一种玻璃体视网膜手术机器人系统、控制方法及终端
文献发布时间:2023-06-19 19:23:34
技术领域
本发明涉及一种主从式机器人系统,具体地,涉及一种玻璃体视网膜手术机器人系统、控制方法及终端。
背景技术
微创玻璃体视网膜手术系统(Micro Incision Vitrectomy System,MIVS)是近十年来治疗眼底视网膜疾病的主要手术方式。新术式的出现降低了手术并发症,改善了手术治疗效果,却对术者操作的精细度、稳定性以及触觉反馈感知力均有非常高的要求,学习曲线长,稍有不慎易导致视网膜医源性损伤,造成视功能不可逆下降,因而严重制约了高水平手术医生培养以及手术效率,造成有限的术者与庞大的患者群体之间的供需矛盾。
申请号为“CN201811532198.2”的中国发明专利提出了一种二自由度末端执行器,虽实现了二自由度的运动,但此种结构设计不够紧凑,增加了执行器整体的长度,且其缺乏机器人系统的设计与控制系统的描述。
另外,申请号为“CN201811487948.9”的中国发明专利提出了一种眼科显微手术辅助机器人,其采用双平行四杆构型的结构实现了不动点功能,但其末端执行器只能实现进给运动,不能实现器械的自转运动,且未实现运动缩放、稳手与眼内运动约束算法于一体的安全控制策略。
发明内容
针对现有技术中的缺陷,本发明的目的是提供一种玻璃体视网膜手术机器人系统、控制方法及终端。
根据本发明的一个方面,提供一种玻璃体视网膜手术机器人系统,包括:
第一机械臂,所述第一机械臂包含至少一个自由度;
第二机械臂,所述第一机械臂与第二机械臂连接,所述第二机械臂包含若干个自由度;
基于所述第一机械臂和第二机械臂,实现所述机器人系统各个自由度解耦并控制手术器械在设定的虚拟不动点处进行运动。
优选地,所述第二机械臂包括:
底座,所述底座的一端与所述第一机械臂连接;
直线驱动机构,所述直线驱动机构设置于所述底座内;
杆件机构,所述杆件机构与所述直线驱动机构连接;
末端执行器,所述末端执行器设置于所述杆件机构的末端,所述直线驱动机构驱动所述杆件机构,带动所述末端执行器运作。
优选地,所述直线驱动机构,包括:
电机,所述电机为驱动源;
电机固定件,所述电机固定件固定于所述底座,所述电机固定件固定所述电机;
丝杠固定件,所述丝杠固定件固定于所述底座;
丝杆,所述丝杆的一端与所述电机加工为一体,一端由所述丝杠固定件固定;
滑台,所属滑台套于所述丝杠;
导轨,所述导轨位于所述丝杆下方,与所述滑台连接。
优选地,所述杆件机构设计为前后一体形式,包括:
驱动杆,驱动杆与所述滑台铰接;
双平行四杆,所述双平行四杆铰接呈W型,其一端铰接于所述底座处,中端与所述驱动杆铰接,另一端夹持所述末端执行器。
优选地,所述末端执行器,包括:
支架,所述支架与所述杆件机构连接;
第一电机,所述第一电机固定于所述支架内,控制手术器械绕自身轴线进行旋转;
第二电机,所述第二电机固定于所述支架顶部,控制所述手术器械进给或退出运动。
优选地,所述末端执行器设有精度机构,所述精度机构包括FBG和OCT光纤,分别用来感知所述手术器械与眼组织的接触力和手术器械尖端的深度信息。
根据本发明的第二个方面,提供一种所述的玻璃体视网膜手术机器人操控方法,包括:
通过软件界面与玻璃体视网膜手术机器人系统进行交互,输入指令并得到第一机械臂和第二机械臂,即从手的视觉和位置的信息反馈;
依据所述输入指令完成机械臂初始化和虚拟不动点定位;
选择操作模式;
后台根据选择的操作模式控制机器人完成相应的操控。
