一种无人化农场智能农机安全作业机路协同方法
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及智能农业领域,具体涉及一种无人化农场智能农机安全作业机路协同方法。
背景技术
随着农机自动导航技术的推广,越来越多的农机操作手从长时间的驾驶中解放出来,同时有效地提高作业精度和作业效率。与此同时,农机自动导航的安全性问题也变得愈发重要。其中障碍物探测及主动避障技术是农机自动导航系统要解决的一个重要问题。障碍物检测与主动避障的主要任务是在一个外部环境未知的情况下,通过传感器获取周围环境信息,按照一定的方法对障碍物进行有效的绕行,智能农机自主地完成从起始点到目标点的路径规划。
目前,智能农机的避障路径规划方式是根据农机和障碍物的位置信息,生成局部的避障路径,该路径规划方式容易陷入局部最优。
智能农机的障碍物检测模式大多数是在作业农机上安装传感器获取障碍物的信息,通过车载处理器对障碍物进行分类以及定位处理。该障碍物检测模式存在智能农机的作业安全依赖于农机避障系统的好坏、农机生产成本高,障碍物识别能力有限、功能单一等问题。
车路协同的道路监测方式采用先进的无线通信和新一代互联网技术,全方位实施车车、车路动态实时信息交互,并在全时空动态交通信息采集与融合基础上的车辆主动安全控制和道路协同管理。该方法能够全局地规划避障路径和有效地降低智能农机障碍物检测的成本。
发明内容
针对现有技术中存在的技术问题,本发明提供了一种无人化农场智能农机安全作业机路协同方法。本发明通过在重要作业区域安装监测设备,使用深度学习和多传感器融合的方法对识别目标进行识别和定位,并将识别目标进行追踪和分类。在智能农机作业过程中,根据识别结果进行智能农机的监管、作业路径的规划以及作业道路的管控,实现低成本的保证农场以及野外农田的农机作业安全。
为了达到上述目的,本发明采用如下技术方案:
一种无人化农场智能农机安全作业机路协同方法,包括如下步骤:S1.划定无人农场重要作业区域,安装和标定信息监测设备;S2.深度学习和多传感器融合方法对目标对象进行识别与定位;S3.追踪算法对目标对象进行追踪;S4.算法将识别目标进行动态目标对象、静态目标对象以及作业智能农机分类;S5.农机作业前,根据目标对象在不同道路上的分布情况,计算得到智能农机最优作业路线,警示路线中动态目标对象离开以及封闭作业路线;S6.智能农机作业过程中,监测智能农机的实际位置与规划路径的偏差,进行安全监管和危险预测;S7.作业农机通行后,解除区域封闭。
作为一种优选,步骤S1中,将点云传感器与视觉传感器作为信息监控设备的传感设备,安装在已知位置并进行标定和定位。
