用于车辆的触觉操作控制装置和方法
文献发布时间:2023-06-19 19:23:34
本发明是申请号为202110250687.4、申请日为2021年3月8日、发明名称为“用于车辆的触觉操作控制装置和方法”的中国发明专利申请的分案申请。
技术领域
本发明涉及一种用于车辆特别是机动车辆的触觉操作控制装置,其具有至少一个磁流变制动装置,该磁流变制动装置具有静态保持器和至少两个制动部件和/或阻尼器部件。根据本发明的具有磁流变制动装置的触觉操作控制装置可用于机动车辆中的各种目的。根据本发明的触觉操作控制装置可以例如用于车辆中的技术装置的操作控制,例如作为旋转致动器、旋转/按压致动器、对于信息娱乐、空调系统(温度、风扇速度、分配…)用作变速器选择开关、用于导航、用于巡航控制、用于自适应巡航控制、用于座椅调节、用于转向系统或方向盘中、用于底盘调节、用于驾驶模式调节、用于风挡擦拭器设置、用作车窗或滑动车顶致动器、用作停车辅助或用于设置(部分)自主驾驶或用作方向盘替代物等。
背景技术
磁流变流体具有例如分布在油中的超细铁磁颗粒,例如羰基铁颗粒。在磁流变流体中,使用生产相关直径为1-10μm的近似圆形或球形颗粒,其中,颗粒尺寸和形状不一致。如果这样的磁流变流体经受磁场,则该磁流变流体的羰基铁颗粒沿磁场线互连,使得该磁流变流体(MRF)的流变特性以取决于磁场的形式和强度的方式受到相当大的影响(可传递的剪切应力)。
WO 2012/034697A1公开了一种磁流变传动装置,该磁流变传动装置具有两个可联接的部件,这些部件的联接强度可以受到影响。为了影响耦合强度,提供具有磁流变介质的通道。通道中的磁流变介质受到磁场的影响。在通道中设有旋转体,该旋转体上设有包含磁流变介质的锐角区域。通道或其至少一部分可经受磁场产生装置的磁场,以便选择性地(磁性地)互连颗粒,并使它们与旋转体挤压在一起,或释放所述颗粒。该磁流变传动装置还可用于操作控制工业设备的旋转拨盘。这种磁流变传动装置起作用并允许传递极高的力或扭矩,同时具有相对较小的结构形式或结构体积。
WO 2012/034697A1还公开了一种旋转拨盘或操作控制拨盘,在此情况下,拨盘本身被附接以便能够绕轴旋转。可以通过由电线圈产生的磁场来控制制动力矩。如果希望能够产生更高的制动力矩,那么也可以代替球形旋转体而使用圆柱形辊,使得磁场作用在更长的距离或更大的面积上(磁场集中和楔形形成发生在更大的面积上)。特别是在相对小直径的旋转或操作控制拨盘的情况下,已经发现,滚动体的延长不会不可避免地导致可以产生的最大制动力矩的增加。已经发现这是因为磁场被中心轴封闭或者必须穿过中心轴。轴的小直径限制了可以产生的制动力矩,因为制动作用所需的磁场在(轴)材料中迅速饱和。磁场流过的材料不允许磁通量进一步增加,其结果是更强的磁场也不可能到达辊。磁场在整个磁路中流过的最小横截面限定了最大可能的磁通量,并因此限定了制动装置中的最大制动力矩。使用相对较长的辊作为旋转体甚至对可产生的制动力矩具有不利影响,因为磁场分布在较长的辊表面上。低场强占主导地位(低磁场集中)。因为可实现的制动作用不是线性地依赖于磁场而是在存在较强磁场时不成比例地增加,因此可实现的制动作用在存在较弱磁场时不成比例地减小。
发明内容
因此,本发明的目的是提供一种具有用于车辆的磁流变制动装置的触觉操作控制装置,该触觉操作控制装置尤其允许高制动力矩(扭矩),或者比现有技术中的情况更高的制动力矩(扭矩),即使在小直径的情况下或者甚至在非常小直径的情况下。
该目的借助用于车辆的触觉操作控制装置来实现。触觉操作控制装置的其它优点和特征将从一般描述和示例性实施方式的描述中得以显现。
根据本发明的用于车辆且特别是机动车辆的触觉操作控制装置包括至少一个磁流变制动装置,该磁流变制动装置具有制动壳体并具有静态保持器和至少两个制动部件。这两个制动部件中的一个抗旋转地连接到保持器,并且这两个制动部件可相对于彼此连续地旋转。第一制动部件沿轴向延伸并且包括沿轴向延伸并且由导磁材料构成的芯。第二制动部件包括壳体部分,该壳体部分具有中空形式并且是围绕第一制动部件可旋转的。在第一制动部件与第二制动部件之间形成至少部分地且尤其完全填充有磁流变介质的环绕间隙。这里,磁流变介质润湿制动部件。(至少一个)电线圈容纳在制动壳体中。其上形成有磁场集中器的至少一个星形轮廓件被布置或容纳在所述壳体部分与所述芯之间,该磁场集中器径向地伸入所述间隙中,使得在所述星形轮廓件的区域中形成具有变化的间隙高度(在该圆周角上)的环绕间隙。
第一制动部件限定轴向方向。然而,第一制动部件也可以形成为至少局部地相对于轴向方向成角度。第一制动部件的芯沿轴向方向延伸的表述在本发明的上下文中应理解为意指所述芯至少尤其基本上沿轴向方向延伸。所述芯可以具有相对于轴向方向具有微小角度的路线。例如,所述芯还可以相对于轴向方向以2.5°或5°或10°或15°的角度定向。电线圈的绕组可以围绕所述芯径向地定向,或者也可以围绕芯在轴向方向上定向(同样不是精确地)。电线圈也可以相对于轴向或径向方向成5°或10°或15°或类似的角度。在电线圈围绕芯轴向缠绕的情况下,优选地,芯的定向与轴向方向之间的角度以及电线圈的缠绕相对于轴向方向的角度小于20°,并且尤其小于10°。
