用于外科器械的球窝铰接机构
文献发布时间:2023-06-19 18:32:25
技术领域
本公开涉及外科器械,并且更具体地涉及用于例如在机器人外科系统中使用的外科器械的球窝铰接机构。
背景技术
机器人外科系统越来越多地用于各种外科规程中。一些机器人外科系统包括支撑机械臂的控制台。一个或多个不同的外科器械可被配置用于与机器人外科系统一起使用,并且可选择性地安装到机械臂。机械臂提供到所安装的外科器械的一个或多个输入,以使得能够操作所安装的外科器械。
由机器人外科系统的机械臂提供的输入的数量、类型和配置是对被配置用于与机器人外科系统一起使用的外科器械的设计的约束。也就是说,在设计适于安装在机器人外科系统的机械臂上并与其一起使用的外科器械时,应考虑如何利用机械臂提供的可用输入来实现外科器械的期望功能。
发明内容
如本文所用,术语“远侧”是指所描述的距操作者(无论是外科医生还是机械臂)较远的部分,而术语“近侧”是指所描述的距操作者较近的部分。如本文中利用的术语“约”、“大体上”等意图解释制造、材料、环境、使用和/或测量公差和变化。另外,在一致的程度上,本文所描述的任何方面能够与本文所描述的任何或所有其他方面结合使用。
根据本公开的各方面,提供了一种外科器械,该外科器械包括:壳体;轴,该轴从该壳体延伸并且具有近侧段和远侧段;球窝接头,该球窝接头将该近侧段和该远侧段互连;和端部执行器组件,该端部执行器组件支撑在该轴的该远侧段处。该端部执行器组件可包括第一钳口构件和第二钳口构件。外管环绕该轴并且可操作地联接到该端部执行器组件。该外管可围绕该轴旋转并且被配置成使该端部执行器组件围绕由该轴限定的纵向轴线旋转。该外科器械还包括第一电缆、第二电缆和第三电缆,该第一电缆、该第二电缆和该第三电缆围绕该球窝接头延伸。该第一电缆的远侧端部、该第二电缆的远侧端部和该第三电缆的远侧端部可围绕该球窝接头的窝的外表面相等间隔开。该第一电缆、该第二电缆或该第三电缆中的至少一者的近侧纵向平移使该端部执行器组件相对于由该轴限定的纵向轴线铰接。
在一个方面,该第一电缆的该远侧端部、该第二电缆的该远侧端部或该第三电缆的该远侧端部中的至少一者可限定套环,该套环可操作地联接到该轴的远侧段或该第二钳口构件中的至少一者的柱。另选地,该第一电缆的该远侧端部、该第二电缆的该远侧端部或该第三电缆的该远侧端部中的至少一者可限定球,该球可操作地联接到该轴的该远侧段或该第二钳口构件中的至少一者的柱。
在一个方面,该外管的远侧端部可以可操作地联接到该第一钳口构件,并且该外管的纵向移动可使该第一钳口构件相对于该第二钳口构件枢转。
在一个方面,该第二钳口构件可以是被配置成传输超声能量的超声刀,该球窝接头的窝可限定在该超声刀的近侧部分内,并且该球窝接头的球可形成在细长杆的远侧端部上,该细长杆被配置成将超声能量传输到该超声刀。
在一个方面,该第二电缆和该第三电缆的近侧纵向平移使该端部执行器组件相对于由该轴限定的该纵向轴线沿第一方向铰接,并且该第一电缆的近侧纵向平移使该端部执行器组件相对于由该轴限定的该纵向轴线沿与该第一方向相反的第二方向铰接。附加地,该第一电缆和该第二电缆的近侧纵向平移使该端部执行器组件相对于由该轴限定的该纵向轴线沿第三方向铰接,并且该第三电缆的近侧纵向平移使该端部执行器组件相对于由该轴限定的该纵向轴线沿与该第三方向相反的第四方向铰接。
在一个方面,铰接子组件可设置在该壳体内并且可以可操作地联接到该第一电缆的近侧端部、该第二电缆的近侧端部和该第三电缆的近侧端部。该铰接子组件被配置成引起该第一电缆、该第二电缆和该第三电缆的纵向平移。该铰接子组件可包括第一导螺杆和螺纹地联接到该第一导螺杆的第一螺母、第二导螺杆和螺纹地联接到该第二导螺杆的第二螺母,以及第三导螺杆和螺纹地联接到该第三导螺杆的第三螺母。该第一电缆的该近侧端部联接到该第一螺母,该第二电缆的该近侧端部联接到该第二螺母,并且该第三电缆的该近侧端部联接到该第三螺母。
