目标部40的三维位置取得目标部40的轨迹,并将其作为轨迹TR。
在步骤S2中,回转平面导出部62根据在步骤S1中得到的轨迹TR,通过最小二乘法导出回转平面PR的方程式。使平面倾斜,求出与目标部40的轨迹TR上的点组的误差最小的平面,将求出的平面作为回转平面PR。
关于从连续地取得的目标部40的三维位置通过最小二乘法导出平面的方程式的方法,例如在下述的Web网站中进行了解说。
“SOL Corporation邮件杂志‘知道了干涉计测定技术!”2009年2月10日号VOL.001”,[令和2年10月27日检索],互联网
在步骤S3中,车载IMU对准误差运算部63根据在步骤S2中得到的回转平面PR的方程式,运算回转平面PR相对于水平面的倾斜角AID。
图6是示出回转平面PR相对于水平面H的倾斜角AID及惯性计测装置30的安装误差β的侧面示意图。目标部40安装于动臂6的前端的斗杆销14的位置。惯性计测装置30以内置的传感器的坐标系的原点OP为基准输出液压挖掘机100的主体1的姿态信息(角度信号)。车载IMU对准误差运算部63根据回转体3相对于行驶体5回转时的目标部40的轨迹TR,通过最小二乘法导出回转平面PR。车载IMU对准误差运算部63运算回转平面PR相对于水平面H的倾斜角AID。
在步骤S4中,搭载于液压挖掘机100的惯性计测装置30的计测结果信息(IMU输出信号)被输入到信息取得部60的输入部61。车载IMU对准误差运算部63根据惯性计测装置30的输出,取得车身姿态、即液压挖掘机100的主体1相对于水平面H的倾斜角AI。
在步骤S5中,车载IMU对准误差运算部63将在步骤S3中运算出的回转平面PR的倾斜角AID与在步骤S4中取得的液压挖掘机100的主体1的倾斜角AI进行比较。车载IMU对准误差运算部63判断倾斜角AID与倾斜角AI是否不相等、即判断是否存在倾斜角AI相对于倾斜角AID的误差。
若判断为倾斜角AID与倾斜角AI不相等(在步骤S5中为是),则进入步骤S6,车载IMU对准误差运算部63根据倾斜角AID与倾斜角AI的差值,校正惯性计测装置30的对准误差(安装误差)。如图6所示,车载IMU对准误差运算部63运算IMU安装误差β,作为回转平面PR的倾斜角AID与惯性计测装置30识别出的角度即倾斜角AI的差值。更详细而言,车载IMU对准误差运算部63如以下那样算出IMU安装误差β。
在步骤S2中,在将高度设为z、将面的纵横方向设为x、y时,如z=a+bx+cy那样求出回转平面PR的方程式。在该情况下,表示回转平面PR的倾斜度的回转平面PR的法线矢量为(b,c,1)。另外,若将由惯性计测装置30计测的车身的倾斜角AI的角度矢量设为(A,B,C),则回转平面PR的倾斜角AID与车身的倾斜角AI的差值矢量为(A-b,B-c,C-1)。该差值矢量成为IMU安装误差β。
车载IMU对准误差运算部63取得惯性计测装置30识别出的角度即倾斜角AI相对于回转平面PR的倾斜角AID的差值。车载IMU对准误差运算部63根据该差值,取得针对由惯性计测装置30检测出的倾斜角AI的校正值。输出部67将该校正值信息(校正值信号)向搭载于液压挖掘机100的控制器26输出。
若在步骤S5的判断中判断为倾斜角AID与倾斜角AI相等(在步骤S5中为否),则不需要对由惯性计测装置30检测的倾斜角AI进行校正,因此不进行步骤S6的处理,直接进入步骤S7。