根据本发明的用于车辆的触觉操作控制装置具有许多优点。根据本发明的用于车辆的触觉操作控制装置的主要优点在于,可以通过具有磁场集中器的星形轮廓件或星状轮廓件产生高制动力矩(高剪切应力)。
特别的优点来自于这样的事实,即,磁场集中器被固定地连接到芯和/或壳体部分,并且尤其与其一体地形成。因此,就装配而言,可以以很小的费用制造出特别简单和廉价的结构。已经令人惊讶地发现,磁场集中器不需要被设计为自身可旋转的,或作为可旋转的滚动体,而是甚至静态磁场集中器就能够可靠地和可再现地提供可产生的制动力矩的强烈增加。
磁场集中器可以单独制造并连接到星形轮廓件,或者可以直接固定连接,例如螺纹连接、铆接连接、焊接、熔接或甚至可能粘接到芯或壳体部分,或者与芯或壳体部分挤压在一起。令人惊讶地,磁场集中器也可以附接到壳体部分。总之,在小的(甚至更小的)结构空间中产生高制动力矩。这样,制动力矩可以整体增大,或者可以用较小的结构空间保持相同。也开辟了新的可能性,因为可以用相当小的结构空间产生比以前更大的制动力矩。
根据本发明的触觉操作控制装置用于所有类型的车辆。尤其是用于机动车辆中。在摩托车上也可以使用。本发明可用于公路和非公路车辆。根据本发明的触觉操作控制装置可用于在陆地和空中行驶的交通工具中和交通工具上。可以配备给自驱动车辆和(部分)自主车辆、出租车、机器人出租车。
在本发明的上下文中,星形轮廓件也被理解为表示星状轮廓件。本发明意义内的星形轮廓件具有径向突出的轮廓元件作为磁场集中器。尤其时,轮廓元件处的局部半径大于圆周方向上与其相邻的位置处的局部半径。最大局部半径优选比在圆周方向上与其相邻的最小局部半径大至少0.1%、尤其是大至少0.25%(优选更大)。优选在圆周上形成多个轮廓元件。
电线圈优选缠绕在芯的至少一个部分周围,使得电线圈的磁场穿过芯和磁场集中器并穿过(轴向和/或径向延伸的)间隙进入壳体部分的壁。
优选地,磁场或磁场线横向穿过第一或内部制动部件。然后,在直径不变的情况下,第一制动部件的加长增加了可能的磁通量并因此增加了制动力矩。芯直径通常由于结构原因而不能做得更大,因此不会限制磁通量。
在磁流变制动装置中,磁场集中器形成传动部件。磁场集中器或传动部件至少部分地、尤其是基本上完全地或完全地被磁流变介质包围。总之,优选磁流变流体用作磁流变介质。
优选地,多个磁场集中器(作为传动部件)被布置成在间隙的圆周上分布。磁场集中器本身不可旋转,但可随着其所紧固的制动部件一起旋转。因此在旋转期间在间隙中发生相对运动。
还有可能的是,除了磁场集中器之外或代替星形轮廓件的单独区段还包括例如呈滚动体形式的另外的传动部件。在本发明的上下文中,表述“滚动体”应被理解为是指适合于在间隙中在第一或第二制动部件上滚动的旋转体。
在本发明的优选改进中,至少一个磁场集中器具有朝向远端渐缩的横截面积。
优选地,至少一个磁场集中器在远端处是圆形的。
优选地,芯包括多个臂和/或壳体部分包括多个臂作为磁场集中器,其径向和/或轴向突出。臂从芯径向向外和/或轴向向侧面突出。臂优选地从壳体部分径向向内和/或轴向向侧面突出。
在所有改进中,优选的是,至少一个臂被电线圈围绕。特别优选的是,多个臂分别被电线圈围绕。
优选地,(径向突出的)臂的径向长度小于该臂在轴向方向上的长度。
优选地,至少一个电线圈缠绕在轴周围,并且在芯中产生基本上在轴向方向上的磁场(径向线圈)。
电线圈优选径向地(以环绕的方式)容纳在芯和壳体部分之间。
尤其是,电线圈或至少一个电线圈在内部紧固到壳体部分。然后,所述电线圈在第一制动部件上与芯径向地间隔开。至少一个电线圈缠绕在芯上也是可能的和优选的。电线圈可以径向缠绕在芯周围。电线圈也可以轴向缠绕在芯周围。然后,电线圈的对称轴线相对于第一制动部件的纵向范围横向延伸。
在优选的改进中,至少两个星形轮廓件容纳在制动壳体中。星形轮廓件可以是相同的设计,尤其也可以是不同的设计。
优选地,安置两个星形轮廓件以便彼此轴向间隔开。还可以安置三个、四个或更多个星形轮廓件,以便(在每种情况下)彼此轴向间隔开。每个所述星形轮廓件可以具有与其它星形轮廓件相同的形式或者也可以具有不同的形状。
优选地,在每种情况下,两个星形轮廓件以成对的方式具有相同的形式。
至少一个星形轮廓件尤其被形成为具有径向突出的磁场集中器的单独的(并且优选中空的)环形凸缘。
磁场集中器可以形成为径向向外突出。然后,环形凸缘优选固定地(并且优选可拆卸地)连接到芯。
磁场集中器可以形成为倾斜地向外突出。然后,环形凸缘优选固定地(并且优选可拆卸地)连接到芯。
磁场集中器可以形成为横向(轴向)突出。然后,环形凸缘优选固定地(并且优选可拆卸地)连接到芯。
磁场集中器也可以形成为径向向内突出。然后,环形凸缘优选固定地(并且优选可拆卸地)连接到壳体部分。
磁场集中器也可以形成为倾斜地向内突出。然后,环形凸缘优选固定地(并且优选可拆卸地)连接到壳体部分。
磁场集中器也可以形成为横向(轴向)向内突出。然后,环形凸缘优选固定地(并且优选可拆卸地)连接到壳体部分。
优选地,至少两个星形轮廓件具有不同的外轮廓。外轮廓可以例如在径向上在内侧和/或在径向上在外侧和/或在至少一个轴向侧上不同。
优选地,至少一个星形轮廓件具有径向向外突出的磁场集中器并且以导磁的方式紧固到尤其是芯上。例如,星形轮廓件可以通过夹紧或通过螺纹连接固定在芯上。
