一种用于将支柱附接到船的船体的装置
文献发布时间:2023-06-19 19:16:40
技术领域
本发明涉及一种在第一项权利要求的前序部分中所述类型的用于将支柱附接到船的船体上的装置。
具体而言,本发明涉及一种附接装置,该附接装置构造成联接到船体的任何区域,例如罩、舷缘或者甚至船尾平台,以便例如提供可移除的护栏。
背景技术
众所周知,几乎所有的小型或中型船都包括护栏,即船的周边部分,与护栏相对应的是被称为支柱的金属杆,该金属杆通过一根或多根被张紧放置的称为滑道的金属缆绳连接。
通常,滑道至少在它们的端部连接支柱处以及此外在沿着支柱本身的延伸方向布置的一个或多个中间点处连接支柱。
此外,支柱通常通过可解的约束(例如,如螺栓或其他类似的约束工具)被约束到船体的边缘。
在传统构造中,船体的边缘可能具有树脂、玻璃或钢护墙,这些护墙几乎从未达到足够的高度来保证足够的安全性。
可选地,船体的边缘具有空腔,支柱本身的基部的至少一部分容纳在该空腔内。可选地,支柱插入可变材料(例如金属、树脂或碳)的销中,该销通常在下端是中空的,该销在由船的舷缘限定的边缘突出15cm至25cm的长度。插在销上的支柱然后用普通纹路锁定到销本身上。
这样制成的护栏基本上为船上的使用者限定了支撑舱壁,从而增加了他们的安全性,并防止船上的人甚至物体在航行阶段容易在没有任何障碍的情况下从船上被抛出。
然而,并不是所有的船都设计成能容纳上述的支柱。例如,摩托艇很少设计成沿着船体的周边安装支柱。
因此,已知技术的支柱的约束系统不适用于任何船。
然而,在专利申请US-B-6607054和EP-A-2415501中描述的一些连接装置是已知的。
这些申请描述了包括多个管状元件的装置,每个管状元件装备有吸盘系统,该吸盘系统构造成允许根据命令与钩挂表面连接,从而形成栏杆,例如护栏。
特别地,文献US-B-6607054描述了这种装置在诸如飞机或船之类的运输工具上的使用,而文献EP-A-2415501详细描述了一种具有特殊灵活性的装置,以允许栏杆适应任何类型的表面。
所描述的已知技术包括一些重要的缺点。
特别是,这些装置不能获得足够的安全性,因为它们完全基于由吸盘限定的约束阻力。
当吸盘装置承受高负荷时,它们实际上可能会有脱离的危险,从而导致装置局部失效。
此外,在任何情况下,该约束都不能提供任何冗余装置,并且如果吸盘发生不希望的断裂或脱离,该装置就变得绝对不安全,并且实际上非常危险,因为至少在外观上,栏杆可以是完全完好的。
发明内容
在这种情况下,本发明的技术任务是设计一种用于将支柱附接到船的船体上的装置,该装置能够基本上消除至少部分上述缺点。
在所述技术任务的范围内,本发明的一个重要目的是获得一种用于将支柱附接到船的船体的装置,该装置非常耐用。
此外,特别地,本发明的另一个目的是提供一种引入冗余装置的连接装置,从而总是保持高度的安全性。
本发明的另一个重要目的是提供一种通用的附接装置,面对相同的结构,该附接装置可以有效地连接到船的船体的任何部分,例如连接到发动机罩、舷缘、船尾平台或其他部分。
通过如所附权利要求1所述的用于将支柱附接到船的船体的装置来实现技术任务和特定目的。
从属权利要求中强调了优选的技术方案。
附图说明
参考附图,通过对本发明优选实施例的详细描述,本发明的特征和优点将在下面得到阐明,其中:
