光电传感器以及光测距装置
文献发布时间:2023-06-19 19:27:02
技术领域
本发明涉及光电传感器以及光测距装置。
背景技术
在专利文献1中公开了一种用于检测监视区域内的物体的光电传感器,其目的在于,在宽的动态范围内对接收信号尽可能忠实地放大信号。
该光电传感器具备:用于发送光的发光器;用于将碰到物体而漫反射的光变换成光电流的受光器;和用于根据从所述光电流导出的接收信号来测定物体的特性的评价部,在所述受光器与所述评价部之间,为了在更宽的动态范围检测所述漫反射光,设置具有更高灵敏度的放大器的高灵敏度接收路径和具有更低灵敏度的放大器的低灵敏度接收路径,根据所述漫反射光的强度,在所述高灵敏度接收路径或所述低灵敏度接收路径中,根据被分割到所述接收路径的光电流来生成所述接收信号。
而且,构成为至少所述低灵敏度接收路径具备二极管阵列,使用该二极管阵列的正向电压来规定所述漫反射光的强度的阈值,仅在超过所述阈值的情况下,使光电流在所述低灵敏度接收路径中流过。
根据上述的光电传感器,接收信号在比各个接收路径的动态范围更宽的动态范围内几乎不丢失信息地被放大。仅在超过正向电压的情况下,电流流入低灵敏度接收路径的放大器,在接收输出小的情况下,光电流整体被导入高灵敏度接收路径,因此不会产生灵敏度损失。
在先技术文献
专利文献
专利文献1:JP特开2014-142340号公报
发明内容
-发明所要解决的课题-
但是,专利文献1所记载的光电传感器需要在具备二极管阵列的单一或多个低灵敏度接收路径和高灵敏度接收路径分别具备高价的跨阻放大器,存在部件成本增加的问题。
本发明的目的在于,提供一种能在不使用多个跨阻放大器的情况下在宽的动态范围内合适地检测光的廉价的光电传感器以及光测距装置。
-用于解决课题的手段-
为了实现该目的,本发明的光电传感器的第一特征结构是检测监视区域内的物体的光电传感器,具备:投光部,其朝向监视区域输出测定光;受光部,其将测定光碰到物体而漫反射的反射光变换成电流信号;前置放大器,其将被所述受光部变换得到的所述电流信号变换成电压信号;第1信号处理系统,其具备将所述前置放大器的输出信号以第1放大率A1进行放大的第1放大器和将所述第1放大器的输出信号以第1阈值Vth1进行二值化的第1二值化电路;和第2信号处理系统,其具备将所述前置放大器的输出信号以第2放大率A2进行放大的第2放大器和将所述第2放大器的输出信号以第2阈值Vth2进行二值化的第2二值化电路,所述第1阈值Vth1和所述第2阈值Vth2、以及所述第1放大率A1和所述第2放大率A2设定成满足以下的关系式1<(Vth2/Vth1)<α=(A2/A1)。
将从投光部输出的测定光碰到物体而漫反射的反射光在受光部进行检测并变换成电流信号,将该电流信号在前置放大器变换成电压信号并输入到第1信号处理系统和第2信号处理系统。在第1信号处理系统中,输出将该电压信号在通过第1放大器以第1放大率A1被放大后在第1阈值Vth1的第1二值化电路进行二值化而得到的脉冲信号。同样地,在第2信号处理系统中,输出将该电压信号通过第2放大器以第2放大率A2(A1<A2)被放大后在第2阈值Vth2(Vth1<Vth2)的第2二值化电路进行二值化而得到的脉冲信号。进而,由于第1阈值Vth1和第2阈值Vth2、以及所述第1放大率A1和所述第2放大率A2设定成满足1<(Vth2/Vth1)<α=(A2/A1)的关系式,因此,即使是在第1信号处理系统中无法得到二值化输出那样的低电平的输入信号,也能在第2信号处理系统中得到二值化输出。
该第二特征结构在上述的第一特征结构基础上,具备:距离运算电路,其基于从所述投光部输出的测定光的输出时期和从所述第1信号处理系统或所述第2信号处理系统输出的二值化信号的上升时期,来算出从所述光电传感器到物体的距离。