优选地,至少一个星形轮廓件具有径向向内突出的磁场集中器并且以导磁方式紧固到壳体部分上(并且尤其是紧固在壳体部分中)。
优选的是,电线圈的磁场穿过芯和具有磁场集中器的至少一个星形轮廓件并且穿过间隙和壳体部分的壁。
如果包括两个轴向间隔开的星形轮廓件,则电线圈的磁场优选轴向穿过芯、轴向穿过壳体部分的壁并穿过具有磁场集中器的两个星形轮廓件以及分别在星形轮廓件与芯和壳体部分之间的间隙。
在一个特别优选的改进中,至少一个电线圈在轴向方向上围绕芯缠绕并且在径向方向上基本上产生一个磁场(水平线圈)。
尤其是,磁场集中器形成星形(横截面)的外轮廓。
优选地,壳体部分在至少一个轴向部分上具有圆柱形内表面。
优选地,电线圈围绕至少一个臂轴向延伸。尤其是,臂的外端和壳体部分的内表面之间的径向间隙高度小于邻近臂的第一制动部件的外表面和壳体部分的内表面之间的径向间隙尺寸。主体的表面可以形成为与臂相邻。如果引入封装化合物,则封装化合物的表面也可以与臂相邻,例如以便减小磁流变介质的体积,尤其是减小磁流变流体(MRF)的体积。
优选地,第二制动部件以可轴向移位的方式安置在第一制动部件上,以便在温度变化的情况下允许体积补偿。
优选地,在制动部件之间形成(至少一个)封闭(向外密封)的腔室。第二制动部件被安置在并且尤其在该封闭室的第一端处可旋转地安装在第一制动部件上(在第一支承点处),该封闭室基本上或完全填充有磁流变介质。
优选地,第二制动部件被安置在并且尤其可轴向移位地安装在第一制动部件上,这样使得封闭室的体积由于这些制动部件的相对轴向移位而改变,以便对温度引起的体积变化提供补偿。
如果电线圈在轴向方向上围绕芯缠绕并且在径向方向上基本上产生磁场,则是有利的。于是存在的优点是,通过在轴向方向上延长磁场集中器可以产生更强的制动力矩。与磁场集中器的加长同时地,(便利地)也可以加长在第一制动部件的纵向方向上延伸的电线圈。对于在轴向上较长形式的电线圈,为磁场提供了较大的通道面积(磁场流过的横截面积)。因此,第一制动部件在轴向方向上的延长还导致芯的截面的扩大。以此方式,通过在轴向方向上延长第一制动部件可以实现更强的制动力矩。
在优选的改进中,至少一部分磁场集中器由导磁材料构成。传动部件的一部分也可以由非磁性材料构成。如果使用由导磁材料构成的磁场集中器,并且如果同时还使用由非导磁材料构成的传动部件,则磁场集中在导磁磁场集中器的区域中。这导致磁场的集中(磁场强度的增加)和局部放大(磁场线集中)。例如,磁场强度因此在间隙中从小于350kA/m的值增加到1000kA/m的值或更高。(高或)集中的场强从磁流变流体中吸入更多的羰基铁颗粒,并且发生羰基铁累计(聚集)。这又允许产生更高的剪切应力并因此产生更高的制动力矩。
由于可以产生的制动力矩与磁场强度之间的关系不是线性的,并且由于可以产生的制动力矩随着增强磁场而不成比例地变得甚至更强,因此可以实现可以产生的制动力矩的显著增强(具有相同的结构空间/尺寸)。磁场集中器的数量也可以相应地选择为更少。
在所有的改进中,优选的是,壳体部分形成在旋转拨盘或旋转轮上或包括旋转拨盘或旋转轮。优选地,旋转部分可以与旋转拨盘或旋转轮一体地形成。在这种改进中,优选地,旋转拨盘或壳体部分是“罐”形形式。壳体部分的“盖”可以整体地连接到形成为套筒部分的旋转部分,或者可以单独地紧固到其上。
优选地,壳体部分由导磁材料构成,或者包括导磁套筒部分并为磁场提供外环。用于产生制动力矩的磁场穿过第一制动部件,并在导磁形式的磁场集中器处穿过间隙。磁场从磁场集中器进入壳体部分。在那里,在磁场线再次进入第一制动部件之前,磁场线返回。因此,存在闭合磁路,或者存在闭合磁场线。
在第一和第二制动部件相对于彼此的相对旋转期间,在磁场的影响下,在磁场集中器处产生楔形效应,如基本上在WO 2012/034697A1中描述的。所述文献的公开内容整体并入本申请。在本发明的情况下,即使磁场集中器本身不能旋转而是紧固到第一或第二制动部件,制动力矩也同样通过磁场集中器处的楔形效应或聚集而产生。
优选地,壳体部分或壳体部分的套筒部分的至少径向壁厚是间隙的间隙宽度和/或磁场集中器的径向长度的至少一半。优选地,壳体部分的(套筒部分的)径向壁厚大于间隙的间隙宽度的3/4。壳体部分的(套筒部分的)径向壁厚尤其也可以大于磁场集中器的径向长度。通过由导磁材料构成的壳体部分或旋转部分的套筒部分的足够的壁厚,可以确保能够在滚动体的区域中产生期望的磁场强度,以便能够产生制动力矩。
在所有改进中,优选的是,第一制动部件在轴向方向上的长度大于磁场集中器在轴向方向上的长度。如果磁场集中器被设计成在轴向方向上短于第一制动部件,则这导致磁场在磁场集中器的边缘区域中的三维集中。磁场实际上只能在磁场集中器所在的部分通过间隙。
优选地,间隙在轴向方向上的长度是磁场集中器在轴向方向上的长度的至少两倍。还可能并且优选的是,两个或更多个磁场集中器在轴向方向上彼此前后布置。
优选地,第一制动部件具有基本上圆柱形的形式并且包括一个主体,该主体作为芯至少在某些区段中是旋转对称的或圆柱形的,并且包括一个或更多个电线圈。还可以包括例如用于安装旋转拨盘的球,该球可以布置在远端中央,以便在第一制动部件和第二制动部件之间提供简单且低摩擦的轴承。