接着,在步骤S7~S8的处理中,求出工作装置2移动的平面,能够准确地识别左右方向上的铲尖8a的位置的偏移。在步骤S7中,工作装置动作平面导出部64测量仅使工作装置2的动臂6动作时的动臂6的前端的斗杆销14的轨迹TB。
图7是示出导出工作装置动作平面PI(参照图5)时的动臂6的动作的侧面示意图。目标部40安装于动臂6的前端的、斗杆销14的位置。在该状态下,动臂6相对于回转体3旋转。将液压挖掘机100的主体1作为基座部,将动臂6作为可动部使其转动。典型的是,动臂6从动臂缸10处于收缩侧的行程末端的动臂6被最大限度地举起的位置下落至工作装置2即将与地面接触之前的位置。此时,斗杆7及铲斗8相对于动臂6的相对位置保持恒定。
此时,也可以是,斗杆缸11处于伸长侧的行程末端,斗杆7处于能够向挖掘方向(斗杆7接近动臂6的方向。在图7中为绕斗杆销14的顺时针方向)移动的极限位置。也可以是,铲斗缸12位于伸长侧的行程末端,铲斗8处于能够向挖掘方向(铲斗8接近斗杆7的方向。在图7中绕铲斗销15的顺时针方向)移动的极限位置。通过这样确定斗杆7及铲斗8的位置,如图7所示,工作装置2成为最折叠的姿态,因此使动臂6下落的距离更大。
位置计测部50计测随着动臂6相对于回转体3的相对旋转而移动的目标部40的位置。位置计测部50连续地取得目标部40的三维位置,并将取得的目标部40的三维位置信息(位置信号)输出至信息取得部60的输入部61。
工作装置动作平面导出部64从连续地取得的目标部40的三维位置取得目标部40的轨迹,将其作为轨迹TB。
在步骤S8中,工作装置动作平面导出部64根据在步骤S7中得到的轨迹TB,通过最小二乘法导出工作装置动作平面PI的方程式。工作装置动作平面PI的方程式的导出能够与步骤S2中的回转平面PR的方程式的导出同样地进行。
输出部67将求出的工作装置动作平面PI的方程式的信息(方程式信号)向搭载于液压挖掘机100的控制器26输出。
接着,在步骤S9~S18的处理中,求出动臂6、斗杆7及铲斗8的准确尺寸。在步骤S9中,旋转半径运算部65测量仅使工作装置2的铲斗8动作时的、铲斗8的铲尖8a的轨迹TBk。
图8是示出导出铲斗8的尺寸时的铲斗8的动作的侧面示意图。目标部40安装于铲斗8的铲尖8a的位置。在该状态下,铲斗8以铲斗销15为中心相对于斗杆7旋转。将主体1、动臂6和斗杆7作为基座部,将铲斗8作为可动部使其转动。如图8所示,铲斗8也可以向卸料方向(铲斗8远离车身的方向。在图8中为绕铲斗销15的逆时针方向)移动。此时,动臂6及斗杆7保持静止。
位置计测部50计测随着铲斗8相对于斗杆7的相对旋转而移动的目标部40的位置。位置计测部50连续地取得目标部40的三维位置,并将取得的目标部40的三维位置信息(位置信号)输出至信息取得部60的输入部61。
旋转半径运算部65从连续地取得的目标部40的三维位置取得目标部40的轨迹,将其作为轨迹TBk。
在步骤S10中,旋转半径运算部65根据在步骤S9中得到的轨迹TBk,通过最小二乘法运算铲斗销15的坐标和铲斗销15与安装有目标部40的铲斗8的铲尖8a之间的距离。以使从将铲斗销15作为中心旋转的目标部40的轨迹TBk上的点组到临时决定的圆弧的中心为止的半径误差最小化的方式进行计算,将计算出的中心作为铲斗销15的坐标。
关于从以铲斗销15为中心旋转移动的目标部40的三维位置通过最小二乘法导出旋转中心的坐标和旋转半径的方法,例如在下述的Web网站中进行了解说。