距离运算电路根据测定光的输出时期和二值化信号的上升时期即漫反射光的检测时期来算出光电传感器与物体间的光的传播时间,基于光的传播时间和光的速度来算出从光电传感器到物体的距离。
该第三特征结构在上述的第一或第二特征结构基础上,具备:距离补正电路,其基于所述二值化信号的脉冲宽度来补正通过所述距离运算电路算出的距离。
二值化信号的上升沿根据向二值化电路输入的电压信号的特性而变动,若电压信号的峰值高,则陡峭地上升,若电压信号的峰值低,则平缓地上升。为此,能基于从二值化信号的上升时期到下降时期的时间即脉冲宽度来推定向二值化电路输入的电压信号的峰值。为此,距离补正电路求取对各二值化信号的上升时期的补正量,以使得成为针对预先设为基准的电压信号的二值化信号的上升时期,将与补正量对应的距离作为补正距离,来补正在距离运算电路算出的距离。
该第四特征结构在上述的第二或第三特征结构基础上,具备:时间判定电路,其在所述二值化信号的脉冲宽度为给定的阈值以上的情况下容许所述距离运算电路算出距离,在所述脉冲宽度不足给定的阈值的情况下,禁止所述距离运算电路算出距离。
在与在受光部检测到的光对应地得到的二值化信号的脉冲宽度与测定光的脉冲宽度相比非常短的情况下,能判断为干扰。为此,时间判定电路在二值化信号的脉冲宽度为给定的阈值以上的情况下,判断为是真正的漫反射光,从而容许距离运算电路算出距离,在脉冲宽度不足给定的阈值的情况下,判断为干扰,从而禁止距离运算电路算出距离。
该第五特征结构在上述的第二到第四任一者特征结构基础上,具备:信号选择电路,其在从所述第1信号处理系统以及所述第2信号处理系统双方同时期输出二值化信号的情况下,选择从所述第1信号处理系统输出的二值化信号,在仅从所述第2信号处理系统输出二值化信号的情况下,选择从所述第2信号处理系统输出的二值化信号,并输出到所述距离运算电路。
在从具备增益小的第1放大器的第1信号处理系统和具备增益大的第2放大器的第2信号处理系统分别输出二值化信号的情况下,有可能在第2信号处理系统所具备的第2放大器产生增益压缩从而产生波形钝化。为此,通过信号选择电路选择从第1信号处理系统输出的二值化信号,能得到更正确的距离。此外,在仅从第2信号处理系统输出二值化信号的情况下,通过选择对无法在第1信号处理系统中二值化的微弱的电压信号以增益高的第2放大器恰当进行放大而得到的二值化信号,即使是微弱的电压信号,也能恰当地算出距离。
该第六特征结构在上述的第二到第四任一者特征结构基础上,具备:输出选择电路,其在基于从所述第1信号处理系统输出的二值化信号通过所述距离运算电路算出的第1距离与基于从所述第2信号处理系统输出的二值化信号通过所述距离运算电路算出的第2距离的差分不足给定的距离阈值的情况下,输出所述第1距离,在所述第2距离为给定的远程距离阈值以上的情况下,输出所述第2距离。
在第1距离与第2距离的差分不足给定的距离阈值的情况下,由于是来自相同物体的漫反射光的可能性高,因此,输出选择电路输出基于被恰当放大的从第1信号处理系统输出的二值化信号得到的第1距离,在第2距离为给定的远程距离阈值以上的情况下,判断为在具备增益小的第1放大器的第1信号处理系统中难以算出正确的距离,通过无论有无算出第1距离都输出第2距离,能在距光电传感器的距离短的范围到长的范围的大范围输出精度高的距离。
该第七特征结构在上述的第一特征结构基础上,具备:输出接口电路,其将第1信号处理系统的输出信号以及所述第2信号处理系统的输出信号双方输出到外部。
