平衡障碍康复机器人
文献发布时间:2023-06-19 19:14:59
技术领域
本发明涉及机器人、医疗康复及医疗器械等技术领域,具体地说,是一种面向平衡功能障碍患者的站立位及步行平衡障碍康复机器人。
背景技术
平衡功能障碍常见于脑卒中、帕金森病、前庭功能损伤、关节灵活度和软组织柔韧度下降、中枢神经系统功能障碍、视觉损伤、肌无力等患者。平衡功能障碍患者日常的步行、上下楼梯等尚且困难,而实际生活环境地形更为复杂,故平衡功能障碍会给患者生活带来极大不便。而且平衡功能障碍多发于老年群体,平衡能力变差可能会增加跌倒的风险,而跌倒是老年人意外死亡的一大诱因。因此科学、有效的平衡功能训练,帮助患者恢复平衡能力,对保护患者生命安全、增强患者生活自理能力、提高患者生活质量有极大帮助。
目前,针对康复后期患者的站立位及步态平衡训练,主要是依靠治疗师或患者家属的运动辅助,由于治疗师数量太少、辅助运动的劳动强度太大且康复情况借由量表形式评估,常常存在训练频次不足、训练一致性差、康复效果难以准确量化等问题,使得平衡训练效果难以尽如人意;同时,平衡能力康复训练基本都是在原地进行,难以模拟出平路步行、爬楼梯、走斜坡等环境。近年来,研究人员提出了将机器人应用于模拟实地环境以供患者平衡训练的方案,以部分代替实地平衡能力康复训练。
现有的站立位平衡训练仪通常是一个安装了压力传感器的万向平台,患者站在平台上,通过绘制患者重心轨迹来判定患者平衡能力;站立位平衡训练仪只能用于站立位平衡训练,可运动范围较小,无法实现运动环境下的模拟;而步行平衡训练系统往往是一长条铺满压力传感器的走廊,其原理与站立位平衡训练仪相似。但其占地面积大、造价昂贵,无法模拟患者例如走台阶、走斜坡等情况,更无法采集患者做此类运动时的数据。
发明内容
本发明的目的是提供一种功能多,占地少,成本低,可模拟平路、楼梯、坑地、沙地等场景,便于收集患者在训练过程中的训练数据的平衡障碍康复机器人。
本发明是这样实现的:
包括左侧水平运动装置100a、右侧水平运动装置100b、台阶200、步宽调节装置300和扶手400,左侧壳体100a和右侧壳体100b对称安装在台阶200两侧,扶手400安装在左右壳体前方,壳体内有水平运动装置100、升降装置120,步宽调节装置300放置在左右升降装置120下,可调节左右侧水平运动装置间距,水平运动装置100与升降装置120通过驱动平台102连接在一起,水平运动装置100安装在升降装置120顶部,水平运动装置包括驱动箱101、驱动平台102、平台竖板129、滑轨103、测距传感器104、压力传感器105、踏板106、下连接短杆107与踏板106的长侧边固定连接,踏板106与滑轨103滑动配合,驱动箱101的第1轴上有第1齿轮114分别与双齿轮摆动短杆112的下端第3轴上固定连接的第3齿轮112-3单齿轮摆动短杆110的下端第2轴固定连接的第2齿轮110-2啮合,双齿轮摆动短杆112的上端固定连接的第5齿轮112-1的第5轴与上连接短杆111左端、双齿轮摆动短杆112的上端铰接,无齿轮摆动长杆109的上端通过第5轴分别与上连接短杆111左端铰接,无齿轮摆动长杆109的下端与下连接短杆107铰接,单齿轮摆动长杆108上端固定连接的第4齿轮108-1的第4轴分别与单齿轮摆动短杆110的上端和上连接短杆111右端铰接,单齿轮摆动长杆108下端与下连接短杆107铰接,第2、3轴分别与齿轮固定支