带粗略角度控制的激光雷达系统
文献发布时间:2023-06-19 19:07:35
技术领域
各种示例性实施方案涉及一种激光雷达系统(即,光检测和测距系统)。
背景技术
激光雷达系统是照亮场景以提供关于场景的信息(例如其中的物体(例如,其大小、速度、移动方向等))的扫描系统。示例性激光雷达架构具有精细角度控制元件(例如,光学相控阵OPA)和(单独的)粗略角度控制元件(例如,液晶偏振光栅LCPG),用于控制发射到场景上的光的方向(换句话说,用于引导发射到激光雷达系统的视野中的光束)。在这种示例性架构中,视野被分成多个区段(也称为块),光可以被引导到所述多个区段上(并且可以从其接收光)。
例如,激光雷达系统可以被设计用于+/-10°至+/-60°的视野,并且LCPG可以具有4个到16个水平块,测量系统切换通过所述水平块,即经由LCPG在激光雷达框架内一个接一个地接近视野中的块。激光雷达系统例如可以具有1个至16个激光二极管作为光源,所述激光二极管也可以被设计为可单独切换。典型激光雷达测量在水平方向上所需的分辨率为约0.05°至1°。因此,在绝大多数情况下,利用激光二极管通道在LCPG块内实现水平分辨率,使得一个或多个激光器照亮某个列并因此实现水平分辨率,这是不足够的。因此,精细角度控制元件也用于水平分辨率,即,利用精细角度控制元件(例如,利用一维MEMS反射镜)来实现LCPG的一个块内的水平分辨率。举例来说,精细角度控制元件用于实现水平方向上的精细光束偏转。因此,激光雷达系统具有用于实现精细光束偏转的部件,其增加系统的复杂性,例如,关于所需的光学器件以及部件的操作与光源的操作的所需的同步。
作为另一示例,LCPG可以与闪光照明和飞行时间(ToF)相机的二维检测器阵列一起使用。然而,在这种配置中,相机的整个视野(也称为场)立即被照亮,导致强度降低,且因此范围缩小。
发明内容
各种实施方案涉及一种激光雷达系统,其中空间分辨率的一部分(例如,第一方向上的分辨率)由发射器侧(也称为透射侧)提供,而空间分辨率的另一部分(例如,第二方向上的分辨率)由接收器侧提供。在各种实施方案中,交换激光雷达系统的发射器侧和接收器侧的扫描方向,使得透射器侧用于一个方向(例如,竖直方向)上的分辨率,而接收器侧用于不同方向(例如,水平方向)。
可以提供一种激光雷达系统,其中激光雷达测量的空间分辨率的一部分(例如,第一方向上的空间分辨率)由激光雷达系统的多个子光源(例如,单独的激光二极管)的空间布置提供,而激光雷达测量的空间分辨率的另一部分(例如,第二方向上的空间分辨率)由激光雷达系统的检测器的多个检测器像素的空间布置提供。各种实施方案涉及一种激光雷达系统,其中激光雷达测量的(二维)空间分辨率由多个子光源相对于检测器像素的布置提供。
在附图中,第一方向和第二方向可以表示为水平方向和竖直方向(或反之亦然)。然而,可以理解,第一方向和第二方向可以是彼此成角度的任意两个方向,其使子光源能够朝向激光雷达系统的视野发射光并且使检测器像素能够接收来自激光雷达系统的视野的光。举例来说,第一方向和第二方向可以是要沿其实现空间分辨率的任意两个方向。
激光雷达系统可以具有用于控制发射光和/或接收光的光束方向的粗略角度控制元件。粗略角度控制元件可以被配置为控制(例如,改变)由激光雷达系统发射到视野中的光和由激光雷达系统从视野接收的光两者的传播方向。
粗略角度控制元件可以被理解为按以下方式配置(例如,可控制)的装置:所述装置控制传播通过(换句话说,穿过)粗略角度控制元件的光的传播方向。举例来说,粗略角度控制元件可以被配置为提供偏转角(也称为偏离角)以偏转传播通过粗略角度控制元件的光(例如,以提供可控输出角)。可以通过控制粗略角度控制元件的一个或多个性质(诸如相对于图2A至图2F描述的)来定义偏转角。粗略角度控制元件可以实现对偏转角的粗略控制,使得偏转角不会连续变化,而是可以取多个离散值中的一个离散值。粗略角度控制元件可以被配置(例如,被控制)为采取多个可能操作状态中的一个可能操作状态,其中操作状态定义光的对应偏转角。可能操作状态的数量(在各个方面中,可能偏转角的数量)可以取决于粗略角度控制元件的性质(例如,取决于可切换液晶层的数量,仅作为示例),如将在下文更详细地说明的。粗略角度控制元件可以是或具有液晶偏振光栅。然而,应当理解,液晶偏振光栅只是可能的粗略角度控制元件的一个示例,并且也可以使用其他类型的装置(例如,反射镜)。
就离散地控制光发射的偏转角而言,视野可以被认为是由多个块(举例来说,多个离散区段)组成的。每个块可以分配给对应的偏转角。术语块(例如,视野块或LCPG块)可在本文中用于描述视野的某个区段,可经由对发射光的偏转角的离散控制而将光偏转到所述区段中。块还可以描述可以从其接收(例如,检测)光的视野的(离散)区段。
检测器可用于块内的第一方向分辨率。单独子光源或子光源组(例如,激光二极管或激光二极管组)可以用于块内第二方向上的分辨率。例如,在块的视野的行少于列的情况下,检测器可用于水平方向上的分辨率,并且光发射器可用于竖直方向上的分辨率。例如,接收二极管阵列(例如,雪崩光电二极管阵列APD)可相比激光二极管阵列中的通道(例如,多达8个、16个或32个,这可能显着增加复杂性和成本)用于更多的行(例如,多达64个或128个)。
结合粗略角度控制元件的角度偏转可能性,检测器像素和子光源的相对空间布置可以免除精细角度偏转元件,例如OPA或MEMS反射镜(仅作为示例)。在各种实施方案中,可以通过光源(例如,激光棒)和检测器(例如,1D检测器阵列)的交叉布置来实现块内的空间分辨率。按顺序使用子光源(例如,激光棒的激光二极管,诸如8激光棒或16激光棒)可以实现一个方向上的空间分辨率。举例来说,可以一个接一个地点亮(举例来说,激活)光源的子光源(例如,激光棒的激光二极管)以便提供空间分辨率。
这可以具有可以省略复杂部件(OPA、MEMS等)的优点。这也消除了控制这种部件(通常利用FPGA或ASIC来实现)的需要并且光学器件变得更简单。也不再存在来自子光源(例如,来自激光器)的光必须适合精细角度偏转元件的问题。光学器件由更少的透镜构成,这意味着损耗更低,并且组装工作也减少。通过取消精细角度偏转元件,激光雷达系统的成本和复杂性显著降低。此外,在没有精细角度偏转元件的情况下,存在不需要任何移动零件的真正的固态激光雷达,这也可以增加可靠性。
各种实施方案涉及一种激光雷达系统,其中可以在不使用精细角度控制元件(例如,不使用MEMS反射镜)的情况下实现二维空间分辨率。在各种实施方案中,激光雷达系统可以被描述为具有LCPG而没有MEMS的激光雷达系统,例如具有LCPG的闪光激光雷达。