通过经由输出接口电路将第1信号处理系统的输出信号以及所述第2信号处理系统的输出信号双方输出到外部,光电传感器的使用者能根据光电传感器的使用状况,随机应变地进行考虑了第1信号处理系统和第2信号处理系统的各特性的距离运算。
本发明的光测距装置的特征结构具备:具备上述的第二到第六任一者的特征结构的光电传感器;光偏转部,其将从所述投光部输出的测定光向给定方向进行偏转;和/或光扫描部,其将从所述投光部输出的测定光向给定方向进行偏转扫描。
通过具备将从具备上述的任一者特征结构的光电传感器的投光部输出的测定光进行偏转或进行扫描的光偏转部和/或光扫描部,能实现求取到存在于特定的方向的物体的距离的光测距装置。
-发明效果-
如以上说明的那样,根据本发明,能提供不使用多个跨阻放大器能在宽的动态范围检测光的廉价的光电传感器以及光测距装置。
附图说明
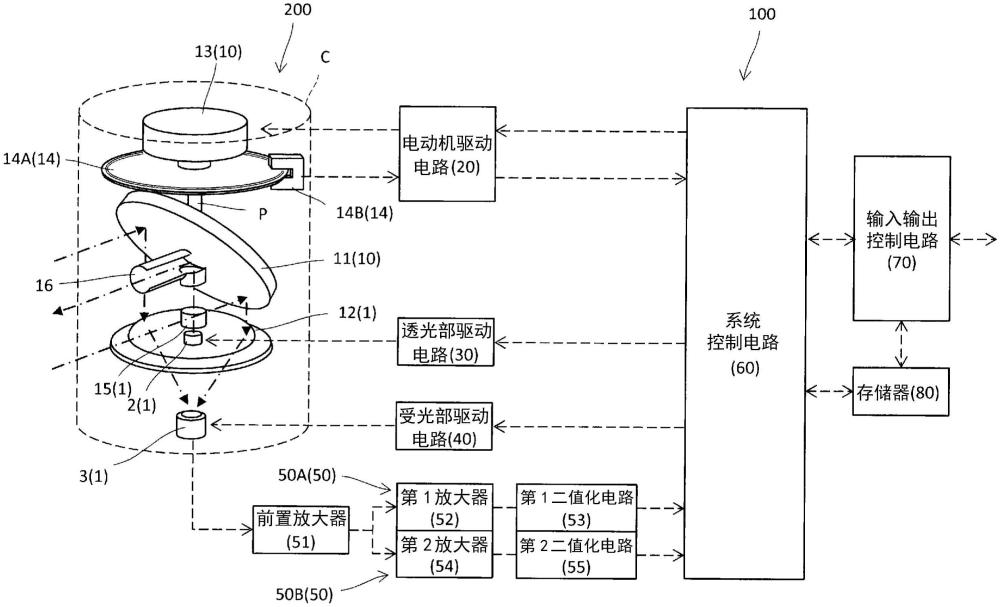
图1是具备光电传感器的光测距装置的结构说明图。
图2是光电传感器所具备的信号处理电路的说明图。
图3是放大器的输出信号的大小与二值化信号的关系说明图。
图4是针对相同输入信号的第1放大器和第2放大器的输出信号的说明图。
具体实施方式
以下,说明本发明的光电传感器以及光测距装置的实施方式。
在图1中示出具备光电传感器1的光测距装置200以及装入光电传感器1中的信号处理电路100。光测距装置200收容在具备透光窗的外壳(图中例示为以虚线示出的筒状体)C中,具备:光电传感器1,其检测监视区域内的物体;和光扫描部10,其将从光电传感器1输出的测定光朝向监视区域扫描,将从存在于监视区域的物体的表面漫反射的反射光引导到光电传感器1。
光电传感器1具备:经由外壳C所具备的透光窗朝向监视区域输出测定光的投光部2;投光透镜15;将在投光透镜15被波形整形的测定光碰到存在于监视区域的物体而漫反射的反射光聚光的聚光透镜12;接受由聚光透镜12聚光的反射光并将其变换成电流信号的受光部3;和对在受光部3变换后的电流信号进行处理的信号处理电路100。信号处理电路100由装配于基板上的多个电路元件构成,实际收容于外壳C的底部等。
光扫描部10具备:偏转镜11,其将从投光部2输出的测定光朝向监视区域偏转,并且将来自物体的反射光引导到受光部3;电动机13,其将偏转镜11绕着旋转轴P旋转驱动;和编码器14,其探测电动机13的旋转速度。编码器14由如下要素构成:在外周以给定间隔形成狭缝并绕着旋转轴P旋转的圆盘14A;和检测透过形成于圆盘14A的狭缝的光的透过型的光遮断器14B。
偏转镜11相对于旋转轴P以45度倾斜的姿势被固定,在旋转轴P的轴心上分别配置受光部3、聚光透镜12、投光部2、投光透镜15。从投光部2输出的测定光穿过投光透镜15,在被波形整形成平行光后沿着光导16传播,通过偏转镜11以直角被偏转,与偏转镜11的旋转一起被偏转扫描,并输出到监视区域。
来自物体的反射光在光导16的周围空间中传播并入射到偏转镜11,在偏转到旋转轴P的轴心方向后,穿过聚光透镜12而入射到受光部3。作为投光部2而使用输出近红外域的激光的激光二极管,作为受光部3而使用雪崩光电二极管(以下,也记作“雪崩光电二极管3”)。
信号处理电路100具备电动机驱动电路20、投光部驱动电路30、受光部驱动电路40、受光信号处理电路50、系统控制电路60、输入输出控制电路70、以及存储器80等。
系统控制电路60是如下那样的电路块:由FPGA等构成,对电动机驱动电路20、投光部驱动电路30、受光部驱动电路40、受光信号处理电路50进行控制,并且进行测距运算,将运算结果贮存到存储器80。