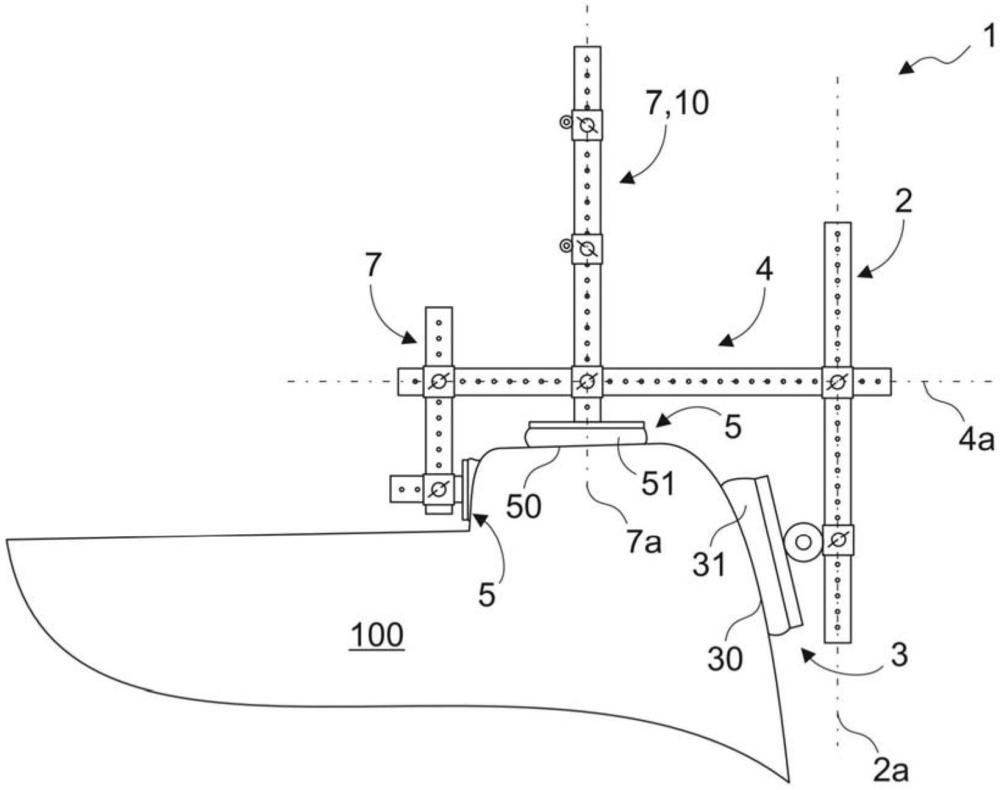
图1示出了在第一实施例中根据本发明的用于将支柱附接到船的船体的装置;
图2示出了在第二实施例中根据本发明的用于将支柱附接到船的船体的装置;
图3a是在第三实施例中根据本发明的用于将支柱附接到船的船体的装置,其中臂相互垂直;
图3b示出了图3a的装置,其中臂彼此相对旋转,使得其中一个臂平行于船的船体;
图4示出了根据本发明的用于将支柱攻击到船的船体的装置的臂的连接装置的细节;
图5示出了在第四实施例中根据本发明的用于将支柱攻击到船的船体的装置;
图6是在可选实施例中根据本发明的用于将支柱攻击到船的船体的装置,其中臂是一体的,并且该装置安装在舷缘上;
图7表示安装在船尾平台上的图6的装置;
图8示出了船,根据本发明的用于将支柱附接到船的船体的装置安装在该船上;
图9示出了在可选实施例中根据本发明的用于将支柱附接到船的船体的装置,其中臂包括座,以允许支柱的受控定位;
图10是在第五实施例中根据本发明的用于将支柱附接到船的船体的装置,其中约束装置包括借助于控制装置的可控电磁元件;和
图11示出了根据本发明的用于将支柱附接到船的船体的装置,其中第二约束装置通过曲柄装置刚性地约束到第三臂,因此它们可以沿着垂直于第三延伸方向的方向移动。
具体实施方式
在本文件中,当与诸如“大约”或诸如“大致”或“基本上”的其它类似术语相关联时,测量值、数值、形状和几何基准(例如垂直度和平行度)被认为是除了由于生产和/或制造误差导致的测量误差或不准确性之外,并且最重要的是,除了与其相关联的数值、测量值、形状或几何基准的轻微偏离之外。例如,如果与数值相关联,这些术语优选地表示不超过该数值的10%的偏差。
此外,在使用时,诸如“第一”、“第二”、“较高”、“较低”、“主要”和“次要”等术语不一定表示顺序、关系的优先顺序或相对位置,而是可以简单地用于清楚地区分它们的不同组成部分。
除非另有说明,作为以下讨论的结果,诸如“处理”、“运算”、“确定”、“计算”等术语是指计算机或类似的电子计算装置的动作和/或过程,其操纵和/或转换表示为物理量的数据,例如计算机系统的寄存器和/或存储器中的电子量,类似地表示为计算机系统、寄存器或其他存储、传输或信息显示装置中的物理量的其他数据。
除非另有说明,本文中报告的测量值和数据应被认为是在国际标准大气(International Standard Atmosphere)ICAO(ISO 2533:1975)中进行的。
参照附图,根据本发明的用于将支柱附接到船的船体的装置整体用数字1表示。
装置1适于安装在任何船上。例如,船可以是帆型的,或者也可以是机动的(例如摩托艇或类似物)。
特别地,装置1适于附接到船体100的一部分。
众所周知,船体100是赋予浮力的船的结构。它通常表现为一种固体,其纵向尺寸相对于其他尺寸占优势:宽度通常在中心区域较大,并因此在末端处减小。
因此,船体100通常限定两个互连的横舱壁,这两个横舱壁界定了船。
此外,船体100可以确定船典型的一些特定元件的存在与否。船体100可以包括罩101和/或一个或多个舷缘102和/或一个或多个船尾平台103。
罩101是船体100的上部,其可以构造为覆盖船的一部分。
舷缘102基本上是由船体的上端限定的侧面或边缘,并且其在周界上界定了船的可行走区域。