激光雷达系统可以具有:检测器,所述检测器被配置为检测来自视野的光,其中检测器具有沿第一方向布置的多个检测器像素,其中多个检测器像素中的每个检测器像素被分配给视野的相应子区段;光源,所述光源具有多个子光源,所述多个子光源按其将光发射到视野中的方式进行配置,其中沿着与第一方向呈某个角度的第二方向布置多个子光源中的子光源,其中多个子光源中的每个子光源被分配给视野的相应子区段;粗略角度控制元件,所述粗略角度控制元件被配置为将来自光源(例如,来自子光源)的光偏转到视野并将光从视野偏转到检测器;以及光发射控制器,所述光发射控制器被配置为控制多个子光源中的子光源,使得多个子光源中的每个子光源在各自的发射时间段内发射光。
第二方向可垂直于第一方向。作为示例,第一方向可以是水平方向并且第二方向可以是竖直方向。作为另外的示例,第一方向可以是竖直方向并且第二方向可以是水平方向。
例如,第一方向和第二方向可以垂直于激光雷达系统的光轴。
粗略角度控制元件可以被配置为将光以相对于激光雷达系统的光轴的偏转角偏转。偏转角可以是多个离散偏转角中的一个离散偏转角(例如,被分配给粗略角度控制元件的相应操作状态)。
粗略角度控制元件可以被配置为以第一偏转角偏转来自光源的光,以照亮视野的某个区段。举例来说,粗略角度控制元件可以被配置为控制发射到视野中的光的偏转角(和输出角),使得光被发射到视野的某个区段中。粗略角度控制元件可以被配置(例如,被控制)为顺序地提供不同的偏转角,使得视野的不同区段被顺序地照亮。
粗略角度控制元件可以被配置为以第二偏转角偏转来自视野的光,以将来自视野的区段的光偏转到检测器上。
视野的照亮区段可以在第一视野方向上具有约2°至约20°的第一角度延伸并在垂直于第一视野方向的第二视野方向上具有约2°至约20°的第二角度延伸。
视野的区段的角度延伸可以取决于粗略角度控制元件的性质。视野可以被分成的区段(例如,在水平方向或竖直方向上)的数量可以取决于粗略角度控制元件的性质。
例如,第一视野方向和第二视野方向可以垂直于激光雷达系统的光轴。作为示例,第一视野方向可以是水平方向并且第二视野方向可以是竖直方向。
视野的每个区段(例如,每个块)可以被分成多个子区段,例如,第一方向上的第一多个(第一)子区段和第二方向上的第二多个(第二)子区段。
子区段可以被分配给相应的检测器像素。例如,沿着检测器像素在其上布置的方向的每个子区段可以被分配给相应的检测器像素。举例来说,每个检测器像素可以检测来自分配的子区段的光。第一方向上的分辨率可以取决于(例如,成比例于)第一方向上的子区段的数量(在各个方面,取决于检测器像素的数量)。子区段可以被分配给相应的子光源。例如,每个区段可以被分配给沿着子光源在其上布置的方向的相应子光源。举例来说,每个子光源可以将光发射到分配的子区段中。根据各种实施方案,第二方向上的分辨率可以取决于(例如,成比例于)第二方向上的子区段的数量(在各个方面,取决于子光源的数量)。
为了实现偏转角,可以在第一视野方向(例如,水平或竖直方向)上设置第一偏转角元素(也称为偏转角部分或偏转角分量),并且可以在垂直于第一视野方向的第二视野方向上设置第二偏转角元素。举例来说,粗略角度控制元件可以被配置为在一个方向和/或两个方向上偏转光(例如,激光雷达系统可以是1D扫描系统或2D扫描系统)。
仅作为数值示例,第一输出角元素可以具有相对于激光雷达系统的光轴范围在从约-60°到约+60°的值。仅作为数值示例,第二输出角元素可以具有相对于激光雷达系统的光轴范围在从约-15°到约+15°的值。
多个子光源可以具有第一子光源和第二子光源。光发射控制器可以被配置为控制第一子光源和第二子光源,使得第一子光源在第一发射时间段内发射光并且第二子光源在第二发射时间段内发射光。第一发射时间段与第二发射时间段之间的等待时间大于或基本等于发射光的最大传输时间。
例如,第二发射时间段可以在第一发射时间段之后(然后是另外的发射时间段,例如来自另外的子光源)。
等待时间使由第一子光源发射的光能够在第二子光源发射光之前返回到激光雷达系统(并被检测器检测到)。因此,可以减少或基本消除来自不同子光源的光发射之间的重叠,并且因此可以提高测量的质量。
激光雷达系统还可以具有角度控制器,所述角度控制器被配置为控制粗略角度控制元件的一个或多个光偏转性质以定义偏转光的偏转角。角度控制器可以被配置为控制粗略角度控制元件在第一角度控制时间段内提供偏转光的第一偏转角并在第二角度控制时间段内提供偏转光的第二偏转角。例如,第二角度控制时间段可以在第二角度控制时间段之后。例如,角度控制器可以被配置为按可以一个接一个地提供不同偏转角的方式来控制粗略角度控制元件的光偏转性质。
光发射控制器可以被配置为控制多个子光源中的子光源,使得每个子光源在第一角度控制时间段内的相应发射时间段内发射光,并且每个子光源在第二角度控制时间段内的相应发射时间段内发射光。
举例来说,光发射控制器可以被配置为按以下方式控制多个子光源中的子光源:视野的区段(例如,被分配给第一偏转角)被完全照亮(换句话说,每个子区段由分配的子光源照亮)。
粗略角度控制元件可以具有至少一个液晶元件。例如,粗略角度控制元件可以是或具有液晶偏振光栅。液晶偏振光栅的光栅周期可以定义偏转角。
作为另一示例,粗略角度控制元件可以具有液晶层和偏振光栅。液晶层可以按其定义传播通过液晶层的光的偏振的方式进行布置。偏振光栅可以被配置为基于光的偏振来定义光的偏转角。
粗略角度控制元件可以是或具有液晶偏振光栅。角度控制器可以被配置为向液晶偏振光栅提供控制信号(例如,诸如调制电压之类的电压,例如DC电压,其被打开和关闭)以控制液晶分子的排列。液晶分子的排列定义液晶偏振光栅的光栅周期。
例如,角度控制器可以被配置为在第一角度时间段内向液晶偏振光栅提供第一控制信号,以便定义液晶偏振光栅的第一光栅周期。角度控制器可以被配置为在第二角度时间段(例如,在第一角度时间段之后)内向液晶偏振光栅提供第二控制信号,以便定义液晶偏振光栅的第二光栅周期。举例来说,角度控制器可以控制液晶偏振光栅的光栅周期以提供各种偏转角。
粗略角度控制元件可以具有液晶层和偏振光栅。角度控制器可以被配置为向液晶层提供控制信号以控制液晶层的液晶分子的排列。液晶分子的排列定义(例如,改变)传播通过液晶层的光的偏振。
例如,角度控制器可以被配置为在第一角度时间段内向液晶层提供第一控制信号,以便定义传播通过液晶层的光的第一偏振。角度控制器可以被配置为在第二角度时间段内向液晶层提供第二控制信号,以便定义传播通过液晶层的光的第二偏振。因此,偏振光栅可以基于第一偏振在第一角度时间段内对光提供第一偏转角,并基于第二偏振在第二角度时间段内对光提供第二偏转角。
光源可以具有至少一个激光光源。例如,子光源可以具有至少一个激光光源(例如,每个子光源可以是或具有激光光源)。例如,至少一个激光光源可以具有激光二极管。作为示例,至少一个激光二极管可以是边缘发射激光二极管或部件侧发光二极管(垂直腔面发射激光器VCSEL)。
光源可以具有激光棒。举例来说,子光源可以是激光棒的激光二极管。例如,激光棒的快轴可以沿着子光源在其上布置的方向(例如,沿着第二方向)进行对准。