输入输出控制电路70是如下那样的电路块:将贮存于存储器80的运算结果读出并进行必要的处理,经由以太网(注册商标)在与外部装置之间交换处理结果等信号。另外,与外部装置之间的通信接口并不限于以太网(注册商标)。
电动机驱动电路20是如下那样的电路:将来自编码器14的脉冲信号传递到系统控制电路60,基于来自系统控制电路60的控制信号来驱动电动机13。
投光部驱动电路30是基于来自系统控制电路60的控制信号来脉冲驱动构成投光部2的激光二极管的电路,系统控制电路60基于来自编码器14的脉冲信号来掌握偏转镜11的旋转位置,并且掌握激光二极管的驱动定时而对投光部驱动电路30输出控制信号。
如图2所示那样,受光部驱动电路40是控制构成受光部3的雪崩光电二极管3的驱动电压的电路,具备探测受光部3的附近温度的温度传感器Sth和高压产生电路,基于来自系统控制电路60的控制信号来调整高压产生电路的输出电压。系统控制电路60为了基于温度传感器的输出来补偿受光部3的温度特性,将高压产生电路的输出电压可变控制在给定电压(本实施方式中约150V)附近。
如图1、2所示那样,受光信号处理电路50是对反射光被雪崩光电二极管3光电变换而得到的电流信号进行处理的电路,具备:使用了将电流信号变换成电压信号的跨阻放大器TIA的前置放大器51;第1信号处理系统50A;和第2信号处理系统50B,其中,该第1信号处理系统50A具备:将前置放大器51的输出信号以第1放大率A1进行放大的第1放大器52;和将第1放大器52的输出信号以第1阈值Vth1进行二值化的第1二值化电路53,该第2信号处理系统50B具备:将前置放大器51的输出信号以第2放大率A2进行放大的第2放大器54;和将第2放大器54的输出信号以第2阈值Vth2进行二值化的第2二值化电路55。
被雪崩光电二极管3光电变换而得到的电流信号经由电阻分压电路被分压,并经由耦合电容器变换成除去了直流成分的交流信号后,输入到前置放大器51。
第1放大器52由使用了OP放大器的反相放大器AMP1构成,第2放大器54由使用了OP放大器的反相放大器AMP2(54A)和差动放大器AMP3(54B)构成。第2放大器54也可以是单一的反相放大器。
第1阈值Vth1和第2阈值Vth2被设定成满足以下的关系式。
1<(Vth2/Vth1)<α=(A2/A1)
即,Vth1<Vth2<α×Vth1、1<a=A2/A1
由此,即使是在第1信号处理系统50A中无法得到二值化输出那样的低电平的输入信号,也能在第2信号处理系统50B中得到二值化输出。
在本实施方式中,前置放大器51的放大率被设定为80dB,第1放大器52的第1放大率A1被设定为16dB,第2放大器54的第2放大率A2被设定为41dB。第2放大率A2相对于第1放大率A1的真值显示中的比的值α=A2/A1与对数显示的放大率的差的值(25dB(=41dB-16dB))相等。因此,放大率的比的值α约为17.8,比1大。
此外,第1阈值Vth1被设定为0.16V,第2阈值Vth2被设定为0.40V。第2阈值Vth2相对于第1阈值Vth1的真值显示中的比的值是2.5,比1大,且比值α小,上述的关系式成立。另外,第2阈值Vth2相对于第1阈值Vth1的对数显示中的差的值是7.96dB,比0dB大,且比第2放大率A2相对于第1放大率A1的对数显示的放大率的差的值(25dB)小。
即,第1信号处理系统50A成为低灵敏度信号处理系统,第2信号处理系统50B成为高灵敏度信号处理系。由于前置放大器51的输出信号分别被供给到第1信号处理系统50A和第2信号处理系统50B,即使是在低灵敏度的第1信号处理系统50A中无法得到二值化输出那样的低电平的输入信号,也能在高灵敏度的第2信号处理系统50B中得到二值化输出。