架113铰接,驱动箱101、齿轮固定支架113位于驱动平台102上,平台竖板129位于齿轮固定支架113下,滑轨103安装于平台竖板129上,底座127上的铰座141与电动缸126的下端铰接,底座127侧边上有第1、2立杆140,第1、2滑杆架124分别位于电动缸126左右侧,第1、2滑杆架124的上下端分别的第1、2滑杆131的一端固定连接,第1、2滑杆131的另一端分别与第1、2套筒123滑动配合,第1、2滑杆架124的上端分别与第1、2伞杆121的一端铰接,滑杆架124的下端分别与第3、4伞杆的一端铰接,第1、3伞杆121的另一端分别与驱动平台102铰接,第2、4伞杆的另一端分别与立杆140铰接,第1套筒123的两侧分别与第1、2撑杆122的一端铰接,第1、2撑杆122的另一端分别与第1、2伞杆121铰接,第2套筒的两侧分别与第3、4撑杆122的一端铰接,第3、4撑杆122的另一端分别与第3、4伞杆121铰接,电动缸126的上端的电动缸推杆上有孔,销轴125穿过两第3伞杆121的中间孔、电动缸推杆上的孔,将电动缸推杆与两第3伞杆121传动连接。
单齿轮摆动短杆110、双齿轮摆动短杆112与齿轮固定支架113及上连接短杆111组成一个平行四边形四杆机构,单齿轮摆动长杆108、无齿轮摆动长杆109与上连接短杆111、下连接短杆107组成一个平行四边形四杆机构。
通过调整第1、2齿轮的传动比和单齿轮摆动长杆108、单齿轮摆动短杆110的长度比使得下连接短杆的运动轨迹为直线。
单齿轮摆动长杆108、单齿轮摆动短杆110的长度比为2比1、第1、2齿轮的齿数比为26比18。
台阶200在左右底座127之间,方便患者登上训练装置,步宽调节装置300放置在平衡训练装置底部底座127之下,调节两侧平衡训练装置的间距。
所述步宽调节装置300包括导轨302、导轨滑块301、齿轮305、底板303、作动器306以及齿条304,滑轨滑块301安装在单侧平衡训练装置的底部底座127的四个角上,所述两根导轨302平行放置在平衡训练装置底座127下方并与底板303固定连接,滑块301可在导轨302上来回滑动,底板303与地面连接,在整个机器最底层,底板中轴线上有第6、7、8轴孔、安装第6、7、8轴和第6、7、8轴承,所述第6、7、8齿轮305分别安装在第6、7、8轴上且两侧第6、8齿轮与中心第7齿轮啮合,第1、2齿条304与导轨302平行安装,第1、2齿条304分别固定在左右平衡训练装置的底座127上,并分别与第6、8齿轮啮合,第1、2齿条304相互平行,分别带左右平衡训练装置相对靠近或远离移动、以实现左右平衡训练装置间距调整。
测距传感器104安装在滑轨103上、压力传感器105安装在踏板106,通过计算机采集系统收集患者在训练过程中的脚的压力和移动距离的数据,从而进一步分析患者的步态及康复情况。
本发明的有益效果主要表现在:
1、该平衡障碍康复机器人通过竖直升降运动和水平运动的叠加实现竖直平面一定范围内任意点可达。通过两个任一点可达的踏板可模拟平路、楼梯、坑地、沙地等场景,导入专家系统后,可模拟出许多平衡训练场景,从而应用于患者康复训练。
2、平衡障碍康复机器人安装了足底压力采集系统。足底压力采集系统的采集部分安装在踏板上,便于收集患者在训练过程中的训练数据,从而进一步分析患者的步态及康复情况。
附图说明
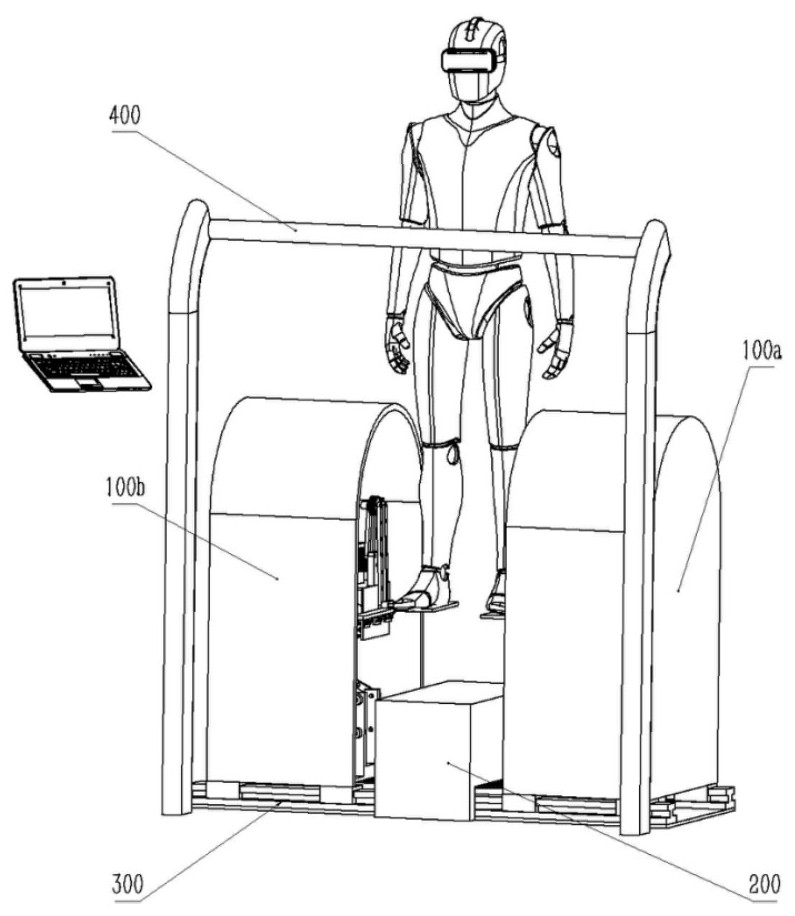
