一种传统鞋楦智能化改造应用的定位工装及方法
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及鞋楦加工设备技术领域,特别涉及一种传统鞋楦智能化改造应用的定位工装及方法。
背景技术
鞋楦是一种常见的制鞋用具,鞋楦外形仿造人体脚部形状,其在制鞋生产中起到对鞋面形状的填充固定。
随着制鞋产业智能化产线的兴起以及工业机器人在制鞋自动化产线的应用,需要大量适配于智能化生产的自动化鞋楦,自动化鞋楦与传统鞋楦的区别在于:自动化鞋楦在其顶面设有一定位块,自动化鞋楦通过定位块与机械臂等设备装备连接。为了保证程序的可靠运行,需要保证每个同款鞋楦的外形及定位块一致,通常自动化鞋楦采用机加工生产,鞋楦主体与定位块在同一加工工序中生产。
传统制鞋企业进行智能化升级改造项目中,传统产线上原有大量普通的传统鞋楦,传统鞋楦没有定位块,因此无法直接在智能产线上应用,需要对其进行改造,改造方式通常为在传统鞋楦上端加装定位块。
改造过程中存在下述难点:安装定位块则需要在鞋楦上加工出参考平面及定位孔,但鞋楦为不规则形状且大部分位置为不规则曲面,采用数控加工中心进行加工存在定位困难,对于同一形状及尺码的一批传统鞋楦的改造,需要做到对每个鞋楦加工的位置保持一致。但现有的夹持设备及方法难以做到每次都将鞋楦夹持于同样的位置,即导致最后加工出的各鞋楦的参考平面及定位孔误差较大,影响鞋楦与机械臂的装配精度,最终影响后续智能化生产的产品质量。
发明内容
为克服现有技术中的不足,本发明提供一种保证鞋楦加工精度的传统鞋楦智能化改造应用的定位工装及方法。
为实现上述目的,本发明采用的技术方案如下:一种传统鞋楦智能化改造应用的定位工装,用于定位鞋楦,其特征在于:包括底板,所述底板上形成有鞋楦固定位,所述鞋楦固定位的前后两侧分别设有前压紧组件、后固定挡板,所述鞋楦固定位的左右两侧分别设有侧向定位机构、侧向压紧机构;
所述前压紧组件包括第一弹性推杆、前挡板,所述前挡板安装于第一弹性推杆上,且第一弹性推杆具有一将前挡板朝后固定板方向推出的弹力;
所述侧向定位机构包括固定横向挡条、若干横向定位组件,所述固定横向挡条朝向鞋楦固定位方向并沿前后方向延伸,所述横向定位组件设于固定横向挡条下方,横向定位组件朝向鞋楦固定位的一端设有一顶紧端头,横向定位组件用于调整及定位其上设置的顶紧端头的左右位置;
所述侧向压紧机构包括活动横向挡条、锁止机构、侧压紧组件,所述活动横向挡条朝向并对应固定横向挡条,活动横向挡条沿前后方向延伸,活动横向挡条安装于锁止机构上,所述锁止机构用于调整及定位活动横向挡条的左右位置,所述侧压紧组件设于活动横向挡条下方,所述侧压紧组件包括第二弹性推杆,所述第二弹性推杆端部设有一顶紧端头,第二弹性推杆具有一将其上设置的顶紧端头朝向鞋楦固定位方向推出的弹力;
所述顶紧端头具有一朝向鞋楦固定位且竖向延伸的棱边。