在系统控制电路60中,除了对上述的电动机驱动电路20、投光部驱动电路30、受光部驱动电路40的控制以外,还具备距离运算电路、距离补正电路、时间判定电路等,在输入输出控制电路70所具备输出选择电路等。距离运算电路、距离补正电路、时间判定电路每当光扫描部10的单位扫描时工作,来算出到监视区域内的物体的距离以及扫描角度,并将该结果贮存到存储器80中。
将在第1信号处理系统50A所具备的第1二值化电路53以及第2信号处理系统50B所具备的第2二值化电路55中被二值化的信号输入到系统控制电路60的距离运算电路,并通过距离运算电路所具备的时间数字转换器电路(Time-to-Digital Converter)来算出对投光部2的驱动信号的输出时期与被光电变换后的反射光的二值化信号的上升时期的时间差,基于该时间差和光速来算出到物体的距离。此外,由于根据基于来自编码器14的脉冲信号而掌握的各测定光的输出时的偏转镜11的旋转位置(扫描角度)来求取测定光的扫描角度,因此确定到物体的距离和方位。
即,距离运算电路构成为基于从投光部2输出的测定光的输出时期、和从第1信号处理系统50A或第2信号处理系统50B输出的二值化信号的上升时期来算出从光电传感器到物体的距离。
如图3所示那样,与由放大器52、54放大后的反射光相当的电压信号即使在从从接地电平上升的上升时期到之后下降到接地电平的下降时期为止的时间ΔT相同但峰值不同的情况下,上升的斜率分别不同,即使在以相同阈值Vth进行了二值化的情况,针对峰值低的电压信号的二值化信号与针对峰值高的电压信号的二值化信号相比,上升时期慢,脉冲宽度也变短(在图3中,将针对峰值低的电压信号的二值化信号的脉冲宽度标注为ΔTL,将针对峰值低的电压信号的二值化信号的脉冲宽度标注为ΔTH)。
因此,二值化信号的上升时期根据向二值化电路53、55输入的电压信号的特性而发生变动,若电压信号的峰值高,则陡峭地上升,若电压信号的峰值低,则平缓地上升。并且,在作为从二值化信号的上升时期到下降时期的时间的脉冲宽度、与从本来反射光到达的时间点t0到二值化信号的上升时间点的时间差之间,存在给定的相关关系。为此,能基于任意的二值化信号的脉冲宽度(例如ΔTL、ΔTH),来推定从本来反射光到达的时间点t0到二值化信号的上升时间点的时间差(例如dt1、dt2)。
为此,通过预先准备基于上述的相关关系并根据针对任意的电压信号的二值化信号的脉冲宽度来求取到本来反射光到达的时间点t0为止的时间差dt的补正表格,来求取补正量(时间差dt)。另外,还能取代补正表格而使用补正式。
实际上,为了排除光测距装置200所具备的投光部2、受光部3、电路元件的部件偏差、机械公差的影响,检测针对来自收容于外壳C且基准距离已知的基准反射板的反射光的电压信号作为基准电压信号,求取对相对于该基准电压信号的上升时间点t0的时间差dt进行补正的补正系数,以使得根据对投光部2的驱动信号的输出时期与将基准电压信号二值化后的上升时期的时间差求得的距离成为基准距离,用该补正系数来补正上述的补正表格的各补正量(时间差dt)。
距离补正电路针对任意的二值化信号根据补正表格来求取补正量(时间差dt),基于用上述的补正系数进行了补正的补正量来算出补正距离,对在上述的距离运算电路中算出的距离进行增减补正。另外,距离补正电路可以分别分开具备针对第1信号处理系统50A的补正表格和针对第2信号处理系统50B的补正表格。
时间判定电路构成为在二值化信号的脉冲宽度为给定的阈值以上的情况下,容许距离运算电路算出距离,在二值化信号的脉冲宽度不足给定的阈值的情况下,禁止距离运算电路算出距离。
