一种新能源全自动植树机
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及一种植树机,属于全自动器械领域,尤其涉及一种新能源全自动植树机。
背景技术
全球沙漠化日益严重,近些年来,我国提出了绿色发展理念,而植树造林就是工作重点之一。要实现我国森林资源建设的总体目标,机械化植树造林是必由之路。三北防护林的成功建成有效说明了植树造林是解决土地荒漠化的有效方法之一现阶段解决沙漠化最好的办法就是防沙固沙即植树造林、沙漠披绿。
目前沙漠植树一般是通过人力进行固沙、植树、培土、浇水等步骤,同时申请号为202111209411.8,申请日为2021.10.18的发明专利申请,公开了一种植树机器人,该型植树机器人的结构包括可移动机架、浇水机构、钻坑机构、抓持机构、培土机构;可移动机架包括底座、树苗安置箱和水箱;浇水机构包括水泵、电磁阀、流量计和水路管道;钻坑机构用于向正下方土壤钻进用于容纳树苗根部的坑;抓持机构用于从树苗安置箱内抓取树苗,并将树苗在操作区间内调整姿态和下放;两组培土机构对称分别设置在框架A和框架B内,并相对于操作区间对称布置,其用于将操作区间下端两侧的土壤向操作区间下端中心区域推拢。本发明实现了全流程自动化的植树操作,相比现有的农林种植机械,极大的减轻了操作人员的工作量,提升了植树效率。
虽然这种装置可以自动化进行植树操作,但其仍存在以下缺陷:
1、采用人力进行固沙植树费时费力,植树效率较低。
2、现有的植树装置需要定期充电或者补充燃油,目前的充电装置充电时间较长,限制了植树效率,而采用燃油时会排放燃烧废气,污染生态环境。
3、现有的植树装置驱动结构常常采用轮式驱动,当土质松软或者需要在沙漠等环境植树时,无法避免驱动轮陷入地面,无法适用于沙地环境。
发明内容
本发明的目的是克服现有技术中存在植树效率较低、无法适用于沙地环境的缺点,提供了一种植树效率较高、能够在沙漠环境全天候进行植树工作的新能源全自动植树机。
为实现以上目的,本发明的技术解决方案是:
一种新能源全自动植树机,所述新能源全自动植树机包括:底盘、驱动装置、钻孔机构、树苗传输机构、机械臂、灌溉装置、培土装置与供电机构,所述底盘的底部固定设置有驱动装置,所述底盘顶部的中轴线上由车头方向到车尾方向依次固定设置有钻孔机构、树苗传输机构、机械臂、灌溉装置、培土装置;所述钻孔机构的底部设置有钻机,该钻机的行程为沿竖直方向上下移动,所述钻机的底端与钻头的顶端相连接,钻头的底端向下延伸,所述树苗传输机构内设置有多根树苗,所述机械臂为带有夹持机构的机械臂,所述夹持机构与树苗的侧围进行夹持配合,所述灌溉装置的出水口高于地面设置,所述培土装置的作用范围与地面相接触或高于地面,所述钻头对地面的作用位置位于底盘的行进路径上,所述出水口的覆盖范围大于钻头对地面的作用位置,所述培土装置的作用范围大于钻头对地面的作用位置,且出水口的覆盖范围、培土装置的作用范围都位于底盘的行进路径上。
