用于天然气水合物连续管钻井的蠕动推进装置
文献发布时间:2023-06-19 19:07:35
技术领域
本发明涉及石油钻井领域,具体地涉及一种用于天然气水合物连续管钻井的蠕动推进装置。
背景技术
天然气水合物的储量巨大。据不完全统计,天然气水合物的储量是传统油气资源储量的两倍以上,有可能成为未来主要的可替代能源。
世界上超过90%的天然气水合物资源都分布于大陆架海底,在地层中的赋存状态主要有孔隙充填状、块状、脉状等。天然气水合物埋藏一般较浅,永久冻土带水合物埋深一般在几百米范围内,而海域天然气水合物一般位于海底以下几百米范围内。
常规的深水钻井一般需要在海底钻进几千米,多使用大型深水半潜式钻井平台、大型深水钻井船等装备。如果将其应用于天然气水合物的钻井作业中,将造成巨大浪费。而连续管钻井技术可保证储层钻遇率、增大储层泄油面积、提高开发效率,且复合连续管钻机重量轻、占地面积小,钻深能力(可达3000m)足以满足海域天然气水合物钻井作业需求。因此,连续管钻井技术的相关设备可以直接安装于中小型钻井船或修井船上,有利于降低钻井成本。因此,连续管钻井技术在海域天然气水合物钻井方面具有广阔的应用前景。
由于海域天然气水合物埋藏浅,地质疏松,岩土胶结性差,导致水平井钻井过程中定向困难,且由于水平井钻井狗腿度较大,连续管钻井过程中管柱无法旋转,导致管柱摩擦阻力大,水平延伸困难。现有的连续管牵引器或爬行器多采用液压驱动,结构非常复杂,稳定性有待提高,
因此,亟需一种结构简单、稳定性较高、适用于海域天然气水合物连续管钻井用的装置,既可以解决定向困难的问题,又可以提高连续管水平延伸能力。
发明内容
针对如上所述的技术问题,本发明旨在提供一种用于天然气水合物连续管钻井的蠕动推进装置。该装置具有简单的结构,能够稳定地实现蠕动式的推进。
根据本发明,提出了一种用于天然气水合物连续管钻井的蠕动推进装置,包括中空的圆柱形本体。在所述本体中安装有蠕动机构、前抓紧机构和后抓紧机构,以及用于控制上述机构的第一控制器。其中,前抓紧机构和后抓紧机构构造成能够在所述第一控制器的控制下交替地与井壁接合和不接合。所述蠕动机构构造能够在所述后抓紧机构与井壁接合而所述前抓紧机构不与井壁接合时伸出,在所述前抓紧机构与井壁接合而所述后抓紧机构不与井壁接合时收回,从而实现所述蠕动推进装置的蠕动式移动。
在一个实施例中,所述蠕动机构包括第一电机、第一可伸缩结构,以及与所述第一可伸缩结构和所述前抓紧机构均固定连接的第一连接板。其中,所述第一电机构造成能够接收所述第一控制器发出的指令而转动,从而驱动所述第一可伸缩结构伸出,进而带动所述第一连接板在所述本体内运动。
在一个实施例中,所述蠕动机构还包括第二电机、第二可伸缩结构,以及与所述第二可伸缩结构和所述后抓紧机构均固定连接的第二连接板。其中,所述第二电机构造成能够接收所述第一控制器发出的指令而转动,从而驱动所述第二可伸缩结构伸出,进而带动所述第二连接板在所述本体内运动。
在一个实施例中,还包括通过扶正块安装在所述本体内的内筒,所述第一控制器、第一电机、第一可伸缩结构和第二电机、第二可伸缩结构都安装在所述内筒中。
在一个实施例中,所述本体和内筒间隔开布置,并且所述第一连接板和第二连接板均设有通孔,用于形成供井下流体流动的通道。
在一个实施例中,所述前抓紧机构包括前驱动单元和前动作单元,所述后抓紧机构包括后驱动单元和后动作单元。其中,所述前驱动单元和后驱动单元均能够在所述第一控制器的控制下输出转动,所述前动作单元和后动作单元能够分别响应于所述前驱动单元和后驱动单元的转动而径向地伸缩,从而与井壁形成接合或释放接合。
在一个实施例中,所述前驱动单元包括第二控制器、第三电机和第一旋转轮,所述第二控制器构造成从所述第一控制器中接收信号以驱动所述第三电机转动,最终驱动所述第一旋转轮旋转。所述后驱动单元包括第三控制器、第四电机和第二旋转轮,所述第三控制器构造成从所述第一控制器中接收信号以驱动所述第四电机转动,最终驱动所述第二旋转轮旋转。