船尾平台103或浴桥(bathing bridge)是平台,其通常布置在船的船尾区域,主要适于方便进入和离开水,因为它通常位于水的自由表面附近。
装置1还构造成允许一个或多个支柱10被附接到船体100上。
支柱10基本上是桩、管状或实心的,与船的周边区域相对应地受到约束,例如约束在臂102上。因此,实质上,支柱10是从边缘突出或者以有序的方式布置在边缘本身上的元件。
总的来说,支柱10可以形成护栏。现有技术中已知的护栏是屏障,通常最大高度为90cm,这限制了使用者被抛出船外的可能性。
为了制造护栏,支柱10优选地沿其延伸方向设置有适于允许滑道通过的狭槽。滑道由高强度缆索组成,该缆索通常连续连接栏杆的支柱10。每个滑道通常是张紧的,并且可以包括钢材料。
此外,滑道通常容纳在布置在支柱10的自由端的槽中,但是如已经提到的,它同样可以放置在支柱10的延伸的其他点中。因此,护栏可以包括一个或多个滑道,该滑道在一个支柱10和另一个支柱之间连续延伸,但是沿着支柱10的不同延伸点放置。
通常,实质上,滑道是以垂直于支柱10的方式连续连接到支柱10的平行缆索,使得护栏基本上限定了用于船的栏杆或扶手。
装置1还可以包括支柱10,或者可以构造成允许支柱10约束在其自身上。
在任何情况下,装置1基本上包括至少第一臂2。
第一臂2可以是杆或板或管状元件,例如空心梁。
第一臂2因此限定了至少第一延伸方向2a。
第一延伸方向2a是第一臂2主要延伸的方向。
第一臂2优选地但不是必须地是管状元件,其包括沿着第一延伸方向2a布置的多个孔。
此外,这些孔可以排列成一排,也可以排列成几排。因此,它们可以以有序的方式沿着延伸方向2a和沿着它们自己的排分布。
如果第一臂2是具有方形基部的中空梁,则孔可以分布成四排,每排沿着梁的侧面布置,梁沿着延伸方向2a延伸。
此外,孔可以是通孔的或非通孔的。如果没有贯通,孔以这样的方式布置,以允许形成第一气密臂2,该第一气密臂2可以限定空气储存器。
装置1还包括第一约束装置3。
第一约束装置3基本上是允许约束装置1和船体100之间的适当集成的元件。该约束优选是可解的。
第一约束装置3因此连接到第一臂2。
更详细地,优选地,第一约束装置3以柔性(compliant)的方式约束到第一臂2。
特别地,第一约束装置3可以以柔性的方式约束到第一臂2,使得第一臂2相对于第一约束装置3围绕至少一个轴可旋转。例如,可以用具有垂直于第一延伸方向2a定向的轴的机械铰链来进行约束。
可选地,约束可以更加柔性,并且允许第一约束装置3相对于第一臂2相对于几个轴的往复旋转。在这种意义上,例如,可以用球形铰链进行约束。
或者,可以提供可变形的连接元件,例如弹性体,并且第一约束装置3和第一臂2之间的相对旋转可以通过可弹性变形的结构实现,甚至可能是部分塑性的,例如无轴承类型的。
第一约束装置3因此限定了第一约束表面30。
第一约束表面30基本上是第一约束装置3的一部分,其构造成布置成与船体100的一部分接触。
优选地,第一约束表面30相对于第一延伸方向2a可倾斜。特别地,由于如前所述的约束元件,例如机械铰链或其他类似元件,它可以倾斜。
此外,第一约束表面30可以不同的方式制成。
例如,它可以由第一膜31制成。因此,第一约束装置3可以包括第一膜31。