在使用“水平线圈”的情况下,电线圈可以缠绕在(第一制动部件的)圆柱形主体的轴向槽和横向槽中。在使用“径向线圈”的情况下,电线圈可以缠绕在环绕槽中。优选地,用封装化合物至少部分地填充或封装各个槽。这防止磁流变介质或磁流变流体进入线圈导线的区域。这可能导致流体分层。
保持器优选地具有电缆引线。用于线圈和/或传感器电缆等的连接电缆可被引导穿过支架或穿过支架的电缆引线。这样,使得容易组装和廉价生产成为可能。
优选地,保持器具有用于抗旋转地连接到第一制动部件的容座。在此,该保持器可以以非强制锁定和/或强制锁定的方式接纳该第一制动部件。在操作期间,第一制动部件和第二制动部件之间的制动力矩经由保持器耗散。
优选地,保持器具有用于轴承的圆柱形运行表面,并且将壳体部分可旋转地支撑在保持器上。
在该圆柱形运行表面上,优选地布置了用于密封间隙的密封件,其中该密封件尤其被布置成比轴承更靠近该间隙。这样,可靠地保护轴承免受磁流变介质的影响。这种改进允许紧凑的结构和可靠的操作。轴承例如可以是滑动轴承或滚动轴承。
圆柱形运行表面优选地被硬化和/或具有比容座的径向外表面更高的表面质量。由此可以降低制造成本。
在有利的改进中,该圆柱形运行表面具有比该保持器的容座的外径小至少3mm的外径。
保持器优选地紧固到支架或一些其它部件上。
在优选的改进中,触觉操作控制装置包括至少一个磁流变制动装置,并且还可以包括至少一个用户接口、操作控制面板、显示器、具有或不具有触觉反馈的触敏显示器、和/或至少一个传感器。
还可以在包括至少一个磁流变制动装置的触觉操作控制装置中使用。优选地还包括用户接口、操作控制面板、显示器、具有或不具有触觉反馈的触敏显示器和/或至少一个传感器。这种改进不仅允许操作控制,而且同时还允许在操作控制期间显示或输出信息。因此,例如,使得同时具有输出显示器的操作控制拨盘成为可能。
在所有改进中,优选的是,壳体部分的(套筒部分的)净内径与第一制动部件的外径之间的差值大于3mm并且小于90mm。同样优选的是,壳体部分(套筒部分)的外径在5mm或10mm到120mm之间。优选地,壳体部分的高度在5mm到120mm之间。在所有的改进中,优选地包括控制装置,该控制装置被设计成通过电线圈来实现可变的制动作用。
总之,本发明特别优选地根据楔形作用夹紧的基本原理操作,其中磁场集中器以一定间隔扫过壁。磁场引起楔形效应,从而可以产生高制动力矩。
通过使用“水平线圈”,还可以实现更好的可缩放性。以这种方式,可以通过更长的磁场集中器和轴向更长的电线圈产生可缩放且更大的制动力矩。这里,不需要为了传导相应的磁场而将第一制动部件的直径选择得较大,因为随着芯的轴向伸长,芯的面积(横截面积)也变大。如果仅需要相对较低的制动力矩,轴向长度也可显著减小。结构空间可以相应地调整。
另一个优点是,即使对于大规模生产,用于电线圈的电连接电缆也可以以直接的方式引出。磁流变制动装置的密封性和缩放性可以通过简单的方式实现。
由于有效长度增加,磁流变制动装置基本上可以通过较长(沿轴向)的磁场集中器产生较大的力矩。同时,通过较大的芯面积确保磁场集中器总是承受相应的磁通密度。可以将磁场集中器处的“楔形”中的磁场强度选择为高于现有技术中的磁场强度。可以使用能够传导足够强的磁场的长磁场集中器或多个轴向偏移的磁场集中器。
尤其是,在使用“径向线圈”的情况下,由电线圈产生的磁场轴向地穿过芯并且径向地穿过磁场集中器,并且经由(套筒部分或)壳体部分或外圆筒轴向地闭合。这里,磁场线一方面在壳体部分的一个例如下半部或左半部中闭合,另一方面在壳体部分的另一个例如上半部或右半部中闭合。
在简单的改进中,磁通量因此基本上二维地运行。这里,磁场集中器被设计为多长或多高并不重要。这样,可以实现长度方面的任何期望的缩放,因为磁场传输面积随之增加。
相比之下,在电线圈围绕第一制动部件的纵向方向同心地缠绕的情况下(“径向线圈”),芯中的横截面积保持相同,并且如果直径不改变则可以形成磁场的瓶颈。在机动车辆中的旋转拨盘的情况下,该芯总体上具有足以给予所希望的制动力矩的直径。在此,第一制动部件的所需直径对于磁流变制动装置的结构空间要求、安装尺寸和重量不是特别不利的。有利的是,在现在使用的静态磁场集中器的情况下,滚动体的旋转速度没有变化,这可能是不利的。
如果使用较长的磁场集中器,则在轴向方向上具有较长范围的磁场集中器的制动效果可以优于具有相同总长度的两个短磁场集中器的情况。这尤其是因为流体必须移动更长的距离,因为边缘更远(流体压力)。由于对称的结构,两个短的星形轮廓件又具有优点。
在优选的改进中,磁流变制动装置的壳体部分的(套筒部分的)直径在大约5到80mm(+/-20%)之间,在优选的改进中大约为10到40mm。
总之,本发明提供了具有磁流变制动装置(“MRF制动器”)的有利的触觉操作控制装置。这里,MRF制动器的外径通常是预定的,特别是在触觉应用中。这里有人体工程学参考。因此,芯横截面通常不能如此容易地增大,因为这样,外径也变得更大(拨盘外径;用于手指的表面)。此外,随着外径的增加,再次需要更大的阻挡力矩,因为力矩杠杆因此将变得更大(手指施加的力,即在一根或多根致动手指与制动元件或制动元件的外表面之间的(切向)力必须或应该保持相同,因为一方面,使用者只能施加一定的力,并且手指(指尖)处所需的力对于致动期间的身体舒适性(操作控制质量)是重要的)。