检测器可以具有至少一个光电二极管。光电二极管可以被配置为在光击中至少一个光电二极管时生成电信号(例如,电压或电流)。例如,每个检测器像素可以具有光电二极管或被分配(例如,连接)到相应的光电二极管。应当理解,每个检测器像素也可以具有多个光电二极管或者可以被分配到多个光电二极管(例如,以硅光电倍增管的方式)。例如,至少一个光电二极管可以是雪崩光电二极管,例如单光子雪崩光电二极管。清楚地说,检测器可以是或具有多像素单光子雪崩光电二极管。
激光雷达系统还可以具有光学阵列接收器。光学阵列接收器可以被配置为从视野接收光并将接收的光引导到检测器上。在各个方面,光学阵列接收器可以被配置为将视野(例如,视野的区段)映射到检测器上。例如,光学阵列接收器可以按其将视野的相应子区段映射到分配的检测器像素上的方式进行配置。例如,光学阵列接收器可以布置在检测器与粗略角度控制元件之间。
光学阵列接收器可以具有一个或多个透镜(例如,一个或多个聚焦透镜)。一个或多个透镜可以被配置为将接收的光聚焦在检测器上(例如,在相应的检测器像素上)。
激光雷达系统还可以具有光学阵列透射器。光学阵列透射器可以被配置为从光源(例如,从子光源)接收光并将接收的光引导到粗略角度控制元件上。例如,光学阵列透射器可以布置在光源与粗略角度控制元件之间。光学阵列透射器可以具有第一准直器透镜。第一准直器透镜可以被配置为将光源发射的光准直到粗略角度控制元件上。例如,第一准直器透镜可以按其在第一(光学)方向上准直光的方式进行配置。例如,第一准直器透镜可以在光源的慢轴的方向上准直光,例如在垂直于子光源在其上布置的方向的方向上。例如,第一准直器透镜可以是慢轴准直器(SAC)。
光学阵列透射器可以具有第二准直器透镜。第二准直器透镜可以布置在光源与第一准直器透镜之间。第二准直器透镜可以按其将由光源发射的光准直到第一准直器透镜上的方式进行配置。例如,第二准直器透镜可以按其在第二(光学)方向上准直光的方式进行配置。例如,第二准直器透镜可以在光源的快轴的方向上准直光,例如在垂直于子光源在其上布置的方向的方向上。例如,第二准直器透镜可以是快轴准直器(FAC)透镜。
光学阵列透射器还可以具有用于混合由多个子光源中的每个子光源发射的光的多透镜阵列。例如,多透镜阵列可以布置在光源与粗略角度控制元件之间(例如,第一准直器透镜与粗略角度控制元件之间)。多透镜阵列可以具有沿着第二方向(清楚地说,沿着子光源在其上布置的方向)的区域结构。区域结构使由一个子光源发射的光能够与由另一个子光源发射的光良好地分离。
激光雷达系统可以被配置为闪光激光雷达系统或者可以是闪光激光雷达系统。
车辆可以具有如本文描述的一个或多个激光雷达系统。
附图说明
示例性实施方案在附图中示出并且将在下文进行更详细的描述。
在附图中:
图1A和图1B各自示出了激光雷达系统的示意图。
图1C示出了激光雷达系统的视野的示意图。
图2A和图2B各自示出了粗略角度控制元件的示意图。
图2C示出了粗略角度控制元件的第一操作模式。
图2D示出了在粗略角度控制元件的第一操作模式下的照亮视野。
图2E示出了粗略角度控制元件的第二操作模式。
图2F示出了在粗略角度控制元件的第二操作模式下的照亮视野。
图3A至图3C各自示出了光源的示意图。
图3D是粗略角度控制元件的块的示意图。
图3E至图3H各自示出了光发射系统的示意图。
图4A至图4C各自示出了检测器的示意图。
图4D是粗略角度控制元件的块的示意图。
图4E示出了接收器阵列的示意图。
图5A至图5C各自示出了激光雷达系统的示意图。
具体实施方式
在以下详细描述中,参考了构成其一部分的附图,并且在附图中示出了其中可以实施本发明的特定实施方案以用于说明。
图1A和图1B各自示出了根据各种实施方案的激光雷达系统100的平面图的示意图。作为示例,激光雷达系统100可以并入到(例如,集成到)车辆(例如,配备有例如自动驾驶功能的轿车)中。
激光雷达系统100可以具有用于将光发射到视野102中的发射器侧和用于接收(例如,检测)来自视野102的光的接收器侧。激光雷达系统100还可以具有用于控制(例如,改变)光从发射器侧到视野102和/或从视野102到接收器侧的传播方向的角度控制级。
视野102可以是激光雷达系统100的视野。举例来说,视野102可以对应于发射器侧的发射场(例如,光源或多个子光源的发射场)和/或对应于接收器侧的视野(例如,检测器的视野)。举例来说,激光雷达系统100的检测器的视野可以基本上对应于激光雷达系统100的光源(例如,多个子光源)的发射场。
激光雷达系统100可以具有检测器104(例如,在接收器侧,例如,作为光检测系统的一部分)。检测器104可以被配置为检测来自视野102的光。检测器104可以被配置为在光击中检测器104(例如,一个或多个检测器像素)时提供信号(例如,电信号,诸如电压或电流),如下文更详细地说明的(例如,参考图4A至图4E)。
例如,可以将信号从检测器104提供到激光雷达系统100的一个或多个处理器(例如,来自检测器104的模拟信号可以使用模数转换器转换为数字信号并提供到处理器)。例如,一个或多个处理器可以被配置为分析来自检测器104的信号(或多个信号)以再现视野102中的场景。
检测器104可以具有多个检测器像素106。多个检测器像素106中的检测器像素106可以沿第一方向(例如,沿图1A所示的水平方向或沿图1B所示的竖直方向)布置。在各种实施方案中,检测器像素106可以沿着第一方向形成阵列。至少一个检测器像素106(例如,每个检测器像素106)可以被配置为在光击中检测器像素106时生成信号(例如,电流,诸如光电流)(例如,信号可以与入射光的量成比例),如将在下文更详细地说明的。
多个检测器像素106中的每个检测器像素106可以被分配到视野102的相应子区段。在各个方面,每个检测器像素106可以专用于检测来自视野106的对应子区段的光。举例来说,每个检测器像素106可以接收来自视野102的对应子区段的光以检测来自其的光。在各个方面,激光雷达系统100的接收器侧(和/或角度控制级)可以被配置为使得视野102的每个子区段被映射到对应的检测器像素106上。
激光雷达系统100(例如,在发射器侧,例如作为光发射系统的一部分)可以具有光源110。光源110可以具有多个子光源112(也称为光束、光发射器或发射器像素)。在各个方面,光源110可以具有多个单独的光源112,所述多个单独的光源是单独可寻址的(例如,可控制的),如将在下文例如相对于图3A至图3G更详细地论述的。子光源112(通常为光源110)可以按其将光发射到视野102中的方式进行配置。
多个子光源112中的子光源112可以沿第二方向布置。在各个方面,子光源112可以沿着第二方向形成阵列。