优选地,所述操作模式,包括:
半自主模式,所述软件界面中所有直接对应从手运动的操作按钮均为半自主运动模式;当选择半自主操作模式时,主手运动将被屏蔽,从手运动由软件界面的操作按钮直接对从手机械臂进行控制;
主从模式,从手与主手间的运动遵循映射关系;其中,所述映射关系包括:
主手获取运动增量;
所述运动增量经滤波、运动缩放后得到从手运动变量;
将通过操作空间的运动约束方法对所述从手运动变量进行安全处理;
安全处理后的从手运动变量通过逆运动学计算得到最终的各电机运动增量。
优选地,通过主手反馈的实时位置信号,得到运动增量X
运动增量X
将所述运动增量信号ΔP
将最终预期运动ΔP
根据本发明的第三个方面,提供一种终端,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时执行上述的玻璃体视网膜手术机器人操控方法。
与现有技术相比,本发明具有如下的有益效果:
本发明实施例中的玻璃体视网膜手术机器人系统,可实现绕虚拟远程运动中心(RCM点)四个自由度的运动,从而避免医生在术中对巩膜切口可能造成的撕扯以及其他不安全运动。
本发明实施例中的玻璃体视网膜手术机器人系统,实现了二自由度运动(自转运动和进给/退出运动)的末端执行器,可以实现绕器械自身轴线的自转和沿器械轴线的进给/退出运动。
本发明实施例中的玻璃体视网膜手术机器人系统,实现了位置信息和力信息的传感,从而为医生提供精确导航,感知器械深度和器械与眼组织接触力的大小。
本发明实施例中的玻璃体视网膜手术机器人控制方法,构建了主从式控制系统,医生在机械臂的辅助下手术时常会因为末端抖动而导致手术不稳定,本发明实施例整合了运动缩放和滤波方法,可以实现从手相对于主手的运动缩小,并实现手术稳定,从而提高手术操作精度,降低对医生操作输入的要求。
附图说明
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
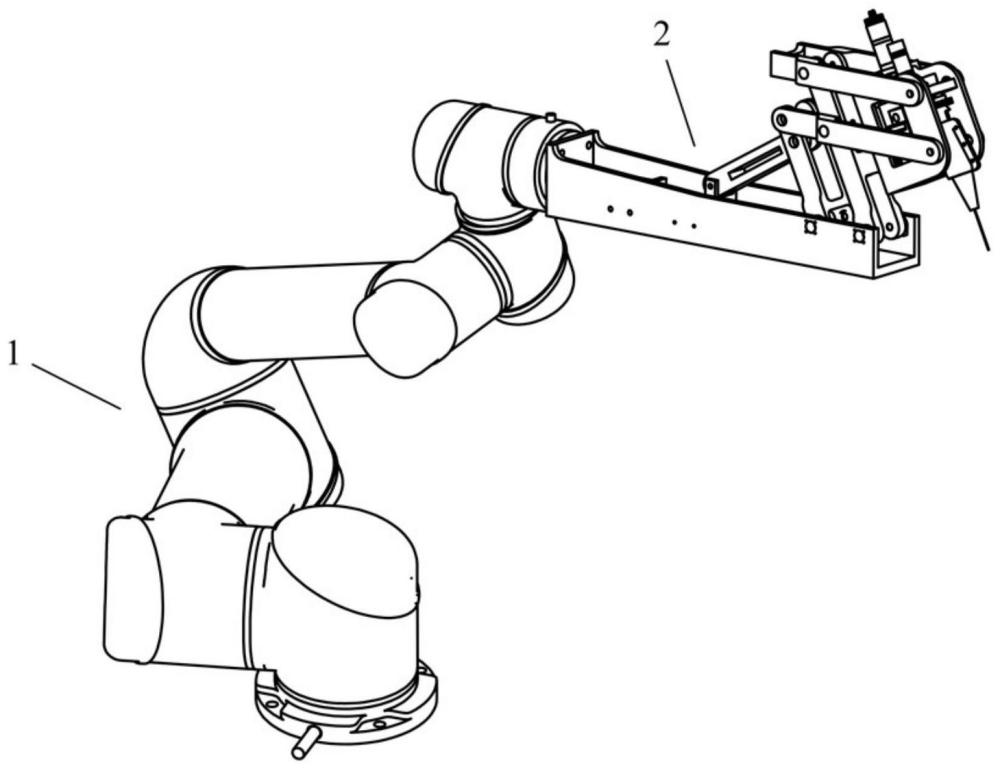
图1为本发明一实施例中的第一机械臂和第二机械臂的结构示意图;
图2为本发明一优选实施例中的第二机械臂的结构示意图;
图3为本发明一优选实施例中的底座与直线驱动机构的结构示意图;
图4为本发明一优选实施例中的末端执行器的结构示意图;
图5为本发明一优选实施例中的末端执行器内部的结构示意图;
图6为本发明另一优选实施例的玻璃体视网膜手术机器人操控方法的工作原理框图;
其中:
1-UR 5e商用机械臂,2-RCM机械臂;
20-直线驱动机构,21-RCM机构,22-末端执行器;
201-底座,202-直流电机,203-电机固定件,204-丝杠固定件,205-滑动平台,206-丝杠,207-导轨;
220-支架,221-滑块,222-导轨,223-第二电机,224-第一电机,225-滑块平台,226-传动齿轮,227-器械夹具,228-手术器械。
具体实施方式
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进。这些都属于本发明的保护范围。
如图1所示,本发明提供一个实施例,一种玻璃体视网膜手术机器人系统,包括:
第一机械臂和第二机械臂,第一机械臂包含至少一个自由度;第一机械臂与第二机械臂连接,第二机械臂包含若干个自由度;基于第一机械臂和第二机械臂,实现机器人系统各个自由度解耦并控制手术器械在设定的虚拟不动点处进行运动。