所述树苗传输机构包括树苗传输电机、主动轮、从动轮、固定滑道与树苗固定架,所述树苗传输电机的壳体固定设置于底盘的顶部,所述树苗传输电机的动力输出轴沿竖直方向向上设置,所述树苗传输电机的动力输出轴上固定设置有主动轮,所述主动轮为不完全齿轮,所述树苗传输电机的壳体上沿水平方向固定设置有固定滑道,所述固定滑道为开口向上设置的环形滑道,所述固定滑道的开口内设置有树苗,所述固定滑道与树苗的底部滑动配合,所述树苗固定架为圆形结构,所述树苗固定架旋转中心的底部固定设置有连接轴,所述连接轴的底部通过从动轮与主动轮啮合,所述树苗固定架外圆周的底部均布有多个向下延伸的限位板,限位板的底端与固定滑道底部内延而成的内延环的顶部相连接,所述树苗固定架的直径与固定滑道的内径相同,所述树苗固定架的外圆周上均布有多个树苗固定叉,所有树苗固定叉都设置于固定滑道的正上方,所述树苗固定叉与树苗限位配合。
所述钻孔机构包括驱动活塞、钻机支架与钻机,所述驱动活塞的活塞座沿竖直方向固定设置于底盘的车头侧的顶部,所述驱动活塞的活塞杆的端部与钻机支架的一端固定连接,所述钻机支架的另一端与钻机的壳体固定连接。
所述驱动装置包括支撑架、一号驱动电机、二号驱动电机与两组履带轮组,所述支撑架为框式支架,所述支撑架一侧的内壁上固定设置有一号驱动电机,所述支撑架另一侧的内壁上固定设置有二号驱动电机,所述支撑架两侧的外壁各固定设置有一组履带轮组,所述一号驱动电机与二号驱动电机分别与其对应侧的履带轮组传动配合。
所述机械臂包括机械臂旋转底座、第一舵机、第一连杆、第二舵机、第二连杆、第三舵机、第四舵机与夹持机构,所述机械臂旋转底座的底部固定设置于底盘的顶部,所述机械臂旋转底座为动力输出轴竖直向上设置的旋转电机,所述旋转电机的动力输出轴竖直向上设置,所述旋转电机的动力输出轴上固定设置有转盘,所述转盘的顶部固定设置有第一舵机,所述第一舵机的动力输出轴平行于底盘设置,所述第一舵机的动力输出轴与第一连杆的一端铰接,所述第一连杆的另一端与第二舵机的其中一个动力输出轴铰接,所述第二舵机的另一个动力输出轴与第二连杆的一端铰接,所述第二连杆的另一端与第三舵机的壳体固定连接,所述第三舵机的动力输出轴与第二连杆的一端固定连接,所述第二连杆的另一端与第四舵机铰接,所述第四舵机的壳体上固定设置有夹持机构,所述夹持机构上带有两个相对设置的夹爪,所述夹爪上带有与树苗相配合的凹陷,所述夹爪上的凹陷内固定设置有压力传感器。
所述灌溉装置包括水箱、水泵与灌溉管,所述水箱的底部固定设置于底盘的顶部,所述水箱内固定设置有水泵,所述灌溉管穿过水箱车尾侧的侧壁后与水箱的侧壁密封配合,所述灌溉管的一端与水泵相连通,所述灌溉管的出水口高于地面设置。
所述培土装置包括培土舵机、主动杆、被动杆与填土杆,所述培土舵机通过与其一体结构的舵机固定支架固定设置于底盘的车尾端,所述培土舵机的动力输出轴与主动杆的一端固定连接,所述主动杆的另一端与填土杆的中部铰接,所述填土杆近底盘外侧的一端与被动杆的端部铰接,所述填土杆近底盘中心的一端固定设置有弧形培土板,所述弧形培土板的开口方向正对底盘中心方向设置,被动杆的另一端与舵机固定支架铰接,所述舵机固定支架、动杆、被动杆与填土杆相互铰接形成平行四边形连杆结构,所述底盘上设置的两个培土装置中的弧形培土板相对设置,所述底盘一侧的培土舵机为一号培土舵机,所述底盘另一侧的培土舵机为二号培土舵机。
所述供电机构的数量为两个,两个供电机构对称设置于底盘的两侧,所述供电机构为带有蓄电池的太阳能电池板。