第一膜31(如果存在的话)优选是弹性的。因此,第一膜31能够与船体100接触,产生足够的摩擦并避免磨损(例如擦伤船体100)。
自然地,约束表面30也可以由实心元件制成,可以是金属的,并且可以限定滚花以增加第一约束装置3和船体100之间的摩擦。然而,至少为了保持原始船体100的美观,优选的是,约束表面30由较软的元件制成,或者在任何情况下都是可变形的,像第一膜31一样。
可选地,第一约束表面30可以由第一吸盘32的边缘制成。
因此,第一约束装置3可以包括第一吸盘32。
因此,第一约束表面30表现为由第一吸盘32的周边隔板确定的平环。
因此,第一吸盘32可以是手动类型的,并且当置于来自外部的压力下时能够约束到船体100上,以此方式锁定到船体100本身上。
可选地,第一吸盘32可以由外部元件控制和/或也可以提供控制元件,例如阀或类似物。
优选地,装备有第一吸盘32的装置1包括加压装置8。
加压装置8优选可操作地连接到第一吸盘32。特别地,它们构造成根据命令对吸盘32和船体之间的空间进行减压,从而将吸盘32限制在船体100上。
合适的加压装置8可以是例如普通泵,其基本上适于从吸盘32和船体100之间受到限制的空间中移除空气,并在它们之间产生真空。
加压装置8也可以包括第一臂2的一部分,例如当第一臂2用作储气罐时。加压装置8实际上能够让存在于第一吸盘32和船体100之间的空间中的空气流出,并使其在第一臂2内流动。在这种情况下,加压装置8将基本上集成在装置1中。
此外,第一约束装置3可以包括至少一个第一电磁元件33。
第一电磁元件33可以是例如电磁体。更详细地,第一电磁元件33可以是外部涂覆有可变形膜的电磁体,使得电磁元件容易适应任何表面。
在这种情况下,第一约束表面30因此可以由磁体的表面或者由膜的表面限定。
具体而言,第一电磁元件33可以是能够根据命令以电子方式激活的装置,以产生能够借助于所产生的磁引力在装置1(具体而言是第一约束装置3)和船体100之间进行约束的吸引磁场。
因此,装置1也可以包括控制装置9。
控制装置9优选可操作地连接到第一电磁元件33。此外,它们构造成允许控制第一电磁元件33。
因此,控制装置可以是电子控制装置,其具有借助于电池的自主电源或者非自主电源(也就是说,例如借助于布线的外部),该自主电源或非自主电源适于允许通过第一电磁元件33的命令来致动。
控制装置9还可以包括简单的开关,该开关可以从装置1的外部操作,能够允许产生磁力以将第一紧固装置3锁定在船体100上。
磁力基本上是第一电磁元件53和船体100之间的相互吸引力。
此外,控制装置9可以包括一个或多个电池,并且后者可以容纳在至少第一臂2内。
有利地,装置1还包括第二臂4。
第二臂4优选与第一臂2相似或相同类型。它也可以与第一臂2相同。
因此,第二臂4也可以是杆或板或管状元件,例如空心梁。
第二臂4因此限定了至少第二延伸方向4a。
第二延伸方向4a是第二臂4主要延伸的方向。
优选地,在至少一种使用构型中,第二延伸方向4a相对于第一延伸方向2a是横向的。详细地,第二延伸方向4a可以相对于第一延伸方向2a垂直或简单地入射或偏斜。
在至少一种使用构型中,第二延伸方向4a横向于第一延伸方向2a的事实并不意味着第二延伸方向4a和第一延伸方向2a不能彼此平行。
第二臂4优选地但不是必须地是管状元件,其包括沿着第二延伸方向4a布置的多个孔。