图1是本发明的总体结构示意图。
图2是本发明隐去外壳的单侧训练装置示意图。
图3是本发明的水平运动装置示意图。
图4是本发明的水平运动装置细节图。
图5是本发明的升降装置示意图。
图6是图4中的单个竖直直线运动机构示意图。
图7是本发明的步宽调节装置示意图。
图中,100a-左侧壳体,200-台阶,100b-右侧壳体,300步宽调节装置,400-扶手,100-水平运动装置,120-升降装置,101-水平运动作动器,102-运动平台,103-滑轨,104-测距传感器,105-压力传感器,106-踏板,107-下连接短杆,108-单齿轮摆动长杆,109-无齿轮摆动长杆,110-单齿轮摆动短杆,111-上连接短杆,112-双齿轮摆动短杆,113-齿轮固定支架,114-小圆柱齿轮,121-伞杆,122-撑杆,123-套筒,124-滑杆架,125-销轴,126-电动缸,127-底座,301-导轨滑块,302-导轨,303-底板,304-齿条,305-小齿轮,306-步宽调节电机。
具体实施方式
包括左侧水平运动装置100a、右侧壳体装置100b、台阶200、步宽调节装置300和扶手400,左侧壳体100a和右侧壳体100b对称安装在台阶200两侧,扶手400安装在左右壳体前方,壳体内有水平运动装置100、升降装置120,步宽调节装置300放置在左右升降装置120下,可调节左右侧水平运动装置间距,水平运动装置100与升降装置120通过驱动平台102连接在一起,水平运动装置100安装在升降装置120顶部,水平运动装置包括驱动箱101、驱动平台102、平台竖板129、滑轨103、测距传感器104、压力传感器105、踏板106、下连接短杆107与踏板106的长侧边固定连接,踏板106与滑轨103滑动配合,驱动箱101的第1轴上有第1齿轮114分别与双齿轮摆动短杆112的下端第3轴上固定连接的第3齿轮112-3、单齿轮摆动短杆110的下端第2轴固定连接的第2齿轮110-2啮合,双齿轮摆动短杆112的上端固定连接的第5齿轮112-1的第5轴与上连接短杆111左端、双齿轮摆动短杆112的上端铰接,无齿轮摆动长杆109的上端通过第5轴分别与上连接短杆111左端铰接,无齿轮摆动长杆109的下端与端下连接短杆107铰接,单齿轮摆动长杆108上端固定连接的第4齿轮108-1的第4轴分别与单齿轮摆动短杆110的上端和上连接短杆111右端铰接,单齿轮摆动长杆108下端与下连接短杆107铰接,第2、3轴分别与齿轮固定支架113铰接,驱动箱101、齿轮固定支架113位于驱动平台102上,平台竖板129位于齿轮固定支架113下,滑轨103安装于平台竖板129上,底座127上的铰座141与电动缸126的下端铰接,底座127侧边上有第1、2立杆140,第1、2滑杆架124分别位于电动缸126左右侧,滑杆架124的上下端分别的第1、2滑杆131的一端固定连接,第1、2滑杆131的另一端分别与第1、2套筒123滑动配合,第1、2滑杆架124的上端分别与第1、2伞杆121的一端铰接,第1、2滑杆架124的下端分别与第3、4伞杆的一端铰接,第1、3伞杆121的另一端分别与驱动平台102铰接,第2、4伞杆的另一端分别与立杆140铰接,第1套筒123的两侧分别与第1、2撑杆122的一端铰接,第1、2撑杆122的另一端分别与第1、2伞杆121铰接,第2套筒的两侧分别与第3、4撑杆122的一端铰接,第3、4撑杆122的另一端分别与第3、4伞杆121铰接,电动缸126的上端的电动缸推杆上有孔,销轴125穿过两第3伞杆121的中间孔、电动缸推杆上的孔,将电动缸推杆与两第3伞杆121传动连接。