所述固定滑道包括内环形侧壁、外环形侧壁与环形底板,内环形侧壁与外环形侧壁的旋转中心相重合,内环形侧壁与外环形侧壁的底部通过环形底板相连接,所述环形底板与内环形侧壁的连接处向圆心方向内延形成内延环,所述环形底板与树苗的底端限位配合,所述树苗插入内环形侧壁、外环形侧壁与环形底板形成的环形槽后与环形槽滑动配合,所述树苗固定架为环形结构,所述树苗固定架的中部固定设置有十字形支架,所述十字形支架的四个端部与环形结构的内壁固定连接,所述十字形支架中心位置的底部固定设置有连接轴,所述树苗固定架的外侧壁上均布有多个树苗固定叉,所述树苗固定叉包括两根叉齿,所述树苗插入两根叉齿之间后与叉齿限位配合。
所述第一连杆包括两个门型框架,所述门型框架的左、右侧壁通过横板互相连接,两个门型框架上的横板互相连接为一体结构,其中一个门型框架的左、右侧壁之间设置有第一舵机,另一个门型框架的左、右侧壁之间设置有第二舵机,所述门型框架的左、右侧壁与其对应的舵机的动力输出轴固定连接。
与现有技术相比,本发明的有益效果为:
1、本发明一种新能源全自动植树机中,植树机上由车头方向到车尾方向依次固定设置有钻孔机构、树苗传输机构、机械臂、灌溉装置与培土装置,本发明在使用时钻孔机构的钻头在旋转的同时上下移动,在地面上打出植树孔,同时本发明通过驱动装置向前行驶,使植树孔移动到植树机尾部灌溉装置与培土装置的工作范围内,同时灌溉装置向植树孔内注水,此时树苗传输机构将树苗传输到机械臂取料位置,机械臂取出树苗并插入植树孔中,培土装置的两个弧形培土板合拢将土壤向树苗出推拢并清理多余的沙土,当机械臂和培土装置进行工作时,钻孔机构同步工作打出新的植树孔,可以全流程自动化的同步进行打孔、插苗和培土作业,不仅提高了自动化程度而且有效提高植树效率。因此,本设计可以全流程自动化的打孔、插苗与培土作业,有效提高了自动化程度,同时打孔作业与插苗、培土作业同步进行,有效提高了植树效率。
2、本发明一种新能源全自动植树机中,树苗传输机构的树苗传输电机带动树苗固定架旋转将树苗传输到机械臂取料位置,树苗传输电机通过不完全齿轮与树苗固定架上的从动轮传动配合,不完全齿轮上有齿部分长度为从动轮的周长除以树苗固定架上设置的树苗固定叉数量,使得不完全齿轮每转动一周,树苗固定架正好将后一个树苗固定叉旋转到前一个树苗固定叉的位置,树苗固定叉包含两个叉齿,两个叉齿位于固定滑道的正上方,固定滑道与树苗底部限位配合,可以稳固的托载树苗,固定滑道的内圆周设置有内延环,树苗固定架通过其底部设置的限位板与内延环限位,保证了树苗固定架旋转的稳定。因此,本设计可以通过树苗传输电机上的不完全齿轮保证树苗准确的位于机械臂取料位置,同时树苗固定架与固定滑道相配合,可以稳固的托载树苗,避免机械臂取料失败,有效提高了系统可靠度。
3、本发明一种新能源全自动植树机中,驱动装置为履带结构,通过左、右两个驱动电机各带动一组履带轮组,使得本设计不容易陷入地面中,在沙漠、湿地与沼泽等环境下进行植树作业,有效提高了使用范围。因此,本设计的驱动装置不容易陷入地面中,可以适应沙漠、湿地与沼泽等环境,有效提高了本设计的使用范围。
4、本发明一种新能源全自动植树机中,底盘的两侧各设置有一个供电机构,供电机构为带有蓄电池的太阳能电池板,在有阳光照射时本设计通过太阳能电池板供电,当不工作时太阳能电池板产生的电能储存在蓄电池内,当没有阳光照射时,系统通过蓄电池供电进行工作。因此,本设计可以通过太阳能电池板提供电能,避免使用燃油污染环境,有效提高系统环保性,同时在缺少阳光时通过蓄电池进行供电,保证植树机全天候工作。