根据本公开的另一方面,提供了一种外科系统,该外科系统包括:机器人外科系统,该机器人外科系统具有控制装置和机械臂;和外科器械,该外科器械被配置成可操作地联接到该机械臂。该外科器械包括:壳体;轴,该轴从该壳体延伸并限定纵向轴线;细长杆,该细长杆延伸穿过该轴并在该细长杆的远侧端部处限定球;和端部执行器组件,该端部执行器组件包括可操作地联接到该细长杆的该球的窝。该端部执行器组件可包括第一钳口构件和第二钳口构件。外管环绕该轴并且可操作地联接到该端部执行器组件。该外管可围绕该轴旋转并且被配置成使该端部执行器组件围绕由该轴限定的该纵向轴线旋转。该外科器械还可包括第一电缆、第二电缆和第三电缆,该第一电缆、该第二电缆和该第三电缆延伸穿过该轴并且可操作地联接到该端部执行器组件。该第一电缆的远侧端部、该第二电缆的远侧端部和该第三电缆的远侧端部可围绕该窝的外表面相等间隔开。该第一电缆、该第二电缆或该第三电缆中的至少一者的近侧纵向平移使该端部执行器组件相对于由该轴限定的该纵向轴线铰接。
在一个方面,该第一电缆的该远侧端部、该第二电缆的该远侧端部或该第三电缆的该远侧端部中的至少一者可限定套环,该套环可操作地联接到该轴的远侧段或该第二钳口构件中的至少一者的柱。另选地,该第一电缆的该远侧端部、该第二电缆的该远侧端部或该第三电缆的该远侧端部中的至少一者可限定球,该球可操作地联接到该轴的远侧段或该第二钳口构件中的至少一者的柱。
在一个方面,该外管的远侧端部可以可操作地联接到该第一钳口构件,并且该外管的纵向移动使该第一钳口构件相对于该第二钳口构件枢转。
在一个方面,该第二钳口构件可以是被配置成传输超声能量的超声刀,并且该第一钳口构件是夹持臂。
在一个方面,该第二电缆和该第三电缆的近侧纵向平移使该端部执行器组件相对于由该轴限定的该纵向轴线沿第一方向铰接,并且该第一电缆的近侧纵向平移使该端部执行器组件相对于由该轴限定的该纵向轴线沿与该第一方向相反的第二方向铰接。附加地,该第一电缆和该第二电缆的近侧纵向平移使该端部执行器组件相对于由该轴限定的该纵向轴线沿第三方向铰接,并且该第三电缆的近侧纵向平移使该端部执行器组件相对于由该轴限定的该纵向轴线沿与该第三方向相反的第四方向铰接。
在一个方面,铰接子组件可设置在该壳体内并且可以可操作地联接到该第一电缆的近侧端部、该第二电缆的近侧端部和该第三电缆的近侧端部。该铰接子组件被配置成引起该第一电缆、该第二电缆和该第三电缆的纵向平移。该铰接子组件可包括第一导螺杆和螺纹地联接到该第一导螺杆的第一螺母、第二导螺杆和螺纹地联接到该第二导螺杆的第二螺母,以及第三导螺杆和螺纹地联接到该第三导螺杆的第三螺母。该第一电缆的该近侧端部联接到该第一螺母,该第二电缆的该近侧端部联接到该第二螺母,并且该第三电缆的该近侧端部联接到该第三螺母。
根据本公开的另一方面,提供了一种外科器械,该外科器械包括:壳体;轴,该轴从该壳体延伸并限定纵向轴线;细长杆,该细长杆延伸穿过该轴并在该细长杆的远侧端部处限定球;和端部执行器组件,该端部执行器组件限定可操作地联接到该细长杆的该球的窝。该外科器械还包括第一电缆、第二电缆和第三电缆,该第一电缆、该第二电缆和该第三电缆延伸穿过该轴并且可操作地联接到该端部执行器组件。该第一电缆的远侧端部、该第二电缆的远侧端部和该第三电缆的远侧端部围绕该端部执行器组件的该窝的外表面相等间隔开。该第二电缆和该第三电缆的近侧纵向平移使该端部执行器组件相对于由该轴限定的该纵向轴线沿第一方向铰接,并且该第一电缆的近侧纵向平移使该端部执行器组件相对于由该轴限定的该纵向轴线沿与该第一方向相反的第二方向铰接。