第二方向可以与第一方向成角度。第一方向与第二方向之间的角不能为0°或180°;换句话说,第一方向不能平行于第二方向(举例来说,第二方向不能是与第一方向相同的方向)。第一方向和第二方向可以是相互形成角度且能够使光被发射和接收的任意两个方向。举例来说,第一方向可以是与激光雷达系统100的光轴108形成角度并且使检测器104能够接收来自视野102的光的任何方向。第二方向可以是与激光雷达系统100的光轴108形成角度并且使光源110(例如,子光源112)能够朝向视野102发射光的任何方向。在各个方面,第一方向和第二方向可以垂直于激光雷达系统100的光轴108(例如,光轴108可以沿着图1A和图1B中的方向152对准)。
在各种实施方案中,第一方向和第二方向可以彼此垂直。例如,第一方向可以是水平方向,诸如图1A和图1B中的方向154,而第二方向可以是竖直方向,诸如图1A和图1B中的方向156。在这种情况下,检测器像素106可以布置成行并且光源112可以布置成列(参见图1A)。作为另外的示例,第一方向可以是竖直方向并且第二方向可以是水平方向。在这种情况下,检测器像素106可以布置成列并且光源112可以布置成行(参见图1B)。
每个子光源112可以被分配给视野102的相应子区段(或相应的多个子区段)。子光源112可以按以下方式进行配置(例如,布置):每个子光源112照亮视野102的相应子区段(例如,块的子区段,如将在下文更详细地说明的)。在各个方面,激光雷达系统100的发射器侧(和/或角度控制级)可以被配置为使得视野102的每个子区段被对应的子光源112照亮。
检测器像素106与子光源112之间的相对空间布置(例如,交叉布置)(以及检测器像素106和子光源112到视野102的相应子区段的分配)可以使检测器像素106能够用于提供第一方向上的空间分辨率并使子光源112能够用于提供第二方向上的空间分辨率。
激光雷达系统100(例如,光发射系统)可以具有光发射控制器118(例如,一个或多个处理器)。光发射控制器118可以被配置为控制光源110的光发射。在各个方面,光发射控制器118可以控制多个子光源112中的子光源112,使得每个子光源112在相应发射时间段内发射光。
光发射控制器118可以将发射时间段分配给每个子光源112,使得单个子光源112在每个发射时间段内发射光。举例来说,光发射控制器118可以被配置为按以下方式控制子光源112:每个子光源112在对应发射时间段期间而不是在与另一子光源112相关联的发射时间段期间发射光。这可以意指:子光源112的光发射基本上不存在(例如,时间和/或空间)重叠。因此,可以在子光源112沿其布置的方向上实现任何(例如,预定义的)空间分辨率。
光发射控制器118可以被配置为按以下方式控制子光源112:子光源与对粗略角度控制元件114的控制协调(例如,同步)地发射光,如将在下文更详细地说明的。
激光雷达系统100可以具有粗略角度控制元件114(例如,在角度控制级)。粗略角度控制元件114可以被配置为偏转光,例如,从光源110发射到视野102中的光和来自视野102并朝向检测器104(例如,朝向接收器侧)的光两者。换句话说,粗略角度控制元件114可以被布置为使得其将来自光源110(例如,来自子光源112)的光偏转到视野102(例如,以第一偏转角)并使得其将来自视野102的光偏转到检测器104(例如,以第二偏转角)。粗略角度控制元件114可以被配置为以多个偏转角(例如,离散偏转角)偏转光(诸如相对于图2A至图2F描述的)。
根据各种实施方案,粗略角度控制元件114可以被配置为以(例如,离散)偏转角将来自子光源112的光偏转到视野102中,使得视野102的某个区段被照亮。举例来说,粗略角度控制元件114可以被配置为控制发射到视野102中的光的偏转角(和输出角),使得光被发射到视野102的某个区段中。粗略角度控制元件114可以被配置(例如,被控制)为顺序地提供不同的偏转角,使得视野102的不同区段被顺序地照亮,如将在下文更详细地说明的。
视野102可以被理解为具有多个区段(块),所述多个区段各自被分配给对应的偏转角。根据各种实施方案,在图1C中示出了视野102到多个区段116的示例性划分。
视野102可以具有沿着第一方向的第一多个区段和沿着第二方向的第二多个区段(例如,可以被分成第一多个区段和第二多个区段)。作为非限制性示例,如图1C所示,视野102可被描述为沿水平方向和竖直方向布置的块116矩阵(例如,视野102可被分成多行和多列,所述多行和多列各自被分配多个块116)。应当理解,视野102的划分(例如,块116的布置)可以具有任何形状和配置,例如,取决于第一方向相对于第二方向的相对布置。
根据各种实施方案,视野102被分成的块116的数量(例如,第一方向和第二方向上的块116的数量)可以取决于激光雷达系统100的配置,例如,取决于粗略角度控制114的配置。视野102在第一方向和第二方向上的角度延伸可以取决于激光雷达系统100的配置。仅作为数值示例,视野102可以在水平方向上具有值的范围从100°到130°(例如,120°,即相对于光轴108+/-60°)的角度延伸。作为另一数值示例,视野102可以在竖直方向上具有值的范围从10°到60°(例如,20°,即相对于光轴108+/-10°,或者24°)的角度延伸。
仅作为数值示例,如图1C所示,视野102可以具有在水平方向上布置的七个块和在竖直方向上布置的八个块。作为另一数值示例,视野102可以具有水平方向上的八个块和竖直方向上的四个块。作为另一数值示例,视野102可以包括水平方向上的八个块和竖直方向上的六个块。
块116的大小(例如角度延伸)可以取决于粗略角度控制元件114的性质(例如,利用粗略角度控制元件114可实现的角度)。
块116可以全部具有相同大小(例如,在第一方向和第二方向上具有相同的角度延伸)。在各个方面,至少一个块116可以具有相对于另一块116不同的大小。例如,在视野102的边缘处的块116可以具有比在视野102的中心的块116更大的大小(例如,更大的角度延伸,例如,在水平方向上,如图1C中所示第一块116-1具有比第二块116-2更大的大小)。
作为数值示例,块116可以在第一视野方向(例如,第一方向)上具有第一角度延伸,其具有范围从约2°到约20°的值。例如,块116可以在水平方向上具有约4°(例如约7.5°,例如约15°)的角度延伸。
作为数值示例,块116可以在第二视野方向(例如,垂直于第一视野方向,诸如在第二方向)上具有第二角度延伸,其具有范围从约2°到约20°的值。例如,块116可以在竖直方向上具有约2.5°(例如约4°,例如约6°,例如约15°)的角度延伸。
视野102的每个块116可以被分成多个子区段,例如,分成第一方向上的第一多个(第一)子区段以及分成第二方向上的第二多个(第二)子区段。