此外,这些孔可以排列成一排,也可以排列成几排。因此,它们可以以有序的方式沿着第二延伸方向4a和沿着它们自己的排分布。
如果第二臂4是具有方形基部的中空梁,则孔可以分布成四排,每排沿着梁的侧面布置,梁沿着第二延伸方向4a延伸。
这些孔也可以是通孔或非通孔。如果没有贯通,孔以这样的方式布置,以允许形成第二气密臂4,该第二气密臂4可以限定储气罐。
特别地,优选地,第二臂4连接到第一臂2。
更详细地,第二臂4和第一臂2优选通过连接装置6相互约束。
连接装置6构造成以柔性的方式约束第一臂2和第二臂4,使得延伸方向2a、4a相互偏斜,并且臂2、4相互可旋转。
换句话说,连接装置6允许确定延伸方向2a、4a之间的相互定向。
这种连接装置6可以包括例如一对滑块60。
滑块60可以是能够安装在第一臂2和第二臂4上的环形元件。
滑块60因此可以与臂2、4形状相反。此外,滑块60通过连接装置相互连接。例如,该连接可以是机械铰链。可选地,连接器可以包括齿轮,该齿轮适于允许两个滑块60的相互定向的快速调节。
在任何情况下,滑块60都可以相对于旋转轴6a相互旋转。
旋转轴6a优选垂直于两个延伸方向2a、4a。旋转轴6a允许滑块60往复旋转,使得延伸方向2a、4a之间的相互定向可以改变。
当然,连接器限定了旋转轴6a。
每个滑块60也可以通过联接装置61锁定在相应的臂2、4上。
联接装置61可以是简单的螺纹螺钉,其可以从外部控制并适于利用设置在滑块60本身和臂2、4上的孔。
自然地,可以使用其它连接装置61,例如转动件(cursors)内部的衬里,并且适于局部增加臂2、4和滑块60之间的摩擦。然而,这种装置在现有技术中是众所周知的。
作为整体,连接装置6也可以由简单地适于允许两个细长元件(例如臂2、4)的连接以及它们根据命令的相互旋转的任何等同装置代替。
在装置1的简化实施例中,连接装置6也可以是非柔性的。因此,可以实现一套不同的连接装置6,以允许具有不同延伸方向2a、4a倾角的臂2、4的连接。
有利地,在任何情况下,装置1还包括第二约束装置5。
第二约束装置5连接到第二臂4。
在这个意义上,它们可以直接连接,即被约束到第二臂4,或者它们可以间接连接到第二臂4,如在下文中更好地说明的。
事实上,装置1还可以包括第三臂7。
第三臂7(如果存在的话)可以与臂2、4相似或类型相同。它也可以与臂2、4相同。
因此,第三臂7也可以是杆或板或管状元件,例如空心梁。
因此,第三臂7限定了至少第三延伸方向7a。
第三延伸方向7a是第三臂7主要延伸的方向。
优选地,在至少一种使用构型中,第三延伸方向7a相对于第二延伸方向4a是横向的。详细地,第三延伸方向7a可以相对于第二延伸方向4a垂直或简单地入射或偏斜。
在至少一种使用构型中,第三延伸方向7a横向于第二延伸方向4a的事实并不意味着第三延伸方向7a和第二延伸方向4a不能彼此平行。
第三臂7优选地但非必须地是管状元件,该管状元件包括沿着第二延伸方向7a布置的多个孔。
此外,这些孔可以排列成一排,也可以排列成几排。因此,它们可以沿着第三延伸方向7a和沿着它们自己的排以有序的方式分布。
如图1至3b所示,如果第三臂7是具有方形基部的中空梁,则孔可以分布成四排,每排沿着梁的侧面布置,梁沿着第三延伸方向7a延伸。