作为一种优选,步骤S2中,信息监控设备的视觉传感器获取到的图像信息输入到目标检测网络中进行检测,将感兴趣目标的像素坐标转到点云传感器的坐标系中,根据目标种类的不同在点云坐标系中生成敏感区域,将敏感区域中的点云信息进行聚类,聚类信息结果作为感兴趣目标的真实位置。
作为一种优选,步骤S3中,通过卡尔曼滤波器对感兴趣目标进行位置预测,使用匈牙利算法将预测数据与当前帧检测到的目标进行关联。
作为一种优选,步骤S3具体为:
将感兴趣目标的状态和运动信息定义为8维的状态向量[x,y,γ,h,v
式中,d
作为一种优选,步骤S4中,融合设备检测到目标对象k记录下t
作为一种优选,步骤S5中,各段道路判断是否存在静态目标对象阻碍智能农机作业,在无静态目标对象阻碍智能农机作业的道路段中,选出最优作业路径。
作为一种优选,步骤S6中,实时检测智能农机与规划路径的偏差,根据不同偏差值对智能农机进行不同的管控措施。
作为一种优选,步骤S6中,管控措施为:当智能农机偏离作业路径,但未超出作业道路时,给智能农机下发偏差预警信号;当智能农机偏离作业路径,且准备超出作业道路时,获取智能农机的实时作业参数,根据智能农机的实时作业参数以及作业道路的信息,重新规划路径,下发给智能农机;当智能农机偏离作业路径,且超出作业道路时,给智能农机下紧急停车指令;当有突发的动态障碍物进入到智能农机的前方时,给智能农机下紧急停车指令。
作为一种优选,步骤S5中,封闭措施包括采用电动栏杆、电动闸门;警示措施包括采用红绿灯、电子显示屏、警报铃。
本发明具有如下优点:
1.低成本的保证农场以及野外农田的农机作业安全。
2.提供了一种农场与智能农机的车道协同方法,提高了智能农机的作业效率。
3.通过深度学习与多传感器融合的方法,使得系统的检测效果具有更好的鲁棒性和稳定性。
附图说明
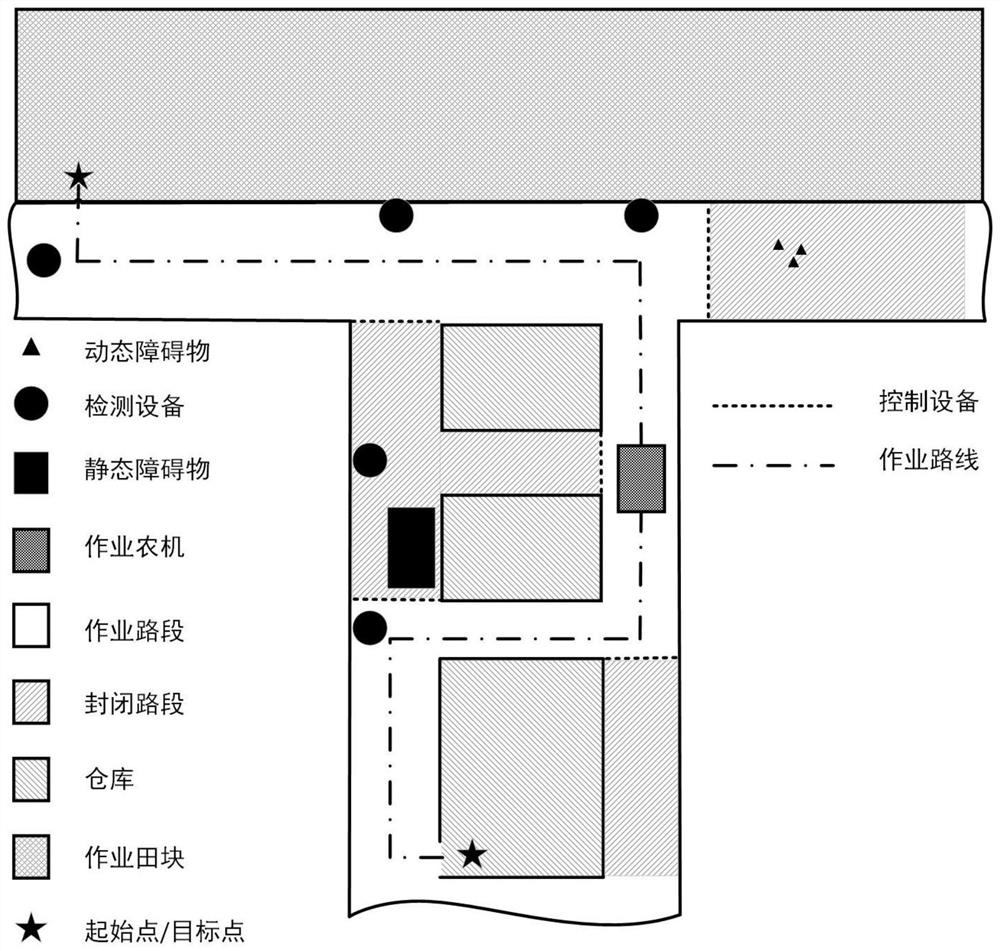
图1是一种无人化农场智能农机安全作业机路协同方法的应用场景图。
图2是一种无人化农场智能农机安全作业机路协同方法的流程图。
图3是检测点在农场中的分布示意图。
图4是检测点的结构示意图。
图5是4D毫米波雷达与视觉传感器的数据进行融合的流程图。
图6是最优作业路径选择的示意图。
图7是智能农机与道路协同的流程图。
具体实施方式
下面将结合具体实施方式来对本发明做进一步详细的说明。
图1所示,本实施例的一种无人化农场智能农机安全作业机路协同方法,具体如下:
S1、划定无人农场重要作业区域,安装和标定信息监测设备。
如图3和4所示本实施例将点云传感器与视觉传感器作为传感设备,安装在已知位置并进行标定和定位。监测点在农场的布局如图1所示,保证道路的每一个路口处至少存在一个监测点对道路信息进行监测。