其中,虚拟不动点是本款机器人的一个固有属性。虹膜是眼球上的组织。虚拟不动点功能是指机械臂可以绕着一个固定的虚拟点进行运动,这个点是通过机器人系统设计确定的,这是机器人实现的一个重要功能。在手术时,将该不动点与眼球上的巩膜切口(切口是医生所确定的)重合,这样就保证了在机器人辅助的手术过程中,不论机器人怎么运动,都不会产生对巩膜的切向运动,从而避免了对眼球造成撕扯,提升安全性。
作为一优选实施例,第一机械臂为商用机械臂UR 5e1,第二机械臂为RCM机械臂2。RCM机械臂2通过四个M6螺栓与UR机械臂2固连在一起。其中,RCM机械臂部分含有三个自由度(末端执行器的自转运动和进给/退出运动、RCM机械臂自身的夹角自由度),UR5e上只采用了其最后一个关节的自由度,共同组成了四个自由度,由于RCM机械臂上的三个自由度是解耦的,因此称为该款机器人四个自由度解耦。
为了使得第一机械臂和第二机械臂各自由度解耦运动,实现在虚拟不动点进行运动的功能,本发明提供一个优选实施例,如图2所示。第二机械臂为RCM机械臂,即包括底座和直线驱动机构20、RCM杆件机构21和末端执行器22。直线驱动机构20与RCM杆件机构21之间连接,实现面内倾斜运动(指杆件机构21与直线驱动机构20之间的夹角自由度)。RCM杆件机构21设计成前后形式,用于夹持末端执行器22。
在本发明的其他实施例中,如图3所示,底座201作为第二机械臂的支撑机构和连接结构,其端面与第一机械臂(UR机械臂)直接连接在一起。直线驱动机构20包括电机202、电机固定件203、丝杠固定件204、滑动平台205、丝杠206和导轨207。具体的,电机202通过螺栓固定于电机固定件203上,丝杆206与电机202加工为一体,丝杠末端通过丝杠固定件204固定。电机固定件203和丝杠固定件204通过螺栓固定于底座201底部,从而实现整个直线驱动机构的固定。RCM杆件机构21的两个旋转杆通过销和销套与底座201实现铰接。
在本实施例的另一个优选实施例中,RCM杆件机构21包括驱动杆和双平行四杆,所述双平行四杆包括两组平行杆,如图2所示,交叉铰接构成“w”型,其一个末端铰接于底座201处,另一个模块夹持末端执行器22。驱动杆的一端与双平行丝杆铰接,另一端铰接于滑动平台205处。
本实施例设计了基于双平行四杆构型的RCM(Remote Center ofMotion)机构,可以实现在虚拟远程运动中心(RCM点)四个自由度的运动,从而避免医生在术中对巩膜切口可能造成的撕扯以及其他不安全运动。
在本发明的另一个实施例中,机械臂的二自由度末端执行器如图4和图5所示,其中支架220充当了RCM机构的末端杆,同时为其他结构提供了支撑。223为直流电机(第二电极),其输出端连有丝杠,用于对手术器械228的上下进给进行驱动。滑块221和导轨222为手术器械的进给运动提供了导向作用,并防止滑块平台225随着丝杠螺母的旋转而旋转。旋转小电机224(第一电机)固定于滑块平台225上,通过齿轮226将旋转运动传递到手术器械夹具及器械上。夹具227通过卡扣方式夹紧手术器械,便于拆卸;夹具穿过轴承放置于滑块平台225上,通过施加螺栓实现轴向限位。这样的结构设计实现了手术器械的二自由度驱动,包括进给/退出运动以及绕自身轴线的进给运动。
本实施例设计了一个新型的二自由度末端执行器,可以实现手术器械的自转及通过RCM点的进给运动,结构简单,质量较轻。
在本发明的其他实施例中,手术器械前端内部嵌有FBG和OCT光纤,分别用来感知器械与眼组织的接触力和器械尖端的深度信息,从而为控制系统提供运动信息反馈,提高机器人运动精度。