附图说明
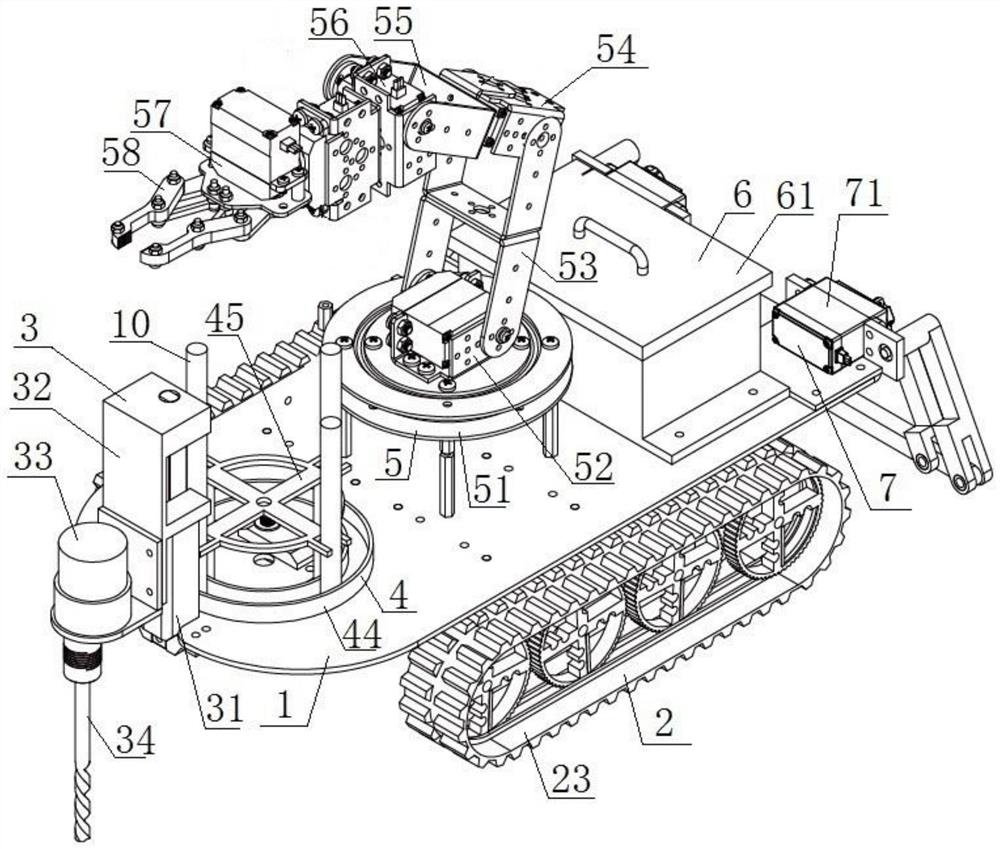
图1是本发明的结构示意图。
图2是本发明另一个视角的结构示意图。
图3是本发明的侧视图。
图4是本发明的正视图。
图5是本发明的俯视图。
图6是本发明的仰视图。
图7是图1中机械臂的侧视图。
图8是图1中机械臂的俯视图。
图9是图1中树苗传输机构的结构示意图。
图10是图1中钻孔机构的结构示意图。
图11是图1中驱动装置的结构示意图。
图12是图1中灌溉装置的结构示意图。
图13是图1中培土装置的结构示意图。
图中:底盘1、驱动装置2、支撑架21、一号驱动电机22、二号驱动电机221、履带轮组23、钻孔机构3、驱动活塞31、钻机支架32、钻机33、钻头34、树苗传输机构4、树苗传输电机41、主动轮42、从动轮43、固定滑道44、内环形侧壁441、外环形侧壁442、环形底板443、内延环444、树苗固定架45、十字形支架451、连接轴46、限位板47、树苗固定叉48、机械臂5、机械臂旋转底座51、第一舵机52、第一连杆53、第二舵机54、第二连杆55、第三舵机56、第四舵机57、夹持机构58、转盘59、灌溉装置6、水箱61、水泵62、灌溉管63、出水口64、培土装置7、培土舵机71、一号培土舵机711、二号培土舵机712、主动杆72、被动杆73、填土杆74、舵机固定支架75、弧形培土板76、供电机构8、控制系统9、树苗10、视频监测装置11。
具体实施方式
以下结合附图说明和具体实施方式对本发明作进一步详细的说明。
参见图1至图6,一种新能源全自动植树机,所述新能源全自动植树机包括:底盘1、驱动装置2、钻孔机构3、树苗传输机构4、机械臂5、灌溉装置6、培土装置7与供电机构8,所述底盘1的底部固定设置有驱动装置2,所述底盘1顶部的中轴线上由车头方向到车尾方向依次固定设置有钻孔机构3、树苗传输机构4、机械臂5、灌溉装置6、培土装置7;所述钻孔机构3的底部设置有钻机33,该钻机33的行程为沿竖直方向上下移动,所述钻机33的底端与钻头34的顶端相连接,钻头34的底端向下延伸,所述树苗传输机构4内设置有多根树苗10,所述机械臂5为带有夹持机构58的机械臂,所述夹持机构58与树苗10的侧围进行夹持配合,所述灌溉装置6的出水口64高于地面设置,所述培土装置7的作用范围与地面相接触或高于地面,所述钻头34对地面的作用位置位于底盘1的行进路径上,所述出水口64的覆盖范围大于钻头34对地面的作用位置,所述培土装置7的作用范围大于钻头34对地面的作用位置,且出水口64的覆盖范围、培土装置7的作用范围都位于底盘1的行进路径上。
所述树苗传输机构4包括树苗传输电机41、主动轮42、从动轮43、固定滑道44与树苗固定架45,所述树苗传输电机41的壳体固定设置于底盘1的顶部,所述树苗传输电机41的动力输出轴沿竖直方向向上设置,所述树苗传输电机41的动力输出轴上固定设置有主动轮42,所述主动轮42为不完全齿轮,所述树苗传输电机41的壳体上沿水平方向固定设置有固定滑道44,所述固定滑道44为开口向上设置的环形滑道,所述固定滑道44的开口内设置有树苗10,所述固定滑道44与树苗10的底部滑动配合,所述树苗固定架45为圆形结构,所述树苗固定架45旋转中心的底部固定设置有连接轴46,所述连接轴46的底部通过从动轮43与主动轮42啮合,所述树苗固定架45外圆周的底部均布有多个向下延伸的限位板47,限位板47的底端与固定滑道44底部内延而成的内延环444的顶部相连接,所述树苗固定架45的直径与固定滑道44的内径相同,所述树苗固定架45的外圆周上均布有多个树苗固定叉48,所有树苗固定叉48都设置于固定滑道44的正上方,所述树苗固定叉48与树苗10限位配合。