在与受光部3中检测到的光对应地得到的二值化信号的脉冲宽度与测定光的脉冲宽度相比非常短的情况下,能判断为干扰。为此,时间判定电路在二值化信号的脉冲宽度为给定的阈值以上的情况下,判断为是真正的漫反射光,从而容许距离运算电路算出距离,在脉冲宽度不足给定的阈值的情况下,判断为干扰,从而禁止距离运算电路算出距离。作为给定的阈值,优选设定测定光的脉冲宽度的0.2倍~0.4倍的范围的值,但并不限于该值。至少设定为比测定光的脉冲宽度短的值即可。
如此地,对于经过第1信号处理系统50A以及第2信号处理系统50B而输入的各二值化信号分别算出到物体的距离以及方位。进而,对所算出的各值进行滤波处理,将判定为恰当作为检测对象的物体的距离以及方位贮存到存储器80中。
作为滤波处理,能采用尺寸判定滤波器等,沿着相邻的扫描方向连续给定数以上地检测物体,且若各距离的差分为给定值以内,则判定为是有效的物体,若除此以外,则作为噪声除去。通过这样的处理,能排除雨滴、雾等干扰。
输入输出控制电路70所具备的输出选择电路每隔单位扫描周期将写入到存储器80的距离以及方位读出,并算出与第1信号处理系统50A对应的第1距离和与第2信号处理系统50B对应的第2距离的差分,在差分不足给定的距离阈值的情况下,即,在能判断为相同物体的情况下,将第1距离输出到外部设备。
由于在第1距离与第2距离的差分不足给定的距离阈值的情况下,是来自相同物体的漫反射光的可能性高,因此,输出选择电路输出基于被恰当放大后的从第1信号处理系统输出的二值化信号得到的第1距离,在第2距离为给定的远程距离阈值以上的情况下,判断为在具备增益小的第1放大器的第1信号处理系统中难以算出正确的距离,无论有无算出第1距离,都输出第2距离,能在从距光电传感器的距离短的范围到长的范围的大范围输出精度高的距离。
此外,输出选择电路构成为在第2距离为给定的远程距离阈值以上的情况下输出第2距离。这是因为,即使是在低灵敏度的第1信号处理系统50A中无法检测到的远方的物体,也能通过高灵敏度的第2信号处理系统50B检测到。
进而,输出选择电路具备近距离除去功能,其在到检测到的物体的距离不足预先设定的近距离阈值的情况下不进行输出。由此,避免了将起因于外壳C的污渍的反射光作为有效的物体来进行输出。近距离阈值可以在低灵敏度的第1信号处理系统50A和高灵敏度的第2信号处理系统50B分被设定为个别的值。
在图4中,与以某扫描角度输出的测定光对应地示出第1信号处理系统50A所具备的第1放大器52的输出信号和第2信号处理系统50B所具备的第2放大器54的输出信号。示出针对起因于外壳C的污渍的反射光的近距离信号、第1回波信号、第2回波信号、第3回波信号。
在这样的情况下,通过上述的输出选择电路将与不足近距离阈值的污渍对应的信号排除,位于大致相同距离的第1回波、第2回波基于将第1信号处理系统50A所具备的第1放大器52的输出信号二值化后的信号来求取距离,成为远距离阈值以上的第3回波基于将第2信号处理系统50B所具备的第2放大器54的输出信号二值化后的信号来求取距离。另外,如图4所示那样,由于被第2放大器54放大后的第1回波、第2回波的信号波形过饱和,因此难以算出正确的距离。
另外,构成为,在通过上述的滤波处理在判断为第1回波是与无效的物体例如雨、雾对应的信号的情况下,判断为第1回波是无效的信号,并避免输出。此外,还能做出为了防止碰撞而优先处理近距离的第1回波的距离的系统、为了探测位于细的物体的背后的物体而利用第2回波的系统等、根据目的与各种滤波处理适当组合来选择/利用回波的系统。
以下,示出其他实施方式。