在优选的改进中,电线圈(线圈)可以轴向延伸。由线圈产生的磁场然后径向穿过芯,然后穿过磁场集中器,并穿过外圆筒(在每种情况下通过相对的半部)闭合。不管滚动体或MRF制动器有多高(或多长),这总是保持相同。
本发明实现了获得一种MRF制动器的目的,该MRF制动器尽可能简单但可容易地调节并且具有高制动力矩,同时具有紧凑的外径。
代替(圆柱形)线圈导线,也可以使用由铜或一些其它合适材料构成的具有合适轮廓的扁平材料或导线。
芯、磁场集中器和外圆筒可以由简单的钢制成(例如S235),而对表面条件和硬度没有严格要求,其优选具有良好的磁特性。相对于彼此移动并产生制动力矩的那些表面可以是粗糙的和/或具有表面结构(例如滚花、棱锥…)。
芯与电线圈和封装化合物一起优选地居中并固定(非强制锁定或强制锁定连接)在“保持器”中,并且反向扭矩经由所述保持器耗散到支架或基板或接收板或壳体。保持器优选具有孔,线缆通过该孔被引导。优选地,密封元件(例如O形环)相对于保持器或内部空间密封电缆,使得没有流体可以经由电缆从内部空间流到外部。除了(线圈)电缆之外,还可以引导温度传感器电缆或一些其它传感器电缆穿过所述开口。
保持器也可以由与芯、滚动体或外圆筒不同的材料制成。保持器在运行表面处的直径减小的优点在于,密封元件的摩擦半径变小,这减小了总摩擦。此外,由于所产生的增加的结构高度,可以使用具有等于壳体部分的内径的轴承外径的轴承元件。这降低了壳体部分的生产成本,并且不需要制造过程所必需的肩部(环钻)。优选的滚动体高度在3到6mm之间,但也可以是1或2mm。在此范围内,如果保持器的内径不产生额外的结构高度,则难以获得良好的轴承或密封元件。
装饰或其它元件(例如衬有橡胶的刻度盘)可以安装在外圆筒或壳体部分上。
从上方轴向观察,在外圆筒和封装化合物之间优选存在球或球形或球状部件(也可以是半球)。这相对于彼此引导两个部分。优选地,球固定在封装化合物中,并且外圆筒的内轴向端侧相对于其旋转。因此产生了简单、低摩擦且廉价的轴承装置(轴承点)。锥形等也是可能的。然而,代替这种类型的轴承布置,也可以使用任何其他类型的轴承布置(例如滑动轴承布置或滚动轴承布置)。
优选的是,由磁场流过的至少一个部件至少部分或全部由材料FeSi3P组成。
基本上可以不将星形轮廓件施加到芯,而是从内部施加到周围的壳体部分或套筒部分。这种结构在线圈设计方面具有优势。此外,获得了空间。在这种情况下,也可以选择不同的线圈变型。轴向线圈或“水平线圈”是可能的。绕旋转轴缠绕的线圈也是可能的。优选地,在电线圈的径向外侧不再有任何芯材料,因为否则磁场会通过该芯材料闭合,这会导致磁损耗。还可以设想使用多于一个的“水平线圈”,这取决于其如何定位。径向线圈也是容易想到的,因为这样,场经由所有“齿”或磁场集中器同时闭合。
在所有改进的优选开发中,可以产生的最大扭矩(有效间隙中场强的过程;楔形效应)和/或反应时间(在突然通电或电流阶跃变化或阶跃变化响应的情况下直到该时刻起作用的时间)取决于在臂处或在每种情况下磁场集中器的远端的选定进入角。由臂的径向端和相对表面的外部设计产生的角度和表面长度影响在有效间隙中磁场或场强的建立中可产生的最大扭矩和反应时间。较浅(较小)的进入角和/或较长的表面增加了可获得的力矩。更大(更陡)的进入角和/或更短的表面缩短了反应时间。较浅的角度是例如在0°到10°之间,或优选地在10°到20°之间的角度。较大的角度在20°到30°之间或30到45°之间。也可以产生负角,即具有向内的曲率。例如-5°。
混合不同的轮廓/角度/形状也是有利的。然后,星形轮廓件的一个锯齿/齿在相对低的转速下产生相对高的力矩,另一个锯齿/齿在中等转速下产生相对高的力矩,第三锯齿/齿在高转速下产生相对高的力矩。因此,可以提供在整个转速范围内产生高力矩的制动装置。
没有星形轮廓件的圆盘或环形凸缘更容易制造,因此可以以相对低的成本制造。然而,制动功率(制动力矩)不相同。根据对结构空间、生产成本和可能的制动力矩的要求,因此可以使用星形轮廓件(对于相对高的功率密度),或者在对功率密度的要求相对低但对生产成本的要求相对高的情况下使用连续盘。盘可以是旋转对称的形式。
然而,除了不同轮廓的不同制动力矩之外,还必须另外考虑不同的响应时间。安装的可磁化材料越多,磁化所有材料并赋予全功率(电感)所需的磁场越长。这意味着较少的材料缩短了致动器的响应时间。
因此,应用所需的响应/切换时间是轮廓选择中的附加标准。这些要求根据客户和预期用途而不同。非常细的波动/波纹(交变扭矩)需要非常短的响应时间(几毫秒)。
星形轮廓的轮廓元件或“齿”的典型尺寸或值总计为总直径的5%到15%。例如,在一个具体的改进中,星形轮廓件(具有向外突出的轮廓元件或“齿”)的最大直径是36mm,并且轮廓元件或磁场集中器或齿的高度达到大约2.5mm。因此最小直径等于31mm。这对应于直径的7%的相对尺寸。与圆盘形状具有典型偏差的星形轮廓件具有例如总直径的5-10%的凹陷。
优选地,凹陷的深度(或轮廓元件的高度)的范围是从0.25%到25%。尤其是在0.5%到10%之间。
齿(轮廓元件)的高度越小,制造成本变得越低。因此,仅使用与圆盘非常小的偏差是有利的。