所述钻孔机构3包括驱动活塞31、钻机支架32与钻机33,所述驱动活塞31的活塞座沿竖直方向固定设置于底盘1的车头侧的顶部,所述驱动活塞31的活塞杆的端部与钻机支架32的一端固定连接,所述钻机支架32的另一端与钻机33的壳体固定连接。
所述驱动装置2包括支撑架21、一号驱动电机22、二号驱动电机221与两组履带轮组23,所述支撑架21为框式支架,所述支撑架21一侧的内壁上固定设置有一号驱动电机22,所述支撑架21另一侧的内壁上固定设置有二号驱动电机221,所述支撑架21两侧的外壁各固定设置有一组履带轮组23,所述一号驱动电机22与二号驱动电机221分别与其对应侧的履带轮组23传动配合。
所述机械臂5包括机械臂旋转底座51、第一舵机52、第一连杆53、第二舵机54、第二连杆55、第三舵机56、第四舵机57与夹持机构58,所述机械臂旋转底座51的底部固定设置于底盘1的顶部,所述机械臂旋转底座51为动力输出轴竖直向上设置的旋转电机,所述旋转电机的动力输出轴竖直向上设置,所述旋转电机的动力输出轴上固定设置有转盘59,所述转盘59的顶部固定设置有第一舵机52,所述第一舵机52的动力输出轴平行于底盘1设置,所述第一舵机52的动力输出轴与第一连杆53的一端铰接,所述第一连杆53的另一端与第二舵机54的其中一个动力输出轴铰接,所述第二舵机54的另一个动力输出轴与第二连杆55的一端铰接,所述第二连杆55的另一端与第三舵机56的壳体固定连接,所述第三舵机56的动力输出轴与第二连杆55的一端固定连接,所述第二连杆55的另一端与第四舵机57铰接,所述第四舵机57的壳体上固定设置有夹持机构58,所述夹持机构58上带有两个相对设置的夹爪59,所述夹爪59上带有与树苗10相配合的凹陷,所述夹爪59上的凹陷内固定设置有压力传感器。
所述灌溉装置6包括水箱61、水泵62与灌溉管63,所述水箱61的底部固定设置于底盘1的顶部,所述水箱61内固定设置有水泵62,所述灌溉管63穿过水箱61车尾侧的侧壁后与水箱61的侧壁密封配合,所述灌溉管63的一端与水泵62相连通,所述灌溉管63的出水口64高于地面设置。
所述培土装置7包括培土舵机71、主动杆72、被动杆73与填土杆74,所述培土舵机71通过与其一体结构的舵机固定支架75固定设置于底盘1的车尾端,所述培土舵机71的动力输出轴与主动杆72的一端固定连接,所述主动杆72的另一端与填土杆74的中部铰接,所述填土杆74近底盘1外侧的一端与被动杆73的端部铰接,所述填土杆74近底盘1中心的一端固定设置有弧形培土板76,所述弧形培土板76的开口方向正对底盘1中心方向设置,被动杆73的另一端与舵机固定支架75铰接,所述舵机固定支架75、动杆72、被动杆73与填土杆74相互铰接形成平行四边形连杆结构,所述底盘1上设置的两个培土装置7中的弧形培土板76相对设置,所述底盘1一侧的培土舵机71为一号培土舵机711,所述底盘1另一侧的培土舵机71为二号培土舵机712。