S2、深度学习和多传感器融合方法对目标对象进行识别与定位。
视觉上,从农场和网络上获取识别目标的图像信息,并将目标图像进行标注,将标注后的图像输入YOLOv5网络进行训练。训练后得到的权重文件经过tensorRT修剪后,加载到jetsonTx2中,实时地输出识别目标的类别、像素坐标以及置信度。
识别目标类别为汽车、大型拖拉机、水田拖拉机、自行车、摩托车、行人、牛、狗。
点云传感器上,使用4D毫米雷达获取无识别目标的道路的点云信息并保存为CFG文件,通过实时的点云信息与CFG文件的点云信息比对,判断道路是否存在识别目标。若存在识别目标,使用GTRACK算法进行识别目标的追踪,并输出识别目标的信息,其中包括三维坐标信息和速度。
视觉传感器(相机)获取到的图像信息输入到YOLOv5网络中进行目标检测,将感兴趣目标的像素坐标转到点云传感器的坐标系中,根据目标种类的不同在点云坐标系中生成敏感区域,将敏感区域中的点云信息进行聚类,聚类信息结果作为感兴趣目标的真实位置。
S3.追踪算法对目标对象进行追踪。
将感兴趣目标的状态和运动信息定义为8维的状态向量[x,y,γ,h,v
式中,d
S4.算法将识别目标进行动态目标对象、静态目标对象以及作业智能农机分类。
目标对象分类依据为:将目标对象分为静态目标对象和动态目标对象两大类,其中动态目标对象包括牛、狗、行人以及移动的汽车、大型拖拉机、水田拖拉机、自行车、摩托车。移动的判定依据为:融合设备检测到目标对象k记录下t
S5.农机作业前,根据目标对象在不同道路上的分布情况,计算得到智能农机最优作业路线,警示路线中动态目标对象离开以及封闭作业路线。
如图6所示,分别检测道路W
S6、智能农机作业过程中,监测智能农机的实际位置与规划路径的偏差,进行安全监管和危险预测。
如图6所示,实时检测智能农机与规划路径的偏差,根据不同偏差值对智能农机进行不同的管控措施。情况①当智能农机偏离作业路径,但未超出作业道路时,给智能农机下发偏差预警信号;情况②当智能农机偏离作业路径,且准备超出作业道路时,获取智能农机的实时作业参数,根据智能农机的实时作业参数以及作业道路的信息,重新规划路径,下发给智能农机;情况③当智能农机偏离作业路径,且超出作业道路时,给智能农机下紧急停车指令;情况④当有突发的动态障碍物进入到智能农机的前方时,给智能农机下紧急停车指令。S7、作业农机通行后,解除区域封闭。
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
- 一种基于智能手机的农机协同作业方法
- 一种农机多机协同作业路径规划方法