在一个方面,该第一电缆和该第二电缆的近侧纵向平移使该端部执行器组件相对于由该轴限定的该纵向轴线沿第三方向铰接,并且该第三电缆的近侧纵向平移使该端部执行器组件相对于由该轴限定的该纵向轴线沿与该第三方向相反的第四方向铰接。
在一个方面,该外科器械还包括铰接子组件,该铰接子组件设置在该壳体内并且可操作地联接到该第一电缆的近侧端部、该第二电缆的近侧端部和该第三电缆的近侧端部。该铰接子组件被配置成引起该第一电缆、该第二电缆和该第三电缆的纵向平移。
在一个方面,该第一电缆的该远侧端部、该第二电缆的该远侧端部或该第三电缆的该远侧端部中的至少一者限定套环,该套环可操作地联接到该轴的远侧段或该端部执行器组件中的至少一者的柱。另选地,该第一电缆的该远侧端部、该第二电缆的该远侧端部或该第三电缆的该远侧端部中的至少一者限定球,该球可操作地联接到该轴的远侧段或该端部执行器组件中的至少一者的柱。
附图说明
下文中参考图式描述本公开的各种方面和特征,其中相同的标号在若干视图中的每一个中指代相同或对应的元件。
图1A为根据本公开提供的被配置用于安装在机器人外科系统的机械臂上的外科器械的透视图;
图1B为图1A的外科器械的近侧部分的后透视图;
图2为被配置成可释放地接纳图1A的外科器械的示例性机器人外科系统的示意性说明;
图3为图1A的外科器械的侧透视图,其中外壳被移除;
图4A为根据本公开的一个方面的与图1A的外科器械一起使用的球窝配置的后透视图;
图4B为根据本公开的另一方面的与图1A的外科器械一起使用的另一球窝配置的后透视图;
图5A为图1A的外科器械的远侧部分的侧视图,其中端部执行器组件被铰接;
图5B为图1A的外科器械的远侧部分的顶视图,其中端部执行器组件被铰接;
图6为图1A的外科器械的远侧部分的侧视图,其中端部执行器组件被铰接并且外管被移除;
图7A为图1A的外科器械的端部执行器组件的前视图;
图7B为图1A的外科器械的端部执行器组件的侧视图;
图8A至图8D为处于各种铰接位置的图1A的外科器械的端部执行器组件的前视图;并且
图9为示出图1A的外科器械的端部执行器组件的铰接包壳的前侧透视图。
具体实施方式
本公开涉及外科器械,并且更具体地涉及用于例如在机器人外科系统中使用的外科器械的球窝铰接机构。
机器人装置通常利用一个或多个铰接接头来增加腹腔内外科器械的灵巧性和接近性。铰接接头由联接到相应马达的电缆控制。例如,典型机器人可具有四个马达来控制四个电缆,该四个电缆可用于铰接、钳口枢转、刀投掷和/或端部执行器需要的任何其他机械动作。对于腕式接头,这通常需要两个马达才能在两个自由度内实现移动。
本公开提供了一种利用球窝接头的铰接机构,其中三个铰接电缆联接到窝。端部执行器组件(例如,超声刀和夹持钳、抓钳、双极钳、电外科血管密封钳、单极电极等)可在球窝接头上以三个协同定位的自由度旋转,从而允许在三维锥形包壳而不是平面内进行铰接,并具有紧凑的配置。端部执行器组件可围绕其中心轴线旋转,使得能够将端部执行器组件定位在抓持或处理组织所需的任何取向上。
所公开的具有球窝接头的铰接机构具有优于传统铰接接头的优点,这至少是因为其紧凑性及其以更少的运动、更少的电缆和/或更少的马达到达其移动包壳中的任何点的能力。具体地,所公开的球窝铰接配置仅需要三个铰接电缆并且减少了致动(例如,铰接)所需的控制马达的数量。如下文详细描述的,通过拉动或放松(例如,推动)三个铰接电缆中的一个或多个铰接电缆来独立地控制三个铰接电缆中的每个铰接电缆。三个铰接电缆是将球形接头铰接到其铰接包壳中的任何位置所需的最少电线数量。下文还详细描述了本公开的附加的或替代的方面和特征。