进一步的,还包括底部定位机构,所述底部定位机构设于鞋楦固定位下方,底部定位机构包括纵向定位组件、支撑条,所述支撑条设于纵向定位组件上方并由纵向调整组件调整及定位高度位置,所述支撑条沿左右方向横向延伸且其上端具有横向延伸的棱边。
进一步的,所述底板上设有两组鞋楦固定位,所述锁止机构包括滑座、滑块、偏心轮、复位弹簧,所述滑座设于两组鞋楦固定位之间,所述滑块设有两组且分别安装于滑座两端,两组滑块朝外一端分别设有一活动横向挡条,所述偏心轮可转动安装于滑座上且位于两组滑块之间,通过偏心轮转动同步推动两组滑块朝两侧移动,所述复位弹簧连接两组滑块,复位弹簧具有一拉动两组滑块相互靠近的弹力。
进一步的,所述横向定位组件设有两组,两组横向定位组件沿前后方向间隔布置,所述侧压紧组件设有一组,侧压紧组件与两组横向定位组件呈前后方向的错位布置。
进一步的,所述横向定位组件包括导块、导杆、锁止螺栓,所述导杆可横向移动的设于导块内,所述锁止螺栓设于导块上并朝向导杆方向,通过锁止螺栓定位导块与导杆相对位置。
进一步的,还包括检测机构,所述检测机构包括控制电路板、第一电极线、若干第二电极线,所述第一电极线一端连接控制电路板,另一端用于连接鞋楦,所述第二电极一端连接控制电路板,各第二电极线的另一端分别连接至各顶紧端头,所述鞋楦为导电材质,所述顶紧端头为导电材质。
进一步的,所述第一电极线另一端设有磁吸块,所述鞋楦为导磁材料,第一电极线通过磁吸块吸附于鞋楦上。
进一步的,所述横向定位组件与顶紧端头之间设有绝缘连接,所述第二弹性推杆与顶紧端头之间绝缘连接。
一种传统鞋楦智能化改造应用方法,其特征在于:基于上述任意一项所述一种传统鞋楦智能化改造应用的定位工装,包括如下步骤:
S1.取待加工传统鞋楦置于鞋楦固定位内,鞋楦的后端抵住后固定挡板,前挡板位于鞋楦的前端,并在第一弹性推杆的作用下将鞋楦朝后压紧;
S2.鞋楦上部的脚踝一侧靠设于固定横向挡条上,调整各横向定位组件,使各横向定位组件上的顶紧端头移动至接触鞋楦一侧面,而后锁止横向定位组件,第二弹性推杆带动顶紧端头抵住鞋楦的另一侧面;
S3.锁止机构将活动横向挡条朝向固定横向挡条一侧推出,并使鞋楦的脚裸部被夹持于固定横向挡条与活动横向挡条之间,此时,鞋楦与后固定板、前挡板、各顶紧端头保持接触状态;
S5.将安装有鞋楦的定位工装至数控加工设备对鞋楦的顶面加工出参考平面,并在参考平面上加工出定位孔;
S6.锁止机构带动活动横向挡条反向移动解锁,取下鞋楦,该过程中保持横向定位组件位置不改变,对加工后的鞋楦的参考平面上对应定位孔安装定位块;
S7.将同一形状及尺码的下一个待加工传统鞋楦置入鞋楦固定位内,鞋楦的后端抵住后固定挡板,鞋楦上部的脚踝一侧靠设于固定横向挡条上,调整鞋楦位置,使鞋楦的一侧面与各横向定位组件上的顶紧端头接触,前挡板抵住鞋楦的前端,第二弹性推杆带动顶紧端头抵住鞋楦的另一侧面;
S8.锁止机构将活动横向挡条朝向固定横向挡条一侧推出,并使鞋楦的脚裸部被夹持于固定横向挡条与活动横向挡条之间;
S9.回到S5循环重复该加工工序。