在一个实施例中,所述前动作单元包括前齿轮组件和前径向伸缩组件,所述前齿轮组件与所述第一旋转轮连接,并将所述第一旋转轮的旋转转化为所述前径向伸缩组件的径向伸缩运动,所述前径向伸缩组件包括前锚爪,用于在所述前径向伸缩组件径向伸出时卡住井壁。所述后动作单元包括后齿轮组件和后径向伸缩组件,所述后齿轮组件与所述第二旋转轮连接,并将所述第二旋转轮的旋转转化为所述后径向伸缩组件的径向伸缩运动,所述后径向伸缩组件包括后锚爪,用于在所述后径向伸缩组件径向伸出时卡住井壁。
在一个实施例中,所述前、后齿轮组件均包括中心锥形齿轮,以及与所述中心锥形齿轮啮合的从动锥形齿轮。所述前、后径向伸缩组件均包括丝杠、螺母、沿径向布置的滑轨和顶杆,其中,所述丝杠能够在所述从动锥形齿轮的作用下旋转,从而使所述螺母沿滑轨滑动,进而带动顶杆和安装在所述顶杆末端处的前锚爪或后锚爪径向运动。
在一个实施例中,所述第一控制器构造成:促动所述后抓紧机构动作,从而使后动作单元中的后锚爪与井壁接合;促动所述蠕动机构动作,从而使第一可伸缩结构和第二可伸缩结构同时伸出;促动所述前抓紧机构动作,从而使前动作单元中的前锚爪与井壁接合;促动所述后抓紧机构动作,从而释放后锚爪与井壁的接合;促动所述蠕动机构动作,从而使第一可伸缩结构和第二可伸缩结构同时收缩;促动所述前抓紧机构动作,从而释放前锚爪与井壁的接合。
本发明基于仿毛虫蠕动原理,提出了一种天然气水合物连续管钻井用的推进装置。在定向段和水平段钻井过程中,根据本发明的蠕动推进装置能够稳定井下钻具组合,同时为定向造斜工具提供有力的力学支撑,从而提高海域天然气水合物浅层软地层钻井造斜能力。同时,根据本发明的蠕动推进装置还能为钻头加压,提高连续管水平井钻井延伸能力,为天然气水合物的钻采提供一种经济、可靠的技术手段。同时,根据本发明的蠕动推进装置由电力驱动,相比液压驱动方式,结构更加简单,可靠性更高、成本更低。
附图说明
下面将参照附图对本发明进行说明。
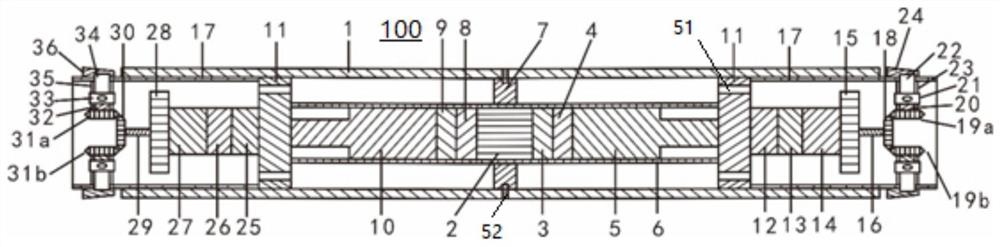
图1以剖视图的形式示意性显示了根据本发明的用于天然气水合物连续管钻井的蠕动推进装置的整体结构。
图2A到2G分别显示了用于天然气水合物连续管钻井的蠕动推进装置的一个工作周期内的各个动作过程。
在本申请中,所有附图均为示意性的附图,仅用于说明本发明的原理,并且未按实际比例绘制。在所有图中,相同的附图标记用于表示相同的零部件或结构。
具体实施方式
以下通过附图来对本发明进行介绍。为方便理解,在本申请中,将靠近井口的方向定义为前端、前方或相似用语,而将远离井口的方向定义为后端、后方或相似用语;同时,将沿着的蠕动推进装置长度方向称为纵向方向、轴向方向或类似用语,而与之垂直的方向称为横向方向、径向方向或类似用语。
图1显示了根据本发明的用于天然气水合物连续管钻井的蠕动推进装置100的整体结构。如图1所示,蠕动推进装置100包括圆柱形的中空本体1,以及安装在本体1中的中空内筒6。内筒6和本体1之间形成有间隙,供井下流体(例如钻井液)从中流过。内筒6通过扶正块7固定在本体1内,从而在本体1内保持其对中的状态。在图示实施例中,扶正块7可通过螺栓52固定在本体1的内壁上。
在内筒6中安装有第一控制器2。在如图1所示的优选的实施例中,第一控制器2安装在内筒6的中心区域,其用于接收地面信号,并发出控制指令来控制蠕动推进装置100中的各机构。第一控制器2是蠕动推进装置100中的核心控制单元,具体功能将在下文中进行介绍
根据本发明,在本体1中安装有蠕动机构40、前抓紧机构41和后抓紧机构42(见图2A)。其中,蠕动机构40包括以第一控制器2为中心轴向对称地布置的两组零部件。具体地说,一方面,如图1所示,蠕动机构40包括位于第一控制器2前方的第一电池3、第一电机4、第一可伸缩结构5和第一连接板11。第一电机4由第一电池3提供动力,并且与第一控制器2和第一可伸缩结构5均连接。因此,在第一控制器2发出的指令的控制下,第一电机4沿第一方向旋转,从而带动第一可伸缩结构5伸出。第一连接板11可滑动地安装在本体1内,并且与第一可伸缩结构5固定连接。这样,当第一可伸缩结构5伸出时,第一连接板11也随之运动。