在各方面,致动电缆以能够移动的方式联接到接头的窝部分,并且可经由另一球窝接头、销和套环接头或将致动电缆联接到窝但仍允许独立运动的任何其他类型的接头联接到接头的窝部分。在各方面,柔性外管可旋转以旋转端部执行器组件。这使得端部执行器组件的铰接范围能够达到其铰接包壳中的任何取向。外管可经由分段、螺旋U形接头或其他配置铰接,同时保持扭转和线性完整性。
参考图1A至图1B、图2和图3,根据本公开提供的外科器械10大体上包括:壳体20;轴30,该轴从壳体20朝远侧延伸;端部执行器组件40,该端部执行器组件从轴30朝远侧延伸;以及齿轮箱组件100(图3),该齿轮箱组件设置在壳体20内并且与端部执行器组件40可操作地相关联。外科器械10在本文详述为被配置用于与机器人外科系统(例如,机器人外科系统1000(图2))一起使用的铰接电外科夹钳。然而,下文详述的根据本公开提供的外科器械10的方面和特征同样可适用于与其他合适的外科器械一起使用和/或用于其他合适的外科系统。
特别参考图1A,外科器械10的壳体20包括第一主体部分22a、第二主体部分22b和近侧面板24,该第一主体部分、该第二主体部分和该近侧面板配合以将齿轮箱组件100(图3)包封在其中。近侧面板24包括限定于其中的孔,齿轮箱组件100的第一输入端110、第二输入端120、第三输入端130和第四输入端140(图1B)延伸穿过该孔,以便联接到机器人外科系统1000(图2)的驱动器(例如,马达)。一对闩锁杆26(在图1中仅示出其中一个)从壳体20的相对侧向外延伸,且使得壳体20能够与例如机器人外科系统1000(图2)的外科系统的机械臂可释放地接合。
外科器械10的轴30包括近侧段34和远侧段32。远侧段32可操作地联接到端部执行器组件40并且被配置成相对于近侧段34铰接。外管45环绕轴30的近侧段34和远侧段32,并且可操作地联接到端部执行器组件40的至少一部分。外管45的至少一部分是柔性的,以使得端部执行器组件40能够相对于轴30的近侧段34铰接。附加地或另选地,外管45的一部分可具有螺旋形切口或其他柔性增强特征或结构,以实现端部执行器组件40的铰接。在配置中,外管45可相对于轴30旋转,并且外管45的远侧端部固定地联接到端部执行器组件40的至少一部分(例如,固定地联接到第一钳口构件42),使得外管45的旋转引起端部执行器组件40(例如,第一钳口构件42)的至少一部分围绕外科器械10的纵向轴线“L”的对应旋转。
多个铰接电缆38(图4A)(例如,三个(3)铰接电缆)或其他合适的致动器延伸穿过轴30并且在其远侧端部处联接到轴30的远侧段32或第二钳口构件44(例如,其中第二钳口构件是超声刀)。更具体地,铰接电缆38在其远侧端部处可操作地联接到轴30的远侧段32或第二钳口构件44,并且从轴30的远侧段32或第二钳口构件44朝近侧延伸,穿过轴30的近侧段34,并且进入壳体20中,其中铰接电缆38可操作地联接到齿轮箱组件100的铰接子组件200,以使得远侧段32(以及因此端部执行器组件40)能够相对于近侧段34和壳体20选择性地铰接。
继续参考图1A,端部执行器组件40包括第一钳口构件42和第二钳口构件44,其中第一钳口构件42围绕枢轴50相对于第二钳口构件44可枢转地联接。钳口构件42可以可枢转地联接到轴30的远侧段32和/或外管45。此配置使得钳口构件42能够例如通过外管45的线性运动,相对于钳口构件44和轴30的远侧段32在间隔开位置(例如,端部执行器组件40的打开位置)和接近位置(例如,端部执行器组件40的闭合位置)之间枢转,以用于将组织抓持在它们之间。