激光雷达系统100在一个方向(例如,在第一方向和/或第二方向)上的空间分辨率可以取决于块116沿着所述方向的角度延伸并取决于沿着所述方向布置的检测器像素112或子光源116的数量。可以通过以下在某个方向上计算激光雷达系统100的分辨率:将块116沿着所述方向的角度延伸除以沿着所述方向布置的子光源112或检测器像素106的数量。举例来说,沿着某个方向布置的子光源112或检测器像素106的数量可以对应于在所述方向上块116可以被分成的子区段的数量。
作为数值示例,若块116在水平方向上具有15°的角度延伸并且64个检测器像素106被布置在所述方向上,则可以在所述方向上实现约0.23°的分辨率。作为另一数值示例,若块116在竖直方向上具有2.5°的角度延伸并且8个子光源112被布置在所述方向上,则可以在所述方向上实现约0.31°的分辨率。作为另一数值示例,若块116具有7.5°×4°的角度延伸,检测器104具有在水平方向上布置的64个检测器像素106并且光源110具有在竖直方向上布置的16个子光源112,则可以实现约0.12°的水平分辨率和约0.25°的竖直分辨率。作为另一数值示例,若块116具有4°×6°的角度延伸,检测器104具有在竖直方向上布置的32个检测器像素106并且光源110具有在水平方向上布置的16个子光源112,则可以实现约0.25°的水平分辨率和约0.19°的竖直分辨率。
粗略角度控制元件114可以被配置为以第二偏转角将光从视野102偏转到检测器104。粗略角度控制元件114可以被配置为接收来自视野102的光并且将接收的光偏转到激光雷达系统100的接收器侧(例如,到光学阵列接收器,诸如相对于图4E描述的)。
第一偏转角可以具有与第二偏转角相同的值(例如,相对于光轴108,例如,在水平方向上和/或在竖直方向上)。在各个方面,与第二偏转角相比,第一偏转角可以具有不同的值,例如,取决于入射光的方向和/或取决于粗略角度控制元件114的状态。
图2A和图2B各自示出了粗略角度控制元件200(例如,图1A和图1B所示的粗略角度控制元件114)的示意图。
如图2A和图2B中的箭头所示,粗略角度控制元件200可以被配置为在多个方向上偏转光,例如以便以多个偏转角偏转光。经偏转光可以被偏转(参见图2A)到视野202(例如,激光雷达系统的视野,例如,到激光雷达系统100的视野102)以照亮例如视野202的区段。经偏转光可以是从视野202接收的光,例如偏转到激光雷达系统的检测器(例如,激光雷达系统100的检测器104)上,参见图2B。在各个方面,粗略角度控制元件200可以被配置为以与光在其上传播的方向无关的偏转角偏转光。偏转角可以是相对于粗略角度控制元件200的光轴的角(例如,相对于激光雷达系统的光轴,例如激光雷达系统100的光轴108)。
偏转角可以选自多个(离散)偏转角。换句话说,粗略角度控制元件200可以被配置(例如,被控制)为提供来自一组可能偏转角的偏转角。在各个方面,每个偏转角可以被分配给粗略角度控制元件200的相应操作状态。粗略角度控制元件200的角度分辨率(例如,可能偏转角之间的最小差值)可以取决于粗略角度控制元件200的特性。例如,粗略角度控制元件200可以具有角度分辨率(例如,在水平方向和/或竖直方向上),其为10°,例如5°,例如大于1°或大于3°。作为另一示例,粗略角度控制元件200可以具有在从约1°到约15°的范围内的角度分辨率。仅作为数值示例,粗略角度控制元件200可以具有在水平方向上7.5°和在竖直方向上6°的角度分辨率。
粗略角度控制元件200可以被配置为在一个方向上和/或在两个方向上引导光。偏转角可以具有第一视野方向(例如,水平或竖直方向)上的第一偏转角元素和与第一视野方向成角度(例如,垂直于第一视野方向)的第二视野方向上的第二偏转角元素。例如,第一视野方向和第二视野方向可以垂直于粗略角度控制元件200的光轴。
在某个方向上的偏转角元素的值的范围可以定义视野202在所述方向上的角度延伸。作为示例,第一输出角元素可以具有相对于粗略角度控制元件200的光轴范围在从约-60°到约+60°的值。作为另外的示例,第二输出角元素可以具有相对于粗略角度控制元件200的光轴范围在从约-15°到约+15°的值。
如图2C和图2E所示,角度控制器204可以被配置为控制粗略角度控制元件200。例如,角度控制器204可以是激光雷达系统(诸如激光雷达系统100)的一部分。
角度控制器204可以被配置为控制粗略角度控制元件200的一个或多个光偏转性质以定义经偏转光的偏转角。角度控制器204可以被配置为将粗略角度控制元件200置于操作状态中以提供分配的偏转角。
角度控制器204可以被配置为向粗略角度控制元件200提供(例如供应)控制信号(例如控制电压)以便将粗略角度控制元件200置于操作状态中(例如,分配给控制信号)。例如,角度控制器204可以被配置为向粗略角度控制元件200提供多个控制信号中的一个控制信号,以将粗略角度控制元件200置于多个操作状态中的一个操作状态中。
角度控制器204可以被配置为向粗略角度控制元件200提供第一控制信号S1以定义第一偏转角(例如,以照亮视野202的第一块202-1),如图2C和图2D所示。角度控制器204可以被配置为向粗略角度控制器200提供第二控制信号S2以定义第二偏转角(例如,以照亮视野202的第二块202-2),如图2E和图2F所示。
在图2C至图2F中,角度控制器204被示为向粗略角度控制元件200提供控制信号以照亮视野202的不同区段。应当理解,在从视野202接收(并且例如偏转到检测器上)的光的情况下,可以执行类似的过程。
根据各种实施方案,角度控制器204可以被配置为控制粗略角度控制元件以在相应时间段(也称为角度控制时间段)内提供偏转角。角度控制器204可以被配置为控制粗略角度控制元件以在多个相应角度控制时间段内(例如,顺序地)提供多个偏转角,例如,以便顺序地照亮视野102的不同块。
角度控制器204可以被配置为控制粗略角度控制元件200,使得所述粗略角度控制元件在第一角度控制时间段内提供经偏转光的第一偏转角(例如,以便照亮视野202的第一块202-1);参见例如图2D。角度控制器204可以被配置为控制粗略角度控制元件200,使得所述粗略角度控制元件在第二角度控制时间段内提供经偏转光的第二偏转角(例如,以便照亮视野202的第二块202-2);参见例如图2F。例如,第二角度控制时间段可以在第二角度控制时间段之后(并且之后可以为具有另外的偏转角的另外的角度控制时间段)。举例来说,角度控制器204可以控制粗略角度控制元件使得块被顺序地照亮。块被照亮的顺序可以对应于任何期望的照明样式。例如,可以沿着同一列或同一行顺序地照亮块。若所述元件是或具有LCPG,则可以以减少(例如,最小化)液晶中缓慢转变的数量的方式来照亮块。