所述供电机构8的数量为两个,两个供电机构8对称设置于底盘1的两侧,所述供电机构8为带有蓄电池的太阳能电池板。
所述固定滑道44包括内环形侧壁441、外环形侧壁442与环形底板443,内环形侧壁441与外环形侧壁442的旋转中心相重合,内环形侧壁441与外环形侧壁442的底部通过环形底板443相连接,所述环形底板443与内环形侧壁441的连接处向圆心方向内延形成内延环444,所述环形底板443与树苗10的底端限位配合,所述树苗10插入内环形侧壁441、外环形侧壁442与环形底板443形成的环形槽后与环形槽滑动配合,所述树苗固定架45为环形结构,所述树苗固定架45的中部固定设置有十字形支架451,所述十字形支架451的四个端部与环形结构的内壁固定连接,所述十字形支架451中心位置的底部固定设置有连接轴46,所述树苗固定架45的外侧壁上均布有多个树苗固定叉48,所述树苗固定叉48包括两根叉齿,所述树苗10插入两根叉齿之间后与叉齿限位配合。
所述第一连杆53包括两个门型框架,所述门型框架的左、右侧壁通过横板互相连接,两个门型框架上的横板互相连接为一体结构,其中一个门型框架的左、右侧壁之间设置有第一舵机52,另一个门型框架的左、右侧壁之间设置有第二舵机54,所述门型框架的左、右侧壁与其对应的舵机的动力输出轴固定连接。
本发明的原理说明如下:
本设计在运输树苗时,采用不完全齿轮间歇传动,当树苗传输电机41旋转时带动主动轮42旋转,主动轮42为不完全齿轮,其外圆周上仅布置有部分轮齿,其具有轮齿的长度与整个圆周长度的比例与树苗固定架45上树苗固定叉48的数量相对应,当主动轮42旋转直到其上的轮齿与从动轮43上的轮齿啮合时,主动轮42带动从动轮43开始旋转,此时树苗固定架45进行旋转,当主动轮42上的轮齿脱离从动轮43时,树苗固定架45停止旋转,此过程中树苗固定架45旋转角度正好等于两个树苗固定叉48的夹角;
本设计中夹爪59上的压力传感器与树苗10的侧壁相接触,当夹爪59开始工作时,压力传感器持续监测其收到的压力,以确定夹爪59是否夹持住树苗10;
本设计还可以增加视频监测装置,视频监测装置的摄像头正对两个弧形培土板76设置,视频监测装置拍摄的视频通过控制器发送给操作者,以便操作者实时观察植树作业情况。
实施例1:
一种新能源全自动植树机,所述新能源全自动植树机包括:底盘1、驱动装置2、钻孔机构3、树苗传输机构4、机械臂5、灌溉装置6、培土装置7与供电机构8,所述底盘1的底部固定设置有驱动装置2,所述底盘1顶部的中轴线上由车头方向到车尾方向依次固定设置有钻孔机构3、树苗传输机构4、机械臂5、灌溉装置6、培土装置7;所述钻孔机构3的底部设置有钻机33,该钻机33的行程为沿竖直方向上下移动,所述钻机33的底端与钻头34的顶端相连接,钻头34的底端向下延伸,所述树苗传输机构4内设置有多根树苗10,所述机械臂5为带有夹持机构58的机械臂,所述夹持机构58与树苗10的侧围进行夹持配合,所述灌溉装置6的出水口64高于地面设置,所述培土装置7的作用范围与地面相接触或高于地面,所述钻头34对地面的作用位置位于底盘1的行进路径上,所述出水口64的覆盖范围大于钻头34对地面的作用位置,所述培土装置7的作