类似地,另一方面,蠕动机构40包括位于第一控制器2后方的第二电池8、第二电机9、第二可伸缩结构10和第二连接板11。第二电机9由第二电池8提供动力,并且与第一控制器2和第二可伸缩结构10均连接。因此,在第一控制器2发出的指令的控制下,第二电机9沿第二方向旋转,从而带动第二可伸缩结构10伸出。第二连接板11可滑动地安装在本体1内,并且与第二可伸缩结构10固定连接。这样,当第二可伸缩结构10伸出时,第二连接板11也随之运动。
也就是说,如上所述,蠕动机构40能够在第一控制器2的控制下整体地向前方或后方移动,移动距离等于第一可伸缩结构5和第二可伸缩结构10各自伸出的距离之和。
根据本发明的一个具体的实施例,第一可伸缩结构5和第二可伸缩结构10可以由滚珠丝杠结构或活塞连杆机构形成。
另外,连接板11上沿周向设置若干个均匀布置的通孔51,供井下流体(例如钻井液)从中流过。
如图1和2A所示,前抓紧机构41包括前驱动单元和前动作单元。前驱动单元包括第二控制器12、第三电池13、第三电机14以及第一旋转轮15。第二控制器12用于从第一控制器2中接受控制指令,从而控制第三电机14的旋转。第三电机14由第三电池13提供动力,并且能驱动第一旋转轮15进行旋转。整个前驱动单元安装在滑筒17内,并且与第一连接板11固定连接,因此可随第一连接板11的向前或向后移动而向前或向后移动。
前动作单元与前驱动单元连接,并包括与旋转轮15连接的前齿轮组件,以及与前齿轮组件连接的前径向伸缩组件。具体地说,前齿轮组件包括与第一旋转轮15连接的第一连接杆16,安装在第一连接杆16上的第一主动锥形齿轮18,以及与第一主动锥形齿轮18啮合的两个第一从动锥形齿轮19a和19b。前径向伸缩组件包括两套径向上相对布置的零件,它们分别与第一从动锥形齿轮19a和19b连接。具体地说,每套均包括丝杠20、螺母21、顶杆22、滑轨23以及前锚爪24。以图1中上方那套为例,丝杠20与第一从动锥形齿轮19a相连,从而能够在第一从动锥形齿轮19a转动时也进行旋转,以便推动螺母21沿滑轨23运动,进而带动顶杆22运动。这样,固定在顶杆22的末端处的前锚爪24能够沿径向伸出于本体1之外,或者收回到本体1的内部。
如图1和2A所示,后抓紧机构42包括后驱动单元和后动作单元。后驱动单元包括第三控制器25、第四电池26、第四电机27以及第二旋转轮28。第三控制器25用于从第一控制器2中接受控制指令,从而控制第四电机27的旋转。第四电机27由第四电池26提供动力,并且能驱动第二旋转轮28进行旋转。整个后驱动单元安装在滑筒17内,并且与第二连接板11固定连接,因此可随第二连接板11的向后或向后移动而向后或向后移动。
后动作单元与后驱动单元连接,并包括与旋转轮28连接的后齿轮组件,以及与后齿轮组件连接的后径向伸缩组件。具体地说,后齿轮组件包括与第二旋转轮28连接的第二连接杆29,安装在第二连接杆29上的第二主动锥形齿轮30,以及与第二主动锥形齿轮30啮合的两个第二从动锥形齿轮31a和31b。后径向伸缩组件包括两套径向上相对布置的零件,它们分别与第二从动锥形齿轮31a和31b连接。具体地说,每套均包括丝杠32、螺母33、顶杆34、滑轨35以及后锚爪36。以图1中上方那套为例,丝杠32与第二从动锥形齿轮31a相连,从而能够在第二从动锥形齿轮31a转动时也进行旋转,以便推动螺母32沿滑轨35运动,进而带动顶杆34运动。这样,固定在顶杆34的末端处的后锚爪36能够沿径向伸出于本体1之外,或者收回到本体1的内部。
下面结合图2A到2G来说明根据本发明的蠕动推进装置100的一个工作周期内的各个动作过程。
如图2A所示,蠕动推进装置100处于初始状态,其中,蠕动机构40处于原位。此时,前锚爪24和后锚爪36均处于初始状态,即收回在本体1的径向之内的状态。