“基于最小二乘法的球的推定”,[令和2年10月27日检索],互联网
在步骤S11中,矢量处理部66生成铲斗销15与铲斗8的铲尖8a之间的矢量Vb。如图8所示,在从侧方观察工作装置2的情况下,矢量Vb是以铲斗销15为起点且以铲斗8的铲尖8a为终点的矢量。
在步骤S12中,旋转半径运算部65测量使工作装置2的斗杆7动作时的、铲斗8的铲尖8a的轨迹TA。
图9是示出导出斗杆7的尺寸时的斗杆7的动作的侧面示意图。目标部40安装于铲斗8的铲尖8a的位置。在该状态下,斗杆7及铲斗8以斗杆销14为中心相对于动臂6旋转。将主体1和动臂6作为基座部,将斗杆7作为可动部使其转动。如图9所示,也可以是,斗杆7向卸料方向(斗杆7远离车身的方向。在图9中绕斗杆销14的逆时针方向)移动。此时,铲斗8相对于斗杆7的相对位置保持恒定。铲斗缸12也可以位于伸长侧和收缩侧中的任一方的行程末端。另外,动臂6保持静止。
位置计测部50计测随着斗杆7及铲斗8相对于动臂6的相对旋转而移动的目标部40的位置。位置计测部50连续地取得目标部40的三维位置,并将取得的目标部40的三维位置信息(位置信号)输出至信息取得部60的输入部61。
旋转半径运算部65从连续地取得的目标部40的三维位置取得目标部40的轨迹,将其作为轨迹TA。
在步骤S13中,旋转半径运算部65根据在步骤S12中得到的轨迹TA,通过最小二乘法运算斗杆销14的坐标和斗杆销14与铲斗8的铲尖8a之间的距离。该运算能够与步骤S10中的旋转中心的坐标和旋转半径的导出同样地进行。
在步骤S14中,矢量处理部66生成斗杆销14与铲斗8的铲尖8a之间的矢量Va’。如图9所示,在从侧方观察工作装置2的情况下,矢量Va’是以斗杆销14为起点且以铲斗8的铲尖8a为终点的矢量。
在步骤S15中,旋转半径运算部65测量使工作装置2的动臂6动作时的、铲斗8的铲尖8a的轨迹VB。
图10是示出导出动臂6的尺寸时的动臂6的动作的侧面示意图。目标部40安装于铲斗8的铲尖8a的位置。在该状态下,动臂6、斗杆7及铲斗8以动臂销13为中心相对于回转体3旋转。将主体1作为基座部,将动臂6作为可动部使其转动。如图10所示,也可以是,动臂6向动臂抬起方向(在图10中为绕动臂销13的逆时针方向)移动。此时,铲斗8相对于斗杆7的相对位置保持恒定。铲斗缸12也可以位于伸长侧和收缩侧中的任一方的行程末端。并且,斗杆7相对于动臂6的相对位置保持恒定。斗杆缸11也可以位于伸长侧和收缩侧中的任一方的行程末端。
位置计测部50计测随着动臂6、斗杆7及铲斗8相对于回转体3的相对旋转而移动的目标部40的位置。位置计测部50连续地取得目标部40的三维位置,并将取得的目标部40的三维位置信息(位置信号)输出至信息取得部60的输入部61。
旋转半径运算部65从连续地取得的目标部40的三维位置取得目标部40的轨迹,并将其作为轨迹VB。
在步骤S16中,旋转半径运算部65根据在步骤S15中得到的轨迹VB,通过最小二乘法运算动臂销13的坐标和动臂销13与铲斗8的铲尖8a之间的距离。该运算能够与步骤S10中的旋转中心的坐标和旋转半径的导出同样地进行。
在步骤S17中,矢量处理部66生成动臂销13与铲斗8的铲尖8a之间的矢量Vs’。如图10所示,在从侧方观察工作装置2的情况下,矢量Vs’是以动臂销13为起点且以铲斗8的铲尖8a为终点的矢量。