由上述对本发明的描述可知,与现有技术相比,本发明提供的一种传统鞋楦智能化改造应用的定位工装及方法具有如下优点:
1、该定位工装实现了对鞋楦的精准固定,保证同一形状与尺码的传统鞋楦安装于定位工装的同一位置处,保证了后续鞋楦的加工精度及定位块的装配精度,实现了传统鞋楦的二次加工完成智能化应用改造,降低了企业智能化升级改造成本。
2、侧向定位机构、底部定位机构在对第一个鞋楦进行调整后将保持位置固定状态,为后续的鞋楦实现定位的作用;前压紧组件与侧压紧组件采用弹性推杆,便于鞋楦的拆装;锁止机构带动活动横向挡条与固定横向挡条夹紧鞋楦,保证鞋楦具备后续机加工正常进行。
3、设置检测机构通过第一电极线与第二电极线的导通状态判断鞋楦是否安装到位,减少人为安装时的失误的发生,进一步保证了鞋楦安装于定位工装内的安装精度。
附图说明
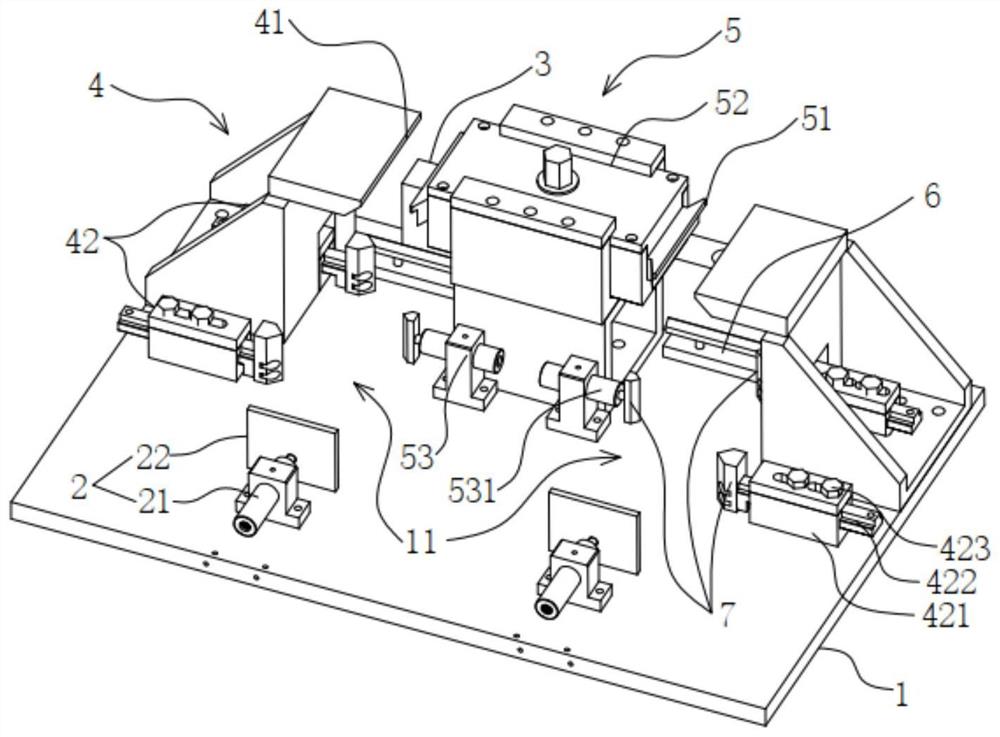
图1为本发明一种传统鞋楦智能化改造应用的定位工装结构示意图。
图2为本发明使用状态俯视剖面示意一。
图3为本发明使用状态俯视剖面示意二。
图4为本发明检测机构原理结构示意图。
图5为本发明传统鞋楦示意图。
图6为本发明智能化改造的鞋楦示意图。
图中标识对应如下:1.底板、11.鞋楦固定位、2.前压紧组件、21.第一弹性推杆、22.前挡板、3.后固定挡板、4.侧向定位机构、41.固定横向挡条、42.横向定位组件、421.导块、422.导杆、423.锁止螺栓、5.侧向压紧机构、51.活动横向挡条、52.锁止机构、521.滑座、522.滑块、523.偏心轮、524.复位弹簧、53.侧压紧组件、531.第二弹性推杆、6.底部定位机构、61.纵向定位组件、62.支撑条、7.顶紧端头、8.检测机构、81.控制电路板、82.第一电极线、821.磁吸块、83.第二电极线。
具体实施方式
以下通过具体实施方式对本发明作进一步的描述。
参照图1至图4所示,一种传统鞋楦智能化改造应用的定位工装,用于定位鞋楦,包括底板1,所述底板1上形成有鞋楦固定位11,所述鞋楦固定位11的前后两侧分别设有前压紧组件2、后固定挡板3,所述鞋楦固定位11的左右两侧分别设有侧向定位机构4、侧向压紧机构5,所述鞋楦固定位11的下方设有底部定位机构6;
所述前压紧组件2包括第一弹性推杆21、前挡板22,所述前挡板22安装于第一弹性推杆21上,且第一弹性推杆21具有一将前挡板22朝后固定板3方向推出的弹力;
所述侧向定位机构4包括固定横向挡条41、若干横向定位组件42,所述固定横向挡条41朝向鞋楦固定位11方向并沿前后方向延伸,所述横向定位组件42设于固定横向挡条41下方,横向定位组件42朝向鞋楦固定位11的一端设有一顶紧端头7,横向定位组件42用于调整及定位其上设置的顶紧端头7的左右位置;所述横向定位组件42设有两组,两组横向定位组件42沿前后方向间隔布置,所述横向定位组件42包括导块421、导杆422、锁止螺栓423,所述导杆422可横向移动的设于导块421内,所述锁止螺栓423设于导块上并朝向导杆422方向,通过锁止螺栓423定位导块422与导杆421相对位置。