基于本发明的相同构思,提出一种玻璃体视网膜手术机器人操控方法,包括:
S01,医生通过人机交互界面与玻璃体视网膜手术机器人系统进行交互,通过输入相应指令得到第一机械臂和第二机械臂即从手机械臂的视觉和位置的信息反馈;
S02,根据输入指令完成从手机械臂(第一机械臂和第二机械臂)初始化和虚拟不动点定位;
S03,医生选择操作模式;
S04,后台根据医生选择的操作模式完成相应的操控。
本发明实施例中,主手是指由医生直接操控的其他机械臂,如商业化主手Geomagic Touc;从手是指第一机械臂和第二机械臂,如UR5e和RCM机械臂,也就是直接接触病人并进行手术操作的一端。
其中,医生通过操作软件界面上的按钮,来控制机械臂的运动。而机械臂上的各关节所配备的编码器均可以将各关节的运动信息传递至计算机,显示在软件界面上。根据操作模式的不同,反馈的信息可以是从手机械臂的视觉和位置的信息反馈,也可以包括比如主手的运动信息、从手机械臂各关节的位置、显微镜的眼内图像等。
软件界面上有很多按钮,医生可以决定机器人(玻璃体视网膜手术机器人系统)的“开始”、“定位”“停止”等不同操作过程。也可以选择不同的操作模式,包括主从操作模式(医生通过控制主手来完成)和半自动操作模式。比如当医生想要通过主手来操纵从手完成手术时,就采用主从操作;医生在监督下让玻璃体视网膜手术机器人完成特定轨迹的自动跟踪,这是半自动操作模式。
在本发明的一个优选实施例中,提供了两种操作模式的实施过程,分别为:
半自主模式,软件界面中所有直接对应从手运动的操作按钮均为半自主运动模式;当选择半自主操作模式时,主手运动将被屏蔽,从手运动由软件界面的操作按钮直接对从手机械臂进行控制;
主从模式,从手与主手间的运动遵循运动映射关系;其中,运动映射关系包括:主手获取运动增量;运动增量经滤波(以达到稳手目的)、运动缩放后得到从手运动变量;将通过操作空间的运动约束方法对从手运动变量进行安全处理;安全处理后的从手运动变量通过逆运动学计算得到最终的各电机运动增量。其中,运动约束方法、逆运动学计算属于现有技术中较为成熟的技术。
在本发明的一个优选实施例中,从手与主手间的运动遵循运动映射关系,具体为,对主手反馈的位置信号处理,得到运动增量X
本实施例构建了主从式控制系统,整合了运动缩放和滤波方法,可以实现从手相对于主手的运动缩小,并实现稳手,从而提高手术操作精度,降低对医生操作输入的要求。滤波方法可以采用小波滤波和自适应滤波相结合的方式进行滤波,即先对运动增量X
较佳实施例中,可以在软件系统内设计危险力约束方法。设定一受力安全阈值,根据FBG力传感系统得到的器械尖端受力,判断其是否超过安全阈值,并根据结果控制机械臂实现自适应运动,从而实现力-位混合控制。而OCT光纤感知到的位置信息可以在运动控制方法中作为真实的位置反馈,从而提高机器人的操作精度。
基于相同的发明构思,本发明实施例还提供一种终端,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行上述任一个实施例中的玻璃体视网膜手术机器人操控方法。
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,这并不影响本发明的实质内容。上述各优选特征在互不冲突的情况下,可以任意组合使用。
- 一种扫地机器人控制方法、系统、移动终端及存储介质
- 一种用于玻璃体-视网膜手术的眼科机器人末端器
- 一种用于玻璃体-视网膜手术的眼科机器人末端器