角度控制器204的操作可以与光发射(例如,光发射控制器(例如,激光雷达系统100的光发射控制器118)的操作)一致,如下文更详细地论述的。角度控制器204可以被配置为在分配给当前操作状态的视野的块已经被完全照亮(例如,由激光雷达系统100的每个子光源112)之后改变粗略角度控制元件200的操作状态(以及偏转角)。换句话说,粗略角度控制元件(例如,LCPG)仅在所有子光源(例如,激光二极管)已经连续照亮整个块至少一次时才切换到下一个块。
粗略角度控制元件200可以具有至少一个(例如,可切换)液晶元件。例如,液晶元件可以具有液晶分子层,其布置在例如玻璃基板上的两个电极(例如,两个ITO电极)之间。
在各个方面,粗略角度控制元件200可以具有多个液晶元件。每个液晶元件可以定义相应的部分偏转角,如下文将更详细地说明的。粗略角度控制元件200的偏转角可以由多个部分偏转角的组合(例如,总和)定义。
粗略角度控制元件200可以具有λ/4-片,其布置在(第一)液晶元件的上游,以便将线偏振光转换成圆偏振光。
粗略角度控制元件200(例如,至少一个液晶元件)可以是或具有液晶偏振光栅(例如,可切换向列液晶偏振光栅,例如,具有可光聚合的聚合物)。液晶偏振光栅的光栅周期可以定义偏转角。
液晶可以周期性地极化并且具有由液晶分子的取向限定的光栅结构。液晶分子的排列可以定义(例如,控制或改变)传播通过液晶偏振光栅的光的偏转角。液晶偏振光栅可以被布置为根据光栅周期并根据入射光的偏振在三个可能方向(在不同的方面,具有三个可能偏转角)上偏转或透射光。
在第一操作状态下,如果没有电压(例如,控制电压)施加到液晶偏振光栅,则根据入射光的偏振(例如,根据偏振状态,例如右旋圆偏振或左旋圆偏振)在第一方向上或在第二方向上偏转所述入射光。以第一偏转角或以第二偏转角(例如,相对于光栅的光轴与第一偏转角相反)偏转光。在这种情况下,输出光的偏振也反转为相反的正交偏振(例如,从右旋圆偏振到左旋圆偏振,或反之亦然)。在第二操作模式下,在施加电压时,光栅周期(在一些方面,光栅面形)被抑制并且允许入射光基本上不变地穿过(例如,以具有基本上为0°的值的第三偏转角)。
角度控制器204可以被配置为控制液晶偏振光栅。角度控制器204可以被配置为向液晶偏振光栅提供控制信号(例如,电压,例如,而非DC电压)以控制液晶分子的取向(例如,液晶偏振光栅的一个或多个光栅性质)。
例如,角度控制器204可以被配置为在第一角度时间段内向液晶偏振光栅提供第一控制信号(例如,第一控制电压),以便定义液晶偏振光栅的第一光栅周期(例如,光栅周期的存在)。例如,角度控制器204可以被配置为在第二角度时间段内向液晶偏振光栅提供第二控制信号(例如,第二控制电压),以便定义液晶偏振光栅的第二光栅周期(例如,光栅周期的不存在)。作为示例,第一控制电压可以具有0V的值,使得相应的光栅性质可以根据光的偏振提供(第一或第二)偏转角。作为另一示例,第二控制电压的值可以大于第一控制电压的值,以便抑制光栅周期,从而允许光不变地穿过光栅。
举例来说,角度控制器204可以控制液晶偏振光栅的光栅周期以提供各种偏转角。
在一些方面,液晶偏振光栅可以具有多个液晶偏振光栅。每个液晶偏振光栅可以被配置为分别在三个方向上偏转光。每个液晶偏振光栅既可以加上偏转角又可以减去偏转角,这可以提供较大范围的角度。因此,可能的偏转角的数量可以取决于液晶偏振光栅的数量。在这种配置中,控制电压可以具有施加到多个液晶偏振光栅以单独控制其光栅性质的多个控制电压。
根据各种实施方案,粗略角度控制元件200可以具有液晶层和偏振光栅。液晶层可以按其定义传播通过液晶层的光的偏振的方式进行布置。液晶分子的排列定义(例如,改变)传播通过液晶层的光的偏振。清楚地说,液晶层可以被配置为可切换偏振选择器,例如可切换半波片。液晶层可以具有其不改变光的偏振的第一状态和其反转光的偏振(例如,从右旋圆偏振到左旋圆偏振,或反之亦然)的第二状态。偏振光栅可以被配置为基于光的偏振来定义光的偏转角。
角度控制器204可以被配置为在第一角度控制时间段内向液晶层提供第一控制信号(例如,第一控制电压,例如0V)以便定义传播通过液晶层的光的第一偏振(换句话说,以便将液晶层置于第一状态中)。角度控制器204可以被配置为在第二角度控制时间段内向液晶层提供第二控制信号(例如,第二控制电压,例如大于第一控制电压)以便定义传播通过液晶层的光的第二偏振(换句话说,以便将液晶层置于第二状态中)。
因此,偏振光栅可以基于第一偏振在第一角度控制时间段内对光提供第一偏转角,并基于第二偏振在第二角度控制时间段内对光提供第二偏转角。
根据各种实施方案,粗略角度控制元件200可以具有多个液晶层和/或具有多个偏振光栅(例如,一个接一个地堆叠或层压)以便增大可能偏转角的范围(以与上文针对液晶偏振光栅所描述的类似的方式)。
可以通过液晶元件的设计来选择块的数量和水平和竖直角度延伸(也称为角度范围)。块的数量可以与液晶层的数量(例如,可控(可切换)层的数量)成比例。仅作为数值示例,液晶元件可以被布置为提供多于20个块,例如多于30个块,例如多于50个块。块的最大数量可由液晶元件的切换时间(例如,液晶偏振光栅切换时间)限制。
图3A至图3C各自以示意图示出了根据各种实施方案的光源300。光源300可以是用于激光雷达系统的光源,例如,光源110可以是激光雷达系统100的光源。
光源300可以具有多个子光源302(例如,激光雷达系统100的子光源112)。可以在一个方向上(例如,彼此相邻地)布置多个子光源302中的子光源302。
子光源302可以布置在竖直方向上(见图3A)或布置在水平方向上(见图3B)。在各个方面,子光源302可以布置在与光源300的光轴(例如,与激光雷达系统的光轴)形成90°以外的角度的方向上。如图3C中举例所示,子光源302可以布置在如与光轴成45°的方向上。
多个子光源302可以具有任意数量的子光源302,例如8个子光源、16个子光源或32个子光源。子光源302的数量可以决定子光源302在其上布置的方向上的分辨率。作为示例,若在竖直方向上布置八个子光源302,则子光源302发射光进入其中的视野的区段304(诸如图3D所示)可以具有八个子区段306。每个子区段306可以由相应的光源302照亮。如果区段304在水平方向上具有15°的角度延伸并在竖直方向上具有2.5°的角度延伸,则每个子光源302可以照亮在水平方向上具有15°的角度延伸并在竖直方向上具有0.31°的角度延伸的子区段306。举例来说,每个子光源302可以在垂直于子光源302在其上布置的方向的方向上完全照亮区段304。每个子光源302可以在子光源302在其上布置的方向上照亮子区段306。
举例来说,子区段306可被理解为由相应的子光源302照亮的像素。如果视野在竖直方向上被分成8个块并且每个块被分成8个子区段306,则可以指定64个像素,这仅作为数值示例。