在步骤S18中,矢量处理部66求出矢量Vb的大小,将其作为铲斗8的铲尖8a与铲斗销15之间的距离、即铲斗8的尺寸。矢量处理部66求出从矢量Va’减去矢量Vb而得到的差即矢量Va(图9)的大小,将其作为斗杆销14与铲斗销15之间的距离、即斗杆7的尺寸。矢量处理部66求出从矢量Vs’减去矢量Va与矢量Vb之和而得到的差即矢量Vs(图10)的大小,将其作为动臂销13与斗杆销14之间的距离、即动臂6的尺寸。
输出部67将求出的动臂6、斗杆7及铲斗8的尺寸的信息(尺寸信号)向搭载于液压挖掘机100的控制器26输出。
这样,结束取得与液压挖掘机100相关的三维信息的一系列的处理(图4的结束)。
虽然也有与上述的说明一部分重叠的记载,但若对本实施方式的特征性的结构及作用效果进行总结记载,则如下所述。
如图2所示,位置计测部50计测目标部40的位置。目标部40例如如图6、7所示那样安装于动臂6的前端,随着回转体3相对于行驶体5的相对移动而移动,或者随着动臂6相对于回转体3的相对移动而移动。或者目标部40例如如图8~10所示那样安装于铲斗8的铲尖8a,随着铲斗8相对于斗杆7的相对移动而移动(图8),或者随着斗杆7相对于动臂6的相对移动而移动(图9),或者随着动臂6相对于回转体3的相对移动而移动(图10)。
位置计测部50连续地计测移动的目标部40的位置。如图3、4所示,信息取得部60根据从计测得到的目标部40的轨迹,取得液压挖掘机100的工作装置2的尺寸、相对于回转体3相对旋转的工作装置2的轨迹所描绘的平面、相对于行驶体5相对旋转的回转体3的轨迹所描绘的平面等与液压挖掘机100相关的三维信息。也可以不为了算出工作装置2的尺寸而在各销的位置安装测量目标来直接计测各销的位置,因此能够以短时间的简便的作业更准确地得到信息。基于这些信息,能够准确地导出铲斗8的铲尖8a的位置,因此能够提高信息化施工中的工作装置2的位置的运算精度。
如图5所示,回转体3能够相对于行驶体5相对旋转。如图7、10所示,动臂6能够相对于回转体3相对旋转。如图9所示,斗杆7能够相对于动臂6相对旋转。如图8所示,铲斗8能够相对于斗杆7相对旋转。通过在旋转的机械部件安装目标部40,计测呈圆弧状移动的目标部40的位置,能够测量目标部40的圆弧状的轨迹。根据该目标部40的圆弧的轨迹,能够取得与液压挖掘机100相关的三维信息。
如图4及图8~10所示,信息取得部60取得旋转的机械部件的旋转的中心位置。信息取得部60能够根据取得的旋转的中心位置的信息求出机械部件的尺寸。
如图4、8所示,铲斗8相对于斗杆7相对旋转,铲斗8的旋转的中心位置为铲斗销15的位置。信息取得部60取得铲斗销15与目标部40的距离。信息取得部60能够根据取得的距离的信息求出铲斗8的尺寸。
如图1所示,斗杆7经由斗杆销14与动臂6连接。工作装置2具有动臂6和斗杆7经由斗杆销14连接、斗杆7和铲斗8经由铲斗销15连接而成的连杆机构。如图4、10所示,信息取得部60取得相对于回转体3旋转的动臂6的旋转的中心位置即动臂销13与连接动臂6和斗杆7的斗杆销14的距离。信息取得部60能够根据取得的距离的信息来求出动臂6的尺寸。
如图4、9所示,信息取得部60取得连接动臂6和斗杆7的斗杆销14与连接斗杆7和铲斗8的铲斗销15的距离。信息取得部60能够根据取得的距离的信息来求出斗杆7的尺寸。
如图4、7所示,信息取得部60取得通过动臂6相对于回转体3的相对旋转而形成的工作装置动作平面PI的信息。基于取得的工作装置动作平面PI的信息,能够准确地识别左右方向上的铲尖8a的位置的偏移,因此能够提高信息化施工中的铲斗8的铲尖8a的位置的运算的精度。
