机器人及其电量计算方法
文献发布时间:2023-06-19 19:23:34
技术领域
本申请涉及机器人技术领域,尤其涉及一种机器人及其电量计算方法。
背景技术
随着社会的发展,人工智能机器人技术得到了飞速的发展,机器人广泛应用在各行各业中。目前,通常使用电压进行电量计算来确定机器人的当前电量,在实际使用中,由于升压或者降压可能会导致电压波动较大,使得根据电压计算出来的电量并不准确,进而会对机器人根据电量进行的电机控制、载重限制和自动回充控制等操作造成很大的不稳定性。
发明内容
为此,本申请提供一种机器人及其电量计算方法,以解决上述技术问题。
本申请第一方面提供一种机器人的电量计算方法,所述方法包括:
通过电阻分压电路获取电池电压;
根据电流检测电路中的负载电阻及所述负载电阻的分压确定电池电流,其中,电池电流=负载电阻的分压/负载电阻;
基于所述电池电压与所述电池电流计算得到电池当前电量。
本申请第二方面提供一种机器人,所述机器人包括处理器与存储器,所述存储器存储有计算机程序,所述计算机程序供所述处理器调用后执行上述的机器人的电量计算方法。
本申请第三方面提供一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序供处理器调用后执行,以实现上述的机器人的电量计算方法。
从而,本申请中,相较仅用电池电压计算电池当前电量而言,本申请基于电池电压与电池电流计算当前电量,可以利用电池电流结合电池电压的方式削弱电压波动对电池电量计算的影响,提高电量计算的准确性,进而使得机器人根据电量进行的电机控制、载重限制和自动回充控制等操作更稳定。
附图说明
为了更清楚地说明本申请的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本申请一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
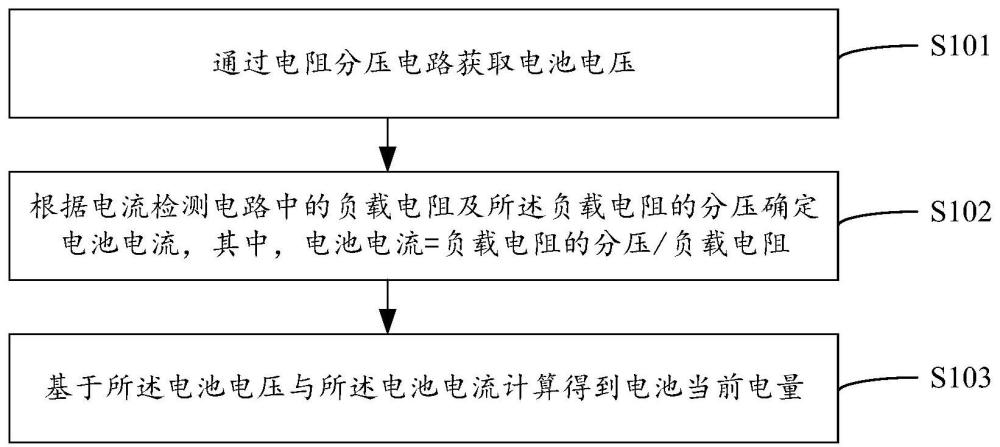
图1为本申请一些实施例提供的机器人的电量计算方法的流程图;
图2为本申请电量计算方法计算电量与现有技术电量计算方法计算电量的对比图;
图3为本申请一些实施方式提供的电阻分压电路示意图;
图4为本申请一些实施方式提供的电流检测电路示意图;
图5为本申请一些实施方式提供的机器人结构框图。
具体实施方式
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
本申请的描述中,除非另有明确的规定和限定,术语“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,也可以是两个元件内部的连通;可以是通讯连接;可以是电连接。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本申请中的具体含义。
请参阅图1,图1为本申请一些实施例提供的机器人的电量计算方法的流程图。
如图1所示,所述机器人的电量计算方法包括:
S101:通过电阻分压电路获取电池电压。
S102:根据电流检测电路中的负载电阻及所述负载电阻的分压确定电池电流,其中,电池电流=负载电阻的分压/负载电阻。
S103:基于所述电池电压与所述电池电流计算得到电池当前电量。
从而,本申请中,相较仅用电池电压计算电池当前电量而言,本申请基于电池电压与电池电流计算当前电量,可以利用电池电流结合电池电压的方式削弱电压波动对电池电量计算的影响,提高电量计算的准确性,(如图2所示,图2中可看出,电池电流波动较小,而电池电压波动较大,本申请中基于电池电流与电池电压计算电池电量相较于现有技术中根据电池电压计算电池电量,得到的电池电量更加稳定),进而使得机器人根据电量进行的电机控制、载重限制和自动回充控制等操作更稳定。
请参阅图3,图3为本申请一些实施方式提供的电阻分压电路示意图。