光源300(例如至少一个子光源302,例如每个子光源302)可以被配置为发射可见和/或红外波长范围的光。例如,光源300可以被配置为发射波长范围从约700nm到约2000nm(例如波长为905nm或1550nm)的光。
光源300可以具有至少一个激光光源。例如,子光源302可以具有至少一个激光光源(例如,每个子光源可以是或具有激光光源)。
至少一个激光光源可以具有激光二极管。作为示例,至少一个激光二极管可以是边缘发射激光二极管或装置侧发光二极管。
光源300(例如,至少一个激光光源)可以具有激光棒。举例来说,子光源302可以是激光棒的激光二极管。例如,激光棒的快轴可以沿着子光源302在其上布置的方向进行对准。仅作为数值示例,激光棒可以具有在水平方向上大小为0.1mm且在竖直方向大小为0.48mm的有效区域。
如图3E、图3F、图3G和图3H所示,光源300可以是光发射系统310的一部分(例如,光发射系统310可以是激光雷达系统100的光发射系统)。
光发射系统310可以具有控制光源300(例如,多个子光源302)的光发射控制器312。光发射控制器312可以是激光雷达系统100的光发射控制器118的示例。
光发射控制器312可以被配置为控制多个子光源302使得子光源302顺序地发射光(例如,各自在相应的发射时间段内进行发射)。举例来说,操作模式可以使得只有单个子光源302(例如,单个激光二极管)发出脉冲并照亮条带(例如,子区段,例如在水平方向上)。由检测器(例如,一行检测器)获取所述条带内的空间分辨率,如将参考图4A至图4E更详细地说明的。
光发射控制器312可以被配置为按以下方式控制第一子光源和第二子光源:第一子光源在第一发射时间段(例如,分配给第一子光源)内发射光并且第二子光源在第二发射时间段(例如,分配给第二子光源)内发射光。第二发射时间段可以在第一发射时间段之后(例如,紧接在第一发射时间段之后,其间没有另外的发射时间段)。
光发射控制器312可以按以下方式进行配置:在子光源302已经在光发射控制器控制下一个子光源302发射光之前发射光之后(例如,在第一子光源已经在光发射控制器控制第二子光源发射光之前发射光之后),所述光发射控制器等待某个等待时间。相继发射时间段之间(例如,第一发射时间段与第二发射时间段之间)的等待时间可以等于或大于发射光的最大传输时间(例如,大于其中包含光发射系统的激光雷达系统(诸如激光雷达系统100)的最大传输时间)。
最大传输时间可以被计算为:2*d
光发射控制器312可以被配置为根据激光雷达系统的角度控制器(例如,角度控制器204)来控制子光源302。
光发射控制器312可以被配置为控制子光源302,使得每个子光源302针对由激光雷达系统的粗略角度控制元件(例如,由粗略角度控制元件118)提供的每个偏转角发射光。例如,可以控制每个子光源302以在由角度控制器定义的角度控制时间段内发射光。作为示例,光发射控制器312可以被配置为控制子光源302,使得每个子光源302在第一角度控制时间段内的相应发射时间段内发射光,并且每个子光源302在第二角度控制时间段内的相应发射时间段内发射光。
光发射系统310可以具有光学阵列(例如,光学阵列透射器314),如图3F至图3H所示。光学阵列透射器314可以布置在光源300的下游,例如,在光源300与视野之间。例如,光学阵列透射器314可以布置在光源300与粗略角度控制元件(例如,粗略角度控制元件118)之间以将来自光源300的光引导(例如,聚焦或准直)到粗略角度控制元件。光学阵列透射器314可以具有一个或多个透镜,诸如一个或多个准直器透镜(也称为准直透镜)。
光学阵列透射器314可以具有第一准直器透镜316(例如,第一柱面透镜)以将由光源300发射的光准直到视野上(例如,到粗略角度控制元件上)。例如,第一准直器透镜316可以是慢轴准直器透镜,以便在光源300的慢轴方向上准直发射光。作为数值示例,第一准直器透镜316可以具有约44mm的焦距。
第一准直器透镜316可以准直光,使得准直的光在光被第一准直器透镜316准直的方向上仅填充视野的块的子区段。例如,第一准直器透镜316可以将光束扩展减小到所需的(例如,水平)角度(例如,7.5°)。
光学阵列透射器314可以具有第二准直器透镜318(例如,第二柱面透镜)。第二准直器透镜318可以布置在光源300与第一准直器透镜316之间,以便将从光源300发射的光准直到第一准直器透镜316上。例如,第二准直器透镜318可以是在光源300的快轴方向上准直发射光的快轴准直器透镜。第二准直器透镜318可以被配置用于光束整形。作为数值示例,第二准直器透镜318可以具有约38μm的焦距。
可以理解,第一准直器透镜316和第二准直器透镜318的焦距可以根据光源300的大小(例如激光棒的有效区域的宽度)来选择(例如,调节)。
光学阵列透射器314可以具有多透镜阵列320,如图3G(对于在竖直方向上布置的子光源,诸如四个激光二极管)和图3H(对于在水平方向上布置的子光源)所示。多透镜阵列可以被配置为混合由多个子光源中的每个子光源发射的光。多透镜阵列320可以布置在第一准直器透镜316的下游,例如,在第一准直器透镜316与粗略角度控制元件(例如,粗略角度控制元件118)之间。
多透镜阵列320可以具有区域结构(如插图322所示),例如多个区域(例如,第一区域320-1和第二区域320-2)。多透镜阵列320可以造成从子光源302发射的光的强(换句话说,清晰)分离。区域结构可以布置在多个子光源302在其上布置的方向上(例如,在图3G中的竖直方向上或在图3H中的水平方向上)。多透镜阵列320可以使虚拟源大小增大并且因此提供提高的眼睛安全性,例如当在红外范围内发射光时。
图4A至图4C各自以示意图示出了检测器400。检测器400可以是用于激光雷达系统的检测器,例如,检测器104可以是来自激光雷达系统100。检测器400可以被配置为检测来自视野(例如,来自激光雷达系统的视野)的光。检测器400可以具有多个检测器像素402(例如,激光雷达系统100的检测器像素106)。可以在一个方向上(例如,并排)布置多个检测器像素402中的检测器像素402。
检测器像素402可以布置在水平方向(参见图4A)或竖直方向(参见图4B)上。检测器像素402可以布置在与检测器400的光轴(例如,与激光雷达系统的光轴)形成90°以外的角度的方向上。如图4C中举例所示,检测器像素402可以布置在与光轴成45°的方向上。多个检测器像素402可以具有任意数量的检测器像素402,例如64个检测器像素或128个检测器像素。
检测器400的大小可对应于检测器400从其检测光的视野(诸如图4D中所示)的块404的大小。仅作为数值示例,检测器400(例如,1×64像素APD阵列)可以具有2.5mm×15mm的尺寸,其对应于测量水平15°×竖直2.5°的块404(也称为单元)。举例来说,检测器400可以具有与块404(例如,类似于LCPG单元)相同的纵横比。