在一些配置中,第一可移动钳口构件42包括更刚性的结构体,该结构体支撑更具顺应性的钳口衬里(限定组织接触表面46),并且第二钳口构件44是超声刀(限定组织接触表面48),其中在闭合位置,钳口衬里和超声刀配合以将组织抓持在其组织接触表面46、48之间。在此类配置中,超声换能器(未示出)可定位在铰接部分的近侧(例如,定位在轴30的近侧段34内或在壳体20内),并且波导(未示出)(该波导包括一个或多个铰接部分(例如,柔性部分、接口部分、连杆部分等))被设置成延伸穿过铰接部分以将从超声换能器延伸的超声变幅杆与刀互连,使得由超声换能器产生的超声能量可沿着波导传输到刀,以用其处理组织,而不管铰接部分的铰接如何。另选地,超声换能器可设置在轴30的远侧段32内(例如,设置在铰接部分的远侧),并且可经由超声变幅杆连接到刀(在它们之间具有或不具有超声波导),使得由超声换能器产生的超声能量沿着超声变幅器(和波导,如果提供的话)传输到刀,用于用超声能量处理组织。
在其他配置中,如上所述,钳口构件42、44可被配置用于供应其他能量(例如,单极RF、双极RF、微波、热激光等),和/或用于其他目的(例如,抓持、缝合、夹持)。例如,关于双极RF能量,第一钳口构件42的组织接触表面46和第二钳口构件44的组织接触表面48至少部分地由导电材料形成,并且可通电到不同的电势,以使电能能够传导通过抓持在它们之间的组织。在此类配置中,外科器械10限定穿过壳体20和轴30到端部执行器组件40的传导路径(未示出),该传导路径可包括引线、接触件和/或导电部件,以使第一钳口构件42的组织接触表面46或第二钳口构件44的组织接触表面48中的至少一者能够电连接到能量源(未示出)(例如,电外科发生器),用于向组织接触表面46或组织接触表面48中的一者供应能量,以处理(例如,密封)抓持在第一钳口构件42和第二钳口构件44之间的组织。
作为单侧移动的替代方案,可实现双侧移动,由此第一钳口构件42和第二钳口构件44都可相对于彼此和轴30的远侧段32枢转。
在各方面,无论钳口构件42、44的特定能量形态和/或配置如何,驱动杆(未示出)都可操作地联接到第一钳口构件42或第二钳口构件44中的至少一者,使得驱动杆(未示出)的纵向致动使第一钳口部件42相对于第二钳口构件44在间隔开位置(例如,打开)和接近位置(例如,闭合)之间枢转(或者反之亦然)。然而,也可考虑用于使第一钳口构件42相对于第二钳口构件44在间隔开位置和近似位置之间枢转的其他合适的机构和/或配置。例如,在一个方面,外管45的远侧端部联接到第一钳口构件42或第二钳口构件44中的至少一者,并且外管45的远侧纵向平移使第一钳口部件42或第三钳口部件44中的一者相对于另一者枢转。
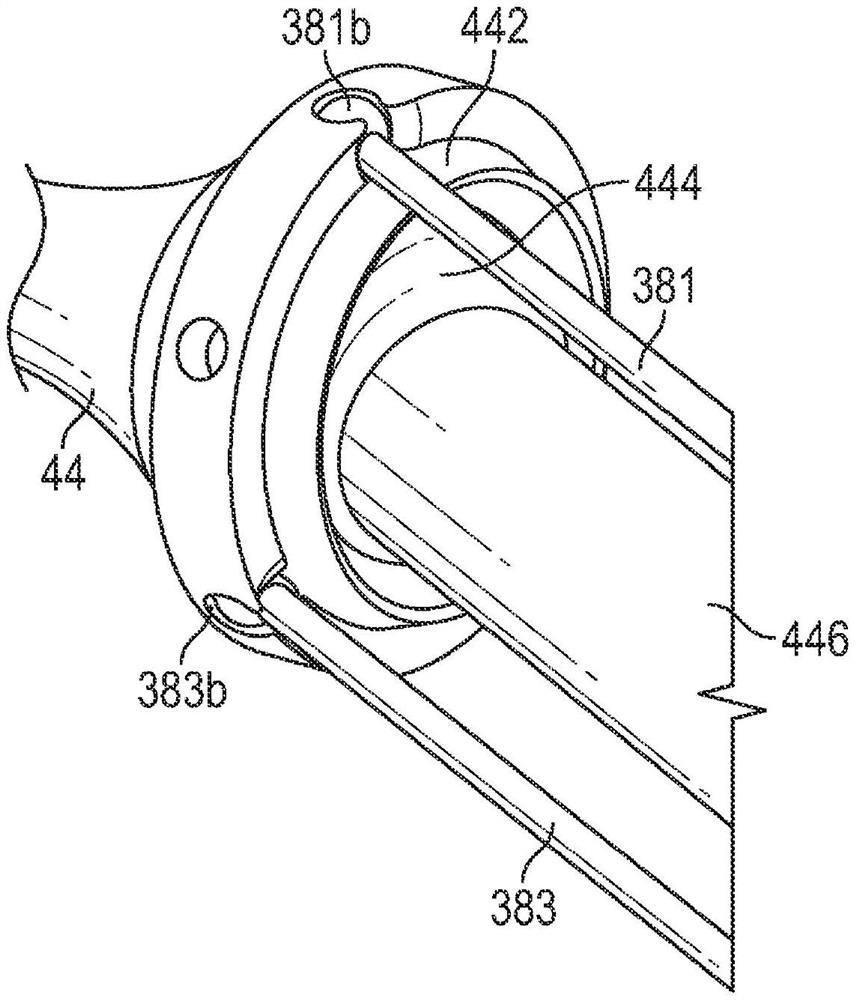
暂时参考图4A和图4B,第二钳口构件44的近侧部分可延伸穿过轴30的远侧段32,并限定窝442,该窝联接到形成在细长杆446的远侧端部上的球444或延伸穿过轴30的其他合适支撑件,以在第二钳口构件44与细长杆446之间形成球窝接头。在其中第二钳口构件44是超声刀并且超声换能器在铰接部分的近侧的配置中,窝442可限定在超声刀的近侧端部部分内,并且细长杆446(包括形成在其远侧端部部分上的球444)可以是波导,该波导可铰接地联接到刀并且被配置成通过球窝接头将超声能量传输到刀,而不管刀相对于波导的铰接位置如何。另选地,窝442可形成在轴30的远侧段32或与其接合固定的另一结构上,和/或球442可形成在轴30的近侧段32或与其接合固定的另一结构上。附加地或另选地,球和窝444、442可以颠倒。