在系统控制电路60也可以具备在上述的实施方式中说明的输出选择电路的功能。具体地,构成为如下即可:在从第1信号处理系统50A以及第2信号处理系统50B双方同时期输出二值化信号的情况下,选择从第1信号处理系统50A输出的二值化信号,在仅从第2信号处理系统50B输出二值化信号的情况下,选择从第2信号处理系统50B输出的二值化信号,输出到距离运算电路。所谓从双方同时期输出二值化信号的情况,是指二值化信号的上升沿的时间差进入给定的容许范围的情况。
在上述的实施方式中,说明了具备光扫描部10的光测距装置200,其中,光扫描部10将从光电传感器1所具备的投光部2输出的测定光向给定方向进行偏转扫描,但还能构成具备光偏转部的光测距装置,其中,光偏转部将从投光部输出的测定光向给定的一方向进行偏转。
在上述的实施方式中,说明了装入光测距装置200的光电传感器1,但也可以是单独的光电传感器1。
也可以具备输出接口电路,其将光电传感器1所具备的第1信号处理系统50A的输出信号以及第2信号处理系统50B的输出信号这双方与表示测定光的输出时期的信号一起直接输出到外部。光电传感器1的使用者能根据光电传感器的使用状况,随机应变地进行考虑了第1信号处理系统和第2信号处理系统的各特性的距离运算。
上述的实施方式的受光信号处理电路50也可以具备:前置放大器51,其使用了将反射光被雪崩光电二极管3光电变换而得到的电流信号变换成电压信号的跨阻放大器TIA,将前置放大器51的输出信号分别供给到第1信号处理系统50A和第2信号处理系统50B,但也可以还具备:第n信号处理系统50n,其具备将前置放大器51的输出信号以第n放大率An进行放大的第n放大器;和将第n放大器的输出信号以第n阈值Vthn进行二值化的第n二值化电路(n:3以上的整数)。
第(n-1)信号处理系统和第n信号处理系统只要设定成第(n-1)阈值Vth(n-1)和第n阈值Vthn、以及第(n-1)放大率A(n-1)和第n放大率An满足以下的关系式即可。
1<(Vthn/Vth(n-1))<α=(An/A(n-1))
由此,即使是在第(n-1)信号处理系统中无法得到二值化输出那样的低电平的输入信号,也能在第n信号处理系统中得到二值化输出。
此外,第n信号处理系统50n可以作为低灵敏度的第1信号处理系统50A与高灵敏度的第2信号处理系统50B之间的中间灵敏度的处理系统来设置。只要至少第1信号处理系统50A和第2信号处理系统50B满足关系式1<(Vth2/Vth1)<α=(A2/A1)即可,只要具备将前置放大器51的输出信号以第n放大率An进行放大的第n放大器和将第n放大器的输出信号以第n阈值Vthn进行二值化的第n二值化电路即可。
上述的实施方式均只不过是本发明的一实施例,并不通过该记载来限定本发明的范围,当然各部的具体的结构在起到本发明的作用效果的范围内能适当变更。
产业上的可利用性
本发明能实现不使用多个跨阻放大器能在宽的动态范围内检测光的廉价的光电传感器以及光测距装置。
-符号说明-
1:光电传感器
2:投光部
3:受光部
10:光扫描部
11:偏转镜
12:聚光透镜
20:电动机驱动电路
30:投光部驱动电路
40:受光部驱动电路
50:受光信号处理电路
50A:第1信号处理系统
50B:第2信号处理系统
51:前置放大器
52:第1放大器
53:第1二值化电路
54:第2放大器
55:第2二值化电路
60:系统控制电路
70:输入输出控制电路
80:存储器
100:信号处理电路。
- 应用光电振荡器(OEO)的光测距雷达(LIDAR)和光频域反射计(OFDR)系统
- 一种基于结构光和双图像传感器的测距装置及其测距方法
- 视觉图像传感器与点光测距传感器测量坐标系的统一方法
- 温度传感器、激光电路、光检测和测距系统及方法
- 红外光电传感器抗强环境光自适应测距方法