如图3所示,一些实施方式中,所述电阻分压电路1包括:第一电阻R1、第二电阻R2、第一电容C1与第一电压获取模块10;所述第一电阻R1与所述第二电阻R2连接,且所述第一电阻R1远离所述第二电阻R2的一端还连接电池正极Vc,所述第二电阻R2远离所述第一电阻R1的一端还接地,所述电容C1的一端连接在所述第一电阻R1与所述第二电阻R2之间,另一端接地;所述第一电压获取模块10连接在所述第一电阻R1与所述第二电阻R2之间,所述第一电压获取模块10还连接在所述电容C1的远离接地端的一端上。
一实施例中,所述第一电阻R1=56KΩ(千欧),第二电阻R2=3.3KΩ(千欧),第一电容C1=100nF(纳法),则电池电压=(第一电压获取模块10获取到的电压值/3.3KΩ)*(56.3KΩ+3.3KΩ)。
相比于用专门的电压采集芯片采集电池电压,采用所述电阻分压电路1获取电池电压成本更低,维修售后更简单方便。
请参阅图4,图4为本申请一些实施方式提供的电流检测电路示意图。
如图4所示,一些实施方式中,所述电流检测电路2包括:负载电阻Rs、第三电阻R3、第四电阻R4、第五电阻R5、第六电阻R6、第七电阻R7、放大器Q、第二电容C2与第三电容C3。第三电阻R3连接在公共地GND与第四电阻R4的一端之间,第四电阻R4的另一端与第二电压获取模块20连接,第五电阻R5连接在电池负极V-GND与放大器Q的第一输入端P1之间,所述负载电阻Rs的一端连接在公共地GND与第三电阻R3之间,另一端连接电池负极V-GND与第五电阻R5之间,放大器Q的第二输入端P2连接在第三电阻R3与第四电阻R4之间,放大器Q的输出端P3与第二电压获取模块20连接,放大器Q的负极电源端M与公共地GND连接,放大器Q的正极电源端N与器件内部电压源VDD连接,第三电容C3的一端连接于放大器Q的正极电源端与器件内部电压源VDD之间,另一端与公共地GND连接。第六电阻R6的一端与器件内部电压源VDD连接,另一端连接在第五电阻R5与放大器Q的第一输入端P1之间,第二电容C2一端连接公共地GND,另一端连接于第五电阻R5与放大器Q的第一输入端P1之间并与第六电阻R6的另一端连接,第七电阻R7的一端连接在第五电阻R5与放大器Q的第一输入端P1之间,另一端连接公共地GND,在其他实施例中,所述电流检测电路2也可以不包括第七电阻R7。
一实施例中,负载电阻Rs=4mΩ(毫欧),第三电阻R3=1KΩ,第四电阻R4=10KΩ,第五电阻R5=10KΩ,第六电阻R6=220KΩ,第七电阻R7=2KΩ,放大器Q的放大倍数=(1+第四电阻R4/第三电阻R3)=(1+10)=11,第二电容C2=100nF,第三电容C3=100nF,器件内部电压源VDD=3.3V,则电池电流=第二电压获取模块20获取到的电压/(11*4mΩ)。
相比于电流芯片采集的电流,通过电流检测电路2获取电池电流成本更低,通过放大器Q将信号放大,从而提高了采样精度,使得采集的电流更精准。
一些实施方式中,所述基于所述电池电压与所述电池电流计算得到电池电量,包括:
判断所述电池电流是否大于预设阈值;
当所述电池电流大于或等于所述预设阈值时,根据第一公式来基于所述电池电压与所述电池电流计算得到电池电量;或者
当所述电池电流小于所述预设阈值时,根据第二公式来基于所述电池电压与所述电池电流计算得到电池电量,其中,所述第一公式与所述第二公式不同。
由于在电池电流较小时,电池电压波动范围小,电池电流较大时,电池电压波动范围大,根据电池电流与电池电压确定电池当前电量的计算方式,可以使当前电量的计算准确性更可靠。
可选的,所述预设阈值为1A(安培),需要知道的是,在其他实施例中,所述预设阈值还可以是其他数值,这里不做限制。
一些实施方式中,所述根据第一公式来基于所述电池电压与所述电池电流计算得到电池电量,包括:
根据第一公式:电池当前电量=电池上一时刻电量-(电池电压*电池电流*间隔时间)/电池总容量,计算得到电池当前电量,其中,电池电流是当前时刻的电池电流,电池电压是当前时刻的电池电压,所述间隔时间为上一时刻获取电池电压到当前时刻获取电池电压的间隔时长,其中,所述电池总容量是额定容量。
一些实施方式中,所述根据第二公式来基于所述电池电压计算得到电池电量,其中,所述第一公式与所述第二公式不同,包括:
根据第二公式:电池当前电量=电池上一时刻电量*低通滤波系数+电压电量*(1-低通滤波系数),计算得到所述电池当前电量,其中,所述电压电量为使用电压进行计算得到的电量。