参考图3,如上所述,齿轮箱组件100设置在壳体20内,并且包括铰接子组件200和钳口驱动子组件400。铰接子组件200分别可操作地联接在齿轮箱组件100的第一输入端110、第二输入端120和第三输入端130(图1B)与铰接电缆38(图1A)之间,使得在接收到进入第一输入端110、第二输入端130和/或第三输入端120的适当输入时,铰接子组件200操纵铰接电缆38(图1A)以相对于由轴30限定的纵向轴线“L”沿期望方向铰接端部执行器组件40,以例如使端部执行组件40俯仰和/或偏航。
铰接子组件200的导螺杆的旋转引起相应螺母沿着导螺杆的长度的对应纵向平移。每个电缆38联接到相应螺母,使得螺母的近侧纵向平移引起相应电缆38的近侧纵向平移,并且螺母的远侧纵向平移导致松弛被提供给与其联接的对应电缆38。在此配置下,第一输入端110、第二输入端120和第三输入端130的旋转实现了相应螺母的纵向平移,这些螺母联接到相应铰接电缆38(图1A)的近侧部分,以相对于由轴30限定的纵向轴线“L”铰接端部执行器组件40。具体地,齿轮箱组件100的铰接子组件200包括分别联接到第一输入端110、第二输入端120和第三输入端130的第一导螺杆111、第二导螺杆112和第三导螺杆113。第一螺母210螺纹地联接到第一导螺杆111,第二螺母220螺纹地联接到第二导螺杆112,并且第三螺母230螺纹地联接到第三导螺杆113。第一输入端110、第二输入端120和第三输入端130的旋转引起第一导螺杆111、第二导螺杆112和第三导螺杆113的相应旋转,这继而引起第一螺母210、第二螺母220或第三螺母230的对应的对应纵向平移。
钳口驱动子组件400可操作地联接在齿轮箱组件100的第四输入端140(图1B)与驱动杆(未示出)或其他合适的结构(例如,外管45)之间,使得在接收到进入第四输入端140的适当输入后,钳口驱动子组件400使第一钳口构件42和/或第二钳口构件44在间隔开位置和接近位置之间枢转,以将组织抓持在它们之间并施加适当闭合力范围内的闭合力。在各方面,钳口驱动子组件400可操作地联接到外管45,使得钳口驱动子组件400既可纵向平移外管45(例如,以使第二钳口构件45枢转),也可旋转外管45(例如,使端部执行器组件40或其一部分围绕纵向轴线“L”旋转)。
当外科器械10安装在机器人外科系统1000(图2)上时,齿轮箱组件100被配置成与机器人外科系统1000(图2)可操作地介接,以实现齿轮箱组件100的机械操作,从而提供上述详细功能。也就是说,机器人外科系统1000(图2)向齿轮箱组件100的第一输入端110、第二输入端120、第三输入端130和第四输入端140选择性地提供输入以铰接端部执行器组件40、将组织抓持在第一钳口构件42与第二钳口构件44之间,和/或处理抓持的组织。然而,还可以考虑的是,齿轮箱组件100可被配置成与任何其他合适的外科系统(例如,手动外科手柄、电动外科手柄等)介接。出于本文中的目的,大体上对机器人外科系统1000(图2)进行描述。
转到图2,机器人外科系统1000被配置为根据本公开使用。省略了与本公开的理解无密切关系的机器人外科系统1000的方面和特征,以免在不必要的细节上混淆本公开的方面和特征。
机器人外科系统1000通常包括:多个机器人臂1002、1003;控制装置1004;和与控制装置1004联接的操作控制台1005。操作控制台1005可包括显示装置1006,该显示装置可以特别设置为显示三维图像;和手动输入装置1007、1008,通过该手动输入装置,例如外科医生的人员能够以第一操作模式远程操纵机器人臂1002、1003。机器人外科系统1000可以被配置成以微创方式用于躺在患者台1012上的待治疗的患者1013。机器人外科系统1000还可包括数据库1014,特别是与控制装置1004联接的数据库,其中存储有例如来自患者1013和/或解剖学图册的术前数据。