与圆盘形状具有相对小偏差的星形轮廓件例如是总直径的1-3%的小缺口。
星形轮廓件的宽度也可以变化。在优选的改进中,宽度在1mm到25mm之间。尤其是,已经成功地测试了3mm和6mm的宽度。
特别优选地,根据本发明的触觉操作控制装置用于产生具有磁流变流体的制动装置或制动单元的高功率密度,其中,这通过集中磁场的轮廓元件来实现。
尤其是,以这种方式,羰基铁颗粒被从周围环境抽出并集中在磁场过渡区中。
本发明还涉及一种用于产生具有两个制动部件和磁流变流体以及至少一个电线圈的制动装置的增大的功率密度的方法,该增大的功率密度是通过一个静态制动部件和一个如下制动部件产生的,该制动部件围绕该静态制动部件的中心轴线旋转地移动并且与该静态制动部件直接磁性接触,集中磁场的轮廓元件被布置在这两个制动部件中的一个上并且尤其与之抗旋转地相连接。
另一种方法用于通过具有磁流变流体和至少一个电线圈的制动装置产生高功率密度,所述高功率密度通过静态元件和围绕静态元件的中心轴线旋转运动并与所述静态元件直接磁性接触的元件产生,所述元件集中磁场。
尤其是,羰基铁颗粒被从周围环境抽出并集中在磁场过渡区域。
优选地,绕中心轴线旋转运动的制动部件为单件形式。
附图说明
本发明的其它优点和特征将从示例性实施方式中显现,其将在下面参照附图进行讨论。
在附图中:
图1示出了用于车辆的具有磁流变制动装置的触觉操作控制装置的示意性三维视图;
图2示出了用于车辆的具有磁流变制动装置的另一触觉操作控制装置的截面;
图3a至图3b示出了用于车辆的触觉操作控制装置的磁流变制动装置,该磁流变制动装置具有楔形阻尼器,该楔形阻尼器具有分别位于电线圈的一侧上的两个星形轮廓件;
图4示出了磁流变制动装置的另一截面;
图5示出了磁流变制动装置的截面的另外的示意性截面;
图6示出了磁流变制动装置的又一示意性截面;
图7a至图7c示出了用于车辆的具有磁流变制动装置的触觉操作控制装置的相对于旋转角度的可能扭矩曲线。
附图标记列表:
1磁流变制动装置 20轴向方向
1a制动壳体 21芯
2、3制动部件 23旋转拨盘
4保持器 24外环
5间隙、通道 26电线圈
6介质 26c线圈平面
8场 26d径向方向
10锐角区域 28封装化合物
12轴 32横向槽
13壳体部分 33主体
13a内径 36a外径
13b外径 37圆柱形运行表面
13c高度 37a外径
13d壁厚 38密封件
13e套筒部分 40星形轮廓件
14闭合件 40a环形凸缘
15闭合件、盖 40b螺母
19磁性颗粒 43用户接口
45电缆 101操作控制拨盘
49覆盖物 110密封室
50支架 112第一支承点
67壳体部分13的内表面 113磁场产生装置
80磁场集中器 114密封室110的容积
81磁场集中器 121第一制动部件2的末端区段
82远端 200电器部件
83臂 226栅格点
84臂的径向长度 228端部止挡件
85间隙高度 229端部止挡件
86外表面 237角度间隔
87间隙尺寸 238止挡力矩
87a凹陷 239栅格力矩
100触觉操作控制装置 240基础力矩
具体实施方式
图1示出了作为电器部件200的根据本发明的用于车辆的触觉操作控制装置100。磁流变制动装置1用于或包括在车辆的触觉操作控制装置100中。
图1示出了触觉操作控制拨盘101。该操作控制拨盘通过支架50紧固。操作控制拨盘101借助壳体部分13或套筒部分13e操作。用户接口43还可用于传递信息。
在该示例性实施方式中,磁流变制动装置1具有壳体部分13或旋转部分或套筒部分13e,其以可旋转方式安置。旋转壳体部分13或旋转部分所需的扭矩是可设定的。
用户接口43可以设置在磁流变制动装置1的顶侧。这样的用户接口43例如可以形成为显示装置或触敏输入设备(触摸板、移动和手势控制、图像识别…)。
触觉操作控制装置100可以例如用于机动车辆中的操作控制。在车辆中,触觉操作控制装置100可用于例如空调系统、收音机、娱乐系统、导航系统、自适应巡航控制系统、驾驶员助理的操作控制、座椅的设置、以及信息娱乐系统的操作控制。
图2以截面示出了根据本发明的触觉操作控制装置100,其具有磁流变制动装置1。可以看到横向槽32,磁场产生装置113的电线圈26在芯21的轴向端部处缠绕在横向槽32中。这里,连接电缆45沿向下方向引出。磁场在芯21内沿径向方向26d垂直于线圈平面26c延伸。为了封闭的目的,封装化合物28分别设置在轴向方向的两端。在电缆引线通孔的区域中,通过例如所示的O形环等提供单独的密封。
在这种情况下,圆柱形壳体部分的壁厚由壳体部分13的外径13b和内径13a之间的壁厚来计算。
磁场集中器80和壳体部分13或套筒部分13e或第二制动部件3在轴向方向20上的长度或高度13c优选在1mm到100mm之间或在5mm到90mm之间。在外侧,覆盖物49可以应用于第二制动部件3,使得旋转拨盘23的外观基本上由覆盖物49的表面确定。
套筒部分13e或壳体部分13的材料整体上是导磁的并且用于闭合磁路。套筒部分13e的壁厚13d优选至少是磁场集中器80的径向范围的一半。壳体部分13形成外环24。
容座的外径36a优选显著大于圆柱形运行表面37的外径37a。这样,减小了密封件38处的摩擦。还可以使用标准化的轴承。
未示出的(凸缘安装的)传感器(旋转编码器、角度编码器)检测操作控制单元的旋转速度(旋转角度)。