用范围大于钻头34对地面的作用位置,且出水口64的覆盖范围、培土装置7的作用范围都位于底盘1的行进路径上;所述树苗传输机构4包括树苗传输电机41、主动轮42、从动轮43、固定滑道44与树苗固定架45,所述树苗传输电机41的壳体固定设置于底盘1的顶部,所述树苗传输电机41的动力输出轴沿竖直方向向上设置,所述树苗传输电机41的动力输出轴上固定设置有主动轮42,所述主动轮42为不完全齿轮,所述树苗传输电机41的壳体上沿水平方向固定设置有固定滑道44,所述固定滑道44为开口向上设置的环形滑道,所述固定滑道44的开口内设置有树苗10,所述固定滑道44与树苗10的底部滑动配合,所述树苗固定架45为圆形结构,所述树苗固定架45旋转中心的底部固定设置有连接轴46,所述连接轴46的底部通过从动轮43与主动轮42啮合,所述树苗固定架45外圆周的底部均布有多个向下延伸的限位板47,限位板47的底端与固定滑道44底部内延而成的内延环444的顶部相连接,所述树苗固定架45的直径与固定滑道44的内径相同,所述树苗固定架45的外圆周上均布有多个树苗固定叉48,所有树苗固定叉48都设置于固定滑道44的正上方,所述树苗固定叉48与树苗10限位配合;所述钻孔机构3包括驱动活塞31、钻机支架32与钻机33,所述驱动活塞31的活塞座沿竖直方向固定设置于底盘1的车头侧的顶部,所述驱动活塞31的活塞杆的端部与钻机支架32的一端固定连接,所述钻机支架32的另一端与钻机33的壳体固定连接;所述驱动装置2包括支撑架21、一号驱动电机22、二号驱动电机221与两组履带轮组23,所述支撑架21为框式支架,所述支撑架21一侧的内壁上固定设置有一号驱动电机22,所述支撑架21另一侧的内壁上固定设置有二号驱动电机221,所述支撑架21两侧的外壁各固定设置有一组履带轮组23,所述一号驱动电机22与二号驱动电机221分别与其对应侧的履带轮组23传动配合;所述机械臂5包括机械臂旋转底座51、第一舵机52、第一连杆53、第二舵机54、第二连杆55、第三舵机56、第四舵机57与夹持机构58,所述机械臂旋转底座51的底部固定设置于底盘1的顶部,所述机械臂旋转底座51为动力输出轴竖直向上设置的旋转电机,所述旋转电机的动力输出轴竖直向上设置,所述旋转电机的动力输出轴上固定设置有转盘59,所述转盘59的顶部固定设置有第一舵机52,所述第一舵机52的动力输出轴平行于底盘1设置,所述第一舵机52的动力输出轴与第一连杆53的一端铰接,所述第一连杆53的另一端与第二舵机54的其中一个动力输出轴铰接,所述第二舵机54的另一个动力输出轴与第二连杆55的一端铰接,所述第二连杆55的另一端与第三舵机56的壳体固定连接,所述第三舵机56的动力输出轴与第二连杆55的一端固定连接,所述第二连杆55的另一端与第四舵机57铰接,所述第四舵机57的壳体上固定设置有夹持机构58,所述夹持机构58上带有两个相对设置的夹爪59,所述夹爪59上带有与树苗10相配合的凹陷,所述夹爪59上的凹陷内固定设置有压力传感器;所述灌溉装置6包括水箱61、水泵62与灌溉管63,所述水箱61的底部固定设置于底盘1的顶部,所述水箱61内固定设置有水泵62,所述灌溉管63穿过水箱61车尾侧的侧壁后与水箱61的侧壁密封配合,所述灌溉管63的一端与水泵62相连通,所述灌溉管63的出水口64高于地