此外,孔可以是通孔的或通孔的。如果没有贯通,孔以这样的方式布置,以允许形成第三气密臂7,该第三气密臂7可以限定储气罐。
第三臂7也可以是简单的连接器,例如杆,如图6至7所示,适于将第二约束装置5与第二臂4连接。
优选地,如果存在的话,第三臂7构造成相互连接第二臂4和第二约束装置5。
此外,第三臂7能够以柔性的方式被约束到第二臂4,使得第三臂7能够相对于第二臂4旋转或者被固定。
此外,第三臂7能够以柔性的方式约束到第二臂4,使得能够根据命令沿着第二延伸方向4a平移。
第二约束装置5基本上类似于第一紧固装置3。因此,它们可以采用前述的不同构造。
因此,第二约束装置5基本上是允许约束装置1和船体100之间的适当集成的元件。该约束优选可以是可解的。
第二约束装置5可以以柔性的方式约束到第二臂4。或者,优选地,它们可以以柔性的方式约束到第三臂7。这样,第二约束装置5可以相对于第二臂4或第三臂7围绕至少一个轴旋转。例如,可以用具有垂直于第二延伸方向4a和/或第三延伸方向7a定向的轴的机械铰链来进行约束。
可选地,约束可以更加柔性,并且允许第二约束装置5相对于第二臂4或第三臂7相对于几个轴往复旋转。在这种意义上,例如,可以用球形铰链进行约束。
或者,可以提供可变形的连接元件(例如弹性体),并且第二约束装置5和第二臂4或第三臂7之间的相对旋转可以由可弹性变形的结构制成,甚至可能是部分塑性的,例如无轴承类型的。
第二约束装置5因此限定了第二约束表面50。
第二约束表面50基本上是第二约束装置5的一部分,其构造成布置成与船体100的一部分接触。
优选地,根据第二约束装置5和第二臂4之间的连接方式,第二约束表面50相对于第二延伸方向4a或第三延伸方向7a可倾斜。特别地,由于如上所述的约束元件(例如机械铰链或其他类似元件),其可以倾斜。
此外,第二约束表面50也可以以不同的方式实现。例如,它可以由第二膜51制成。因此,第二约束装置5可以包括第二膜51。
如果存在的话,第二膜51优选是弹性的。因此,第二膜51能够与船体100接触,产生足够的摩擦并避免磨损(例如擦伤船体100)。
自然地,第二约束表面50也可以由实心元件制成,该实心元件可以是金属的并且可以限定滚花以增加第二约束装置5和船体100之间的摩擦。然而,至少为了保持原始船体100的美观,优选的是,第二约束表面50由较软的或者在任何情况下可变形的元件(例如第二膜51)制成。
可选地,第二约束表面50可以由第二吸盘52的边缘制成。
因此,第二约束装置5可以包括第二吸盘52。
因此,第二约束表面50表现为由第二吸盘52的周边隔板确定的平环。
因此,第二吸盘52可以是手动类型的,并且当被置于来自外部的压力下时能够约束到船体100,以此方式锁定到船体100本身上。
可选地,第二吸盘32可以由外部元件控制和/或也可以提供控制元件,例如阀或类似物。
优选地,装备有第二吸盘52的装置1还包括加压装置8。
加压装置8也可以可操作地连接到或者仅连接到第二吸盘52。特别地,它们构造成根据命令对第二吸盘52和船体100之间所包括的空间进行减压,从而将第二吸盘52限制在船体100上。
加压装置8也可以包括第二臂4的一部分,例如当第二臂4用作储气罐时。加压装置8实际上可以适于让存在于第二吸盘52和船体100之间的空间中的空气流出,并使其流入第二臂4中。在这种情况下,加压装置8将基本上集成在装置1中。