如图2B所示,当第一控制器2接收到地面传输来的推进信号时,向后抓紧机构42的第三控制器25发出指令。此时,第三控制器25控制第四电机27转动,从而通过第二旋转轮28和第二连接杆29而带动后动作单元的第二主动锥形齿轮30旋转。在齿轮啮合传动作用下,第二从动锥形齿轮也旋转,从而带动丝杠32旋转。这样,螺母32沿滑轨35向外滑动,进而带动顶杆34径向向外地运动。此时,后锚爪36径向地向外伸出,从而卡住井壁。
如图2C所示,第一控制器2随后控制蠕动机构40伸出。具体地说,第一控制器2控制第一电机4和第二电机9沿相反的方向转动,从而带动第一可伸缩结构5和第二可伸缩结构9同时伸出。由于此时后锚爪36卡住了井壁,因此推进装置100的前部(即前抓紧机构41所处的部分)会向前移动一段距离,其等于第一可伸缩结构5和第二可伸缩结构10伸出的距离之和。
如图2D所示,第一控制器2随后向前抓紧机构41的第二控制器12发出指令。此时,第二控制器12控制第三电机14转动,从而通过第一旋转轮15和第一连接杆16带动前动作单元的第一主动锥形齿轮18旋转。在齿轮啮合传动作用下,第一从动锥形齿轮也旋转,从而带动丝杠20旋转。这样,螺母21沿滑轨23向外滑动,进而带动顶杆22径向向外地运动。此时,前锚爪24径向地向外伸出,从而卡住井壁。
如图2E所示,第一控制器2向后抓紧机构42的第三控制器25发出指令,执行与针对图2B所述的相反的一系列动作。此时,后锚爪36向内收回至本体1之内,从而不再卡住井壁。
如图2F所示,第一控制器2随后控制蠕动机构40收缩,具体地说,第一控制器2控制第一电机4和第二电机9各自沿着与执行针对图2C所述的相反的方向转动,从而带动第一可伸缩结构5和第二可伸缩结构9同时收缩。由于此时前锚爪24卡住了井壁而后锚爪36不再卡住井壁,因此推进装置100的后部(即后抓紧机构42所处的部分)也会向前移动一段与推进装置100的前部所移动的相同的距离。
如图2G所示,第一控制器2向前抓紧机构41的第二控制器12发出指令,执行与针对图2D所述的相反的一系列动作。此时,前锚爪24向内收回至本体1之内,从而不再卡住井壁。
对比图2A和图2G可知,推进装置100整体上向前移动了一段等于第一可伸缩结构5和第二可伸缩结构10各自伸出距离之和的距离。由此,根据本发明的用于天然气水合物连续管钻井的蠕动推进装置100完成了一个周期的前进运动,从如图2A所示的位置“蠕动式”前进到图2G所示的位置。在一个实施例中,井下蠕动推进器100的一个步进距离可以设置为2m。
从上可知,当前锚爪26和/或后锚爪36卡住井壁时,钻井液仍然能够经由内筒6和本体1之间的环空以及第一和第二连接板11上的通孔51正常流动,其功能不受影响。
容易理解,如果蠕动推进装置100需要向后方蠕动,则以相反顺序再执行上述一系列动作即可。
本发明基于仿毛虫蠕动原理,提出了一种天然气水合物连续管钻井用的推进装置。在定向段和水平段钻井过程中,根据本发明的蠕动推进装置能够稳定井下钻具组合,同时为定向造斜工具提供有力的力学支撑,从而提高海域天然气水合物浅层软地层钻井造斜能力。同时,根据本发明的蠕动推进装置还能为钻头加压,提高连续管水平井钻井延伸能力,为天然气水合物的钻采提供一种经济、可靠的技术手段。同时,根据本发明的蠕动推进装置由电力驱动,相比液压驱动方式,结构更加简单,可靠性更高、成本更低。
需要说明的是,图中所示的各个电机、电池等部件的位置均是示意性的,它们可以根据具体情况的需要而设置在合适的位置。
最后应说明的是,以上所述仅为本发明的优选实施方案而已,并不构成对本发明的任何限制。尽管参照前述实施方案对本发明进行了详细的说明,但是对于本领域的技术人员来说,依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种适用于天然气水合物地层钻井的水合物分解抑制剂
- 一种适用于天然气水合物地层的钻井方法及钻井设备