如图4、6所示,信息取得部60取得通过回转体3相对于行驶体5的相对旋转而形成的回转平面PR的信息。能够根据取得的回转平面PR的信息,准确地取得液压挖掘机100所处的地面的倾斜角度。
如图4、6所示,信息取得部60取得回转平面PR相对于水平面H的倾斜角AID。能够根据取得的倾斜角AID的信息,准确地取得液压挖掘机100所处的地面的倾斜角度。
如图3所示,液压挖掘机100具有惯性计测装置30。惯性计测装置30检测示出液压挖掘机100所处的地面的倾斜角度的倾斜角AI。如图4、6所示,信息取得部60取得倾斜角AT相对于倾斜角AID的差值即IMU安装误差β。根据取得的IMU安装误差β的信息,能够识别基于惯性计测装置30的检测结果相对于液压挖掘机100所处的地面的倾斜角AID具有何种程度的偏移。
如图4、6所示,信息取得部60根据IMU安装误差β,取得针对由惯性计测装置30检测的倾斜角AT的校正值。通过按照取得的校正值校正基于惯性计测装置30的检测结果,在施工时,能够基于惯性计测装置30的检测结果准确地识别液压挖掘机100所处的地面的倾斜角度。由此,能够提高信息化施工中的铲斗8的铲尖8a的位置的运算精度。
如图2、6~10所示,目标部40安装于工作装置2的一个部位。由于也可以不为了取得与液压挖掘机100相关的三维信息而安装多个测定目标,因此能够简化作业,并且能够提高取得的信息的精度。
如图4所示,取得与液压挖掘机100相关的三维信息的信息取得方法例如具备:步骤S9,在该步骤S9中,使铲斗8相对于斗杆7相对移动,连续地计测随着该铲斗8的移动而移动的目标部40的位置;以及步骤S10,在该步骤S10中,根据通过计测得到的目标部40的轨迹TBk,取得铲斗销15的坐标和铲斗销15与铲斗8的铲尖8a之间的距离。
通过短时间的简便的作业,能够更准确地得到与液压挖掘机100相关的三维信息,基于这些信息,能够准确地导出铲斗8的铲尖8a的位置,因此能够提高信息化施工中的工作装置2的位置的运算精度。
在上述的实施方式中,作为作业机械的一例列举了液压挖掘机100,但不限于液压挖掘机100,也可以应用于装载挖掘机、机械式的绳索挖掘机、电动挖掘机、铲斗起重机等其他种类的作业机械。
应当理解本次公开的实施方式在所有方面是例示性的而非限制性的。本发明的范围并不由上述说明表示,而由技术方案表示,其旨在包含与技术方案均等的意思及范围内的所有变更。
附图标记说明:
1主体,2工作装置,3回转体,5行驶体,6动臂,7斗杆,8铲斗,8a铲尖,10动臂缸,11斗杆缸,12铲斗缸,13动臂脚销,14斗杆连结销,15铲斗连结销,26控制器,30惯性计测装置,40目标部,50位置计测部,60信息取得部,61输入部,62回转平面导出部,63车载IMU对准误差运算部,64工作装置动作平面导出部,65旋转半径运算部,66矢量处理部,67输出部,100液压挖掘机,AI、AID倾斜角,H水平面,L激光,OP原点,PI工作装置动作平面,PR回转平面,RX回转轴,TA、TBk、TR、VB轨迹,Va、Vb、Vs矢量。
- 可取得硬件信息的远程服务器系统及其管理方法
- 植物信息取得系统、植物信息取得装置、植物信息取得方法、作物管理系统以及作物管理方法
- 信息取得装置、信息再现装置、信息取得方法、信息再现方法、信息取得程序和信息再现程序