第二约束装置5还可以包括至少第二电磁元件53。
第二电磁元件53可以是例如电磁体。
更详细地,第二电磁体53可以是外部涂覆有可变形膜的电磁体,使得电磁元件容易适应任何表面。
在这种情况下,第二约束表面50因此可以由磁体的表面或者由膜的表面限定。
具体而言,第二电磁元件53可以是能够根据命令以电子方式激活的装置,以产生能够借助于所产生的磁引力在装置1(尤其是第一约束装置3)和船体100之间进行约束的吸引磁场。
因此,控制装置9也可以可操作地连接到第二电磁元件53,并构造成允许控制第二电磁元件53。
在这种情况下,第二控制装置9也优选为电子控制装置,具有自主或非自主电源(或者更确切地说,例如外部直通线路),该自主或非自主电源构造成允许第二电磁元件53根据命令运行。
控制装置9还可以包括可从装置1的外部操作的简单开关,该开关设计成允许产生磁力a以将第一约束装置3锁定在船体100上。
磁力基本上是第二电磁元件53和船体100之间的相互吸引力。
此外,控制装置9可以包括一个或多个电池,并且后者可以容纳在至少第二臂4内或者甚至第三臂7内。
因此,支柱10可以约束到从臂2、4中选择的一个或多个。
或者,支柱10可以是臂2、4之间的一种选择的一部分。因此,约束装置3、5构造用于以这样的方式将装置1一体地约束到船体100:当支柱10约束到选自臂2、4之间的一个或多个臂或其一部分时,支柱10约束到船体100。
例如,如图5所示,支柱10可以是第一臂2的一部分。
或者,支柱10可以是第三臂7的一部分,因此,第三臂7的一部分可以构成支柱10,如图1至3b所示。
在这些情况下,第三臂7可以提供环形结构的约束,基本上类似于滑块60,其约束在沿着第三延伸方向7a的某些点上,并且可以包括用于容纳滑道的槽。
此外,这种环形结构可以允许限制并因此支撑加压装置8(如图2和5所示)或者也可以支撑控制装置9(如图10所示)。
此外,第一臂2和第二臂4可以是一个整体,并提供框架,支柱10可以约束在该框架上。如图6至7所示,框架可以限定孔,在该孔中容纳和锁定常规的支柱10。
特别地,由于纹理,支柱10可以沿着对应于任何孔的任何臂2、4、7被约束。因此,支柱10可以沿着延伸方向2a、4a、7a限定的任何点被约束。
或者,例如在图6至7的实施例中,第一臂2和/或第二臂4可以包括一个或多个第一座20和/或第二座40。
这些座20、40可以同时包括在装置1中,例如以增加装置1的多功能性,或者可以仅存在第一座20或第二座40。
在任何情况下,如果存在的话,第一座20允许支柱10以可解的方式被约束,使得它可以沿着第一延伸方向2a移动或平移,而第二座40允许支柱10以可解的方式被约束,使得它可以沿着第二延伸方向4a移动或平移。
此外,第一座20在数量方面可以是一个,或者第一臂2可以包括几个第一座20。因此,第一座20可以沿着第一延伸方向2a连续布置,或者沿着垂直于第一延伸方向2a的方向并排布置,以允许支柱10在装置1上垂直于第一延伸方向2a的运动。
第二座40在数量方面也可以是一个,或者第二臂4可以包括更多的第二座40。因此,第二座40可以沿着第二延伸方向4a连续布置,或者沿着垂直于第二延伸方向4a的方向并排布置,以允许支柱10在装置1上垂直于第二延伸方向4a运动。