机器人臂1002、1003中的每个机器人臂可包括通过接头连接的多个构件以及所安装的装置,所安装的装置可以是例如外科工具“ST”。外科工具“ST”中的一个或多个外科工具可以是外科器械10(图1A),因此在机器人外科系统1000上提供此类功能。
机器人臂1002、1003可由连接到控制装置1004的电动驱动器(例如,马达)驱动。控制装置1004(例如,计算机)可被配置成具体通过计算机程序以使机器人臂1002、1003以及由此机器人臂的所安装的外科工具“ST”分别根据来自手动输入装置1007、1008的对应输入来执行期望移动和/或功能的方式来激活马达。控制装置1004还可以以使得其调节机器人臂1002、1003和/或马达的移动的方式进行配置。
参考图1A至图1B、图3和图4A至图4B,如上所述,关于端部执行器组件40相对于轴30的近侧段34的铰接,铰接电缆38的致动可通过第一输入端110、第二输入端120或第三输入端130的旋转来实现。具体地,第一电缆381的近侧端部经由第一螺母210可操作地联接到第一输入端110,第二电缆382的近侧端部经由第二螺母220可操作地联接到第二输入端120,并且第三电缆383的近侧端部经由第三螺母230可操作地联接到第三输入端130。第一电缆381的远侧端部381b、第二电缆382的远侧端部382b和第三电缆383的远侧端部383b各自可操作地联接到轴30的远侧段32或第二钳口构件44(例如,其中第二钳口构件是超声刀),例如围绕远侧段32的圆周相等间隔开或围绕第二钳口构件44的窝442的外表面相等间隔开。具体地,第一电线381、第二电线382和第三电线383的远侧端部381b、382b和383b可限定相应的套环391、392和393,使其具有带套环配置(图4A),以便可枢转地联接到轴30的远侧段32或第二钳口构件44的对应柱(或球)。另选地,第一电线381、第二电线382和第三电线383的远侧端部381b、382b和383b可限定相应的球395、396、397,使其具有球窝配置(图4B),以便可枢转地联接到轴30的远侧段32或第二钳口构件44的对应窝。
参考图5A至图5B、图7A至图7B、图8A至图8D和图9,端部执行器组件40到期望取向的铰接是由第一电缆381、第二电缆382和/或第三电缆383的协调致动(例如,纵向移动)和/或外管45的旋转引起的。端部执行器组件40可围绕限定铰接包壳40e的运动范围铰接。
为了实现端部执行器组件40(图8A)的第一方向(例如,竖直向上)铰接,第二电缆382和第三电缆383沿箭头“D”的方向(图5B)的同时且基本上相等的近侧纵向平移(与第一电缆381沿箭头“E”的方向(图5B)的对应远侧纵向平移,或提供给第一电缆381的松弛一致)使端部执行器组件40沿箭头“DD”的方向(图5A和图8A)铰接。另一方面,第一电缆381沿与箭头“E”的方向相反的方向(图5B)的近侧纵向平移(与第二电缆382和第三电缆383沿与箭头“D”的方向相反的方向(图5B)的对应的同时且基本上相等的远侧纵向平移,或提供给第二电缆382和第三电缆383的松弛一致)使端部执行器组件40沿箭头“EE”的方向(图8A)(例如,第二相反(竖直向下)方向)铰接。