可选的,所述低通滤波系数可以在0.9~0.99之间,一实施例中,所述低通滤波系数为0.95。
可选的,所述电压电量=(电池电压*125-412.5)/100,所述电压电量的计算公式可根据实验曲线进行拟合得到。
可选的,当所述电池电流小于所述预设阈值时且第一次计算电池当前电量时,电池当前电量=电压电量*(1-低通滤波系数)。即,第一次计算电池当前电量时,电池上一时刻电量取值为0。
由于机器人在使用过程中,通常开机时电池电流小于预设阈值,电流再逐渐增大,因此,第一次计算电池当前电量时,选用第二公式,且第二公式中电池上一时刻电量取值为0来进行计算,而不会直接选用第一公式来进行计算。
一些实施方式中,所述通过电阻分压电路获取电池电压,包括:
通过电阻分压电路周期性地获取电池电压;以及
周期性的根据电流检测电路中的电阻及所述电池电压确定电池电流;
所述基于所述电池电压与所述电池电流计算得到电池当前电量,包括:
在每次获取到电池电压与电池电流后,基于当前获取到的所述电池电压与所述电池电流计算得到电池当前电量。
可选的,可以每间隔相同时间,获取一次电池电压以及确定电池电流;比如,每隔1s获取一次电池电压以及确定电池电流,需要理解的是,1s仅为举例,不作为限制。
可选的,也可以间隔第一时间获取一次电池电压以及确定电池电流,间隔第二时间再获取一次电池电压以及确定电池电流,然后以第一时间、第二时间为间隔时间循环获取一次电池电压以及确定电池电流,比如,第二次获取电池电压以及确定电池电流与第一次获取电池电压以及确定电池电流间隔1s,第三次获取电池电压以及确定电池电流与第二次获取电池电压以及确定电池电流间隔2s,第四次获取电池电压以及确定电池电流与第三次获取电池电压以及确定电池电流间隔1s,第五次获取电池电压以及确定电池电流与第四次获取电池电压以及确定电池电流间隔2s,然后不断循环,周期性的获取电池电压以及确定电池电流。
同理,可以类推当前获取电池电压与上一次获取电池电压的间隔时间为(X1、X2、X3、X4、X5……)为一个循环,以周期性的获取电池电压以及确定电池电流。
本申请一些实施例还提供一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序供处理器调用后执行,以实现上述实施例中的机器人的电量计算方法。
请参阅图5,图5为本申请一些实施方式提供的机器人结构框图。
本申请一些实施例还提供一种机器人100,所述机器人100包括处理器30与存储器40,所述存储器40存储有计算机程序,所述计算机程序供所述处理器30调用后执行上述实施例中的机器人的电量计算方法。
例如,所述计算机程序供所述处理器30调用后执行的电量计算方法包括:通过电阻分压电路获取电池电压;根据电流检测电路中的负载电阻及所述负载电阻的分压确定电池电流,其中,电池电流=负载电阻的分压/负载电阻;基于所述电池电压与所述电池电流计算得到电池当前电量。
本申请中,机器人100使用上述实施例中的机器人的电量计算方法,从而基于所述电池电压与所述电池电流计算得到电池当前电量,可以削弱电压波动对电量计算的影响,电量计算的准确性更高。
其中,所述存储器40可以包括:闪存盘、只读存储器、随机存取器、磁盘或光盘等或者其任意组合。所述处理器30可以包括:中央处理器(Central Processing Unit,CPU),通用处理器,数字信号处理器(Digital Signal Processor,DSP),专用集成电路(Application-Specific Integrated Circuit,ASIC),现场可编程门阵列(FieldProgrammable Gate Array,FPGA)或者其他可编程逻辑器件、晶体管逻辑器件、硬件部件或者其任意组合。
以上是本申请实施例的实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本申请实施例原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本申请的保护范围。
- 电量计算方法、电量计算装置、电子设备和存储介质
- 追补电量的计算方法、系统、设备、介质及电量追补装置