检测器像素402的数量可以决定检测器像素402在其上布置的方向上的分辨率。作为数值示例,在水平方向上布置64个检测器像素402的情况下(例如,在64像素APD阵列中),每个检测器像素402可以水平地映射15°宽的块404的1/64并竖直地映射块404的整个2.5°。举例来说,每个检测器像素402可以检测来自块404的子区段406的光。在这种配置中可实现约0.23°的水平分辨率。如果使用128个检测器像素402(例如,在128像素APD阵列中),则可以增大分辨率。
检测器400可以具有多个检测器(例如,子检测器)。例如,可以使用多个检测器来检测来自视野的光。检测器可以并排布置,例如,每个检测器可以被分配给视野的相应列或行(以便检测来自相应列或行的光)。仅作为示例,检测器400可以具有七个检测器,其中每个检测器具有64个检测器像素,使得可以使用448个像素来检测光(在水平或竖直方向上)。
检测器400(例如,检测器像素402)可以具有至少一个光电二极管。例如,至少一个(例如,每个)检测器像素402可以具有光电二极管或耦合到相应的光电二极管。例如,至少一个光电二极管可以是雪崩光电二极管,例如单光子雪崩光电二极管。例如,检测器400可以是或具有APD行或SPAD行。举例来说,检测器400可以是或具有多像素单光子雪崩光电二极管。
光学阵列接收器408可用于将视野映射到检测器400上,如图4E所示。接收器光学器件可以按如下方式进行设计:整个视野被映射到检测器400上(例如,映射到APD行上)。例如,光学阵列接收器408可以按其将视野的相应子区段映射到检测器像素402(例如,被分配到子区段)的方式进行配置。例如,光学阵列接收器408可以布置在检测器400与激光雷达系统的粗略角度控制元件(例如,粗略角度控制元件118)之间。光学阵列接收器408可以具有一个或多个透镜(例如,一个或多个聚焦透镜)。在图4E的示例性配置中,光学阵列接收器408可以具有将光聚焦到检测器400上(例如,在竖直方向和水平方向上)的透镜410。透镜410可以在水平方向和竖直方向上具有相等的焦距,例如57mm。
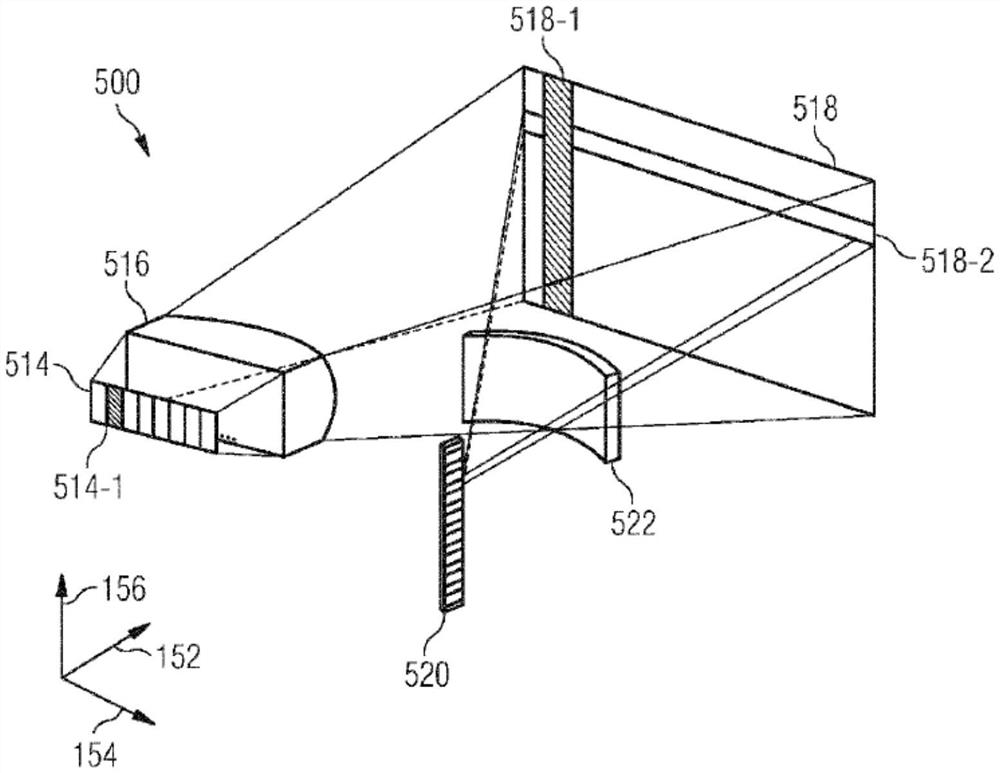
图5A、图5B和图5C各自以示意图示出了激光雷达系统500。激光雷达系统500可以是激光雷达系统100的示例性实施方式。在图5B和图5C中发射器侧示出了仅一个光学元件(例如,多透镜阵列),但可以理解,也可以存在其他光学元件(例如,慢轴准直器透镜和/或快轴准直器透镜)。
在图5A的示例性配置中,激光雷达系统500可以在接收器侧具有检测器502。检测器可以具有例如在水平方向上布置的64个检测器像素(例如,64个通道),例如具有64个雪崩光电二极管的阵列。激光雷达系统500还可以在接收器侧具有接收器光学器件504,例如,透镜(例如,聚焦透镜),以将光引导(例如,聚焦)到检测器502上。激光雷达系统500可以在发射器侧具有激光模块506,例如具有在竖直方向上布置的8个激光二极管的激光棒。激光雷达系统500可以具有发射光学器件以便准直由激光模块506发射的光。例如,激光雷达系统500可以具有第一准直器透镜508(例如,快轴准直器透镜)和第二准直器透镜510(例如,慢轴准直器透镜)。激光雷达系统500可以具有位于角度控制级处的粗略角度控制元件512,诸如液晶偏振光栅。仅作为数值示例,液晶偏振光栅可以具有约50mm的水平方向大小(例如,宽度)和约50mm的竖直方向大小(例如,高度)。
在图5B中的示例性配置中,激光雷达系统500可以在接收器侧具有检测器514,例如,具有在水平方向上布置的32个或64个检测器像素(例如,32个或64个雪崩光电二极管)的1D检测器行。激光雷达系统500还可以在接收器侧具有接收器光学器件516,以将光引导到检测器514上。接收器光学器件516可以按以下方式进行配置:来自块518(例如,LCPG块)的光被映射到检测器514上。块518的子区段(其沿水平方向布置)由接收器光学器件516映射到相应的检测器像素上。例如,条带式子区段518-1可以被映射到条带式检测器像素514-1上(例如,映射到APD单元上)。块518可以例如在水平方向上具有7.5°的角度延伸并在竖直方向上具有4°的角度延伸。激光雷达系统500可以在发射器侧具有激光模块520,例如,具有在竖直方向上布置的16个激光二极管的激光棒(例如,16折激光棒)(例如,1D发射器列)。激光雷达系统500可以具有将由激光模块520发射的光引导到视野中的多透镜阵列522。多透镜阵列522可以被配置为使得来自激光模块520的每个激光二极管的光照亮块518的相应子区段(在沿竖直方向布置的子区段之中)(例如,子区段518-2)。
图5C中的激光雷达系统500可以具有图5B中的配置颠倒的系统的相同部件。在图5C的配置中,检测器可以具有在竖直方向上布置的514个检测器像素。激光模块520(以及多透镜阵列522)可以布置在水平方向上。块518的子区段的布置可以相应地颠倒。块518可以例如在水平方向上具有4°的角度延伸并在竖直方向上具有6°的角度延伸。
激光雷达系统500还可以在发射器侧具有慢轴准直器透镜和快轴准直器透镜,例如,如图3G、图3H和图5A所示布置,为了清楚起见,在图5B和图5C中未示出慢轴准直器透镜和快轴准直器透镜。
附图标记列表
激光雷达系统 100
视野 102
检测器 104
检测器像素 106
光轴 108
光源 110
子光源 112
粗略角度控制元件 114
块 116
第一块 116-1
第二块 116-2
光发射控制器 118
方向 152
方向 154
方向 156
粗略角度控制元件 200
视野 202
第一块 202-1
第二块 202-2
角度控制器 204
光源 300
子光源 302
视野块 304
子区段 306
光发射系统 310
光发射控制器 312
光学阵列透射器 314
准直器透镜 316
准直器透镜 318
多透镜阵列 320
区域 320-1
区域 320-2
插图 322
检测器 400
检测器像素 402
视野块 404
子区段 406
接收器光学器件阵列 408
透镜 410
激光雷达系统 500
检测器 502
接收器光学器件 504
激光模块 506
准直器透镜 508
准直器透镜 510
粗略角度控制元件 512
检测器 514
检测器像素 514-1
接收器光学器件 516
块 518
子区段 518-1
子区段 518-2
激光棒 520
多透镜阵列 522
控制信号 S1
控制信号 S2
- 扫描角度调整装置、激光雷达系统、载具及自动校正方法
- 自动驾驶系统、激光雷达及其转动角度检测控制结构
- 一种带角度计数功能的电子锁专用减速器及其控制系统