虚拟环境下的自动驾驶车辆模拟方法及系统
文献发布时间:2023-06-19 19:23:34
技术领域
本发明涉及一般车辆领域,具体涉及虚拟环境下的自动驾驶车辆模拟方法及系统。
背景技术
随着车辆领域的发展,目前许多商家致力于自动驾驶系统的研究。一般而言,自动驾驶系统中可以设置一些特征参数,以使得车辆可以在无人接管车辆的情况下,按照预期行驶路线行驶。
可以理解的是,实际投入使用的自动驾驶系统,在一定程度上要求车辆的实际行驶路线与预期行驶路线之间的误差尽可能小,因此,自动驾驶系统的特征参数的设定尤为重要。而特征参数的设定过程需要对特征参数进行验证,即验证该特征参数是否可以使得车辆的实际行驶路线与预期行驶路线之间的误差尽可能小。
申请号为CN202080064163.X的专利公开了虚拟环境下的自动驾驶车辆模拟方法,作为移动体模拟方法,其包括:模拟预处理步骤,第一服务器在规定时间内生成环境信息,上述环境信息包括模拟对象道路信息、周边车辆信息、周边行人信息、周边障碍物信息、周边交通信号灯信息、周边标志牌信息、事件信息中的至少一个;以及模拟步骤,第二服务器在上述规定时间内利用上述环境信息计算基于模拟对象车辆的行驶产生的上述模拟对象车辆的传感部输出数据,可在防止因服务器的资源限制导致的过载的同时,提高算法验证的质量,但仍然存在以下不足之处:由于自动驾驶模拟车辆造价昂贵,若验证过程中出现意外,则可能会损毁车辆,造成较高的经济损失,而且每次特征参数验证时,验证人员都需要去验证场地验证,验证方式困难且验证成本比较高。
如何改善现有的虚拟环境下的自动驾驶车辆模拟方法无法保证自动驾驶模拟车辆的安全性易于导致其损坏,而且车辆模拟方法困难且验证成本比较高是本发明的关键,因此,亟需一种虚拟环境下的自动驾驶车辆模拟方法及系统来解决以上问题。
发明内容
为了克服上述的技术问题,本发明的目的在于提供虚拟环境下的自动驾驶车辆模拟方法及系统:通过远程控制模块利用互联网和自动驾驶车辆的车辆控制模块进行连接,还生成控制指令,并将控制指令发送至车辆控制模块,通过车辆控制模块根据控制指令、自控指令控制自动驾驶车辆行驶,通过数据采集模块根据标准路段、行驶路段获得行驶参数,并将行驶参数发送至数据分析模块,通过数据分析模块根据行驶参数获得模拟系数,根据模拟系数获得判定参数,并将判定参数发送至车辆模拟平台,通过车辆模拟平台根据判定参数获得模拟总值,并根据模拟总值对虚拟环境下的自动驾驶车辆模拟实验进行判定,解决了现有的虚拟环境下的自动驾驶车辆模拟方法无法保证自动驾驶模拟车辆的安全性易于导致其损坏,而且车辆模拟方法困难且验证成本比较高的问题。
本发明的目的可以通过以下技术方案实现:
虚拟环境下的自动驾驶车辆模拟系统,包括:
远程控制模块,用于利用互联网和自动驾驶车辆的车辆控制模块进行连接,还用于生成控制指令,并将控制指令发送至车辆控制模块;
车辆控制模块,用于根据控制指令、自控指令控制自动驾驶车辆行驶;
数据采集模块,用于根据标准路段i、行驶路段j获得行驶参数,行驶参数包括驶重差SC、标驶面BS以及自控值ZK,并将行驶参数发送至数据分析模块;
数据分析模块,用于根据行驶参数获得模拟系数MN,根据模拟系数MN获得判定参数,判定参数包括不合值BZ、合格值HZ以及均膜系数JX,并将判定参数发送至车辆模拟平台;
车辆模拟平台,用于根据判定参数获得模拟总值MZ,并根据模拟总值MZ对虚拟环境下的自动驾驶车辆模拟实验进行判定。
作为本发明进一步的方案:所述数据采集模块获得行驶参数的具体过程如下:
将标准路线随机划分为若干条子路段,并将其标准路段i,i=1、……、n,n为自然数;
获取自动驾驶车辆行驶产生的路线并将其标记为行驶路线,并按照标准路线的划分位点将行驶路线划分为若干条子路段,并将其标记为行驶路段j,j=1、……、m,m为自然数;