所述侧向压紧机构5包括活动横向挡条51、锁止机构52、侧压紧组件53,所述活动横向挡条51朝向并对应固定横向挡条41,活动横向挡条51沿前后方向延伸,活动横向挡条51安装于锁止机构52上,所述锁止机构52用于调整及定位活动横向挡条51的左右位置,所述侧压紧组件53设于活动横向挡条51下方,所述侧压紧组件53包括第二弹性推杆531,所述第二弹性推杆531端部设有一顶紧端头7,第二弹性推杆531具有一将其上设置的顶紧端头7朝向鞋楦固定位11方向推出的弹力;所述侧压紧组件53设有一组,侧压紧组件53与两组横向定位组件42呈前后方向的错位布置。
所述顶紧端头7具有一朝向鞋楦固定位且竖向延伸的棱边。
所述底部定位机构6设于鞋楦固定位11下方,底部定位机构6包括纵向定位组件61、支撑条62,所述支撑条62设于纵向定位组件61上方并由纵向调整组件61调整及定位高度位置,所述支撑条62沿左右方向横向延伸且其上端具有横向延伸的棱边。
所述底板1上设有两组鞋楦固定位11,所述锁止机构52包括滑座521、滑块522、偏心轮523、复位弹簧524,所述滑座521设于两组鞋楦固定位11之间,所述滑块522设有两组且分别安装于滑座521两端,两组滑块522朝外一端分别设有一活动横向挡条51,所述偏心轮523可转动安装于滑座521上且位于两组滑块522之间,通过偏心轮523转动同步推动两组滑块522朝两侧移动,所述复位弹簧524连接两组滑块522,复位弹簧524具有一拉动两组滑块522相互靠近的弹力。
还包括检测机构8,所述检测机构8包括控制电路板81、第一电极线82、若干第二电极线83,所述第一电极线82一端连接控制电路板81,另一端用于连接鞋楦,所述第二电极83一端连接控制电路板81,各第二电极线83的另一端分别连接至各顶紧端头7、支撑条62,所述鞋楦为导电材质,所述顶紧端头7为导电材质。所述第一电极线82另一端设有磁吸块821,所述鞋楦为导磁材料,第一电极线82通过磁吸块821吸附于鞋楦上。所述横向定位组件42与顶紧端头7之间绝缘连接,所述第二弹性推杆531与顶紧端头7之间绝缘连接,支撑条62为导电材质,纵向定位组件61与支撑条62之间绝缘连接。
一种传统鞋楦智能化改造应用方法,包括如下步骤:
S1.一底板上具有两个鞋楦固定位11,分别对应左脚鞋楦和右脚鞋楦,可一次安装一对鞋楦同时进行加工;取待加工传统鞋楦置于鞋楦固定位11内,鞋楦的底部的前部置于底板1上,后部置于底部定位机构6的支撑条62上,鞋楦的后端抵住后固定挡板3,前挡板22位于鞋楦的前端,并在第一弹性推杆21的作用下将鞋楦朝后压紧,调整纵向定位组件61使鞋楦上端面处于接近水平面的状态后锁止纵向定位组件61。