这里,具有磁流变制动装置1的触觉操作控制装置100以悬臂方式安装。在这种情况下,第二制动部件3仅被安置在第一制动部件2的末端区段121上的封闭室110的第一末端处,也就是说,第二制动部件3仅被轴承布置安装在第一支承点112处。在封闭室内的容积变化的情况下,第二制动部件3可以容易地前后移动。在此,再次假设第一制动部件2是静止的。在这种情况下,第一制动部件2的直径的一部分在第一支承点112处移出或移入。封闭室110的容积114改变。该系统有利地实际上总是处于给定运动范围内的环境压力下。防止了密封件38上的额外负载。
图3a和图3b示出了用于触觉操作控制装置100的另一磁流变制动装置1。该磁流变制动装置1包括制动壳体1a,在这种情况下(图3b),制动壳体1a基本上由两个闭合件或盖14、15和壳体部分13组成。
第一制动部件2包括轴12,该轴在至少一侧以密封方式被引导出制动壳体1a。第二制动部件3包括制动壳体1a。操作控制拨盘101安置或形成在制动壳体1a的外部。
轴12还可以具有通道开口和例如纵向孔。
通常,第一制动部件2通过在此不可见的保持器4抗旋转地安置在支架50上或其它部分或部件上。然后,至少壳体部分13形成操作控制拨盘101等的可旋转部分。旋转壳体部分13所需的扭矩是可设定的。然而,制动壳体1a也可以被安装成是抗旋转的,并且轴12是可旋转的。
图3a例示了没有外部制动壳体1a并且没有壳体部分13的磁流变制动装置1。在此,包括两个星形轮廓件40,这两个星形轮廓件在芯21上被安置成在沿着轴12的轴向方向20上彼此间隔开。各星形轮廓件40形成为单独的部件,并且在这种情况下通过单独的螺母40b固定地紧固在芯21上。星形轮廓件在内部可以是圆柱形或圆锥形设计。
芯21和星形轮廓件40也可以分别具有相互适配的非圆形外轮廓和内轮廓,以便确保星形轮廓件40抗旋转地安置在芯21上。图3a在左上角示出了星形轮廓件40的视图,其内部具有通道开口。内轮廓可以是圆柱形(实线所示)或非圆形(多边形、椭圆形等)(虚线所示)。
磁场集中器80径向地形成在星形轮廓件40的外侧。在各个磁场集中器80之间分别形成凹陷87a。这里,星形轮廓件40的所有磁场集中器80整体地形成在星形轮廓件40上。不设置可旋转辊或其它旋转体作为磁场集中器80或其它。
根据图3a的磁流变制动装置1的两个星形轮廓件40可以具有相同的形式。然而,也可以将不同的星形轮廓件40布置在右手和左手端。尤其是,磁场集中器(其在所有改进中也可以被称为轮廓元件)也可以在右侧和左侧的星形轮廓件40上不同地形成(参见在图3a的上部中分别单独示出的星形轮廓件)。也可以在一个或每个端部上分别安置两个(或三个)不同的星形轮廓件。在此,轮廓元件可以具有几何上不同的设计并且相对于彼此具有不同的尺寸。
在根据图3b的截面中可以看出,轴12(也称为轴杆)通过密封件38相对于制动壳体1a密封。在两个星形轮廓件40之间设有线圈支架26b,其上缠绕有电线圈26。电线圈26可以直接邻接壳体部分13,然后以与芯21磁隔离的方式保持。或者,电线圈26可以直接邻接芯21,然后以与壳体部分13磁隔离的方式保持。
作为示例示出了磁场线8。磁场在星形轮廓件40之间大致轴向地穿过壳体部分13,并且在两个星形轮廓件40的区域中大致径向地穿过位于那里的间隙5,并且由磁场集中器80集中,使得在磁场集中器80的区域中产生楔形效应。磁场在芯21内在轴向方向20上闭合。
原则上,磁流变制动装置1具有带有两个星形轮廓件40的楔形轴承。在中心,有导磁轴或轴12,电线圈26径向缠绕在其周围。电线圈26产生由作为芯21的轴12放大的磁场8。磁场线8穿过一侧上的星形轮廓件40并且经由壳体部分13中的导磁外壁向前引导到另一侧上的第二星形轮廓件,磁场线经由该第二星形轮廓件返回到轴12并且闭合。因此,以高效的方式利用磁场8。作为阻尼介质的MRF位于星形轮廓件40与外壁(壳体部分13)之间的间隙5中。
在这种结构中,可以应用不同的星形轮廓件。为此,轴12具有锥形容座,其上分别形成(例如铣削)有星形轮廓件40的环形凸缘40a被推到该锥形容座上。然后,当拧紧时,环形凸缘40a后面的螺母40b将环形凸缘40a压到轴12上。
图4示出了具有(圆柱形)主体33的其他实施方式的两个示意性截面。具有磁场集中器80的星形轮廓件由单独的向外突出的径向臂83形成,其中径向臂83与芯21整体形成并且由具有良好磁导率的材料构成。
这里,每个单独的臂83缠绕有磁场产生装置113的电线圈26。电线圈26优选共同致动,但也可以不同地和/或单独地致动。在这种情况下,臂83的远端82和径向外端可以是楔形、圆形或其它角形式。
在作为磁场集中器81的径向向内突出的臂83的情况下,相应地,作为远端82的径向内端可以是楔形、圆形或其它角形式。可以产生的最大力矩和反应时间受形状的影响。
臂高度84比臂83的外端与壳体部分13的内表面67之间的径向间隙高度85大得多(10、50、100倍或更大)。
然而,臂83的外端与壳体部分13的内表面67之间的径向间隙高度85显著小于邻近臂83的第一制动部件2的外表面86(芯21或封装化合物28的表面)与壳体部分13的内表面67之间的径向间隙尺寸87。优选地,径向间隙尺寸87与径向间隙高度85的比率大于2、5或10或更大。一定的扩大对于楔形的形成是重要的。