单齿轮摆动短杆110、双齿轮摆动短杆112与齿轮固定支架113及上连接短杆111组成一个平行四边形四杆机构,单齿轮摆动长杆108、无齿轮摆动长杆109与上连接短杆111、下连接短杆107组成一个平行四边形四杆机构。
通过调整第1、2齿轮的传动比和单齿轮摆动长杆108、单齿轮摆动短杆110的长度比使得下连接短杆的运动轨迹为直线。
单齿轮摆动长杆108、单齿轮摆动短杆110的长度比为2比1、第1、2齿轮的齿数比为26比18。
台阶200在左右底座127之间,方便患者登上训练装置,步宽调节装置300放置在平衡训练装置底部底座127之下,调节两侧平衡训练装置的间距。
所述步宽调节装置300包括导轨302、导轨滑块301、齿轮305、底板303、作动器306以及齿条304,滑轨滑块301安装在单侧平衡训练装置的底部底座127的四个角上,所述两根导轨302平行放置在平衡训练装置底座127下方并与底板303固定连接,滑块301可在导轨302上来回滑动,底板303与地面连接,在整个机器最底层,底板中轴线上有第6、7、8轴孔、安装第6、7、8轴和第6、7、8轴承,所述第6、7、8齿轮305分别安装在第6、7、8轴上且两侧第6、8齿轮与中心第7齿轮啮合,第1、2齿条304与导轨302平行安装,第1、2齿条304分别固定在左右平衡训练装置的底座127上,并分别与第6、8齿轮啮合,第1、2齿条304相互平行,分别带左右平衡训练装置相对靠近或远离移动、以实现左右平衡训练装置间距调整。
测距传感器104安装在滑轨103上、压力传感器105安装在踏板106,通过计算机采集系统收集患者在训练过程中的脚的压力和移动距离的数据,从而进一步分析患者的步态及康复情况。
本发明的技术构思为:升降连杆机构包括升降连杆组和升降作动器。所述升降连杆组由一对完全相同的竖直直线运动机构组成。所述竖直直线运动机构包括两个横放并联的“伞”状结构,两个“伞”状机构并联以加强稳定性。固定住“伞”状机构的一端,即升降机构的底端,则另一端可实现无导轨情况下的直线运动。再将两个竖直直线运动机构并联成为升降连杆组,以加强运动稳定性。所述“伞”状运动机构包括两根完全相同的伞杆、两根完全相同的撑杆、套筒及滑杆组成。所述两根伞杆中间分别与两根撑杆铰连接,两根伞杆端部铰接,撑杆另一端铰接在套筒两侧,套筒在滑杆上滑动。整体组成一个横放的“伞”字。将两个“伞”状结构并联时合并为一个零件滑杆架,同时两根伞杆端部也改为在分布在滑杆架两侧、穿过滑杆架的孔后再铰接。
升降连杆机构的核心部分为升降连杆组。升降连杆组为并联的横置“伞”状结构,由角平分线上的点到角两端的距离相等以及三角形相似的原理可证明“伞”状结构滑杆两侧组成的三角形在运动的任何位置均全等,故当一端固定时另一端可沿直线上下移动。将其并联后即可实现运动平台的升降运动。
水平运动机构其核心为相互啮合的大小齿轮,当齿轮传动比与摆动长短杆的比例满足一定数学关系的时候,可实现摆动长杆的摆动角度与摆动短杆的摆动角度相抵消,从而使得摆动长杆下端的下连接短杆一直保持水平直线运动。
下面结合附图对本发明作进一步描述。