面设置;所述底盘1的车尾端固定设置有两个相互对称的培土装置7,所述培土装置7包括培土舵机71、主动杆72、被动杆73与填土杆74,所述培土舵机71通过与其一体结构的舵机固定支架75固定设置于底盘1的车尾端,所述培土舵机71的动力输出轴与主动杆72的一端固定连接,所述主动杆72的另一端与填土杆74的中部铰接,所述填土杆74近底盘1外侧的一端与被动杆73的端部铰接,所述填土杆74近底盘1中心的一端固定设置有弧形培土板76,所述弧形培土板76的开口方向正对底盘1中心方向设置,被动杆73的另一端与舵机固定支架75铰接,所述舵机固定支架75、动杆72、被动杆73与填土杆74相互铰接形成平行四边形连杆结构,所述底盘1上设置的两个培土装置7中的弧形培土板76相对设置,所述底盘1一侧的培土舵机71为一号培土舵机711,所述底盘1另一侧的培土舵机71为二号培土舵机712;所述供电机构8的数量为两个,两个供电机构8对称设置于底盘1的两侧,所述供电机构8为带有蓄电池的太阳能电池板;所述固定滑道44包括内环形侧壁441、外环形侧壁442与环形底板443,内环形侧壁441与外环形侧壁442的旋转中心相重合,内环形侧壁441与外环形侧壁442的底部通过环形底板443相连接,所述环形底板443与内环形侧壁441的连接处向圆心方向内延形成内延环444,所述环形底板443与树苗10的底端限位配合,所述树苗10插入内环形侧壁441、外环形侧壁442与环形底板443形成的环形槽后与环形槽滑动配合,所述树苗固定架45为环形结构,所述树苗固定架45的中部固定设置有十字形支架451,所述十字形支架451的四个端部与环形结构的内壁固定连接,所述十字形支架451中心位置的底部固定设置有连接轴46,所述树苗固定架45的外侧壁上均布有多个树苗固定叉48,所述树苗固定叉48包括两根叉齿,所述树苗10插入两根叉齿之间后与叉齿限位配合;所述第一连杆53包括两个门型框架,所述门型框架的左、右侧壁通过横板互相连接,两个门型框架上的横板互相连接为一体结构,其中一个门型框架的左、右侧壁之间设置有第一舵机52,另一个门型框架的左、右侧壁之间设置有第二舵机54,所述门型框架的左、右侧壁与其对应的舵机的动力输出轴固定连接。
实施例2:
与实施例1基本相同,其不同之处在于:
所述压力传感器的触点与树苗10的侧壁相接触,所述主动轮42上有齿部分长度为从动轮43的周长除以树苗固定架45上设置的树苗固定叉48数量的值。
实施例3:
与实施例2基本相同,其不同之处在于:
所述植树机还包括视频监测装置11,所述视频监测装置11里的摄像头正对两个弧形培土板76设置,且视频监测装置11安装在机械臂5上。
实施例4:
与实施例2基本相同,其不同之处在于:
所述植树机还包括控制系统9,所述控制系统9为带有无线接收器的控制器,所述控制系统9与一号驱动电机22、二号驱动电机221、驱动活塞31、钻机33、树苗传输电机41、机械臂底座51、第一舵机52、第二舵机54、第三舵机55、第四舵机57、夹持机构58、水泵62、一号培土舵机711、二号培土舵机712相连接。
- 一种全自动压饼机及应用该全自动压饼机的轴加工工艺
- 一种新能源全自动仓库机器人
- 一种生物质新能源全自动智能化多面观火取暖炉
- 一种全自动植树机及植树方法
- 一种全自动植树机及植树方法