将标准路段i与行驶路段j绘制于同一经纬度坐标系中;
获取经过行驶路段j的总长度,并将其标记为行驶值XC,获取标准路段i与行驶路段j的重合长度,并将其标记为重合值CH,获得行驶值XC、重合值CH的差值并将其标记为驶重差SC;
以标准路段i与行驶路段j为边界,获取标准路段i与行驶路段j所形成图形的面积,并将其标记为标驶面BS;
获取自动驾驶车辆在行驶路段j执行自控指令的总时长和行驶总时长,并获取两者之比并将其标记为控行比KX,获取自动驾驶车辆在行驶路段j执行自控指令的次数并将其标记为控次值KC,获取控行比KX与控次值KC的乘积并将其标记为自控值ZK;
将驶重差SC、标驶面BS以及自控值ZK发送至数据分析模块。
作为本发明进一步的方案:所述数据分析模块获得模拟系数MN的具体过程如下:
接收到驶重差SC、标驶面BS以及自控值ZK后将三者代入公式
将模拟系数MN与模拟阈值MNy进行比较:
若模拟系数MN>模拟阈值MNy,则将模拟系数MN所对应的行驶路段j标记为不合格路段;
若模拟系数MN≤模拟阈值MNy,则将模拟系数MN所对应的行驶路段j标记为合格路段;
获取不合格路段个数与合格路段个数并将其标记为不合值BZ和合格值HZ,获得所有模拟系数MN的平均值并将其标记为均膜系数JX;
将不合值BZ、合格值HZ以及均膜系数JX发送至车辆模拟平台。
作为本发明进一步的方案:所述车辆模拟平台获得模拟总值MZ的具体过程如下:
接收到不合值BZ、合格值HZ以及均膜系数JX后将三者代入公式
将模拟总值MZ与预设模拟总值MZy进行比较:
若模拟总值MZ>预设模拟总值MZy,则控制显示灯亮起红灯,并控制显示屏显示“模拟失败”字样;
若模拟总值MZ≤预设模拟总值MZy,则控制显示灯亮起绿灯,并控制显示屏显示“模拟成功”字样。
作为本发明进一步的方案:虚拟环境下的自动驾驶车辆模拟方法,包括以下步骤:
步骤一:远程控制模块利用互联网和自动驾驶车辆的车辆控制模块进行连接,从而获取自动驾驶车辆的控制权;
步骤二:远程控制模块从车辆模拟平台中获取虚拟环境模型以及路线;
步骤三:测试人员根据虚拟环境模型以及路线生成控制指令,并将控制指令发送至车辆控制模块;
步骤四:车辆控制模块将虚拟环境模型的路线标记为标准路线;
步骤五:车辆控制模块采集远程控制模块生成控制指令的时刻以及车辆控制模块接收到控制指令的时刻,获取两者之间的时间差并将其标记为控时差KS;
步骤六:车辆控制模块将控时差KS与控时差阈值KSy进行比较:
若控时差KS<控时差阈值KSy,则执行控制指令,并根据控制指令控制自动驾驶车辆行驶;
若控时差KS≥控时差阈值KSy,则执行自控指令,并根据自控指令获得自动驾驶车辆的控制权,启动自动驾驶,控制自动驾驶车辆按照标准路线行驶;
步骤七:数据采集模块将标准路线随机划分为若干条子路段,并将其标准路段i,i=1、……、n,n为自然数;
步骤八:数据采集模块获取自动驾驶车辆行驶产生的路线并将其标记为行驶路线,并按照标准路线的划分位点将行驶路线划分为若干条子路段,并将其标记为行驶路段j,j=1、……、m,m为自然数;
步骤九:数据采集模块将标准路段i与行驶路段j绘制于同一经纬度坐标系中;
步骤十:数据采集模块获取经过行驶路段j的总长度,并将其标记为行驶值XC,获取标准路段i与行驶路段j的重合长度,并将其标记为重合值CH,获得行驶值XC、重合值CH的差值并将其标记为驶重差SC;
步骤十一:数据采集模块以标准路段i与行驶路段j为边界,获取标准路段i与行驶路段j所形成图形的面积,并将其标记为标驶面BS;
步骤十二:数据采集模块获取自动驾驶车辆在行驶路段j执行自控指令的总时长和行驶总时长,并获取两者之比并将其标记为控行比KX,获取自动驾驶车辆在行驶路段j执行自控指令的次数并将其标记为控次值KC,获取控行比KX与控次值KC的乘积并将其标记为自控值ZK;