为了实现端部执行器组件40(图8B)的第三方向和第四方向(例如,水平)铰接,第二电缆382沿箭头“D”的方向(图5B)的近侧纵向平移(与第三电缆383沿与箭头“D”的方向相反的方向(图5B)的同时远侧纵向平移,或提供给第三电缆383的松弛一致)使端部执行器组件40沿箭头“FF”的方向(图8B)水平铰接。另一方面,第三电缆383沿箭头“D”的方向(图5B)的近侧纵向平移(与第二电缆382沿与箭头“B”的方向相反的方向(图5B)的同时远侧纵向平移,或提供给第二电缆382的松弛一致)使端部执行器组件40沿箭头“GG”的方向(图8B)水平铰接。在这两种情况下,也就是说,当期望将端部执行器组件40仅沿箭头“FF”或“GG”的水平方向铰接,而不使其进行任何竖直移动时,使第一电缆381纵向平移和/或使外管45旋转一定程度,以确保端部执行器组件40的真实水平铰接。
还可通过调整第一电缆381、第二电缆382和第三电缆383中的每一者的纵向移动的相对程度(致动长度),使端部执行器组件40沿无限数量的混合竖直水平方向(图8C)中的任一混合竖直水平方向铰接。例如,如图8C所示,端部执行器组件40沿箭头“DD”的方向竖直地铰接并且沿箭头“GG”的方向水平地铰接。此混合铰接通过第二电缆382和第三电缆383沿箭头“D”的方向(图5B)的不相等的近侧纵向平移来实现,其中第三电缆383纵向平移的程度大于第二电缆382纵向平移的程度。第二电缆382和第三电缆383两者沿箭头“D”的方向的近侧纵向平移,尽管不相等,但与第一电缆381沿箭头“E”的方向(图5B)的同时远侧平移,或提供给第一电缆381的松弛一致。这样的具体描述仅仅是示例性的,并且应当理解,可调整第一电缆381、第二电缆382和第三电缆383之间的致动和/或外管45的旋转的任何组合,以使端部执行器组件40在铰接包壳40e(图9)内沿竖直方向、水平方向或组合的竖直方向和水平方向铰接。
除了上述端部执行器组件40的铰接之外,外管45围绕轴30的旋转还导致端部执行器组件40围绕由轴30限定的中心纵向轴线“L”旋转,例如沿箭头“R”的方向(图7A至图7B和图8D)旋转。当端部执行器组件40未铰接时(当端部操作器组件40与纵向轴线“L”纵向对准时),以及当端部操纵器组件40沿竖直方向、水平方向或组合的竖直-水平方向中的任一个方向铰接时,端部执行器组件40的这种旋转都是可能的。外管45的旋转使钳口构件42、44中的一者或两者以期望取向取向。在一些配置中,外管45的旋转使钳口构件42、44两者彼此结合旋转。另选地,外管45的旋转可使钳口构件42围绕钳口构件44旋转,以使钳口构件42在围绕钳口构件44的不同径向位置处取向,从而将组织在对应的径向位置夹持在它们之间。端部执行器组件40的铰接(通过第一电缆381、第二电缆382和/或第三电缆383的纵向平移实现)与端部执行器组件40(或其一部分)的旋转(通过外管45的旋转实现)的组合允许端部执行器组件40在铰接包壳40e(图9)内的任何位置都具有一定运动范围。
虽然在图式中示出了根据本公开的装置的若干特定版本,但并不旨在将本公开内容限于此,因为本公开旨在与本领域所允许的范围一样宽并且说明书应同样阅读。因此,以上描述不应被解释为限制性的,而仅仅是作为特定方面的例证。本领域的技术人员能够设想在本文所附权利要求书的范围和实质内的其他修改。
应当理解,本文公开的装置的各种特征可与说明书和附图中具体呈现的组合不同的组合进行组合。还应该理解,取决于示例,本文描述的任何过程或方法的某些动作或事件可以不同的顺序执行,可以完全添加、合并或省略(例如,执行所述技术可能不需要所有描述的动作或事件)。另外,尽管为清楚起见,根据本公开的装置的某些方面被描述为由单个模块或单元执行,但应当理解,本公开的技术可通过与例如医疗装置相关联的单元或模块的组合来执行。
- 用于控制外科缝合和切割器械的系统和方法
- 用于控制外科缝合和切割器械的系统和方法
- 用于操作外科器械的方法
- 用于外科器械的铰接机构
- 用于外科器械的铰接机构