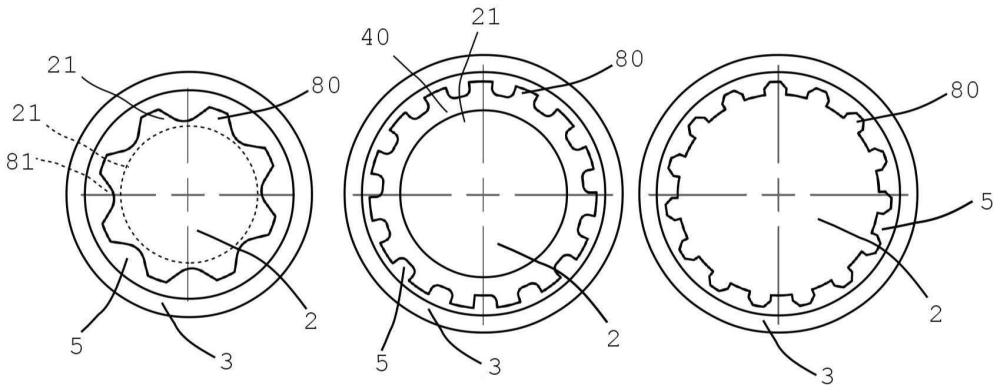
图5示出了形成有圆柱形空腔的壳体部分13上的芯21的三种不同外轮廓。在星形轮廓件上径向向外突出的磁场集中器80可以具有不同的形状。向外突出的磁场集中器80形成在圆周上可变的间隙5,使得当磁场8从芯21进入壳体部分13时,磁场8集中在磁场集中器80的区域中。星形轮廓件40由环形凸缘形成,磁场集中器80从环形凸缘向外突出。这些环形凸缘分别是中空的形式,并且在内侧上可以是非圆形的形式以便确保与芯的抗旋转连接,该芯于是在那里也是非圆形设计。
在纯示意性的图示中,图5的左手侧图像以虚线示出了一种变型,其中磁场集中器81向内突出并且芯21设置在内侧。然后产生逆图像。通过磁场集中器80或81的端部的成形可以获得不同的特性。因此可以将焦点放在更高的制动力矩或更快的反应时间上。
图6示出了具有中心圆柱形芯21和壳体部分13的示意性变型,磁场集中器81从壳体部分13以周期性间隔径向向内突出。示出了高度示意性的磁场线8,其径向穿过芯21和磁场集中器81之间的间隙5。在收缩处,MRF的磁性颗粒19的簇在填充有介质6的间隙5中互连并且在锐角区域10中形成楔(簇),从而产生高制动力矩。
除了示出的其中电线圈在轴向方向上缠绕在芯上的变型之外,其中电线圈26径向缠绕在旋转轴上的变型也是可能的。
图7a、图7b和图7c示出了用于控制作为旋转角度的函数的动态产生的磁场或动态产生的制动力矩的可能的设计变型。
在此,图7a示出了一种变型,其中旋转拨盘被用作触觉操作控制辅助件。该图示出了相对于旋转角度的旋转阻力。通过控制器,可以产生左侧端部止挡件228和右侧端部止挡件229。在旋转拨盘23向前旋转的情况下,在那里产生强磁场或止挡力矩238,由此旋转拨盘23受到抵抗旋转运动的高阻力。用户被提供有一个端部止挡件的触觉反馈。
这里,可以实现或产生旋转运动的栅格(波动/波纹)。例如,这可用于通过图形菜单导航并选择菜单点。这里,直接邻近左侧端部止挡件228,提供第一栅格点226,其在操作控制期间例如对应于第一菜单点。如果想要选择下一个菜单点,则旋转拨盘23必须顺时针旋转。为此,在到达下一个栅格点226之前,必须克服动态产生的较高磁场或制动力矩或其摩擦力矩。在图7a中,对于在每种情况下在栅格点226处和在位于栅格点226之间的区域处的某一角度范围,在每种情况下产生恒定磁场,该恒定磁场在栅格点处显著低于在位于栅格点226之间的区域中,并且又显著低于在止挡件228、229处。设定力矩或者结构上定义的基础力矩240可以在栅格点226处起作用。
各个栅格点之间的角度间隔237是动态可变的,并且适合于可用栅格点或菜单点的数量。
图7b示出了一种变型,其中,朝向端部止挡件228、229,磁场不突然增加,而是遵循陡峭的路线。此外,在栅格点226处,在每种情况下向两个旋转侧提供磁场的斜坡状梯度,由此旋转阻力在相应的旋转方向上增加。这里,利用相同的操作控制装置100,仅提供三个栅格点226,其角度间隔237大于图7a的示例中的角度间隔237。
图7c示出了一种变型,其中在各个栅格点226之间存在相对低的旋转阻力,并且在每种情况下仅在与栅格点226直接相邻处产生增大的磁场,以便允许在各个栅格点226处锁定,并且同时在各个栅格点之间仅提供低的旋转阻力。
图7a、图7b和图7c的操作模式和磁场路线的混合基本上也是可能的。例如,在不同的子菜单中,可以实现磁场路线的相应不同的设置(扭矩对角度)。
在所有情况下还可能的是,例如在波动(栅格)的情况下,不再像以前一样在具有相同极性的低和高电流强度之间进行切换(也就是说例如+0.2至+0.8A=波动),而是具有交替变化的极性,也就是说从+0.2至+0.8A,然后是-0.2A至-0.8A的下一个波动,然后是从+0.2至+0.8A的下一个瞬间峰值,等等。
在所有情况下,也可以通过语音命令来选择图7a、图7b和图7c的操作模式或操作模式的混合。用户通过语音输入(具有本地或远程语音识别,例如通过Alexa、Amazon Echo、Siri、Google语音输入…)选择功能(音量、站选择…)。磁流变制动装置然后提供相应的操作模式(音量=栅格:具有用于增加音量的增加的制动力矩;无线电站选择=栅格:具有不同步长宽度以及在两者之间的低制动力矩,直到站被找到)。
优选的低合金钢可以包括残余磁场。钢优选以规则的间隔或在需要时(特别是通过特殊的交变场)退磁。
材料FeSi3P(硅钢)或类似材料优选用于磁场流过的部件。
在所有情况下,可以实现基于语音或声音的控制。通过语音控制,可以自适应地控制制动装置。
当旋转单元不旋转时,即角度恒定时,电流优选随时间连续减小。电流也可以以速度(旋转单元的旋转角速度)相关的方式变化。
- 车辆触摸显示屏的触觉反馈方法、系统及控制装置
- 用于车辆的控制装置以及用于车辆的控制方法
- 用于倾斜车辆座椅靠背的装置以及用于安装这种倾斜装置的方法
- 用于标定车辆传感器的标定装置、方法及车辆
- 用于混合动力车辆的陡坡缓降控制方法、装置及车辆
- 用于车辆的触觉操作控制装置和方法
- 用于车辆的触觉操作控制装置和方法