参照图1,一种平衡障碍康复机器人,包括左侧壳体100a、右侧壳体100b、台阶200、步宽调节装置300和扶手400。左侧壳体100a和右侧壳体100b对称安装在台阶200两侧,扶手400安装在左右侧壳体前方。
参照图2、图3及图4,水平运动装置100与升降装置120通过运动平台102连接在一起,水平运动装置100安装在升降装置120顶部。水平运动装置包括水平运动作动器101、运动平台102、滑轨103、测距传感器104、压力传感器105、踏板106、下连接短杆107、单齿轮摆动长杆108、无齿轮摆动长杆109、单齿轮摆动短杆110、上连接短杆111、双齿轮摆动短杆112、齿轮固定支架113和小圆柱齿轮114。水平运动作动器101和齿轮固定支架113固定在运动平台102上,输出轴与小圆柱齿轮114相连,小圆柱齿轮114与单齿轮摆动短杆110以及双齿轮摆动短杆112的一侧齿轮分别啮合,并且三个齿轮转轴都固定在齿轮固定支架113上。单齿轮摆动短杆110与双齿轮摆动短杆112的另一端通过上连接短杆111相连,并与上连接短杆111铰接,与齿轮固定支架113构成平行四边形。单齿轮摆动短杆110与双齿轮摆动短杆112的另一面分别于单齿轮摆动长杆108和无齿轮摆动长杆109铰接,单齿轮摆动长杆108和无齿轮摆动短杆109和下连接短杆107的两端分别铰接,也构成一个平行四边形。踏板106固定在下连接短杆上,与下连接短杆一起沿着导轨103做直线运动。
参照图5及图6,升降装置包括8根伞杆121、8根撑杆122、4个套筒123、两个滑杆架124、销轴125、电动缸126和底座127。升降装置由两组相同的竖直直线运动机构实现升降。竖直直线运动机构包括两个横放的“伞”状结构,两个“伞”状机构并联以加强稳定性。单个“伞”状机构由两根伞杆121、两根撑杆122、一个套筒123与滑杆架124组成。撑杆122铰接在伞杆121中间,两根伞杆121在端部与滑杆架124铰接。撑杆122另一端与套筒123铰接,套筒123套在滑杆架124的滑杆上,可沿滑杆滑动。整体组成一个横置的“伞”字。电动缸126推杆通过鱼眼与销轴125铰接,底部通过轴承座与底座127铰接。销轴125插在两根最低的伞杆121中部的孔上,可在孔内转动。
参照图7,步宽调节装置300包括导轨滑块301、导轨302、底板303、齿条304、小齿轮305、步宽调节电机306。两条导轨302平行安装在底板303上,导轨滑块301放置在导轨302上可沿导轨滑动。底板303中轴线上有三个轴孔,三根轴安装在轴孔上,轴上安装了小齿轮305,齿条304与齿轮啮合,通过螺钉分别安装在平衡训练装置100a和100b的底部,同时与导轨平行。
本实施例的工作过程是:使用该平衡障碍康复机器人进行训练时,按照以下的步骤进行操作:1)患者通过台阶踏上踏板;2)患者扶住扶手,穿戴安全保障设备;3)患者戴上虚拟现实眼镜并按照所设定的路径进行平衡训练。
使用该平衡障碍康复机器人可以进行各种环境例如平路、楼梯、沙地、坑地等场景的平衡训练。训练过程中可以通过足底压力采集系统采集患者运动数据以评估患者的平衡调节能力。
本说明书的实施例所述的内容仅仅是对发明构思的实现形式的列举,仅作说明用途。本发明的保护范围不应当被视为仅限于本实施例所陈述的具体形式,本发明的保护范围也及于本领域的普通技术人员根据本发明构思所能想到的等同技术手段。
- 一种平衡障碍患者康复机器人
- 一种虚实场景融合的平衡障碍康复机器人