步骤十三:数据采集模块将驶重差SC、标驶面BS以及自控值ZK发送至数据分析模块;
步骤十四:数据分析模块接收到驶重差SC、标驶面BS以及自控值ZK后将三者代入公式
步骤十五:数据分析模块将模拟系数MN与模拟阈值MNy进行比较:
若模拟系数MN>模拟阈值MNy,则将模拟系数MN所对应的行驶路段j标记为不合格路段;
若模拟系数MN≤模拟阈值MNy,则将模拟系数MN所对应的行驶路段j标记为合格路段;
步骤十六:数据分析模块获取不合格路段个数与合格路段个数并将其标记为不合值BZ和合格值HZ,获得所有模拟系数MN的平均值并将其标记为均膜系数JX;
步骤十七:数据分析模块将不合值BZ、合格值HZ以及均膜系数JX发送至车辆模拟平台;
步骤十八:车辆模拟平台接收到不合值BZ、合格值HZ以及均膜系数JX后将三者代入公式
步骤十九:车辆模拟平台将模拟总值MZ与预设模拟总值MZy进行比较:
若模拟总值MZ>预设模拟总值MZy,则控制显示灯亮起红灯,并控制显示屏显示“模拟失败”字样;
若模拟总值MZ≤预设模拟总值MZy,则控制显示灯亮起绿灯,并控制显示屏显示“模拟成功”字样。
本发明的有益效果:
本发明的虚拟环境下的自动驾驶车辆模拟方法及系统,通过远程控制模块利用互联网和自动驾驶车辆的车辆控制模块进行连接,还生成控制指令,并将控制指令发送至车辆控制模块,通过车辆控制模块根据控制指令、自控指令控制自动驾驶车辆行驶,通过数据采集模块根据标准路段、行驶路段获得行驶参数,并将行驶参数发送至数据分析模块,通过数据分析模块根据行驶参数获得模拟系数,根据模拟系数获得判定参数,并将判定参数发送至车辆模拟平台,通过车辆模拟平台根据判定参数获得模拟总值,并根据模拟总值对虚拟环境下的自动驾驶车辆模拟实验进行判定;该自动驾驶车辆模拟方法通过车辆控制模块获得控时差,控时差用于衡量远程控制时指令发出与接收之间的时间差,若控时差表示存在未及时根据指令作出反应或作出反应延迟的安全隐患出现,因此,及时进行自动控制,避免隐患出现,通过数据采集模块获得模拟系数,模拟系数用于衡量某一段行驶路段与标准路段之间的偏差程度,模拟系数越大表示存在的偏差越大,表示此段自动驾驶存在误差,通过数据分析模块获得模拟总值,模拟总值用于衡量行驶路线与标准路线之间的总偏差,模拟总值越大表示存在的总偏差越大,用于对该虚拟环境下的自动驾驶模拟实验进行合格判定;该系统通过控时差保证了自动驾驶车辆的安全性,通过模拟系数与模拟总值能够及时且准确对自动驾驶车辆的驾驶过程进行分析,实现了虚拟环境下的自动驾驶的模拟,该方法实现了在线实时验证,验证方法简便且无须现场验证,降低了验证成本。
附图说明
下面结合附图对本发明作进一步的说明。
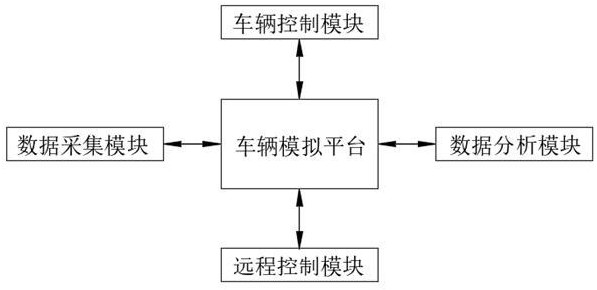
图1是本发明中虚拟环境下的自动驾驶车辆模拟系统的原理框图。
具体实施方式
下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
实施例1:
请参阅图1所示,本实施例为虚拟环境下的自动驾驶车辆模拟系统,包括远程控制模块、车辆控制模块、数据采集模块、数据分析模块以及车辆模拟平台;
其中,所述远程控制模块用于利用互联网和自动驾驶车辆的车辆控制模块进行连接,还用于生成控制指令,并将控制指令发送至车辆控制模块;
其中,所述车辆控制模块用于根据控制指令、自控指令控制自动驾驶车辆行驶;
其中,所述数据采集模块用于根据标准路段i、行驶路段j获得行驶参数,行驶参数包括驶重差SC、标驶面BS以及自控值ZK,并将行驶参数发送至数据分析模块;