自然地,第三臂7也可以包括用于可能的支柱10的座,并且管状的臂2、4、7也可以在任何情况下包括与孔一起的座或者适于连接孔本身的座。
此外,装置1可以包括几个臂2、4、7,例如成对的,以增加整体结构的强度。
此外,如图1至2所示,装置1可以包括其它辅助臂和其它辅助约束装置,适于允许锁定在船体100的其它附加区域。
任何辅助臂和辅助约束装置可以分别具有与如前所述的臂2、4、7和约束装置3、5相似的特征。例如,如图1至2详细所示,辅助臂可以对应于另一个第三臂7,辅助约束装置可以对应于另一个第二约束装置5。
使用前述结构术语的情况下,用于将支柱附接到船的船体上的装置1的操作如下。
基本上,约束装置3、5布置成与船体100的一部分接触,例如是罩101、舷缘102或船尾平台103。同样由于臂2、4、7的布置,约束装置3、5允许将装置1刚性地约束到船体100,例如通过限定如图1至2和6至7所示的夹具结构,或者通过限定如图3a至3b和5所示的稳定地放置在船体100上的结构。
因此,可以使用加压装置8或控制装置9将约束装置3、5限制在船体部分100上,或者在具有膜31、51的实施例中,可以使第三臂7靠近第一臂2,在第二臂4上平移第三臂7,从而通过摩擦将船体100的一部分限制在约束装置3、5之间。
臂2、4还允许通过利用连接装置6来实现任何结构形状。
根据本发明的用于将支柱附接到船的船体的装置1实现了重要的优点。
事实上,当如图6至7所示制造时,装置1首先限定了非常耐用和坚固的结构,但不仅如此。
装置1在附接系统中引入了冗余装置和功能部件(features),以保证高锁定效率,并因此保证通过利用连续布置的多个装置1制成的护栏的高安全性。
此外,附接装置非常通用,适用于船体100的任何区域和任何类型的船。
事实上,如已经解释的,面向相同结构的装置1可以有效地连接到船体的任何部分。
本发明容许落入由权利要求限定的发明概念的范围内的变型。
例如,如先前所预期的,在至少一种构造中,第一臂2和第二臂4可以定向成使得第一延伸方向4a和第二延伸方向7a彼此平行。因此,约束装置3、5可以分别包括第一吸盘32和第二吸盘52,或者第一电磁元件33和第二电磁元件53,并且装置1可以允许将支柱10附接在臂2、4之一上,从而允许支柱限制在任何平坦或低弯曲的表面上。
总之,约束装置3、5可以通过适于允许臂2、4、7和约束装置3、5之间相对平移的曲柄装置刚性地紧固到第一臂2或第二臂4或第三臂7,例如如图11所示。例如,在图11的装置1中,第二约束装置5构造成相对于第三臂7沿着垂直于第三延伸方向7a的方向平移。另一方面,约束装置3、5可以刚性地约束到曲柄机构,使得第一或第二约束表面30、50垂直于平移方向,或者甚至使得它们相对于平移方向倾斜。
在这种情况下,所有的细节可以由等同的元件代替,并且材料、形状和尺寸可以是任意的。
- 用于将医疗装置附接到对象的装置和方法
- 一种用于驱动船体上动力系统的氢动力发电装置及方法
- 一种用于LNG船CM节点处90°角焊缝密性检测的真空装置
- 一种用于LNG船CM节点处45°角焊缝的密性检测真空装置
- 用于将医疗器械附接到组织的附接装置、用于将医疗器械附接到组织的系统、具有附接装置的医疗器械、将医疗器械附接到组织的方法以及制造附接装置的方法
- 用于将支柱附接到车架的装置和包括该装置的车辆