S2.鞋楦上部的脚踝一侧靠设于固定横向挡条41上,调整各横向定位组件42,使各横向定位组件42上的顶紧端头7移动至接触鞋楦一侧面,而后锁止横向定位组件7,第二弹性推杆531带动顶紧端头7抵住鞋楦的另一侧面;取第一电极线82的磁吸块821吸附于鞋楦上,若此时检测机构8识别到第一电极线82与各第二电极线83均呈导通状态,则代表该步骤S2调整准确,若存在未导通的第二电极线83,则重新进行步骤S2调整。
S3.将锁止机构52的偏心轮523进行转动,偏心轮523将推动两侧滑块522分别朝外移动出,即带动两活动横向挡条51分别朝向两组鞋楦固定位11的固定横向挡条41推出,一次动作完成两个鞋楦的固定。鞋楦的脚裸部被夹持于固定横向挡条41与活动横向挡条51之间,该夹持目的在于提供一较大的夹持力,保证后续加工时鞋楦位置固定,此时需要保证检测机构8识别到第一电极线82与各第二电极线83均呈导通状态,即鞋楦与各顶紧端头7、支撑条62保持接触状态,若检测机构8识别到存在未导通的第二电极线83,则代表发生了鞋楦位置偏移,需重新进行S3动作或回到S2进行重新调整。
S5.将安装有鞋楦的定位工装至数控加工设备对鞋楦的顶面加工出参考平面,并在参考平面上加工出定位孔。
S6.将锁止机构52的偏心轮523进行反向转动,复位弹簧524拉动两滑块522靠近移动以带动活动横向挡条51反向移动解锁,取下鞋楦,取下第一电极线82的磁吸块821,该过程中保持横向定位组件42位置、纵向定位组件61位置不改变,对加工后的鞋楦的参考平面上对应定位孔安装定位块,即完成一组传统鞋楦的智能化改造。
S7.将同一形状及尺码的下一个待加工传统鞋楦置入鞋楦固定位11内,第一电极线82的磁吸块821吸附于鞋楦上,鞋楦的底部的前部置于底板1上,后部置于底部定位机构6的支撑条62上,鞋楦的后端抵住后固定挡板3,鞋楦上部的脚踝一侧靠设于固定横向挡条71上,第一弹性推杆21带动前挡板22抵住鞋楦的前端,第二弹性推杆531带动顶紧端头7抵住鞋楦的一侧面,调整鞋楦位置,使鞋楦的另一侧面与各横向定位组件42上的顶紧端头7接触,即使得检测机构8识别到第一电极线82与各第二电极线83均呈导通状态。
S8.将锁止机构52的偏心轮523进行转动,偏心轮523将推动两侧滑块522分别朝外移动出,使活动横向挡条51朝向固定横向挡条41一侧推出,并使鞋楦的脚裸部被夹持于固定横向挡条41与活动横向挡条51之间,此时需要保证检测机构8识别到第一电极线82与各第二电极线83均呈导通状态,即鞋楦与各顶紧端头7、支撑条62保持接触状态,若检测机构8识别到存在未导通的第二电极线83,则代表发生了鞋楦位置偏移,需重新进行S8动作;
S9.回到S5循环重复该加工工序。
上述仅为本发明的一种具体实施方式,但本发明的设计构思并不局限于此,凡利用此构思对本发明进行非实质性的改动,均应属于侵犯本发明保护范围的行为。
- 一种铰接油缸定位支撑工装和定位支撑方法
- 一种光伏组件叠层定位方法、工装和结构
- 一种数控定位装夹工装及装夹方法
- 鞋帮喷胶装置的鞋楦定位工装和鞋楦定位工装使用方法
- 一种传统变电站断路器智能化改造方法