其中,所述数据分析模块用于根据行驶参数获得模拟系数MN,根据模拟系数MN获得判定参数,判定参数包括不合值BZ、合格值HZ以及均膜系数JX,并将判定参数发送至车辆模拟平台;
其中,所述车辆模拟平台用于根据判定参数获得模拟总值MZ,并根据模拟总值MZ对虚拟环境下的自动驾驶车辆模拟实验进行判定。
实施例2:
请参阅图1所示,本实施例为虚拟环境下的自动驾驶车辆模拟方法,包括以下步骤:
步骤一:远程控制模块利用互联网和自动驾驶车辆的车辆控制模块进行连接,从而获取自动驾驶车辆的控制权;
步骤二:远程控制模块从车辆模拟平台中获取虚拟环境模型以及路线;
步骤三:测试人员根据虚拟环境模型以及路线生成控制指令,并将控制指令发送至车辆控制模块;
步骤四:车辆控制模块将虚拟环境模型的路线标记为标准路线;
步骤五:车辆控制模块采集远程控制模块生成控制指令的时刻以及车辆控制模块接收到控制指令的时刻,获取两者之间的时间差并将其标记为控时差KS;
步骤六:车辆控制模块将控时差KS与控时差阈值KSy进行比较:
若控时差KS<控时差阈值KSy,则执行控制指令,并根据控制指令控制自动驾驶车辆行驶;
若控时差KS≥控时差阈值KSy,则执行自控指令,并根据自控指令获得自动驾驶车辆的控制权,启动自动驾驶,控制自动驾驶车辆按照标准路线行驶;
步骤七:数据采集模块将标准路线随机划分为若干条子路段,并将其标准路段i,i=1、……、n,n为自然数;
步骤八:数据采集模块获取自动驾驶车辆行驶产生的路线并将其标记为行驶路线,并按照标准路线的划分位点将行驶路线划分为若干条子路段,并将其标记为行驶路段j,j=1、……、m,m为自然数;
步骤九:数据采集模块将标准路段i与行驶路段j绘制于同一经纬度坐标系中;
步骤十:数据采集模块获取经过行驶路段j的总长度,并将其标记为行驶值XC,获取标准路段i与行驶路段j的重合长度,并将其标记为重合值CH,获得行驶值XC、重合值CH的差值并将其标记为驶重差SC;
步骤十一:数据采集模块以标准路段i与行驶路段j为边界,获取标准路段i与行驶路段j所形成图形的面积,并将其标记为标驶面BS;
步骤十二:数据采集模块获取自动驾驶车辆在行驶路段j执行自控指令的总时长和行驶总时长,并获取两者之比并将其标记为控行比KX,获取自动驾驶车辆在行驶路段j执行自控指令的次数并将其标记为控次值KC,获取控行比KX与控次值KC的乘积并将其标记为自控值ZK;
步骤十三:数据采集模块将驶重差SC、标驶面BS以及自控值ZK发送至数据分析模块;
步骤十四:数据分析模块接收到驶重差SC、标驶面BS以及自控值ZK后将三者代入公式
步骤十五:数据分析模块将模拟系数MN与模拟阈值MNy进行比较:
若模拟系数MN>模拟阈值MNy,则将模拟系数MN所对应的行驶路段j标记为不合格路段;
若模拟系数MN≤模拟阈值MNy,则将模拟系数MN所对应的行驶路段j标记为合格路段;
步骤十六:数据分析模块获取不合格路段个数与合格路段个数并将其标记为不合值BZ和合格值HZ,获得所有模拟系数MN的平均值并将其标记为均膜系数JX;
步骤十七:数据分析模块将不合值BZ、合格值HZ以及均膜系数JX发送至车辆模拟平台;
步骤十八:车辆模拟平台接收到不合值BZ、合格值HZ以及均膜系数JX后将三者代入公式
步骤十九:车辆模拟平台将模拟总值MZ与预设模拟总值MZy进行比较:
若模拟总值MZ>预设模拟总值MZy,则控制显示灯亮起红灯,并控制显示屏显示“模拟失败”字样;
若模拟总值MZ≤预设模拟总值MZy,则控制显示灯亮起绿灯,并控制显示屏显示“模拟成功”字样。
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
以上内容仅仅是对本发明所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。